計(jì)及道路阻斷的智能消防機(jī)器人路徑規(guī)劃策略
2021-04-12 08:30:37何光層桑文君
科技風(fēng) 2021年6期
何光層 桑文君


摘 要:合理的運(yùn)行路徑規(guī)劃對(duì)保障智能消防機(jī)器人的可靠運(yùn)行意義重大。針對(duì)消防機(jī)器人路徑規(guī)劃問題,文章在對(duì)A-Star算法原理及動(dòng)作過程進(jìn)行深入分析的基礎(chǔ)上,建立了適用于智能消防機(jī)器人的路徑規(guī)劃模型。之后,考慮到火災(zāi)現(xiàn)場(chǎng)存在的道路阻斷問題,文章基于貪婪思想,提出了一種智能消防機(jī)器人路徑修正策略。仿真結(jié)果表明,所提智能消防機(jī)器人路徑規(guī)劃與修正方案能夠較好地解決火災(zāi)現(xiàn)場(chǎng)存在的道路阻斷問題,有效提升消防機(jī)器人路徑規(guī)劃的合理性與可靠性。
關(guān)鍵詞:智能消防機(jī)器人;道路阻斷;路徑規(guī)劃與修正;貪婪思想
智能消防機(jī)器人的快速就位對(duì)降低火災(zāi)損失,最大限度保障工作人員安全意義重大。為最大限度減小消防機(jī)器人移動(dòng)時(shí)間,需要在對(duì)相關(guān)信息進(jìn)行合理收集的基礎(chǔ)上,針對(duì)消防機(jī)器人的移動(dòng)路徑進(jìn)行合理規(guī)劃[1]。
蔣新松[2]將路徑規(guī)劃定義為:路徑規(guī)劃是自主移動(dòng)機(jī)器人的重要組成部分,并根據(jù)一些評(píng)估標(biāo)準(zhǔn),在障礙物環(huán)境中找到了從原始狀態(tài)到目標(biāo)狀態(tài)的無碰撞路徑。基于環(huán)境模型的路徑規(guī)劃方法,可以在完全已知的環(huán)境下實(shí)現(xiàn)路徑規(guī)劃,具體包括:迪杰斯特拉算法、A-Star算法、可視化圖方法和拓?fù)浞椒ǖ萚3]。
火場(chǎng)形式瞬息萬變,受火勢(shì)蔓延等因素影響,區(qū)域的障礙物分布情況將發(fā)生變化,進(jìn)而影響區(qū)域內(nèi)部路徑的可通過性,最終導(dǎo)致消防機(jī)器人原始運(yùn)行路徑不再適用。考慮到當(dāng)外部環(huán)境發(fā)生變化后(道路阻斷出現(xiàn)),現(xiàn)有路徑規(guī)劃方案方法存在的效果不佳問題,有必要針對(duì)火災(zāi)現(xiàn)場(chǎng)的消防機(jī)器人路徑規(guī)劃策略開展進(jìn)一步研究工作。
本文在針對(duì)智能消防機(jī)器人路徑規(guī)劃算法開展深入研究的基礎(chǔ)上,選取A-Star算法作為路徑規(guī)劃算法,在針對(duì)火場(chǎng)存在的道路阻斷問題給予充分考慮的基礎(chǔ)上,基于貪婪思想提出了一種使用于智能消防機(jī)器人的路徑重規(guī)劃策略,以保障消防機(jī)器人路徑規(guī)劃的可行性。
1 智能消防機(jī)器人路徑規(guī)劃
合理的路徑規(guī)劃策略有助于智能消防機(jī)器人快速抵達(dá)起火點(diǎn),進(jìn)而有效提升消防機(jī)器人滅火可靠性。A-Star算法作為一種啟發(fā)式算法,因在靜態(tài)環(huán)境具備極高的搜索效率在最短路徑規(guī)劃領(lǐng)域收獲了廣泛關(guān)注[4]。A-Star算法最短路徑計(jì)算流程如下:
(1)基于機(jī)器人所處空間環(huán)境信息,建立外部空間柵格地圖及對(duì)應(yīng)空間坐標(biāo)系,創(chuàng)建open list和close list;
(2)根據(jù)消防機(jī)器人所處空間位置,確定機(jī)器人初始運(yùn)行點(diǎn)作為搜索起點(diǎn)并加入open list中,通過與控制中心之間的信息交流,確定消防機(jī)器人路徑規(guī)劃終點(diǎn)。之后,重復(fù)如下過程:
①根據(jù)式(1)計(jì)算各拓展節(jié)點(diǎn)與目標(biāo)節(jié)點(diǎn)之間的距離代價(jià)f(n),遍歷open list,比較各拓展節(jié)點(diǎn)的距離代價(jià)值,選擇f(n)值最小的節(jié)點(diǎn)加入close list中;
式中g(shù)(n)表示起點(diǎn)前往當(dāng)前節(jié)點(diǎn)的移動(dòng)代價(jià),h(n)對(duì)應(yīng)當(dāng)前節(jié)點(diǎn)前往終點(diǎn)的估算成本。
②基于如圖1所示的八向搜索方法搜索該節(jié)點(diǎn)的8個(gè)相鄰方格。如果不可抵達(dá)或在close list中并忽略它,否則執(zhí)行如下步驟:a.如果它不在open list中,把它加入open list,把起點(diǎn)置為其父節(jié)點(diǎn),記錄該方格的f,g及h值。b.如果它位于open list中,則將g值作為判斷標(biāo)準(zhǔn),與原路徑進(jìn)行比較。若當(dāng)前路徑優(yōu)于原始路徑,則更新其父節(jié)點(diǎn)及g、f值。
(3)更新搜索起點(diǎn),重新開始上述循環(huán)過程,直至終點(diǎn)加入open list或open list為空。
2 基于貪婪思想路徑修正策略
貪婪算法是指在對(duì)問題進(jìn)行求解時(shí),不從整體上加以考慮,只根據(jù)當(dāng)前狀況選擇對(duì)應(yīng)的最優(yōu)動(dòng)作策略[5]。通過A-Star算法確定起點(diǎn)與終點(diǎn)之間的最短路徑之后,消防機(jī)器人的移動(dòng)軌跡也隨之確定,只有在機(jī)器人通過相關(guān)感應(yīng)設(shè)備實(shí)際探測(cè)到障礙物時(shí),才考慮對(duì)機(jī)器人的移動(dòng)路徑進(jìn)行重規(guī)劃。
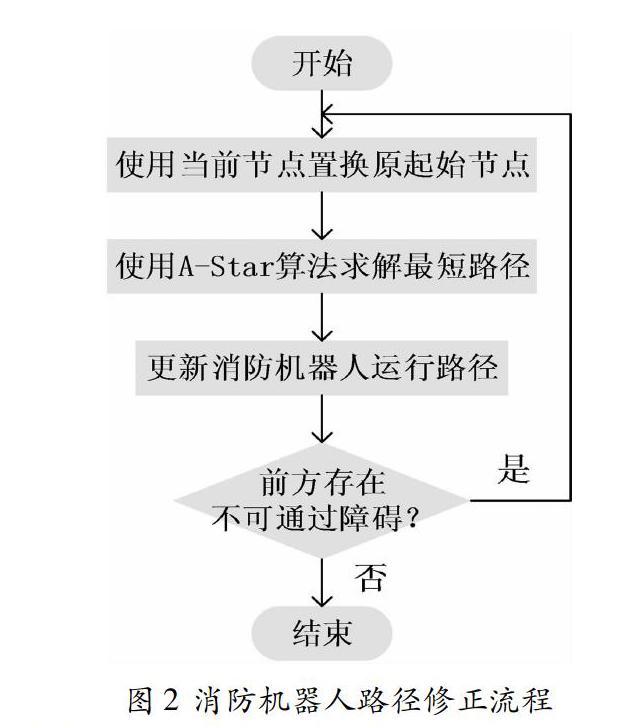
為最大限度降低機(jī)器人實(shí)際運(yùn)行路徑長(zhǎng)度,本文基于貪婪思想,在機(jī)器人規(guī)劃運(yùn)行路徑出現(xiàn)障礙物時(shí),通過修正空間柵格地圖,并更新路徑規(guī)劃起點(diǎn)的方式,針對(duì)機(jī)器人實(shí)際運(yùn)行路徑開展重規(guī)劃工作,具體流程如圖2所示。
為簡(jiǎn)化模型求解過程,本文假設(shè)當(dāng)機(jī)器人運(yùn)行前進(jìn)方向與障礙物延伸方向相垂直時(shí),消防機(jī)器人能夠針對(duì)障礙物進(jìn)行可靠監(jiān)測(cè),并據(jù)此確定其后續(xù)運(yùn)行軌跡。
3 仿真結(jié)果
文章建立了30×30的虛擬柵格地圖模型,并開展了相應(yīng)的仿真分析工作,旨在檢驗(yàn)所提路徑規(guī)劃與修正模型的有效性。A-Star算法搜索過程中的距離代價(jià)使用歐幾里得距離進(jìn)行描述。
假定正常情況下機(jī)房?jī)?nèi)部障礙物不會(huì)發(fā)生移動(dòng),機(jī)器人初始運(yùn)行點(diǎn)坐標(biāo)為(2,4),終點(diǎn)位于(28,25),此時(shí)通過A-Star算法求得的智能消防機(jī)器人路徑規(guī)劃結(jié)果如圖3。可見,A-Star算法能夠在存在障礙物的情況下,有效根據(jù)原始節(jié)點(diǎn)信息,確定消防機(jī)器人運(yùn)行過程中起點(diǎn)與終點(diǎn)之間的最優(yōu)路徑。
基于貪婪思想的消防機(jī)器人路徑修正結(jié)果列示于圖4中。
如圖所示,當(dāng)由于火場(chǎng)情況變化導(dǎo)致圖中灰色區(qū)域不滿足通行條件時(shí),消防機(jī)器人將在抵達(dá)深藍(lán)色方格位置(21,22)時(shí)偵測(cè)到道路阻斷信息,并通過在柵格地圖上添加障礙物的方式針對(duì)場(chǎng)景地圖開展修正工作。在此基礎(chǔ)上,機(jī)器人通過調(diào)節(jié)A-Star算法路徑搜尋起始點(diǎn)的方式,重新規(guī)劃運(yùn)行路徑,以最大限度減少機(jī)器人運(yùn)行里程。
4 結(jié)語
本文在對(duì)機(jī)器人路徑規(guī)劃算法原理開展深入研究的基礎(chǔ)上,基于A-Star算法思想,建立了適用于智能消防機(jī)器人的路徑規(guī)劃模型。考慮到火災(zāi)現(xiàn)場(chǎng)存在的路徑阻斷問題,提出了一種基于貪婪思想的智能消防機(jī)器人的運(yùn)行路徑修正策略,通過對(duì)機(jī)器人運(yùn)行路徑進(jìn)行平滑處理,以及運(yùn)行路徑重規(guī)劃方式,旨在提升消防機(jī)器人的路徑規(guī)劃合理性與運(yùn)行可靠性。分析表明,所提方案能夠有效規(guī)劃?rùn)C(jī)器人運(yùn)行路徑,在引入三次樣條插值平滑處理手段后,機(jī)器人運(yùn)行路徑的可行性得到了進(jìn)一步提高。不可通過情況發(fā)生后,機(jī)器人可通過所提路徑重規(guī)劃方案及時(shí)修正路徑,在充分保障路徑可行性的前提下,最大限度減少機(jī)器人運(yùn)行里程,提升火災(zāi)現(xiàn)場(chǎng)智能消防機(jī)器人的運(yùn)行可靠性。
參考文獻(xiàn):
[1]楊旭,王銳,張濤.面向無人機(jī)集群路徑規(guī)劃的智能優(yōu)化算法綜述[J].控制理論與應(yīng)用,1-12.
[2]Zhang Handong,Zheng Rui,Cen Yuwan.Present Situation and Future Development of Mobile Robot Path Planning Technology[J].Journal of System Simulation,2005,16(2):439-443.
[3]蔣新松.機(jī)器人學(xué)導(dǎo)論[M].遼寧科學(xué)技術(shù)出版社,1994.
[4]付麗霞,任玉潔,張勇,毛劍琳.基于改進(jìn)平滑A-Star算法的移動(dòng)機(jī)器人路徑規(guī)劃[J].計(jì)算機(jī)仿真,2020,37(8):271-276.
[5]白志亮,陳世利,賈樂成,曾周末.基于貪婪算法的汽輪機(jī)葉輪相控陣信號(hào)壓縮感知[J].機(jī)械工程學(xué)報(bào),2018,54(18):33-41.
作者簡(jiǎn)介:何光層(1984— ),男,漢族,陜西旬陽人,本科,高級(jí)工程師,研究方向:電力技術(shù)、設(shè)備管理等方面的研究;桑文君(1983— ),女,漢族,云南保山人,大專,助理工程師,研究方向:信息管理工作。