基于改進YOLOv3的電力設備紅外目標檢測模型
2021-04-13 01:42:48鄭含博李金恒崔耀輝
電工技術學報 2021年7期
鄭含博 李金恒 劉 洋 崔耀輝 平 原
基于改進YOLOv3的電力設備紅外目標檢測模型
鄭含博 李金恒 劉 洋 崔耀輝 平 原
(廣西大學電氣工程學院 南寧 530004)
紅外圖像檢測技術因具有非接觸、快速等優點,被廣泛應用于電力設備的監測與診斷中,而對設備快速精確地檢測定位是實現自動檢測與診斷的前提。與普通目標的可見光圖像相比,電力設備的紅外圖像可能存在背景復雜、對比度低、目標特征相近、長寬比偏大等特征,采用原始的YOLOv3模型難以精確定位到目標。針對此問題,該文對YOLOv3模型進行改進:在其骨干網絡中引入跨階段局部模塊;將路徑聚合網絡融合到原模型的特征金字塔結構中;加入馬賽克(Mosaic)數據增強技術和Complete-IoU(CIoU)損失函數。將改進后的模型在四類具有相似波紋外觀結構的電力設備紅外圖像數據集上進行訓練測試,每類的檢測精度均能達到92%以上。最后,將該文方法的測試結果與其他三個主流目標檢測模型進行對比評估。結果表明:不同閾值下,該文提出的改進模型獲得的平均精度均值優于Faster R-CNN、SSD和YOLOv3模型。改進后的YOLOv3模型盡管在檢測速度上相比原YOLOv3模型有所犧牲,但仍明顯高于其他兩種模型。對比結果進一步驗證了所提模型的有效性。
電力設備檢測 YOLOv3 卷積神經網絡 紅外圖像
0 引言
電力設備的安全穩定運行是確保電網可靠供電的關鍵。通過及時檢測電力設備的運行狀態,能夠預防由設備缺陷或故障引起的電網事故發生。紅外熱成像技術提供了一種非接觸的檢測方式來獲取電力設備的熱狀態信息,使電力設備的狀態檢測能在不斷電的情況下進行,被廣泛應用于電力設備的帶電檢測中。不同場景下電力設備的紅外圖像如圖1所示,紅外圖像能夠顯示設備的溫度分布和范圍,并通過不同等級的色調來表示設備不同部位的溫度[1]。但目前對電力設備紅外圖像數據的分析與診斷仍需依賴經驗豐富的電力工程師[2],這就消耗了大量的人力和時間成本,極大地降低了電力設備狀態檢測與評估的效率。因此,研究更快、更準確的電力設備狀態自動檢測方法已成為近年的熱點課題[1-3],而對設備快速精確地定位是實現自動檢測與診斷的前提和關鍵[4]。
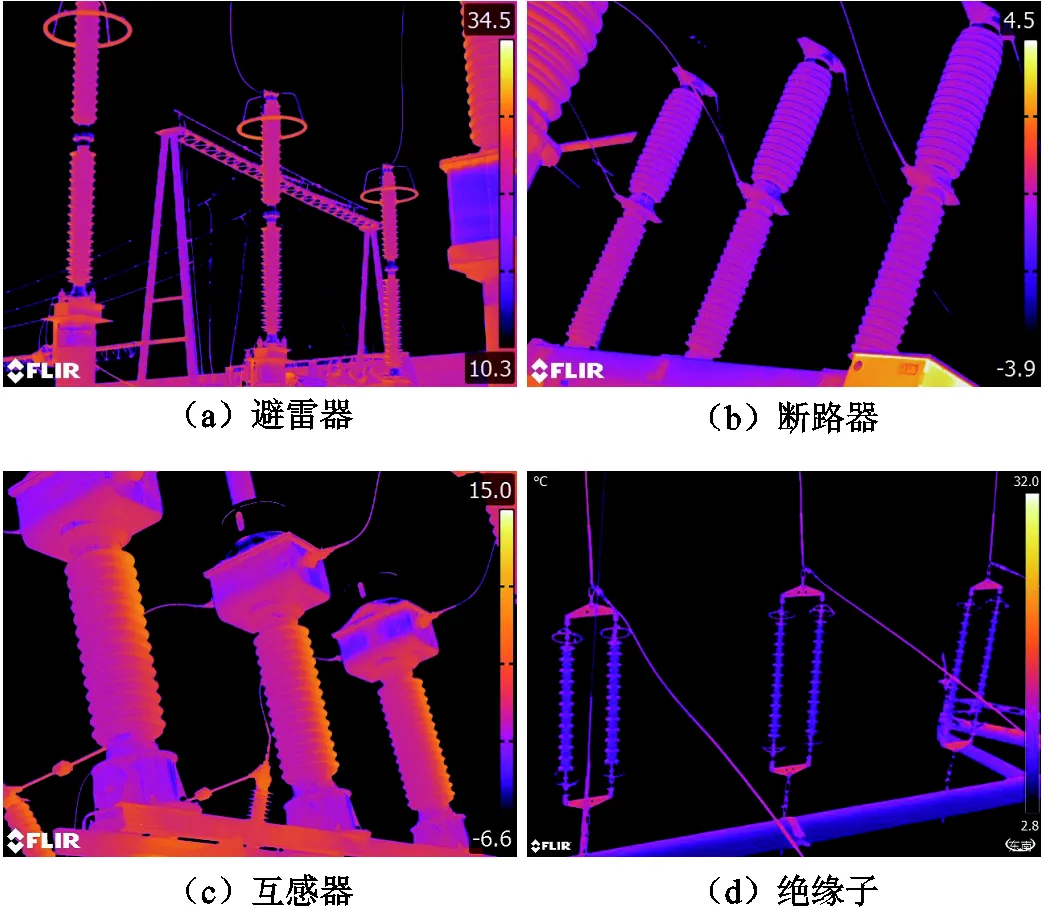
圖1 不同場景下電力設備的紅外圖像
針對電力設備圖像目標定位研究,一些傳統的目標檢測方法[5-8]通常分三個階段:①利用選擇性搜索方法在給定的圖像上選擇候選區域;②利用構造的特征描述符提取圖像特征;③使用分類器對特征進行分類。文獻[6]先使用基于分水嶺變換的數字圖像處理算法分割出避雷器區域,再用模糊神經網絡對分割數據進行訓練分類。分水嶺算法對圖像中噪聲和不均勻光照具有較強的魯棒性,但該方法需要待檢測設備位于圖像中間才能被正確檢測,因此在應用中具有一定的局限性。文獻[7]利用半局部算子提取絕緣子圖像的紋理特征,再將新定義的凸能量函數加入主動輪廓模型,進一步提取出絕緣子輪廓,但該方法計算量大且模型不能自動初始化。這類傳統方法的特征提取過程往往需要人工干預來獲取與目標特征相關的原始圖像信息[9],且通常需要對網絡進行單獨訓練以進行多類目標的定位,因此不能滿足電網快速發展的需求[10]。
近年來,基于深度學習的目標檢測研究已成為電力設備視覺檢測的研究熱點。其中,卷積神經網絡(Convolutional Neural Network, CNN)是深度學習中最重要的模型之一[11]。自從AlexNet網絡[12]在ImageNet圖像庫上實現了巨大突破后,CNN獲得了廣泛的關注[13]。文獻[14]提出了一種新穎的帶級聯結構的深度CNN,解決了絕緣子定位和缺陷檢測的兩級問題。該級聯結構的上級網絡結合了VGG網絡(visual geometry group network)[15]和區域建議網絡來確定絕緣子的區域,能夠快速定位絕緣子的位置。文獻[16]將多尺度特征圖與相對位置特征引入Faster R-CNN[17]模型中,用于檢測變壓器的六類組件,獲得了較高的識別精度。文獻[18]優先考慮目標各部分之間的方向一致性,提出了一種基于任意方向定位的深度卷積神經網絡,用來檢測紅外圖像下四類變電設備的小部件。文獻[19]在LeNet_5[20]模型中引入隨機配置網絡分類器,并添加反饋機制,提高了絕緣子檢測的精度。文獻[21]首次提出了YOLOv3的檢測模型,其單階段的檢測算法在檢測速度和精度上均表現出了很大優勢[22],在不同研究領域得到了推廣和應用[23-26]。
與普通目標的可見光圖像相比,變電站電力設備的紅外圖像存在以下特征:①圖像背景復雜,目標受干擾、遮擋情況較多;②紅外熱圖像可能存在溫度過于集中的部分,導致圖像對比度低;③設備外觀輪廓特征相近,且多為大尺度目標,長寬比偏大。然而,研究發現原始YOLOv3模型存在幾個缺陷:對中等或大尺寸的目標物體檢測效果較差,容易出現誤檢、漏檢或重復檢測[21]的問題;對重疊目標難以區分、對目標位置定位不夠精確等問題[27]。針對以上問題,本研究對YOLOv3的網絡結構進行了兩處改進:在YOLOv3骨干網絡DarkNet53的每個殘差塊中加上跨階段局部模塊(Cross Stage Partial,CSP)[28],CSP模塊能有效提升卷積神經網絡的學習能力,減少計算量,在輕量化的同時進一步提高模型的分類精度;在原模型的特征金字塔網絡(Feature Pyramid Networks,FPN)[29]后加入自底向上的特征融合模塊路徑聚合網絡(Path Aggregation Network,PAN)[30],PAN是對FPN的補充,它能較好地保存淺層特征信息,自底向上傳遞強定位特征。FPN與PAN的組合模塊能從不同的主干層對不同的檢測層進行參數聚合,進一步提高檢測模型的特征提取能力。網絡深度的加深以及結構的復雜化使改進后的模型在檢測速度上相較原模型有所降低。除網絡結構上的改進外,本文還在模型的輸入端增加了馬賽克(Mosaic)技術,以增強模型的訓練效果;CIoU損失函數被用作新模型的定位損失,能讓模型在邊框回歸時取得更好的收斂速度和精度。最后,通過實驗及對比評估進一步論證了提出模型的有效性與優勢。
1 改進YOLOv3的紅外目標檢測模型
本文提出的改進方案從原始YOLOv3模型的輸入端、骨干網絡、頸部和檢測頭四個方面進行優化:輸入端引入Mosaic數據增強處理;在骨干網絡DarkNet53中引入CSP模塊,并將Leaky_ReLU(LReLU)激活函數[31]替換為Mish激活函數[32],新骨干網絡為CSPDarkNet53;在頸部的空間金字塔池化(Spatial Pyramid Pooling,SPP)[33]模塊與FPN后融入PAN結構;檢測頭部分為YOLO_Head模塊,這部分主要通過邊框回歸和非極大值抑制確定目標邊界框的最終位置,原始回歸損失函數方均誤差(Mean Square Error,MSE)被替換為CIoU損失[34]。改進后的模型架構如圖2所示。
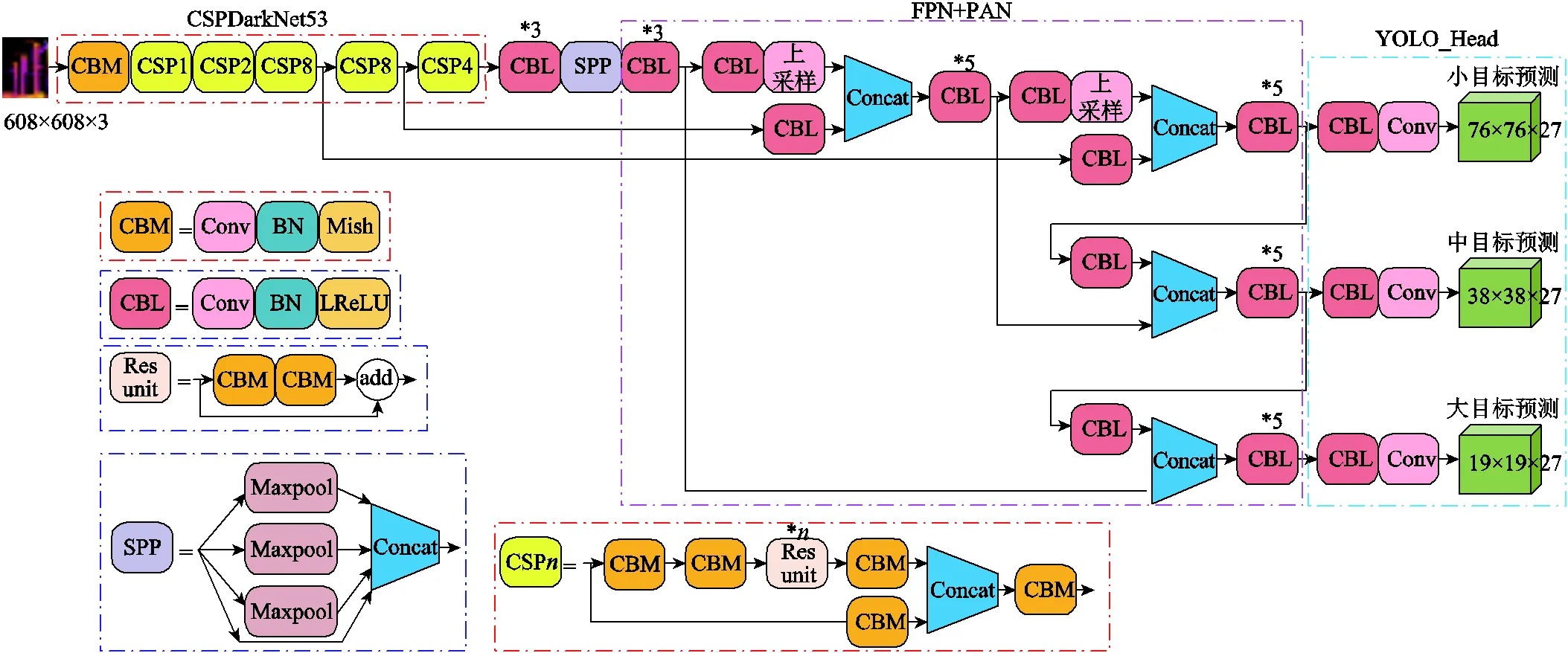
圖2 改進YOLOv3模型的網絡架構
1.1 Mosaic數據增強
新模型在輸入端加入了Mosaic數據增強處理,它是CutMix[35]數據增強方式的改進版。CutMix每次處理兩張圖像,首先將一張圖像的部分區域剪切掉并不填充零像素,然后隨機填充數據集中其他圖像的區域像素值。Mosaic數據增強則是每次讀取四張圖像,通過隨機縮放、裁剪及排布、色域變化中的一種或多種方法把四張圖拼成一張,如圖3所示。然后將拼接好的圖像和調整后的標簽傳入神經網絡學習。
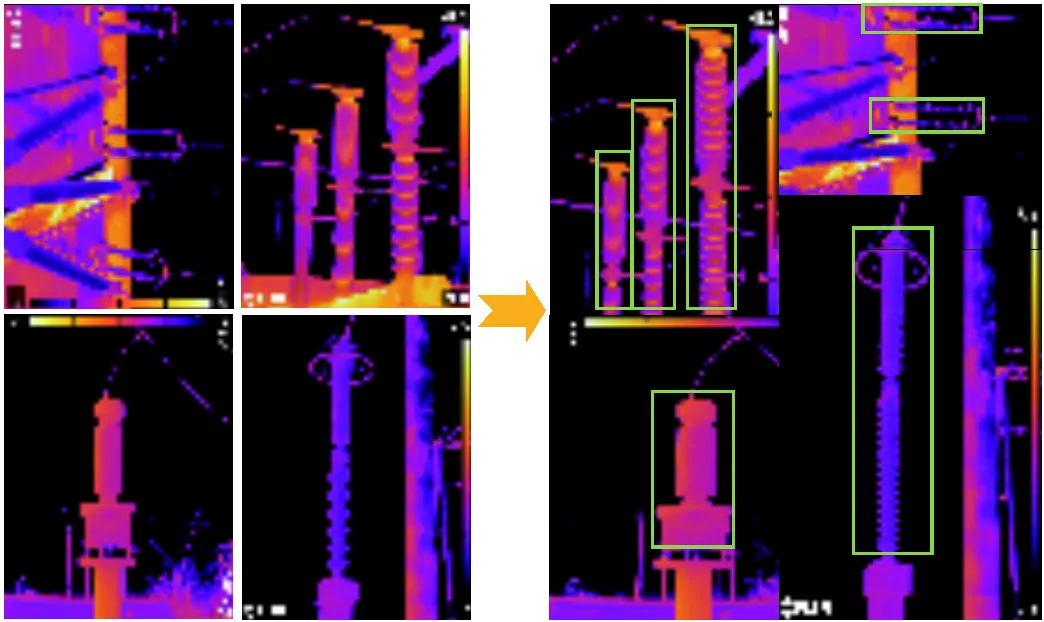
圖3 Mosaic數據增強
輸入端的Mosaic處理,豐富了被檢測目標的背景,增加了數據集的多樣性。特別是隨機縮放進一步增加了不同尺度的目標,增強了網絡的魯棒性。此外,模型一次可以計算四張圖片數據,因而具有更低的訓練門檻,在GPU資源有限的條件下也能獲得較好的結果。
1.2 CSPDarkNet53模塊
1.2.1 CSPNet
CSPDarkNet53是在YOLOv3主干網絡DarkNet53的基礎上,借鑒2019年CSPNet的經驗[28],產生的優化骨干網絡。從圖2可以看出,CSPDarkNet53主要由5個CSP模塊組成。其中,CSP模塊是將DarkNet53的殘差模塊按照CSPNet結構改進所產生的,它由5個卷積模塊和個Res_unit的疊加模塊組成。
文獻[28]指出,神經網絡推理計算量過大的問題是由于網絡優化中的梯度信息重復導致的。而CSPNet就是從網絡結構設計的角度來解決神經網絡在推理過程中需要較大計算量的問題,它將基礎層的特征映射劃分為兩個部分,然后通過跨階段層次結構將它們合并。其實質是將梯度的變化集成到特征圖中,通過分割梯度流,使梯度流通過不同的網絡路徑傳播。因此,帶有CSPNet結構的CSPDarkNet53網絡有三大優點:①增強CNN的學習能力,能夠在網絡輕量化的同時保持準確性;②提升每個計算單元的利用率,降低計算瓶頸;③降低網絡的內存占用。
1.2.2 Mish激活函數
CSPDarkNet53將原骨干網絡的LReLU激活函數替換為Mish函數,如式(1)所示。與LReLU函數相比,Mish函數有助于保持更小的負值,從而穩定網絡的梯度流;其平滑特性能有效地允許信息深入地滲透到神經網絡中,從而獲得更好的準確性和泛化性能。因此,隨著網絡層數的增加,使用Mish函數的網絡表現出了比使用LReLU函數的網絡更高的測試精度,這對于復雜網絡的優化更加有效[36]。

1.3 SPP與FPN+PAN模塊
本文模型的頸部由SPP與FPN+PAN組合模塊構成。SPP用于提升模型的感受野,通過池化特征圖中不同分辨率的特征挖掘出更重要的目標信息。FPN與PAN是兩種特征融合技巧,它們在本文模型中的組合結構如圖4所示。
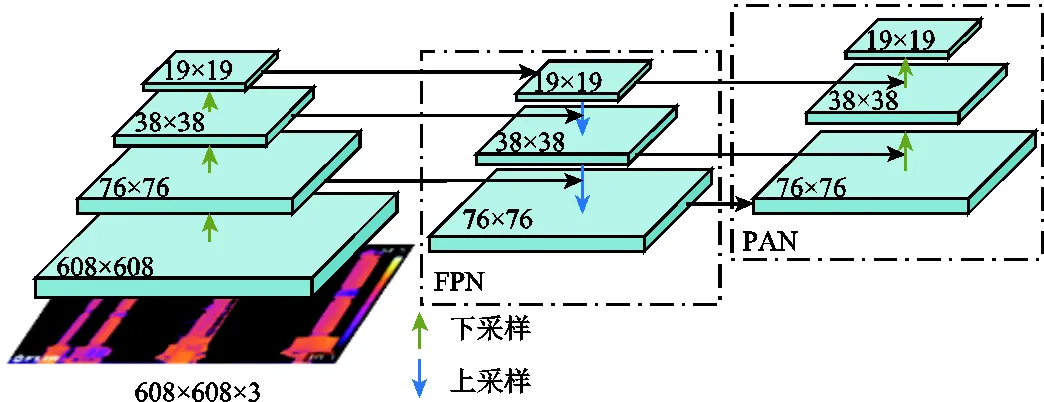
圖4 FPN+PAN特征融合組合
一般地,低層特征圖的語義信息較少,但是目標位置信息豐富;高層特征圖的語義信息比較豐富,而目標位置則比較粗略。原模型的FPN模塊是通過自頂向下的上采樣方式傳遞目標的強語義特征,但是對目標的定位信息傳遞較少。針對原模型的定位問題,新模型在FPN模塊的后面添加一個自底向上的金字塔結構的PAN模塊,該模塊通過改進PANet結構得到。它將低層的強定位特征通過自底向上的下采樣方式傳遞上去,是對FPN模塊的補充優化。FPN與PAN的組合模塊能從不同的主干層對不同的檢測層進行參數聚合,進一步提高了模型的特征提取能力。
1.4 YOLO_Head模塊
本文模型的輸入是尺寸為608×608的電力設備紅外圖像,通過對特征圖進行32、16和8倍下采樣,得到分辨率為19×19、38×38和76×76三種不同尺度的特征圖,它們分別被用于定位大尺度、中尺度和小尺度的設備目標,如圖5所示。YOLO_Head模塊在三個特征圖的每個網格單元上預測三個邊界框,每個預測框均帶有類別、置信度和位置信息,其中包括四個類別變量v(=1, 2, 3, 4),一個置信度變量c和四個位置變量(v,v,v,v),以上變量組成了模型的預測結果。
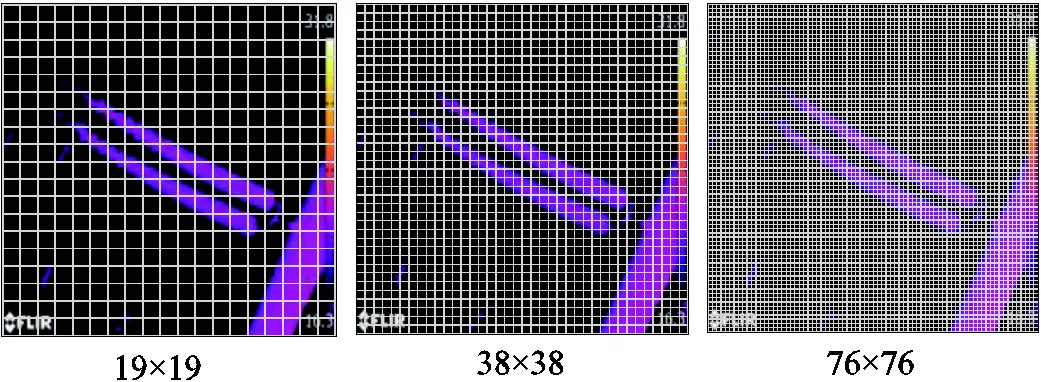
圖5 三種不同尺度的特征圖
利用softmax函數將輸出的類別變量按多類概率分布進行變換,每類電力設備對應的概率計算式為

這里將交叉熵損失函數作為分類損失的目標函數,定義為

式中,為目標的標簽類別是否為預測類別,其值為0或1。
置信度反映了預測框內存在目標的概率,用sigmoid函數進行轉換,有

同樣將交叉熵損失函數作為置信度損失的目標函數,定義為

式中,為預測框中是否存在目標,其值為0或1。
定位損失被用來確定最終的邊界框位置,本文的定位損失定義為

其中
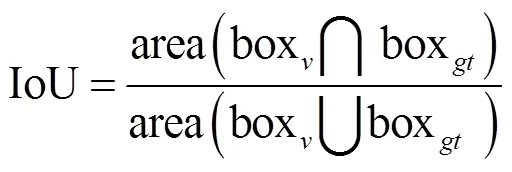
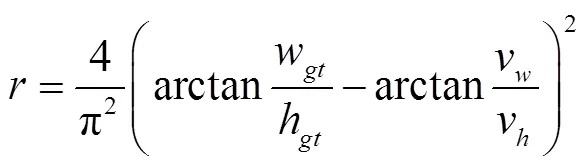
式中,CIoU為邊界框回歸預測的計算方式,預測過程如圖6所示;為預測框中心點與標簽框中心點之間的歐式距離;為預測框與標簽框的最小包圍框的對角線距離;box為預測框;box為標簽框;IoU為兩個框的交集區域面積與并集區域面積的比值;為約束量,能夠控制預測框的長寬盡快地與標簽框的長寬接近,其中,為用于衡量預測框和標簽框兩者長寬比一致性的參數,為平衡長寬比例的權衡參數。CIoU考慮了重疊面積、中心點距離、長寬比三種因素,能讓模型在邊框回歸時取得更好的收斂速度和精度。
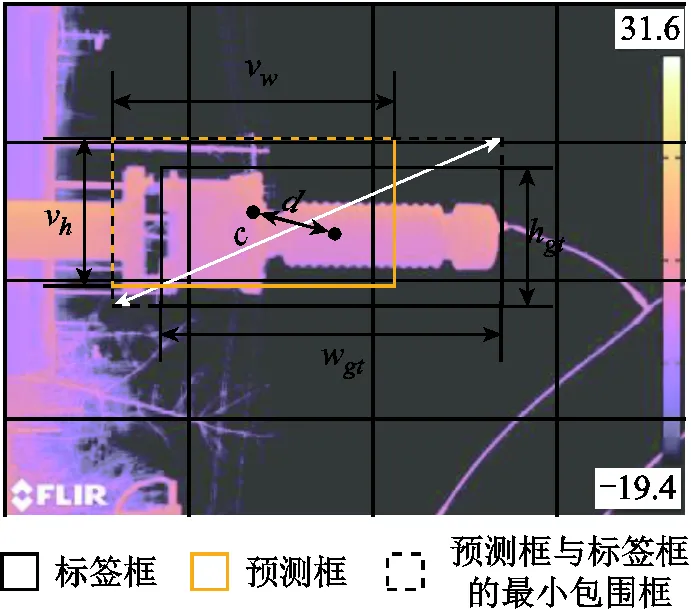
圖6 邊界框回歸預測
2 實驗與結果分析
實驗選取了包含避雷器、互感器、絕緣子、斷路器四類具有相似外觀結構的電力設備紅外數據集。本節將本文模型與Faster R-CNN、SSD[37]和YOLOv3三種主流模型在選取的數據集上進行訓練測試,并進行對比評估。
2.1 實驗說明
本文研究的電力設備紅外原始數據集來自于某電網公司對其轄下變電站設備帶電檢測獲取的數據。由于深度學習需要大量數據樣本對網絡進行訓練[38],因此本研究對原數據集進行了圖像增強和擴充預處理,處理后的數據集共包含4 323張設備圖像,利用LabelImg圖像標注工具共標記出635個避雷器、2 470個互感器、6 084個絕緣子和1 291個斷路器設備。為了較好地評估網絡性能、驗證模型訓練測試的泛化性能,本文將數據集隨機分為比例基本相同的訓練和測試數據,即訓練與測試集分別包括2 162和2 161張圖像。
對實驗數據的訓練與測試均在同一個Ubuntu 16.04操作系統的深度學習服務器上進行,該服務器帶有Intel Xeon W-2145 CPU,兩個GeForce RTX 2080Ti 11-GB GPU和64-GB DDR4 RAM。數據集的訓練和測試均利用DarkNet框架實現,單張圖片的檢測效果通過OpenCV工具庫可視化。
2.2 訓練過程和分析
訓練開始階段利用遷移學習來初始化模型的權重。遷移學習是將一個領域內學習到的知識應用到另一個相似領域的技術[39],它可以提取原始問題數據集和目標數據集之間的潛在特征或共同結構[40],從而加速模型的訓練并提高模型的性能。訓練過程采用批歸一化的方式優化,一個批次訓練64個樣本,每次將1個樣本送入模型進行前向計算。設置模型的初始學習率為1.3×10-3,動量為0.949,權重衰減為0.000 5,共訓練30 000個批次。
圖7為訓練過程中平均損失值(Avg_loss)與平均精度均值(mAP)隨迭代次數(iterations)增加而變化的曲線。其中,mAP曲線是模型每訓練4個epoch(本文即神經網絡迭代136次)計算一次mAP值,共215個mAP值組合得到的。從圖7可以看出,訓練開始后損失值隨著訓練迭代次數的增加而逐漸減小,收斂速度較快,且誤差波動范圍逐漸縮小。當迭代次數達到5 000時,訓練損失下降明顯變慢,迭代20 000次后損失值在1左右波動,并且不再趨于降低,這表明模型達到了較為理想的訓練效果。mAP曲線在訓練迭代5 000次時已經達到較高值,但波動較大,迭代20 000次之后波動范圍變小,并在迭代23 440次時mAP達到最大值0.960 37。因此選取第23 440次迭代的訓練權重作為檢測測試集的最終權重。
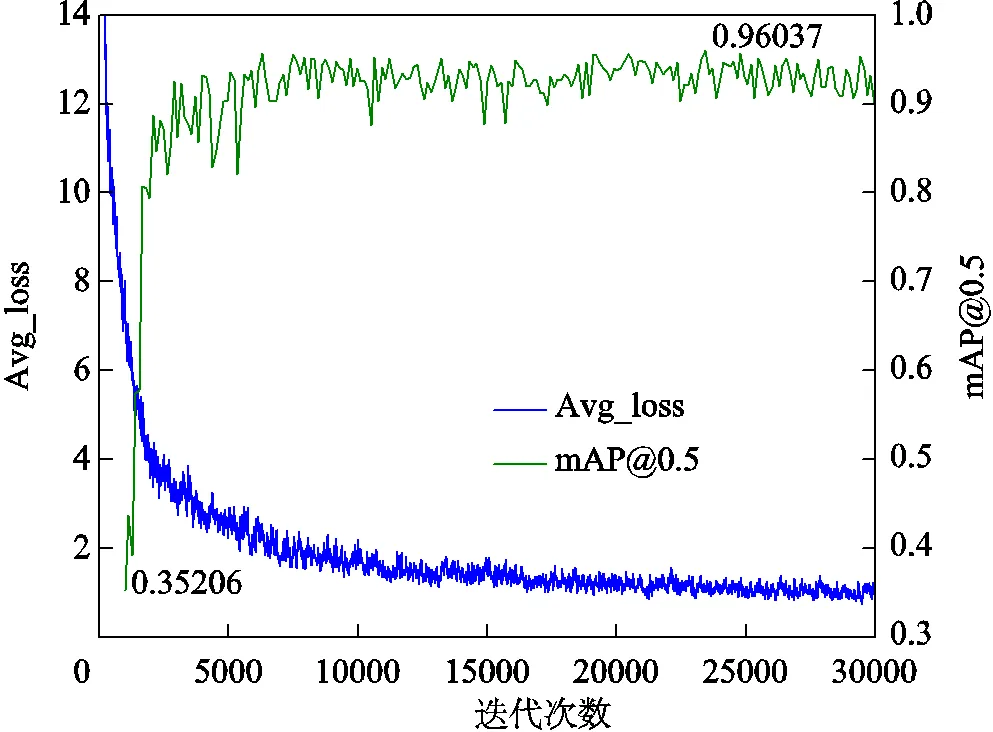
圖7 訓練期間的平均損失曲線和mAP曲線
2.3 性能比較與結果分析
為了驗證本文模型的有效性,本部分將Faster R-CNN、SSD、YOLOv3和本文提出的模型在四類電力設備紅外數據集上進行實驗評估,并討論實驗結果。評估指標包括計算每個類別的平均精度值(AP)、不同檢測閾值(IoU)下的mAP和檢測速度(FPS)。其中,AP是評價單一類別檢測效果的重要指標,可以通過計算準確率與召回率(見式(10))曲線所包圍的面積得到,見式(11)。mAP是模型檢測四類電力設備的平均精度均值,它可以通過計算所有類別AP的平均值得到,定義為
式中,tp即真正例,表示模型正確識別出目標類別的數量;fp即假正例,表示模型將其他類別誤判為目標類別的數量;fn即假反例,表示模型將目標類別誤判為其他類別的數量。
表1給出了四種模型在不同閾值下(IoU=0.5和0.75)測試相同數據集得到的AP、mAP和FPS三個指標的比較結果。其中,本文模型在閾值為0.5和0.75時的mAP值分別為96.04%和89.58%,且檢測速度高達56f/s。將本文模型與其他三種模型的測試結果進行對比,分析如下:在單類別的平均精度方面,本文模型檢測避雷器、斷路器、絕緣子的精度值均高于其他三種方法;在平均精度均值方面,不同閾值下本文模型均比其他模型精度高;在檢測速度方面,由于改進的YOLOv3網絡深度加深,速度略慢于原始YOLOv3模型,但是明顯快于Faster R-CNN和SSD。總體而言,本文提出的模型在檢測精度和速度上均達到了令人滿意的結果。
表1 不同檢測模型的測試結果

Tab.1 Testing results of the different detection models
圖8展示了本文模型在隨機挑選的測試集圖像上的檢測結果,它包括帶標簽框的原始圖像和檢測結果圖。其中避雷器(arrester)、斷路器(breaker)、互感器(transformer)、絕緣子(insulator)的預測結果分別如圖8對應框中所示,邊界框上方的值為模型預測該類別的置信度。可以看出,模型不僅能在特定場景下精確地檢測到目標,而且在目標重疊、背景遮擋、復雜背景環境等情況下(如圖8c、圖8e、圖8f),模型仍能以很高的準確率預測設備類別,并精確地定位到設備所在位置。以上結果表明,在不同場景下,本文所提出的模型在檢測準確度、速度和定位精度方面均表現出較大的優勢,尤其適用于變電站電力設備的紅外目標檢測。
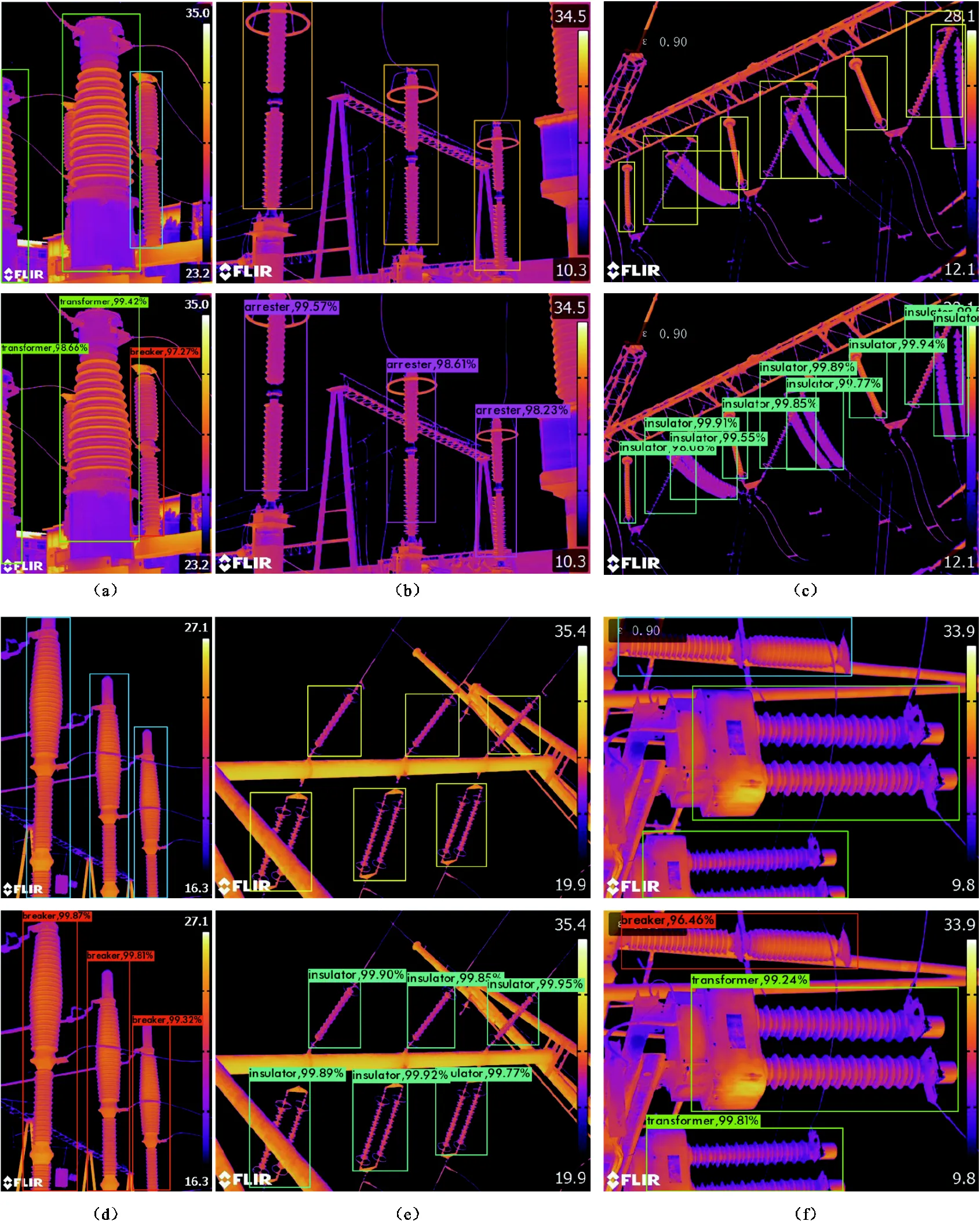
圖8 本文方法在部分圖像上的檢測結果
3 結論
本文提出一種改進YOLOv3的電力設備紅外圖像檢測新模型,主要從原模型的輸入端、骨干網絡、頸部及檢測頭四部分進行改進。改進后的模型針對避雷器、互感器、絕緣子、斷路器四類具有相似外觀結構的電力設備紅外數據集進行對比實驗。結果表明:
1)本文模型檢測四類變電設備的精度均可達92%以上,獲得了較好的紅外目標檢測效果。
2)在IoU閾值為0.5和0.75時,其平均精度均值分別高達96.04%和89.58%,均高于Faster R-CNN、SSD和YOLOv3模型。
3)在同一臺實驗平臺上進行訓練測試,提出模型的檢測速度高達56f/s,略低于原始YOLOv3模型,但明顯高于Faster R-CNN和SSD。本文模型不僅能準確識別電力設備類別,而且能快速精確地定位到設備所在位置,為后續電力設備的帶電狀態評估與診斷奠定了基礎。
[1]Ullah I, Khan R U, Yang Fan, et al. Deep learning image-based defect detection in high voltage electrical equipment[J]. Energies, 2020, 13(2): 392.
[2]馮振新, 周東國, 江翼, 等. 基于改進 MSER 算法的電力設備紅外故障區域提取方法[J]. 電力系統保護與控制, 2019, 47(5): 123-128. Feng Zhenxin, Zhou Dongguo, Jiang Yi, et al. Fault region extraction using improved MSER algorithm with application to the electrical system[J]. Power System Protection and Control, 2019, 47(5): 123-128.
[3]Jadin M S, Taib S. Recent progress in diagnosing the reliability of electrical equipment by using infrared thermography[J]. Infrared Physics & Technology, 2012, 55(4): 236-245.
[4]Jadin M S, Taib S, Ghazali K H. Finding region of interest in the infrared image of electrical installation[J]. Infrared Physics & Technology, 2015, 71: 329-338.
[5]Zhao Zhenbing, Xu Guozhi, Qi Yincheng. Representation of binary feature pooling for detection of insulator strings in infrared images[J]. IEEE Transactions on Dielectrics and Electrical Insulation, 2016, 23(5): 2858-2866.
[6]Almeida C A L, Braga A P, Nascimento S, et al. Intelligent thermographic diagnostic applied to surge arresters: a new approach[J]. IEEE Transactions on Power Delivery, 2009, 24(2): 751-757.
[7]Wu Qinggang, An Jubai. An active contour model based on texture distribution for extracting inhomogeneous insulators from aerial images[J]. IEEE Transactions on Geoscience and Remote Sensing, 2013, 52(6): 3613-3626.
[8]朱邵成, 高清維, 盧一相, 等. 基于頻率調諧的絕緣子識別與定位[J]. 電工技術學報, 2018, 33(23): 5573-5580. Zhu Shaocheng, Gao Qingwei, Lu Yixiang, et al. Identification and location of insulator string based on frequency-tuned[J]. Transactions of China Electrotechnical Society, 2018, 33(23): 5573-5580.
[9]Wang Zhujun, Yang Lijian, Gao Songwei. Pipeline magnetic flux leakage image detection algorithm based on multiscale SSD network[J]. IEEE Transactions on Industrial Informatics, 2020, 16(1): 501-509.
[10]Zhong Junping, Liu Zhigang, Han Zhiwei, et al. A CNN-based defect inspection method for catenary split pins in high-speed railway[J]. IEEE Transactions on Instrumentation and Measurement, 2019, 68(8): 2849-2860.
[11]孫曙光, 李勤, 杜太行, 等. 基于一維卷積神經網絡的低壓萬能式斷路器附件故障診斷[J]. 電工技術學報, 2020, 35(12): 2562-2573. Sun Shuguang, Li Qin, Du Taihang, et al. Fault diagnosis of accessories for the low voltage conventional circuit breaker based on one-dimensional convolutional neural network[J]. Transactions of China Electrotechnical Society, 2020, 35(12): 2562-2573.
[12]Krizhevsky A, Sutskever I, Hinton G. ImageNet classification with deep convolutional neuralnetworks[C]//NIPS'12 Proceedings of the 25th International Conference on Neural Information Processing Systems, LakeTahoe, USA, 2012: 1097-1105.
[13]李超然, 肖飛, 樊亞翔, 等. 基于卷積神經網絡的鋰離子電池SOH估算[J]. 電工技術學報, 2020, 35(19): 4106-4119. Li Chaoran, Xiao Fei, Fan Yaxiang, et al. An approach to lithium-ion battery SOH estimation based on convolutional neural network[J]. Transactions of China Electrotechnical Society, 2020, 35(19): 4106-4119.
[14]Tao Xian, Zhang Dapeng, Wang Zihao, et al. Detection of power line insulator defects using aerial images analyzed with convolutional neural networks[J]. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2020, 50(4): 1486-1498.
[15]Simonyan K, Zisserman A. Very deep convolutional networks for large-scale image recognition[J/OL]. [2015-04-10]. https://arxiv.org/abs/1409.1556.
[16]Liu Ziquan, Wang Huifang. Automatic detection of transformer components in inspection images based on improved faster R-CNN[J]. Energies, 2018, 11(12): 3496.
[17]Ren Shaoqing, He Kaiming, Girshick R, et al. Faster R-CNN: towards real-time object detection with region proposal networks[C]//Advances in Neural Information Processing Systems, Montreal, Canada, 2015: 91-99.
[18]Gong Xiaojin, Yao Qi, Wang Mengling, et al. A deep learning approach for oriented electrical equipment detection in thermal images[J]. IEEE Access, 2018, 6: 41590-41597.
[19]張倩, 王建平, 李帷韜. 基于反饋機制的卷積神經網絡絕緣子狀態檢測方法[J]. 電工技術學報, 2019, 34(16): 3311-3321. Zhang Qian, Wang Jianping, Li Weitao. Insulator state detection of convolutional neural networks based on feedback mechanism[J]. Transactions of China Electrotechnical Society, 2019, 34(16): 3311-3321.
[20]LeCun Y, Bottou L, Bengio Y, et al. Gradient-based learning applied to document recognition[J]. Proceedings of the IEEE, 1998, 86(11): 2278-2324.
[21]Redmon J, Farhadi A. YOLOv3: An incremental improvement[J/OL]. [2018-04-8]. https://arxiv.org/ abs/1804.02767.
[22]Liu Yunpeng, Ji Xinxin, Pei Shaotong, et al. Research on automatic location and recognition of insulators in substation based on YOLOv3[J]. High Voltage, 2020, 5(1): 62-68.
[23]Choi J, Chun D, Kim H, et al. Gaussian YOLOV3: an accurate and fast object detector using localization uncertainty for autonomous driving[C]//IEEE International Conference on Computer Vision, Seoul, South Korea, 2019: 502-511.
[24]Bochkovskiy A, Wang C Y, Liao H Y M. YOLOv4: optimal speed and accuracy of object detection[J/OL]. arXiv preprint arXiv:2004.10934.
[25]Zhao Liquan, Li Shuaiyang. Object detection algorithm based on improved YOLOv3[J]. Electronics, 2020, 9(3): 537.
[26]Tian Yunong, Yang Guodong, Wang Zhe, et al. Apple detection during different growth stages in orchards using the improved YOLO-V3 model[J]. Computers and Electronics in Agriculture, 2019, 157: 417-426.
[27]徐誠極, 王曉峰, 楊亞東. Attention-YOLO: 引入注意力機制的YOLO檢測算法[J]. 計算機工程與應用, 2019, 55(6): 13-23. Xu Chengji, Wang Xiaofeng, Yang Yadong. Attention-YOLO: YOLO detection algorithm that introduces attention mechanism[J]. Computer Engineering and Applications, 2019, 55(6): 13-23.
[28]Wang C Y, Mark Liao H Y, Wu Y H, et al. CSPNet: a new backbone that can enhance learning capability of CNN[C]//IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops, Seattle, USA, 2020: 390-391.
[29]Lin T Y, Dollár P, Girshick R, et al. Feature pyramid networks for object detection[C]//IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, USA, 2017: 2117-2125.
[30]Liu Shu, Qi Lu, Qin Haifang, et al. Path aggregation network for instance segmentation[C]//IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, USA, 2018: 8759-8768.
[31]Maas A L, Hannun A Y, Ng A Y. Rectifier nonlinearities improve neural network acoustic models[C]//Proc. ICML, Atlanta, USA, 2013, 30(1): 3.
[32]Misra D. Mish: a self regularized non-monotonic neural activation function[J/OL]. https://arxiv.org/abs/ 1908.08681, 2019.
[33]He Kaimng, Zhang Xiangyu, Ren Shaoqing, et al. Spatial pyramid pooling in deep convolutional networks for visual recognition[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2015, 37(9): 1904-1916.
[34]Zheng Zhaohui, Wang Ping, Liu Wei, et al. Distance-IoU loss: faster and better learning for bounding box regression[C]//AAAI Conference on Artificial Intelligence, New York, USA, 2020: 12993-13000.
[35]Yun Sangdoo, Han Dongyoon, ChunSanghyuk, et al. Cutmix: regularization strategy to train strong classifiers with localizable features[C]//IEEE/CVF International Conference on Computer Vision, Seoul, South Korea, 2019: 6023-6032.
[36]Zhu Qinfeng, Zheng Huifeng, Wang Yuebing, et al. Study on the evaluation method of sound phase cloud maps based on an improved YOLOv4 algorithm[J]. Sensors, 2020, 20(15): 4314.
[37]Liu Wei, Anguelov D, Erhan D, et al. SSD: Single shot multibox detector[C]//European Conference on Computer Vision, Amsterdam, Netherlands, 2016: 21-37.
[38]李垣江, 張周磊, 李夢含, 等. 采用深度學習的永磁同步電機匝間短路故障診斷方法[J]. 電機與控制學報, 2020, 24(9): 173-180. Li Yuanjiang, Zhang Zhoulei, Li Menghan, et al. Fault diagnosis of inter-turn short circuit of permanent magnet synchronous motor based on deep learning[J]. Electric Machines and Control, 2020, 24(9): 173-180.
[39]陳劍, 杜文娟, 王海風. 采用深度遷移學習定位含直驅風機次同步振蕩源機組的方法[J]. 電工技術學報, 2021, 36(1): 179-190. Chen Jian, Du Wenyjuan, Wang Haifeng. A method of locating the power system subsynchronous oscillation source unit with grid-connected PMSG using deep transfer learning[J]. Transactions of China Electrote-chnical Society, 2021, 36(1): 179-190.
[40]Wen Long, Gao Liang, Li Xinyu. A new deep transfer learning based on sparse auto-encoder for fault diagnosis[J]. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2019, 49(1): 136-144.
Infrared Object Detection Model for Power Equipment Based on Improved YOLOv3
Zheng Hanbo Li Jinheng Liu Yang Cui Yaohui Ping Yuan
(School of Electrical Engineering Guangxi University Nanning 530004 China)
Infrared image detection technology is widely used in monitoring and diagnosing electrical equipment considering its non-contact and fast advantages. It is generally believed that fast and accurate localization of the equipment is the prerequisite for automatic detection and diagnosis. Compared with visible light images of ordinary objects, the infrared images of power equipment have characteristics of complex background, low contrast, similar object features, and large aspect ratio. Besides, the original YOLOv3 model is difficult to accurately locate the objects of power equipment. In view of the above problems, an improved YOLOv3 model was proposed in this paper: cross stage partial module was introduced into the backbone network; the path aggregation network was integrated into the feature pyramid structure of the original model; in addition, this study also added Mosaic data enhancement technology and CIoU loss function. The improved model was trained and tested on four types of infrared image data sets of power equipment with similar corrugated appearance structures, which showed that the detection accuracy of each type can reach more than 92%. Finally, the results were compared and evaluated with the other three mainstream object detection models. The results show that the mean average precisions of the improved model proposed in this paper were better than Faster R-CNN, SSD and YOLOv3. Although the detection speed of the improved YOLOv3 model is sacrificed compared to the original YOLOv3 model, it is significantly higher than the other two models, further verifying the effectiveness of the proposed model in this paper.
Power equipment detection, YOLOv3, convolutional neural network, infrared image
TM85
10.19595/j.cnki.1000-6753.tces.201324
國家自然科學基金(51907034)和廣西科技基地和人才專項科技項目(2020AC19010)資助。
2020-09-28
2020-12-14
鄭含博 男,1984年生,副教授,研究方向為電氣設備智能檢測與診斷、電工絕緣新材料、智能配電網及新能源應用。E-mail:hanbozheng@163.com(通信作者)
李金恒 男,1996年生,碩士研究生,研究方向為電氣設備的智能檢測。E-mail:lijinheng2018@163.com
(編輯 郭麗軍)
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
江蘇安全生產(2020年7期)2020-09-04 09:34:58
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當代陜西(2019年10期)2019-06-03 10:12:04
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
現代工業經濟和信息化(2016年22期)2016-08-23 11:55:50
海峽科技與產業(2016年3期)2016-05-17 04:32:12
電測與儀表(2016年18期)2016-04-11 11:29:34