光電轉塔自動搜索跟蹤監視低小慢目標控制方法
2021-04-07 12:22:06張龍浩陳國強程慶敏
激光與紅外 2021年3期
張龍浩,陳國強,徐 梁,沈 騰,程慶敏
(中國航空工業集團公司洛陽電光設備研究所,河南 洛陽,471000)
1 引 言
低小慢目標是指具有低空、超低空飛行,尺寸小,飛行速度較慢等特征的小型飛行器等目標,低小慢目標目前已對我國機場、油田等事關民生國防的重要場所構成重大安全威脅[1]。對低小慢目標有效、快速、準確的發現、跟蹤、識別,從而實現全天時、全天候、全方位、自動化的低小慢監視能力具有重大的意義。也是進一步實現對低小慢目標進行干擾壓制和殺傷摧毀的基礎。
目前對低小慢目標的探測方式主要有雷達探測和光電探測。目前國內環掃LFMCW雷達系統可以在復雜雜波背景對低小慢目標探測,并對探測范圍內的低小慢無人機進行自動跟蹤[2],但是雷達難以探測目標的輪廓特征和辨別目標的形態和種類。光電探測也是探測低小慢目標的重要方式。但目前對低慢小目標的光電探測系統大多依賴人工手動搜索,效率低,消耗人精力,且人工很容易看漏目標。自動化程度較低,無法實現人不管。提出了一種對低小慢目標實現全自動搜索跟蹤監視的光電轉塔控制方法,可以在雷達的配合下,實現全自動工作,無需手動操作光電轉塔。
2 系統組成
低小慢目標跟蹤監視光電轉塔是低小慢目標自動跟蹤監視系統的一部分(如圖1所示),低小慢目標自動跟蹤監視系統,由雷達系統、光電轉塔、和光電轉塔顯示控制系統組成(如圖2所示),他們共同工作,實現對對低小慢目標的自動發現、跟蹤、監視、識別。

圖1 低小慢目標跟蹤監視光電轉塔

圖2 低小慢目標自動跟蹤監視系統組成圖
雷達系統主要由環掃線性調頻連續波(LFMCW)雷達組成,LFMCW雷達是探測近程低小慢目標的常用傳感器,具有高距離分辨率、高接收靈敏度、低發射功率,全天候工作等優點[3]。雷達系統可以自動探測低小慢目標給出目標位置信息,并發送給光電轉塔,引導光電轉塔對目標進行自動搜索、跟蹤監視和識別。
光電轉塔顯示控制系統可以向光電轉塔發送控制信息,顯示可見光紅外圖像、光電轉塔運行信息和探測到的低小慢目標信息,如操作人員如對其他目標感興趣也可通過顯示控制系統讓光電轉塔退出全自動模式,手動控制轉塔。
低小慢目標跟蹤監視光電轉塔是具備晝夜間目標搜索成像功能的兩軸四框架光電轉塔。轉塔內有長焦高清可見光傳感器和長焦制冷式紅外傳感器兩個傳感器。
轉塔內有慣性姿態測量單元,可以輸出轉塔光軸的空間姿態信息。根據光軸姿態信息、轉塔自身和目標地理位置等信息可以算出使轉塔對準已知地理位置目標所需轉動到的方位俯仰角。
光電轉塔內有圖像處理器,它可以對光電轉塔傳感器采集的紅外圖像進行處理并對低小慢目標進行自動檢出和跟蹤。圖像處理器采集實時紅外圖像后,首先會使用目標對比度增強算法對圖像進行預處理并對目標背景進行抑制,然后會對圖像進行分割及虛警抑制對序列圖像進行多幀關聯來提取目標[3],并將信噪比最高的目標進行檢出和鎖定,該算法能運行在嵌入式設備上,快速準確的目標檢測。該方法易于實現,能提高檢測概率,較好并且實時完整地檢測出視頻圖像中的低小慢目標,并且降低虛警率,圖像處理器檢測低小慢目標流程圖如圖3所示。

圖3 圖像處理器檢測低小慢目標流程圖
3 實施方法
在低小慢目標跟蹤監視光電轉塔內,傳感器自動控制系統和運動自動控制系統兩個系統配合工作,共同實現實現光電轉塔的全自動化工。
3.1 準備工作
首先在地面上已知地理位置信息點(經度Lo、緯度Bo、高度ho)的位置安裝光電轉塔,并且雷達系統和光電轉塔相交聯,使雷達可以實時向光電轉塔傳輸探測到的低小慢目標所在的的預測地理位置(經度La、緯度Ba、高度ha)。地面開機的檢查工作,光電轉塔上電完成初始化并自檢,向顯示控制系統發送系統參數信息,并接收顯示控制系統控制。同時光電轉塔等待雷達發送目標信息,當收到雷達信息后,光電轉塔自動進入自動化工作模式。
3.2 傳感器自動控制系統
傳感器自動控制系統會自動控制可見光傳感器和紅外傳感器視場將低小慢目標以合適的大小顯示在圖像中,并且自動調焦使目標清晰。
根據低小慢目標所在的預測地理位置(La、Ba、ha)和光電轉塔所在的地理位置(Lo、Bo、ho),將兩點對經緯高轉化為兩點在地球坐標系中的坐標,便可求出目標預測點和光電轉塔間的距離(Lao)[4]。
觀察點A的經度LA,緯度BA,海拔高度hA。在地球坐標系中的坐標為:
其中:
其中,a為地球橢球長半軸;e為地球橢球第一偏心率。
因為低小慢目標在紅外圖像中特征更明顯,所以紅外傳感器提供紅外圖像給圖像處理器用于低小慢目標檢出和跟蹤,可見光傳感器用于輔助觀察。
轉塔內的傳感器自動控制系統可以根據目標預測點和光電轉塔間的距離(Lao)控制轉塔內的紅外可見光傳感器自動調焦變倍,使低小慢目標可以在圖像一直保持清晰和在圖像內有合適的大小。
根據目標預測距離Lao和低小慢目標的平均大小可以調節紅外和可見光圖像視場角大小,使目標在紅外圖像內有適合檢出和觀察的大小可見圖像內也適合觀察。設低小慢目標的平均尺寸為LD,那么目標在視頻畫面中所占像素數可用以下公式計算得出:
其中,P為目標在視頻中橫向和縱向所占的像素寬度;F為傳感器視場角;R為視頻分辨率。
根據目標預測距離Lao對可見光傳感器和紅外傳感器進行自動調焦,使目標在圖像內清晰。圖4是傳感器自動控制系統的工作流程圖。

圖4 傳感器自動控制系統的工作流程圖
3.3 運動自動控制系統
轉塔內的運動控制系統和圖像處理器配合工作,實現對低小慢目標的自動對準和跟蹤。
根據光電轉塔地理位置(La、Ba、ha)和目標預測點地理位置(Lo、Bo、ho)通過坐標轉換可以算出這兩個點在地球坐標系內的坐標(OXYZq),進而計算出這兩點在慣導坐標系內的坐標(OXYZh),然后可計算出在慣導坐標系(OXYZh)下光電轉塔指向目標預測點的方向矢量[5]。光電轉塔內的慣性姿態測量單元輸出了紅外傳感器和可見光傳感器的光軸姿態、根據光軸的姿態、目標預測坐標的方向矢量和轉塔的方位俯仰角,可以計算出需要使轉塔的瞄準線對準目標預測點所需要的轉塔方位角η1和俯仰角η2。

圖5 轉塔瞄準線對準目標預測點原理圖
當系統全自動流程開始時,光電轉塔運動控制系統進入角度對準模式,轉塔的方位俯仰角對準η1、η2,從而驅動瞄準線指向目標預測位置,當轉塔實時方位俯仰角θ1,θ2和對準預測目標方位俯仰角η1,η2的絕對差小于閾值,且轉塔紅外和可見傳感器根據目標預測距離Lao調焦變倍到位時,轉塔控制圖像處理器開始在轉塔紅外圖像內檢出信噪比最高的紅外小目標。如果檢出目標成功,轉塔圖像處理器鎖定目標并向轉塔運動系統報告目標和紅外圖像中心的偏差量,光電轉塔運動控制系統進入圖像跟蹤模式,控制轉塔轉動將目標拉到圖像中心對目標進行持續跟蹤[6]。
由于雷達系統從發現目標到計算出目標坐標并報告光電轉塔目標有一定時間(3 s左右)的延時,所以對準目標預測點后,目標未必在轉塔傳感器視場范圍內,所以需要對視場的鄰近區域也進行搜索。如果對準后圖像處理器未檢出目標,運動控制系統控制轉塔在對準的方位俯仰角η1,η2的鄰近區域內進行小范圍掃描,并繼續檢出低小慢目標,設ξ1、ξ2為轉塔實時對準的方位俯仰角的給定值,則有:
ξ1=η1+Aφ1sin(ωt)
ξ2=η2+Aφ2sin(ωt)
其中,A為掃描幅值系數;ω為掃描頻率;φ1、φ2分別為轉塔當前的紅外視場方位角和俯仰角。
當檢出目標后并穩定跟蹤一段時間后,可以根據圖像視場、目標預測距離Lao和圖像中的目標像素大小估算目標的大小,設LM為目標大小,則有:
其中,P為目標在視頻中橫向和縱向所占的像素寬度;F為傳感器視場角;R為視頻分辨率。
常見的低小慢目標包括旋翼無人機(軸距0.4~1.8 m)和固定翼無人機(翼展1~4 m),可以根據估算的目標大小對低小慢目標類型做初步的判斷。
在個別天氣條件下,如天空中有很多碎云的時候,可能會出現檢出目標錯誤的情況,此時轉塔在檢出目標并進入圖像跟蹤模式后也會跟蹤錯誤的目標。但是這時由于跟蹤的目標錯誤,轉塔實時方位俯仰角θ1,θ2和對準預測目標方位俯仰角η1,η2的差值會逐漸增大,當差值大于閾值時,此時運動控制系統控制轉塔重新進入角度對準模式對準η1,η2,對準后系統會自動重新嘗試進行檢出和跟蹤,直到對準正確目標。
當雷達檢測到新目標時,由于目標預測點地理位置(Lo、Bo、ho)大幅變化,對準預測目標方位俯仰角η1,η2也會大幅變化,此時轉塔角度方位俯仰角θ1,θ2和目標方位俯仰角η1,η2的差也會大于閾值,系統會自動重新對準進入新一輪的自動化進程。圖6是光電轉塔自動運動控制系統的工作流程圖。
4 試驗驗證與結果分析
為驗證低小慢目標跟蹤監視光電轉塔對低小慢目標的全自動跟蹤監視識別的效果和性能,使用多種低小慢目標在不同距離多種天氣條件下進行了試驗。試驗中轉塔能夠成功的對低小慢目標進行檢出監視,識別目標的輪廓特征和辨別目標的形態和種類如圖7、8所示。
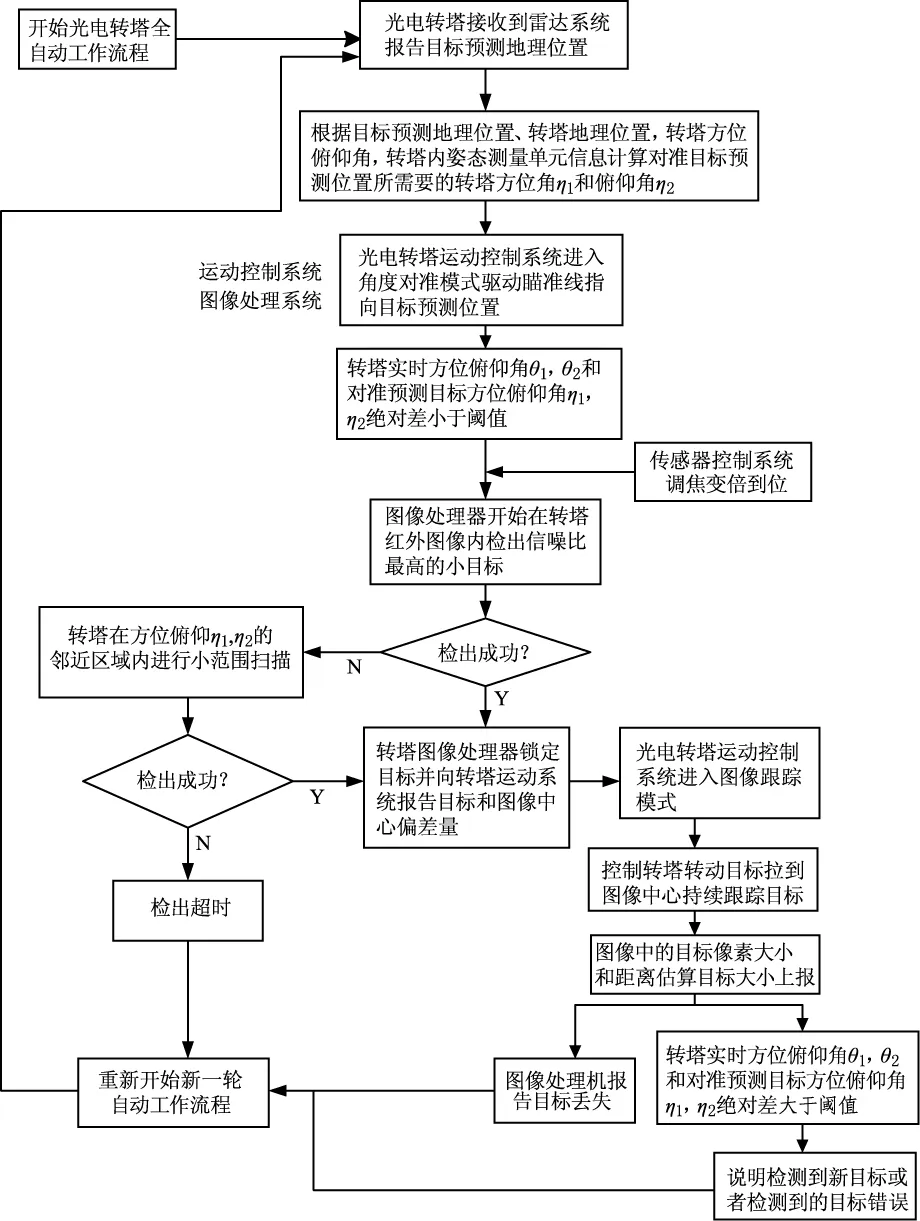
圖6 光電轉塔自動運動控制系統的工作流程圖

圖7 光電轉塔紅外圖像檢出低小慢目標

圖8 光電轉塔可見光傳感器發現低小慢目標
表1給出了光電轉塔對多種小目標自動跟蹤監視試驗結果,試驗中光電轉塔對多種低小慢目標均能成功進行檢出和識別,對于大的低小慢目標的檢出識別距離更遠,另外天氣也會對低小慢目標的識別距離有一定的影響。

表1 光電轉塔對多種小目標自動跟蹤監視試驗結果
5 結 論
本文提出了一種低小慢目標實現全自動搜索跟蹤監視的光電轉塔控制方法,可以實現全自動工作,無需手動操作光電轉塔。在雷達發現低小慢目標后,光電轉塔會自動搜索對準檢出目標,將目標以合適的大小清晰的顯示在圖像中并一直跟蹤,并對目標的大小估算初步識別。如果目標錯誤丟失可以自動退出目標跟蹤,并自動重新嘗試對目標進行搜索跟蹤。雷達報告新的目標轉塔會自動切換跟蹤新的目標。
試驗證明,該方法可以全自動實現對各種常見的低小慢目標的發現、自動跟蹤監視和識別,由于整個工作流程全自動化,此種控制方法工作大大節省了人力,提高了效率,減少了目標漏檢出,并可以對目標的大小估算初步識別。