基于PLC的溫室穴盤苗移栽控制系統(tǒng)設計
2021-04-02 03:48:41謝博文肖章
機電信息 2021年9期
謝博文 肖章
摘要:首先,對溫室穴盤苗移栽控制系統(tǒng)研究的必要性進行了闡述;其次,對溫室穴盤苗移栽機械的總體結構和控制需求進行了分析;最后,以PLC為控制核心對溫室穴盤苗移栽控制系統(tǒng)進行了設計,并應用PID算法對移栽運動進行了仿真設計與計算。該控制系統(tǒng)對實現(xiàn)溫室穴盤苗移栽自動化具有重要的實際意義。
關鍵詞:PLC;穴盤移栽;控制系統(tǒng)
0? ? 引言
穴盤移栽是溫室穴盤育苗的重要環(huán)節(jié)。當前我國的溫室自動移栽穴盤苗還處于起步階段,大多以手動或半自動機械化為主,需要消耗大量的勞動力[1]。國外針對農(nóng)業(yè)溫室自動移栽機的研究起步較早,技術相對先進,產(chǎn)業(yè)鏈較為完整,已經(jīng)從試驗研究階段走向實際生產(chǎn)階段。而國內(nèi)針對移栽機的研究起步較晚,且大多數(shù)是針對半自動移栽機的研究設計,隨著國家對溫室移栽機研究的支持和投入力度的加大,我國移栽機的研究也在不斷深入。邵琰等[2]針對幼苗植株距離難以把握,可能影響幼苗在穴盤中的種植效率和修剪困難等問題,設計研制出了符合幼苗溫室移栽的STC89C52RC單片機控制系統(tǒng)。王僑等[3-4]為解決當下溫室穴盤苗移栽控制系統(tǒng)無法精準定位檢測幼苗,智能程度差等問題,進行了全自動大田移栽機中的頂苗桿式穴盤苗自動取苗機構的定位控制研究。
本文將基于PLC對溫室穴盤苗移栽控制系統(tǒng)進行設計。
1? ? 溫室穴盤苗移栽機械結構
本研究的移栽機的機械結構主要分為機械框架、機械運動臺、傳動機構、執(zhí)行機構4個部分,如圖1所示。執(zhí)行抓取幼苗機械手的主要組成部分是氣缸、馬達、氣閥、手爪等。傳動機構包括X軸、Y軸、Z軸步進電機驅動絲桿滑塊。執(zhí)行末端單元機械手配合步進電機執(zhí)行操作。步進電機驅動是整個自動移栽驅動系統(tǒng)的主要驅動部分。
2? ? 基于PLC的控制系統(tǒng)設計
溫室穴盤苗移栽控制系統(tǒng)由上位機、PLC、傳感器以及執(zhí)行器組成,如圖2所示。
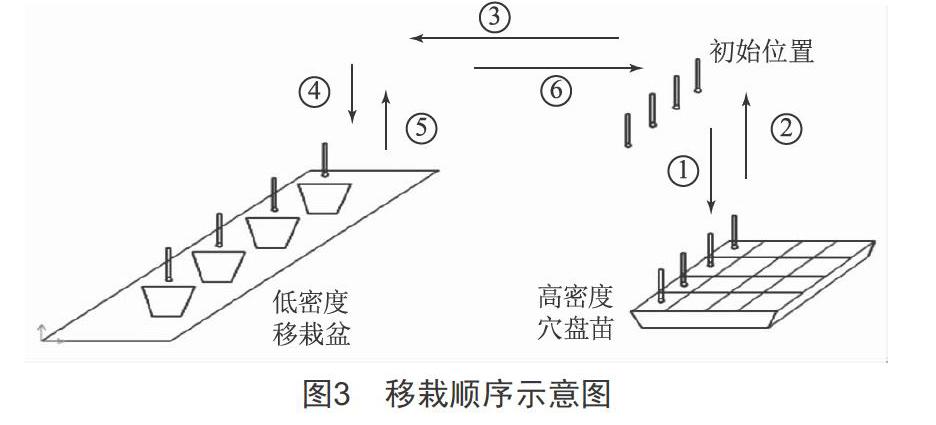
溫室自動移栽機械的工作流程如圖3所示,描述如下:
(1)在預定位置的控制移栽機上,設定特定的各個移栽位置控制距離,再通過PC端軟件相關參數(shù)控制執(zhí)行移栽機械設備開始驅動。
(2)通過機械移栽幼苗控制手調(diào)整幼苗穴格的大小、距離,操縱控制指令①完成抓取幼苗動作。
(3)在將要完成抓取幼苗時,通過驅動電機直線模組完成步驟②,直到能夠到達檢測位置,再驅動另一個方向上的直線模組控制操作執(zhí)行③,讓移栽機械手將已抓取的幼苗往分散的、分開的穴盤輸送,與此同時,執(zhí)行抓取幼苗機械手通過控制器S7-200輸入的相關參數(shù)進行位置間距的調(diào)控。
(4)隨后檢測傳感器探測正下方的穴盤格情況,并操作④下降至相應的位置,成功把穴盤幼苗移栽到目標穴盤中,再通過氣缸的收縮與張開執(zhí)行直線模組驅動操作⑤,使自動移栽機械手移動至相對高度的安全穩(wěn)定位置。
(5)到達相對高度的安全穩(wěn)定位置后,需要再次驅動運動機構至其起初的設定位置,至此完成一個工作流程周期。同時在此過程中,控制器S7-200也需要根據(jù)不同運動間的相互位置、運動距離進行相對數(shù)字參數(shù)的自動檢測輸入調(diào)整,以提高自動移栽全過程的工作流暢度。
本研究中,溫室自動移栽機通過控制X、Y、Z軸方向上的直線模組驅動器驅動機構部分來控制氣壓氣缸驅動裝置,驅動其對移栽穴盤幼苗的抓放指令,實現(xiàn)絲桿滑塊通過直線模組運動傳遞到在高密度穴盤苗與低密度移栽盆之間的氣壓氣缸,再通過氣壓氣缸的收縮和張開完成幼苗移栽過程以及PID算法進行精確定位,提高位置移栽的精確度。
3? ? PID控制與仿真
為了將穴盤中的幼苗移栽至正確的位置,必須保證機械手在系統(tǒng)穩(wěn)定安全可靠的環(huán)境下運行,并盡可能提高程序語言的簡潔性和執(zhí)行效率,故本文采用PID算法進行運動控制設計。
利用Matlab的框圖設計環(huán)境Simulink對PID進行仿真。Simulink的仿真模塊圖如圖4所示,輸入部分是一個階躍信號發(fā)生器,然后設定Kp、Ki、Kd三個參數(shù),將被控對象模型輸入系統(tǒng),最后通過示波器來查看輸出結果。
由于不同的輸入信號對應的Kp、Ki、Kd整定參數(shù)不一樣,本文選取移動距離最大1 000 mm和最小10 mm兩個值進行研究。假設電機上齒輪的直徑d為40 mm,電機位移的距離s與電機所需旋轉角度θ關系式為:
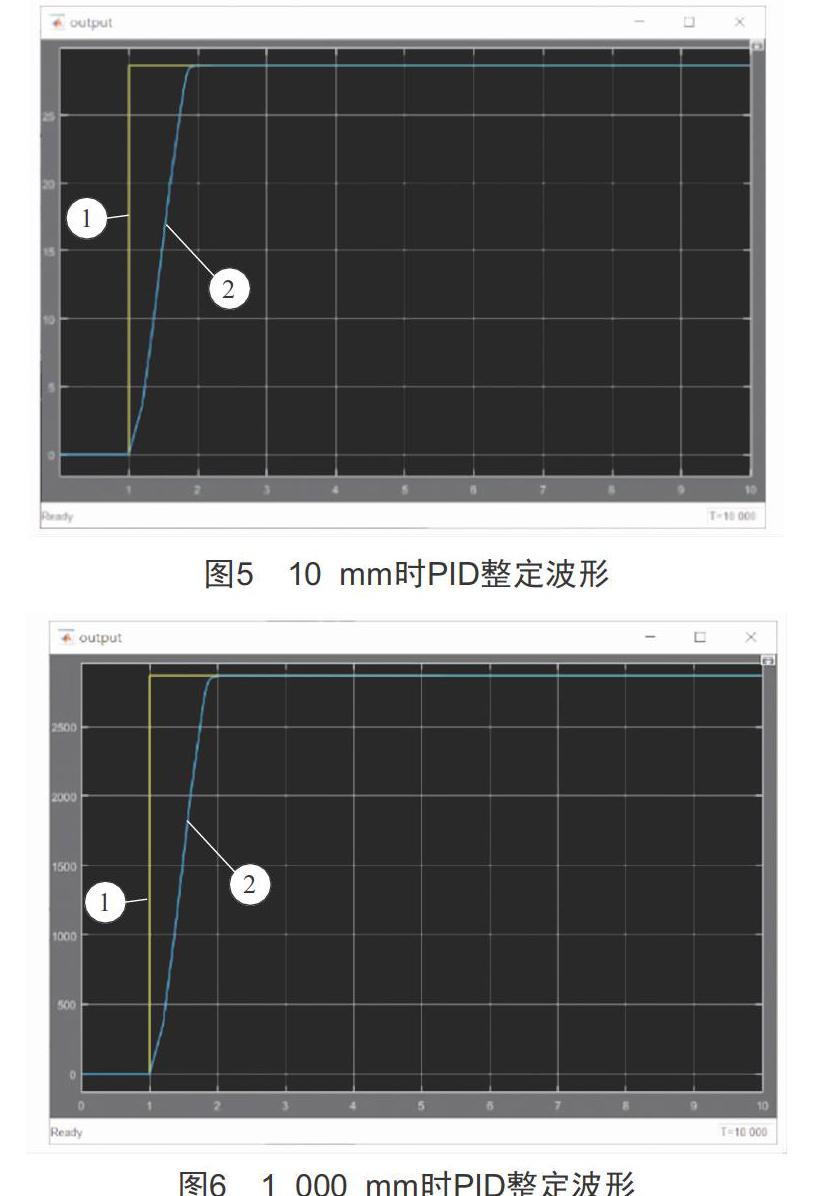
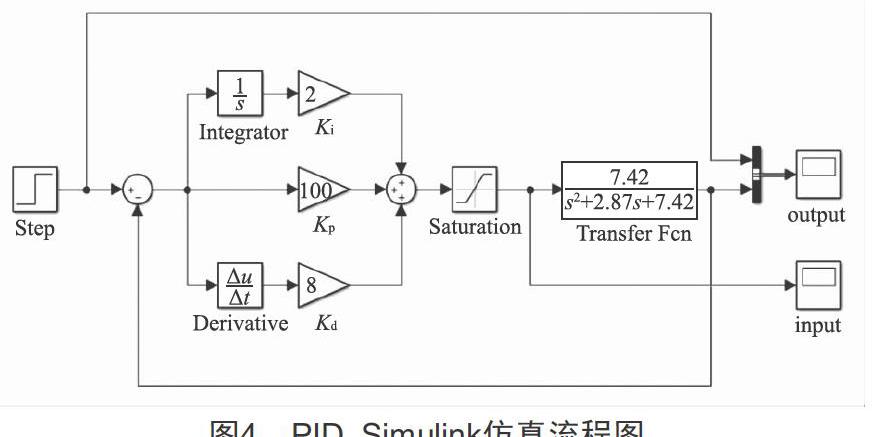
當s為最大值1 000 mm時,輸入信號θ≈2 864.789 0°;當s最小值為10 mm時,輸入信號θ≈28.647 9°。對PID參數(shù)進行整定,Kp=100,Ki=2,Kd=6,得到如圖5、圖6所示波形。
圖中1#線是輸入階躍信號,2#線是經(jīng)過PID算法調(diào)節(jié)后的輸出信號。從圖中可知,只需要非常短的響應時間就可以穩(wěn)定平滑地達到期望值,過程中沒有振蕩現(xiàn)象發(fā)生。由此可知,引入PID算法后,移栽機工作時可以控制電機達到良好的動態(tài)響應和穩(wěn)定的效果。
為確定PID控制精度,使用測量工具測量2#線,即對經(jīng)過PID調(diào)節(jié)后第4 s和第8 s的輸出信號進行測量。當電機位移距離為10 mm時,測量值分別為28.630 3°、28.631 6°;當電機位移距離為1 000 mm時,測量值分別為2 863.030 4°、2 863.163 5°。由于步進電機是按步長運動的,最小的運動距離是電機轉過一個細分步距角所前進的距離,步進電機轉過的角度必定是細分步距角的整數(shù)倍,固定步距角經(jīng)過細分后為0.45°。所以當電機位移距離為10 mm時,電機轉動角度為28.8°;當電機位移距離為1 000 mm時,電機轉動角度分別為2 862.9°、2 863.35°。
計算偏差得:當電機移動距離10 mm時,經(jīng)過PID算法調(diào)節(jié)后的輸出位置偏差率為-0.53%;當移動距離為1 000 mm時,偏差率分別為0.07%和0.005%。
通過換算公式把偏差率換算成距離:當電機定位距離為10 mm時,經(jīng)過PID算法后的偏差距離約為-0.053 1 mm;當電機定位距離為1 000 mm時,經(jīng)過PID算法后的偏差距離約為0.659 4 mm和0.502 3 mm,處于可接受范圍內(nèi)。
4? ? 結語
本文采用PLC為控制核心對溫室穴盤苗移栽控制系統(tǒng)進行了相關研究,該控制系統(tǒng)操作簡單,穩(wěn)定性高,適應能力強。本研究設計的溫室穴盤苗移栽控制系統(tǒng)實現(xiàn)了自動將穴盤苗從高密度穴盤移栽到低密度穴盤中的移栽工作,對穴盤苗自動移栽機控制系統(tǒng)設計具有一定的理論參考意義。
[參考文獻]
[1] 張振國,曹衛(wèi)彬,王僑,等.穴盤苗自動移栽機的發(fā)展現(xiàn)狀與展望[J].農(nóng)機化研究,2013,35(5):237-241.
[2] 顧文俊.夾持式成批自動取苗機構控制系統(tǒng)的設計研究[D].石河子:石河子大學,2014.
[3] 王僑,曹衛(wèi)彬,張振國.穴盤苗自動取苗機構的研究[J].農(nóng)機化研究,2012,34(11):76-78.
[4] 王僑,曹衛(wèi)彬,張振國,等.穴盤苗自動取苗機構的自適應模糊PID定位控制[J].農(nóng)業(yè)工程學報,2013,29(12):32-39.
收稿日期:2020-12-23
作者簡介:謝博文(1995—),男,湖南衡陽人,研究方向:智能檢測與控制。
通信作者:肖章(1989—),男,湖南衡陽人,講師,研究方向:智能檢測與控制。
