限界侵限檢測方法研究與應用
2021-04-12 08:24:56趙鑫欣孫淑杰王凡劉俊博杜馨瑜程雨
鐵道建筑 2021年3期
關鍵詞:檢測
趙鑫欣 孫淑杰 王凡 劉俊博 杜馨瑜 程雨
(中國鐵道科學研究院集團有限公司基礎設施檢測研究所,北京 100081)
隨著高速鐵路的修建與運營,鐵路線路設施不斷改進更新,一些高站臺的改造、修建及隧道的整修等施工中出現了不符合標準軌距鐵路建筑限界規范的情況,極大地影響了行車安全。為了確保列車安全運營,安裝在車載平臺的限界檢測系統成為評估鐵路運輸安全和運營維護的重要手段和指標,其檢測結果可以直接反映線路及周邊建筑物的狀態信息,為線路維修和運營提供科學依據。
基于激光掃描測量原理的車載非接觸式限界檢測系統[1-5],容易受外部檢測環境的影響,致使限界檢測分析輸出較多侵限檢測誤報,需要進行大量人工復核工作。因此,須要對線路限界狀態進行自動化和智能化動態檢測。本文提出一種基于聚類分析和圖像處理技術的限界檢測智能分析方法。
1 線路限界檢測系統原理
線路限界檢測系統由數據采集子系統、數據分析子系統和數據管理子系統構成,如圖1 所示。線路限界檢測系統以激光掃描測量技術為基礎,在車頭位置安裝高精度激光傳感器。當檢測車高速運行時,實時獲取鐵路建筑限界及周邊建筑物的空間位置信息。首先基于鋼軌表面的基準坐標系建立二維建筑物斷面輪廓,然后通過圖像處理算法實現建筑物侵限狀態的聚類分析,同時設計多斷面分析模型,實現鐵路建筑限界的快速自動侵限檢測。
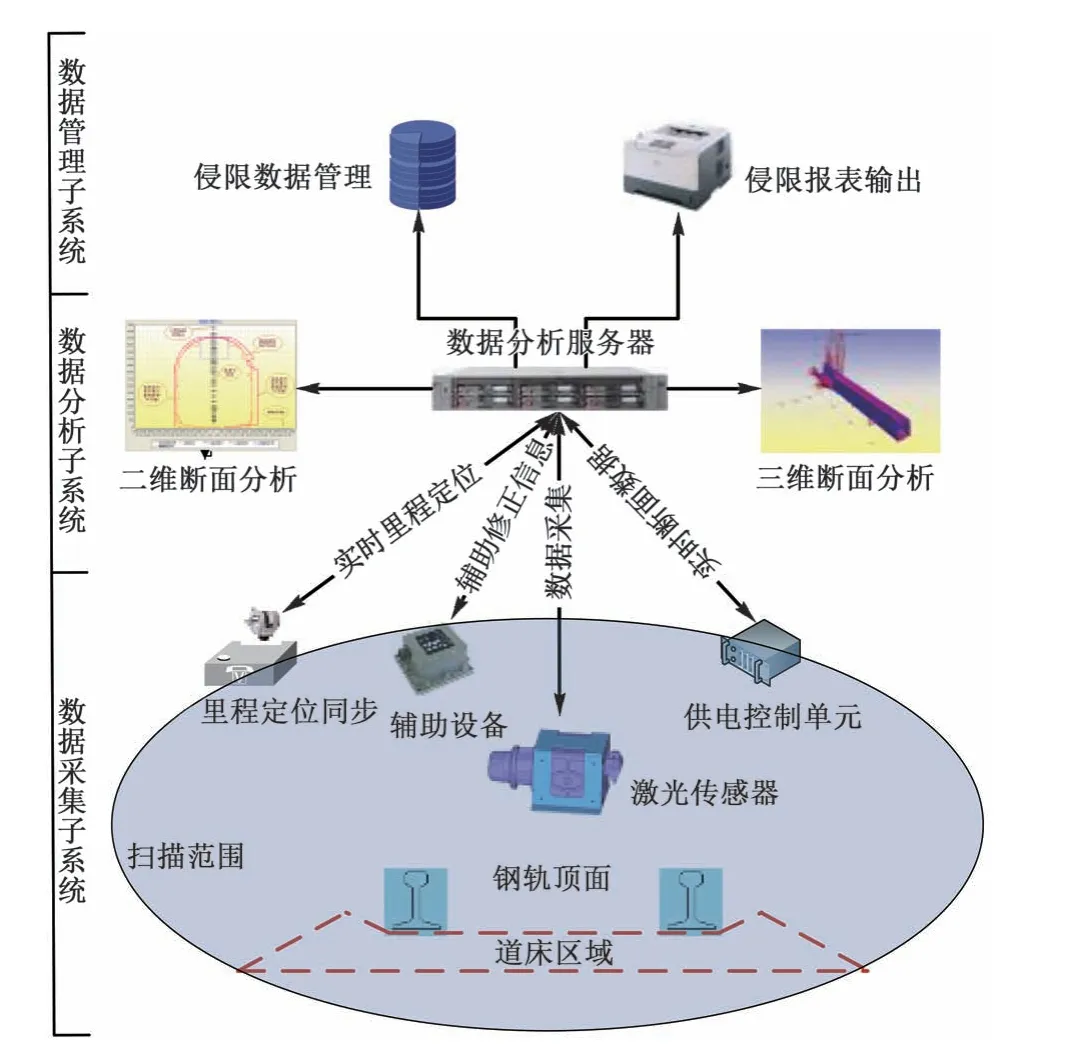
圖1 線路限界檢測系統結構
數據采集子系統完成高速運行檢測下的鐵路建筑限界及周邊建筑物斷面輪廓數據實時采集與存儲。由于每個輪廓斷面數據規模較大,設計基于多緩沖機制的大規模數據實時處理算法,同步檢測速度、里程等信息,通過數據采集卡和異步傳輸模塊可以實時顯示建筑限界輪廓,如圖2所示。其中,綠色表示非侵限數據,紅色表示侵限數據,藍色表示限界侵限標準輪廓。
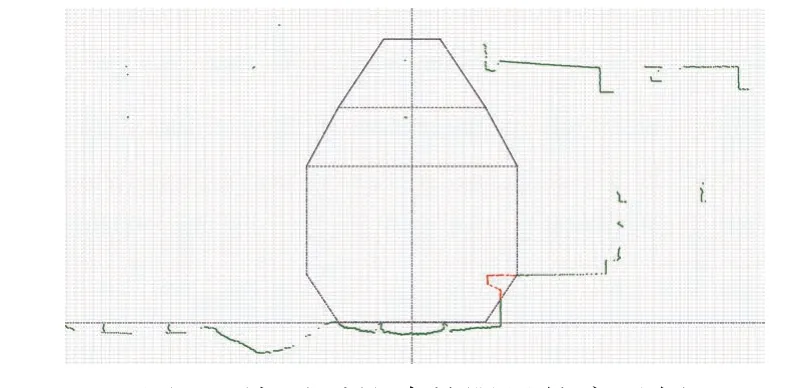
圖2 檢測到的建筑限界輪廓示例
數據分析子系統主要實現斷面輪廓數據分析與侵限檢測。首先根據軌面、車體和傳感器坐標轉換模型完成數據預處理;然后基于聚類分析與圖像處理技術提取斷面中所有輪廓特征;最后通過侵限判別算法自動輸出建筑物侵限、斷面輪廓和綜合最小建筑限界結果,基于三維點云建模技術生成三維立體圖(圖3),能夠展示線路周邊建筑物的三維輪廓。
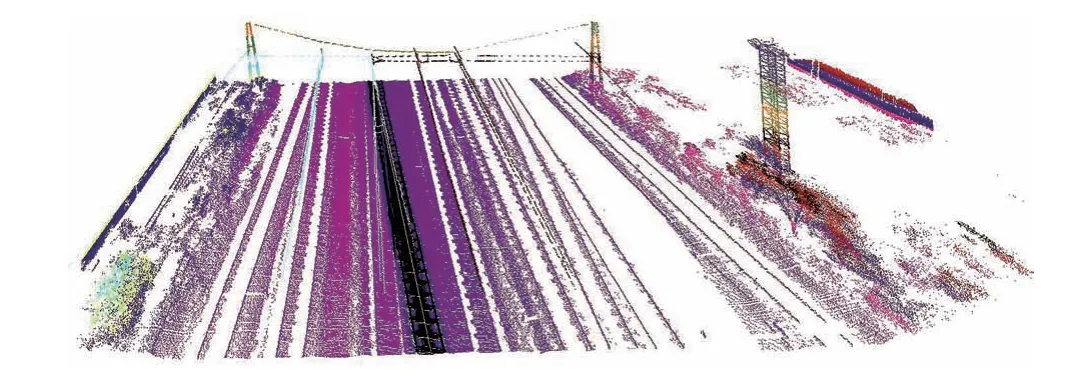
圖3 三維斷面輪廓示例
數據管理子系統實現限界數據編輯和侵限報表輸出,建立限界數據管理機制,可以指導檢測人員根據侵限結果進行現場養護維修。
2 侵限檢測方法
現有侵限檢測方法主要有橫斷面法、軌跡法和綜合斷面法。橫斷面法是一種人工定位測量斷面法;軌跡法根據捕捉測量點的運動軌跡進行測距;綜合斷面法是檢測過程中的一種定高測量法。上述檢測方法只適用于低速檢測,甚至需要人工參與檢測。隨著激光掃描技術和圖像處理技術的發展,基于傳感器采集的建筑物斷面輪廓數據,利用點云聚類分析與圖像處理判別技術完成侵限自動檢測,可以大幅提高檢測效率,目前已在線路檢測維護中得到廣泛應用。
限界檢測系統采集到的原始數據為點云數據。根據TB/T 3308—2013《鐵路建筑實際限界測量和數據格式》[6],以軌面為測量基準時,在垂直于線路中心線的斷面內測量建筑物和設備的內輪廓點(最近點、最高點、最低點三者其一)距兩軌頂連線的垂直高度及距垂直平分兩軌連線的直線距離,動態測量偏差不大于40 mm,檢測橫斷面間隔不大于0.5 m。
根據檢測車測量允許偏差要求,本文提出一種基于聚類分析和圖像處理算法的侵限檢測方法,包含聚類算法模塊和侵限干擾過濾算法模塊。本文算法流程如圖4所示。
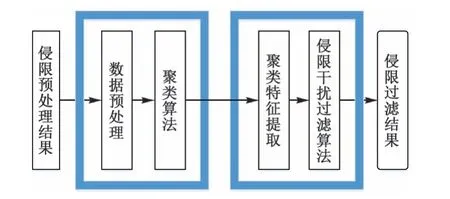
圖4 基于聚類分析和圖像處理算法的侵限檢測流程
2.1 聚類分析算法
聚類分析算法[7-9]是一種非監督學習算法,作為常用的數據分析算法應用于很多領域。利用聚類分析,通過將數據分簇,可以比較清晰地獲取斷面輪廓數據信息。由于傳感器采集的斷面數據密度分布不均勻且存在外部環境噪聲,選取基于密度的聚類算法(Density-Based Spatial Clustering of Applications with Noise,DBSCAN),先掃描斷面全部數據點,如果數據點的ε鄰域內點數目大于核心點閾值,則將其納入核心點列表并形成對應的臨時聚類簇。對每個臨時聚類簇檢查其中的點是否為核心點,如果是,則將該點對應的臨時聚類簇和當前臨時聚類簇合并,得到新的臨時聚類簇。繼續對剩余的臨時聚類簇進行相同的合并操作,直到全部臨時聚類簇被處理。聚類結果中不同顏色的點表示不同聚類,如圖5所示。
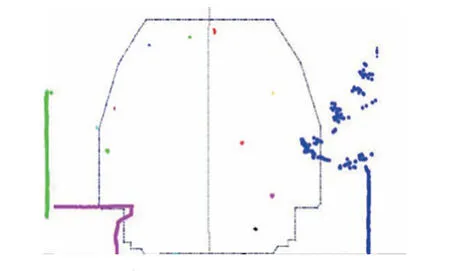
圖5 聚類結果示例
相比傳統聚類分析方法如基于劃分的K-means算法和層次聚類算法,DBSCAN 算法可以獲得更高的執行效率和更好的聚類效果。DBSCAN算法不用事先指定類的數目,可以發現任意形狀的類,能找出數據中的噪聲,且對噪聲不敏感,聚類結果不依賴于節點的遍歷順序。
2.2 侵限判別方法
根據聚類分析結果,分析限界采集數據的聚類特征和狀態變化,判斷是否為侵限。侵限判別方法步驟為:首先從每個聚類的離散空間點集中抽象出其直觀形狀,即提取出所有平面離散點集的聚類輪廓;然后計算其輪廓特征;最后按照侵限條件及相鄰幀狀態變化情況,判斷該聚類侵限狀態。
2.2.1 輪廓提取
侵限判別方法基于有效聚類區域的輪廓提取。輪廓提取[10]須要遍歷聚類內每兩點連線,判斷該線段是否在輪廓邊界上,直到找到所有邊界線段為止。根據上述輪廓提取算法,可以準確提取限界侵限數據中的站臺、線路環境和外部環境干擾輪廓。聚類輪廓結果如圖6所示。
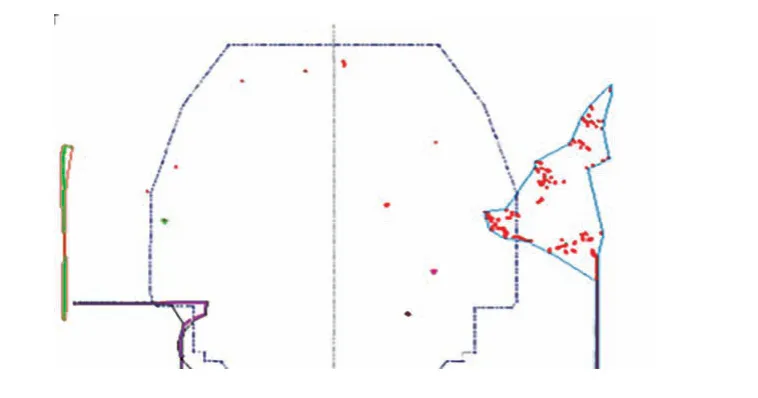
圖6 提取聚類輪廓結果示例
2.2.2 侵限判別
根據每個聚類輪廓提取結果可以計算輪廓特征,包括面積和質心。按照侵限判別定義,計算輪廓面積是否大于侵限面積閾值。如果是,則為侵限聚類;否則要判別與相鄰幀間聚類輪廓的質心位置關系,直到判別出所有侵限聚類為止。該侵限判別包含兩個閾值參數:最小聚類輪廓面積Amin和相鄰幀中同屬類的質心移動距離MD。侵限判別算法流程如圖7 所示。其中,MD1表示前一幀聚類質心的位置,MD2表示當前幀聚類質心的位置。
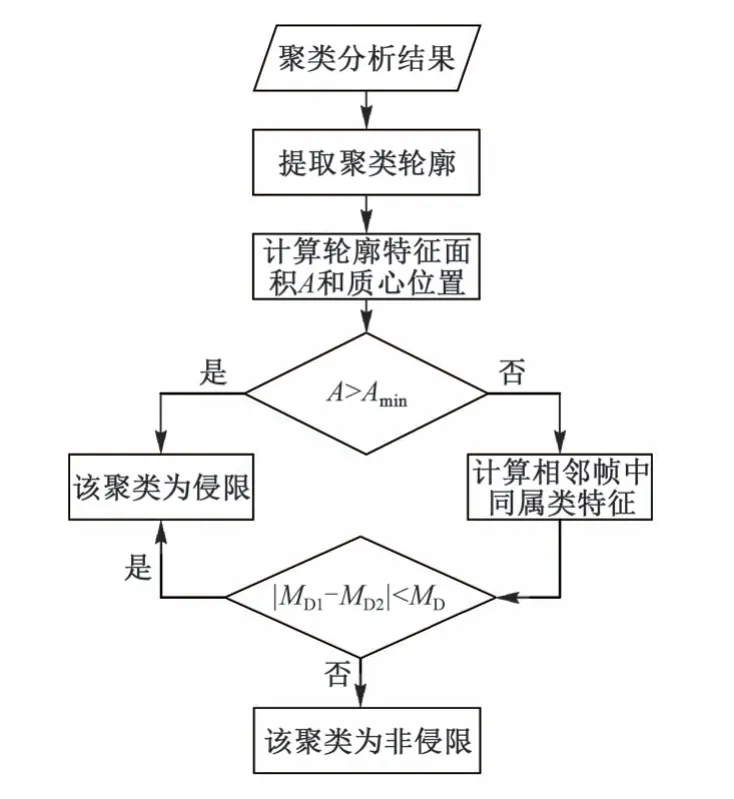
圖7 侵限判別算法流程
該判別算法相對現有算法有兩個顯著優勢:
1)適應能力強。該算法對外部環境變化和采集數據變化不敏感,可以將不同物體分別聚類并判別侵限狀態,具有較強的適應能力。
2)準確率高。該算法選取相鄰幀狀態變化作為判別條件,提高了復雜場景的檢測準確率,侵限分析處理時間小于4 ms。
3 應用驗證
在綜合檢測車運行情況下,運用限界侵限檢測系統,結合本文侵限檢測方法對國內某線路進行檢測,對侵限判斷結果進行準確性評價,以限界分析結果作為標準計算每一張圖片的準確度。準確率是給定數據集中分類正確樣本個數和總樣本數的比值,即

式中:STP是將侵限預測為侵限的樣本數;SFN是將侵限預測為非侵限的樣本數;SFP是將非侵限預測為侵限的樣本數;STN是將非侵限預測為非侵限的樣本數。
將傳感器采集數據分為三類:密集點云數據、稀疏點云數據、跨限界臨界區數據,分別包含340936,163524,198582 張圖片。利用本文算法進行檢測,并與現有侵限判別算法的檢測結果對比,如圖8 所示。其中紅色矩形區域為侵限檢測結果。
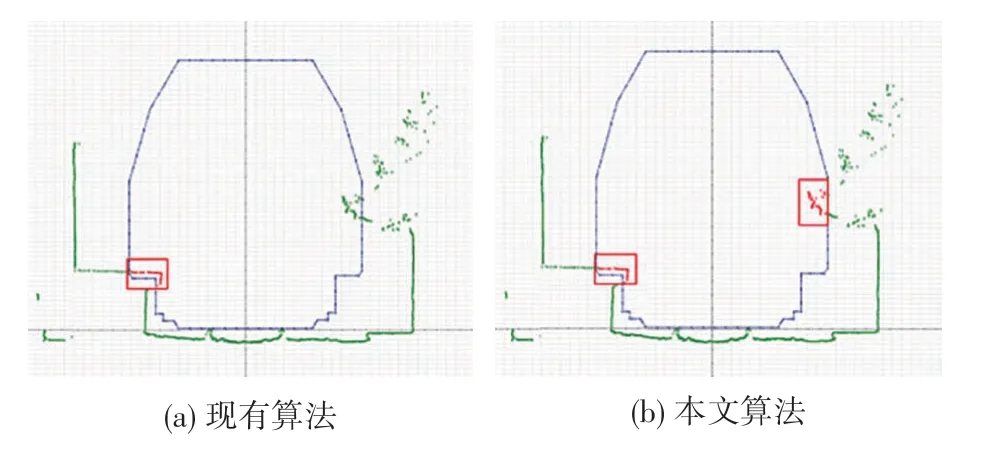
圖8 兩種算法檢測結果對比
由圖8 可以看出,現有侵限判別算法容易受到異物和外部環境干擾,將侵限異物判別為非侵限。將離散點聚類誤判為侵限會直接影響限界侵限分析結果的準確性。將非異物判為異物,需要大量人工復核工作,容易造成誤判。基于聚類分析和圖像處理技術的侵限判別算法可以將不同離散點進行聚類,再提取每個聚類的輪廓特征,最后通過圖像處理算法判定侵限狀態,有效克服了外部環境干擾,實現了自動化和智能化動態檢測,準確率更高。
分別對三類數據進行算法驗證,并對侵限檢測結果進行準確率評價,見表1。
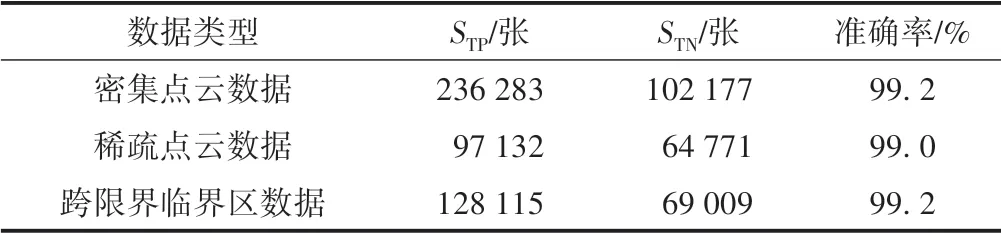
表1 侵限判別算法結果統計
從表1可以看出,侵限判別算法平均準確率不小于99%,而現有算法準確率為84%,本文算法平均準確率提高了15%。從準確性和泛化性角度,本文算法充分考慮不同異物侵限的聚類特征,并根據相鄰幀狀態變化作為侵限判別條件,可以適應不同異物侵限和外部環境,具有良好的泛化性。
4 結語
本文提出了一種車載非接觸式的限界異物侵限檢測分析方法,并在實際檢測線路成功引用,實現了限界異物侵限的快速和準確檢測。該方法有效克服了外部環境的影響,同時兼顧了檢測實時性要求,準確率達到99%,算法執行時間小于4 ms,可以滿足綜合巡檢車以最高120 km/h的速度進行檢測。
猜你喜歡
中國設備工程(2022年12期)2022-07-11 04:33:00
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:36
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:34
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:50
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:48