自動(dòng)駕駛汽車硬件在環(huán)仿真實(shí)驗(yàn)平臺(tái)研發(fā)
2021-04-06 01:09:24雍加望馮能蓮
實(shí)驗(yàn)技術(shù)與管理 2021年2期
關(guān)鍵詞:系統(tǒng)
雍加望,馮能蓮,陳 寧
(1. 北京工業(yè)大學(xué) 北京市交通工程重點(diǎn)實(shí)驗(yàn)室,北京 100124;2. 清華大學(xué) 汽車安全與節(jié)能國(guó)家重點(diǎn)實(shí)驗(yàn)室,北京 100084;3. 北京工業(yè)大學(xué) 環(huán)境與生命學(xué)部,北京 100124)
世界汽車工業(yè)發(fā)展圍繞著“安全、舒適、節(jié)能”3 大主題,正朝著“四化”趨勢(shì)發(fā)展,即智能化、電動(dòng)化、輕量化與交通網(wǎng)聯(lián)化[1-4],而集成環(huán)境感知、高精地圖、決策控制及人工智能等技術(shù)的自動(dòng)駕駛汽車則是這一趨勢(shì)的最終核心產(chǎn)物。作為變革性技術(shù)的自動(dòng)駕駛汽車將在今后較長(zhǎng)一個(gè)時(shí)期內(nèi)成為國(guó)內(nèi)外汽車工業(yè)發(fā)展的主流趨勢(shì),也是當(dāng)前全球新一輪產(chǎn)業(yè)技術(shù)變革的戰(zhàn)略前沿[5-8]。
硬件在環(huán)仿真系統(tǒng)是自動(dòng)駕駛汽車技術(shù)測(cè)試與驗(yàn)證的重要平臺(tái),具有周期短、成本低及效率高等優(yōu)點(diǎn)。因此,學(xué)者們?cè)谧詣?dòng)駕駛硬件在環(huán)仿真技術(shù)方面做出了大量研究。美國(guó)辛辛那提大學(xué)Ma 等提出一種網(wǎng)聯(lián)自動(dòng)駕駛汽車硬件在環(huán)測(cè)試系統(tǒng),將實(shí)車集成到虛擬交通仿真環(huán)境(VISSIM 軟件)中,為自動(dòng)駕駛算法提供了豐富的虛擬仿真場(chǎng)景,并在平臺(tái)上驗(yàn)證了自適應(yīng)巡航算法的有效性[9],隨后又驗(yàn)證了隊(duì)列感知的交叉路口信號(hào)控制方法的有效性[10]。西安交通大學(xué)Chen等提出一種新型硬件在環(huán)仿真平臺(tái),其結(jié)構(gòu)分為4 層,即車輛仿真層、虛擬傳感器層、虛擬環(huán)境層及電子控制層,平臺(tái)具有以下功能:①支持汽車動(dòng)力學(xué)模型、傳感器和虛擬環(huán)境的構(gòu)建與仿真;②實(shí)現(xiàn)場(chǎng)景感知、路徑規(guī)劃、決策與車輛控制策略等性能的閉環(huán)評(píng)估;③進(jìn)一步支持控制策略從平臺(tái)到實(shí)車的快速移植[11]。美國(guó)俄亥俄州立大學(xué)Gelbal 等提出一種用于驗(yàn)證自動(dòng)駕駛算法的硬件在環(huán)仿真器,該仿真器包括dSPACE Scalexio 實(shí)時(shí)機(jī),CarSim 動(dòng)力學(xué)模型軟件,以及2 個(gè)用于V2X 短程通信的DSRC 設(shè)備,該仿真器最高支持L4 級(jí)高速公路場(chǎng)景下的自動(dòng)駕駛算法仿真驗(yàn)證[12]。長(zhǎng)安大學(xué)趙祥模等研發(fā)了一種基于整車在環(huán)的自動(dòng)駕駛快速測(cè)試平臺(tái),由汽車行駛阻力模擬子系統(tǒng)、虛擬場(chǎng)景自動(dòng)生成子系統(tǒng)、虛擬傳感器模擬子系統(tǒng)、駕駛模擬器及測(cè)試記過自動(dòng)分析子系統(tǒng)等組成,可以實(shí)現(xiàn)汽車行駛阻力的實(shí)時(shí)模擬,并滿足各種場(chǎng)景下的自動(dòng)駕駛整車性能測(cè)試與評(píng)價(jià)需求[13]。
自動(dòng)駕駛汽車技術(shù)的迅猛發(fā)展對(duì)汽車控制提出了新的要求,對(duì)車輛控制衍生的安全性、舒適性及穩(wěn)定性等傳統(tǒng)性能的要求也在不斷提升。學(xué)者們研究的自動(dòng)駕駛汽車硬件在環(huán)仿真系統(tǒng)更多關(guān)注于算法、虛擬場(chǎng)景及傳感器等的測(cè)試,缺少對(duì)汽車安全性、舒適性與穩(wěn)定性起到關(guān)鍵影響的底盤執(zhí)行器方面的測(cè)試與驗(yàn)證。因此,本文提出一種自動(dòng)駕駛汽車硬件在環(huán)仿真實(shí)驗(yàn)平臺(tái)(AVHIL),可為自動(dòng)駕駛上層控制算法與底層執(zhí)行機(jī)構(gòu)的開發(fā)與測(cè)試、自適應(yīng)巡航(ACC)、自動(dòng)緊急制動(dòng)(AEB)、車道保持(LKA)等高級(jí)駕駛輔助系統(tǒng)(ADAS)功能開發(fā)與測(cè)試、駕駛員行為特性研究等提供實(shí)時(shí)高效的仿真平臺(tái)。
1 AVHIL 總體方案設(shè)計(jì)
AVHIL 總體框圖如圖1 所示。系統(tǒng)硬件部分主要由駕駛模擬器、上位機(jī)(主機(jī))、域控制器(dSPACE MicroAutoBox)、下位機(jī)(PXI)、顯示器及電氣柜等組成。其中,駕駛模擬器包括執(zhí)行機(jī)構(gòu)(線控制動(dòng)系統(tǒng)和線控轉(zhuǎn)向系統(tǒng))和駕駛員操縱機(jī)構(gòu)等;顯示器包括操控顯示器與場(chǎng)景顯示器;電氣柜用于放置主機(jī)、dSPACE、PXI、動(dòng)力電池、強(qiáng)電走線及保護(hù)、信號(hào)走線及保護(hù)、連接器、操作開關(guān)等。

圖1 A VHIL 總體框圖
上位機(jī)主要運(yùn)行PreScan 軟件和人機(jī)操作界面,PreScan 一方面提供虛擬現(xiàn)實(shí)界面,為自動(dòng)駕駛提供近似真實(shí)的測(cè)試工況場(chǎng)景;另一方面為自動(dòng)駕駛提供環(huán)境感知傳感器信號(hào),包括毫米波雷和攝像頭等。PreScan 將傳感器原始數(shù)據(jù)通過CAN 網(wǎng)絡(luò)發(fā)送至域控制器;域控制器根據(jù)接收的感知信息進(jìn)行決策判斷,通過CAN 網(wǎng)絡(luò)向下位機(jī)發(fā)送制動(dòng)、轉(zhuǎn)向和油門控制指令;下位機(jī)運(yùn)行CarSim 整車動(dòng)力學(xué)模型,根據(jù)域控制器的控制指令及底層傳感器信號(hào),實(shí)現(xiàn)線控制動(dòng)、轉(zhuǎn)向及驅(qū)動(dòng)系統(tǒng)的閉環(huán)控制,在保證實(shí)現(xiàn)功能的前提下,優(yōu)化軌跡跟蹤性能、穩(wěn)定性和舒適性指標(biāo)等。AVHIL 實(shí)物圖如圖2 所示。

圖2 A VHIL 實(shí)物圖
2 關(guān)鍵部件匹配與軟件選型
2.1 實(shí)時(shí)處理器
AVHIL 具備域控制器和下位機(jī)2 套完整的實(shí)時(shí)系統(tǒng)。域控制器執(zhí)行自動(dòng)駕駛上層控制算法,需實(shí)現(xiàn)的指標(biāo)包括:①動(dòng)力學(xué)穩(wěn)定性指標(biāo),通過二自由度車輛模型得到車輛動(dòng)力學(xué)穩(wěn)定性表征參數(shù)(質(zhì)心側(cè)偏角、橫擺角速度、車身側(cè)偏角、輪胎滑移率等)的名義值,通過狀態(tài)觀測(cè)器估算得到車輛動(dòng)力學(xué)穩(wěn)定性表征參數(shù)實(shí)際值,將名義值與實(shí)際值的偏差作為衡量動(dòng)力學(xué)穩(wěn)定性的指標(biāo);②路徑跟蹤性能指標(biāo),考慮橫縱向路徑跟蹤精度,引入駕駛員預(yù)瞄―跟蹤模型,以預(yù)瞄點(diǎn)處橫向偏差作為衡量路徑跟蹤性能的指標(biāo);③乘員舒適性指標(biāo),考慮縱向加速度、縱向急動(dòng)度所表征的縱向舒適性與橫向加速度、橫向急動(dòng)度所表征的橫向舒適性,將二者加權(quán)得到乘員舒適性指標(biāo);④綜合指標(biāo),將路徑跟蹤性能、乘員舒適性和燃油經(jīng)濟(jì)性指標(biāo)進(jìn)行加權(quán),得到綜合駕駛性指標(biāo)。在滿足動(dòng)力學(xué)穩(wěn)定性的基礎(chǔ)上,以綜合指標(biāo)最優(yōu)為目標(biāo),實(shí)現(xiàn)底層執(zhí)行機(jī)構(gòu)的多目標(biāo)優(yōu)化控制。
域控制器選用dSPACE 公司的MicroAutoBox。下位機(jī)用于系統(tǒng)信號(hào)采集及底層執(zhí)行機(jī)構(gòu)閉環(huán)控制,需要實(shí)現(xiàn)的指標(biāo)包括:①方向盤轉(zhuǎn)角控制誤差<1°;②優(yōu)化轉(zhuǎn)角響應(yīng)時(shí)間<70 ms;③目標(biāo)轉(zhuǎn)角修正區(qū)域±5°;④制動(dòng)液壓控制精度±0.4 MPa;⑤制動(dòng)液壓建立時(shí)間<300 ms;⑥質(zhì)心側(cè)偏角<6°;⑦橫向加速度<3.6 m/s2。下位機(jī)選用NI 公司的PXI。
MicroAutoBox 選用 4 核 1401 處理器,主頻2.6 GHz,內(nèi)存4GB,配置DS1513、DS1514 和DS4342模塊,具備6 路CAN、32 路AI 口(±10 V,分辨率16位)、8 路AO 口(±10 V,分辨率16 位)及24 路DIO口(0~40 V,分辨率16 位)。上位機(jī)PXI 控制器選擇2.6GHz 4 核 PXI 系統(tǒng)嵌入式處理器(PXIe-8840 Quad-Core RT),可用于處理器密集型、模塊化儀器和數(shù)據(jù)采集應(yīng)用;4GB 單通道1 600 MHz DDR3 RAM;配置PXI8512/2 板卡3 塊,可以實(shí)現(xiàn)6 路CAN 通信功能;配置PXIe-4304 板卡1 塊、PXI-6704 板卡1 塊、PXI-7841R 板卡1 塊,具備40 路模擬量輸入通道、40路模擬量輸出通道及96 路雙向數(shù)字通道。
2.2 底層執(zhí)行機(jī)構(gòu)
該平臺(tái)中,控制算法周期運(yùn)算的控制指令通過各接口發(fā)送至底層執(zhí)行機(jī)構(gòu),包括發(fā)動(dòng)機(jī)扭矩請(qǐng)求接口、轉(zhuǎn)向角度請(qǐng)求接口、制動(dòng)壓力/減速度請(qǐng)求接口。其中,發(fā)動(dòng)機(jī)扭矩請(qǐng)求通過電子油門或自動(dòng)駕駛算法獲取,直接反饋至車輛動(dòng)力學(xué)模型。
線控轉(zhuǎn)向系統(tǒng)采用雙電機(jī)冗余方案,在原車型配置的電動(dòng)助力轉(zhuǎn)向系統(tǒng)(EPS)基礎(chǔ)上,加裝主動(dòng)轉(zhuǎn)向電機(jī),如圖3 所示。主動(dòng)轉(zhuǎn)向電機(jī)與EPS 電機(jī)互為冗余,在二者之一發(fā)生故障時(shí),未發(fā)生故障電機(jī)單獨(dú)實(shí)現(xiàn)轉(zhuǎn)向控制,保障線控轉(zhuǎn)向系統(tǒng)的安全性與可靠性。在人工駕駛模式下,EPS 實(shí)現(xiàn)助力轉(zhuǎn)向功能,主動(dòng)轉(zhuǎn)向電機(jī)不介入,僅在危險(xiǎn)工控或自動(dòng)駕駛介入時(shí)加以轉(zhuǎn)向修正控制;在自動(dòng)駕駛模式下,主動(dòng)轉(zhuǎn)向電機(jī)實(shí)現(xiàn)轉(zhuǎn)向請(qǐng)求角度跟隨控制。在轉(zhuǎn)向管柱加裝轉(zhuǎn)角傳感器,其測(cè)量范圍為±750°,測(cè)量精度為0.1°。

圖3 雙電機(jī)冗余線控轉(zhuǎn)向系統(tǒng)
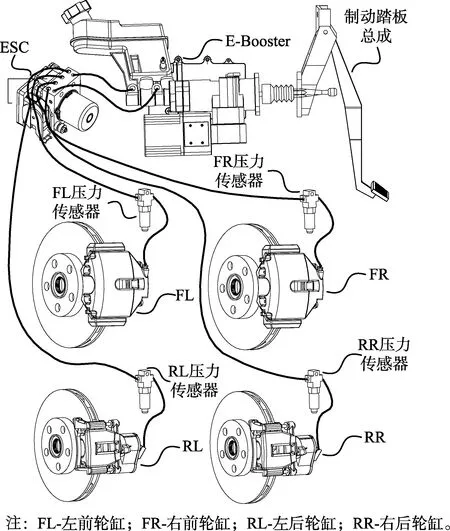
圖4 線控制動(dòng)系統(tǒng)組成框圖
線控制動(dòng)系統(tǒng)采用電動(dòng)助力器(E-Booster)與電子穩(wěn)定控制系統(tǒng)(ESC)聯(lián)合實(shí)現(xiàn),系統(tǒng)組成框圖如圖4 所示。構(gòu)型為單主缸雙通道,X 型布置,即左前輪、右后輪輪缸對(duì)應(yīng)同一制動(dòng)回路,右前輪、左后輪輪缸對(duì)應(yīng)同一制動(dòng)回路,如進(jìn)行制動(dòng)時(shí)單一回路發(fā)生泄漏,剩余回路的制動(dòng)力基本能保持正常制動(dòng)力的一半。常規(guī)工況下,制動(dòng)助力功能與制動(dòng)壓力/減速度請(qǐng)求由T-Booster 實(shí)現(xiàn);ESC 實(shí)現(xiàn)增壓、保壓及減壓等制動(dòng)壓力調(diào)節(jié)功能,調(diào)整車輛運(yùn)動(dòng)狀態(tài)以滿足動(dòng)力學(xué)穩(wěn)定性指標(biāo)。當(dāng)T-Booster 與ESC 二者之一存在故障時(shí),由未發(fā)生故障總成實(shí)現(xiàn)制動(dòng)壓力/減速度請(qǐng)求控制。當(dāng)T-Booster 與ESC 二者均存在故障時(shí),駕駛員踩制動(dòng)踏板的腳力通過制動(dòng)液傳遞至制動(dòng)輪缸,實(shí)現(xiàn)人力備份功能。制動(dòng)壓力控制范圍為0~12 MPa。4 個(gè)輪缸配置制動(dòng)壓力傳感器,測(cè)量范圍0~20 MPa,測(cè)量精度為1%。
2.3 軟件選型
在通信層面上,底層負(fù)載與執(zhí)行機(jī)構(gòu)信號(hào)通過EDAC 接口與下位機(jī)交互,下位機(jī)與上位機(jī)之間通過網(wǎng)線與CAN 總線通信,下位機(jī)、上位機(jī)與域控制器之間通過CAN 總線通信,如圖5 所示。具體軟件選型如下:①上位機(jī),PreScan 軟件用于設(shè)計(jì)搭建虛擬駕駛場(chǎng)景,同時(shí)為上層算法提供環(huán)境感知類傳感器信息,采用LabVIEW 軟件搭建人機(jī)交互界面;②域控制器,采用MATLAB/Simulink 軟件用于搭建自動(dòng)駕駛算法模型,并利用快速代碼生成技術(shù)將算法導(dǎo)入至MicroAutoBox;③下位機(jī),整車動(dòng)力學(xué)模型由CarSim軟件提供,實(shí)現(xiàn)與PreScan 軟件及上層算法的聯(lián)合仿真,為其提供實(shí)時(shí)車輛參數(shù)信息,LabVIEW 軟件用于輸出控制指令并采集底層信號(hào)。
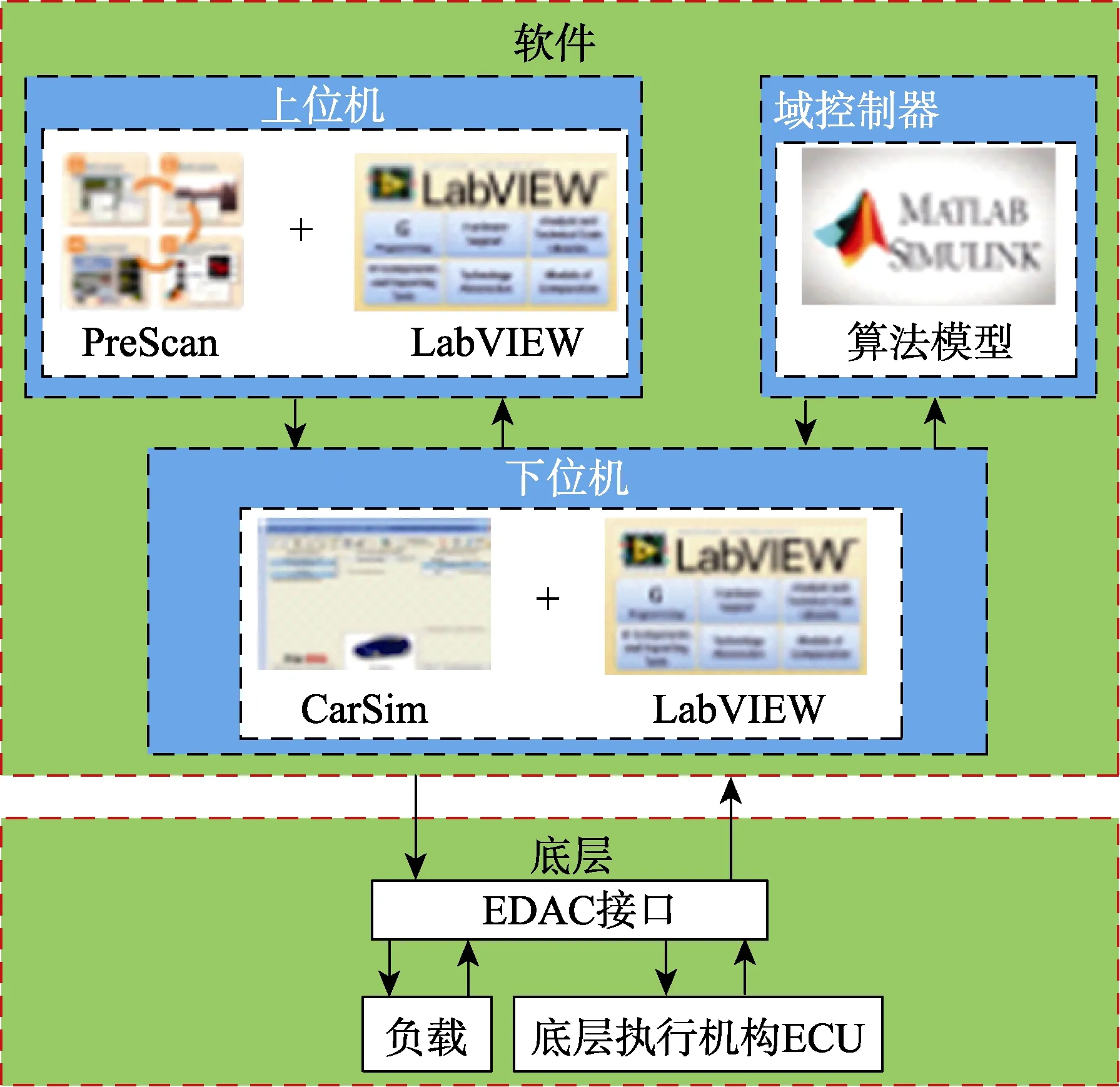
圖5 系統(tǒng)軟件組成框圖
3 AVHIL 仿真測(cè)試結(jié)果
3.1 自動(dòng)駕駛換道功能仿真實(shí)驗(yàn)
換道功能是自動(dòng)駕駛模式下的主要橫向控制工況之一,基于PreScan 軟件提供的環(huán)境及車道線信息,利用Lattice planner 算法并使用五次多項(xiàng)式方法規(guī)劃出多條換道軌跡。對(duì)于規(guī)劃出的多條換道軌跡,首先判斷是否有碰撞危險(xiǎn),若有則予以剔除。對(duì)于安全軌跡,根據(jù)舒適性、穩(wěn)定性與節(jié)能性等多目標(biāo)確定代價(jià)函數(shù),選取代價(jià)函數(shù)最小的軌跡作為最優(yōu)軌跡。最后,控制車輛實(shí)現(xiàn)軌跡跟隨控制。圖6 為換道工況下的方向盤目標(biāo)轉(zhuǎn)角與實(shí)際轉(zhuǎn)角變化曲線,算法可以較好地實(shí)現(xiàn)方向盤轉(zhuǎn)角跟隨控制。圖7 為換道工況下的車速及節(jié)氣門開度變化曲線。
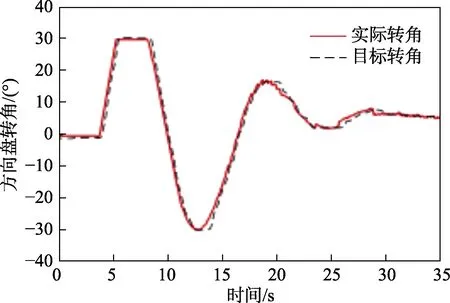
圖6 換道工況下的方向盤轉(zhuǎn)角曲線

圖7 換道工況下的車速及節(jié)氣門開度曲線
3.2 高級(jí)駕駛輔助ACC 功能仿真實(shí)驗(yàn)
ACC 不僅可以改善車輛行駛過程的安全性而且可以適當(dāng)減輕駕駛員的負(fù)擔(dān)。ACC 按照駕駛員設(shè)定的車間時(shí)距,通過調(diào)節(jié)發(fā)動(dòng)機(jī)/電機(jī)驅(qū)動(dòng)扭矩或制動(dòng)力來控制自車的速度和加速度,能夠跟隨目標(biāo)車加速或減速,以保證必要的安全車距。
ACC 系統(tǒng)包括3 種狀態(tài):①關(guān)閉狀態(tài),直接的操作均不能觸發(fā)ACC 系統(tǒng);②等待狀態(tài),ACC 系統(tǒng)已開啟但未介入車輛控制,此時(shí)ACC 系統(tǒng)可以被駕駛員觸發(fā)而進(jìn)入工作狀態(tài);③工作狀態(tài),控制本車車速或本車與前車之間的時(shí)間距。
圖8 為ACC 功能仿真實(shí)驗(yàn)過程的本車車速與前車車速變化曲線,最大車速跟隨誤差為3.6 km/h,最小車速跟隨誤差為0。式(1)中,RMSE 為車速均方根誤差,vdes(t)和vact(t)分別為t時(shí)刻的期望車速與實(shí)際車速,N為采樣點(diǎn)數(shù),利用式(1)計(jì)算得到車速均方根跟隨誤差為1.36 km/h,本車車速控制精度較高。圖9 為ACC 功能仿真實(shí)驗(yàn)過程的制動(dòng)壓力及節(jié)氣門開度變化曲線。
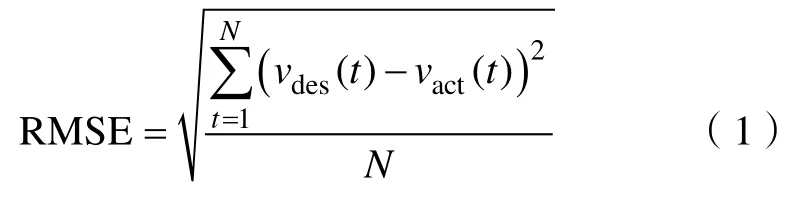
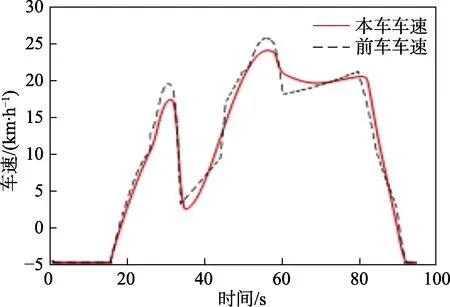
圖8 本車車速與前車車速變化曲線

圖9 本車制動(dòng)壓力與節(jié)氣門開度曲線
3.3 底層執(zhí)行器性能實(shí)驗(yàn)
底層執(zhí)行器性能實(shí)驗(yàn)以E-Booster 為例。E-Booster系統(tǒng)瞬態(tài)響應(yīng)顯著影響著車輛的制動(dòng)安全性能,尤其是當(dāng)車輛處于極限工況時(shí),因此需要對(duì)制動(dòng)壓力跟隨控制(主動(dòng)增壓控制)算法的響應(yīng)特性進(jìn)行測(cè)試。測(cè)試輸入信號(hào)包括階躍信號(hào)和階梯信號(hào)兩種。
圖10 為目標(biāo)壓力為6 MPa 下的主缸壓力響應(yīng)曲線及推桿行程曲線。建立目標(biāo)壓力所需要的時(shí)間大約為150 ms,壓力穩(wěn)態(tài)跟蹤誤差<0.1 MPa。
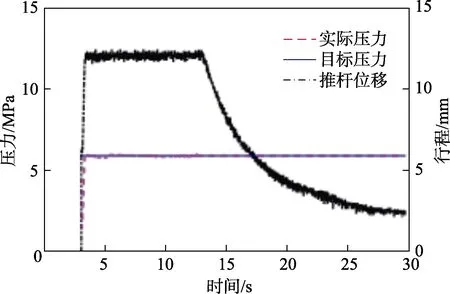
圖10 E-Booster 階躍響應(yīng)特性
為測(cè)試算法階躍響應(yīng)的一致性,進(jìn)行了階梯目標(biāo)壓力信號(hào)輸入響應(yīng)測(cè)試,起始目標(biāo)壓力為3 MPa,之后目標(biāo)壓力每間隔2 s 增加1 MPa,直至8 MPa。隨后,分兩次將目標(biāo)壓力減至4 MPa,測(cè)試E-Booster 減壓特性。圖11 為階梯增壓及減壓測(cè)試結(jié)果,增壓過程中,壓力跟隨均方根誤差為0.15 MPa,算法的階梯增壓響應(yīng)性能及一致性較好;減壓過程中,雖然算法可以迅速調(diào)整并減小控制率,但主缸實(shí)際壓力降低存在一定的滯后。

圖11 E-Booster 階梯增壓及減壓響應(yīng)特性
4 結(jié)語
在自動(dòng)駕駛汽車技術(shù)迅速發(fā)展的背景下,考慮節(jié)省實(shí)驗(yàn)成本、節(jié)約實(shí)驗(yàn)時(shí)間、降低算法驗(yàn)證周期等前提,建立了自動(dòng)駕駛汽車硬件在環(huán)仿真實(shí)驗(yàn)平臺(tái)。本文介紹了AVHIL 總體硬件與軟件技術(shù)方案、關(guān)鍵零部件匹配及軟件選型等內(nèi)容,通過自動(dòng)駕駛換道功能、高級(jí)駕駛輔助ACC 功能及底層執(zhí)行器性能仿真實(shí)驗(yàn),驗(yàn)證了平臺(tái)的功能及性能指標(biāo)。作為有特色的教學(xué)與工程雙創(chuàng)實(shí)踐平臺(tái),AVHIL 可以有效提升師生的創(chuàng)新實(shí)踐能力,培養(yǎng)學(xué)術(shù)與工程并重的復(fù)合型人才。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機(jī)床(2019年10期)2019-10-26 02:47:06
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(hào)(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識(shí)經(jīng)濟(jì)·中國(guó)直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32