下肢康復機器人輔助康復訓練對腦卒中后偏癱患者下肢功能的影響
2021-04-02 03:38:38江偉豪陳霄云樊留博
中國現(xiàn)代醫(yī)生 2021年5期
江偉豪 陳霄云 樊留博

[摘要] 目的 探討下肢康復機器人輔助康復訓練對腦卒中后偏癱患者下肢功能的影響。 方法 選取2019年1—6月我院康復治療部就診的腦卒中后偏癱患者74例,隨機分為干預組與對照組,每組各37例。兩組均酌情予以控制顱內(nèi)壓、營養(yǎng)神經(jīng)細胞、基礎疾病治療及預防并發(fā)癥等基礎治療。對照組予常規(guī)康復訓練,干預組在對照組基礎上加用下肢康復機器人輔助康復訓練,兩組均干預8周。觀察并比較兩組患者干預前與干預8周后下肢肌力、運動、平衡及步行能力的變化。 結(jié)果 干預8周后,兩組患者腘繩肌和股四頭肌肌力較干預前明顯上升(P<0.05或P<0.01),且干預組上升幅度高于對照組(P<0.05);同時兩組FMA評分、BBS評分和FAC評分較干預前明顯上升(P<0.05或P<0.01),且干預組上升幅度高于對照組(P<0.05)。 結(jié)論 下肢康復機器人輔助康復訓練用于腦卒中后偏癱患者不僅可提高下肢肌力,還可促進下肢運動功能恢復,改善平衡能力和步行能力。
[關(guān)鍵詞] 腦卒中后偏癱;下肢康復機器人;下肢肌力;運動能力;平衡能力;步行能力
[Abstract] Objective To explore the effect of lower limb rehabilitation robot-assisted rehabilitation training on the lower limb function of the patients with post-stroke hemiplegia. Methods A total of 74 patients with post-stroke hemiplegia treated in the Rehabilitation Department of our hospital from January to June 2019 were selected and randomly divided into the intervention group and the control group with 37 patients in each group. Both groups were given basic treatments such as intracranial pressure control, nourishing nerve cells, treatment of basic diseases, and prevention of complications as appropriate. The control group received conventional rehabilitation training, while the intervention group received lower limb rehabilitation robot-assisted rehabilitation training on the basis of what the control group received. Both groups received interventions for 8 w. The changes of the myodynamia of lower limbs, motor, balance and walking ability before and after 8 weeks of interventions of the two groups of patients were observed and compared. Results After 8 weeks of interventions, the myodynamia of hamstring tendon and quadriceps femoris of the two groups of patients increased significantly when compared with before interventions(P<0.05 or P<0.01), and the increase in the intervention group was more significant than that in the control group(P<0.05). Meanwhile, the FMA scores, BBS scores and FAC scores in the two groups increased significantly when compared with before interventions (P<0.05 or P<0.01), and the increase in the intervention group was more significant than that in the control group(P<0.05). Conclusion The application of lower limb rehabilitation robot-assisted rehabilitation training to the patients with post-stroke hemiplegia can not only improve the myodynamia of their lower limbs, but also promote the recovery of the motor ability of their lower limbs, and ameliorate their balance and walking ability.
[Key words] Post-stroke hemiplegia; Lower limb rehabilitation robot; The myodynamia of lower limbs; Motor ability; Balance ability; Walking ability
腦卒中是中老年患者的常見病,致殘率高達80%以上,治療后往往遺留不同程度的肢體偏癱,影響患者下肢運動功能、日常工作及生活,導致其生活質(zhì)量下降[1-2]。以往對腦卒中后偏癱多采用手術(shù)治療、物理治療或藥物治療等常規(guī)手段,近期雖有一定的臨床效果,但總體效果不甚理想[3-4]。下肢康復機器人技術(shù)是近年國內(nèi)外新興的下肢步態(tài)康復技術(shù),對下肢行走起到較強的輔助作用,可提高康復訓練的質(zhì)量,加快身體的康復,用于腦卒中后偏癱患者具有一定的效果[5-6]。本研究觀察下肢康復機器人輔助康復訓練對腦卒中后偏癱患者下肢功能的影響,現(xiàn)報道如下。
1 資料與方法
1.1 一般資料
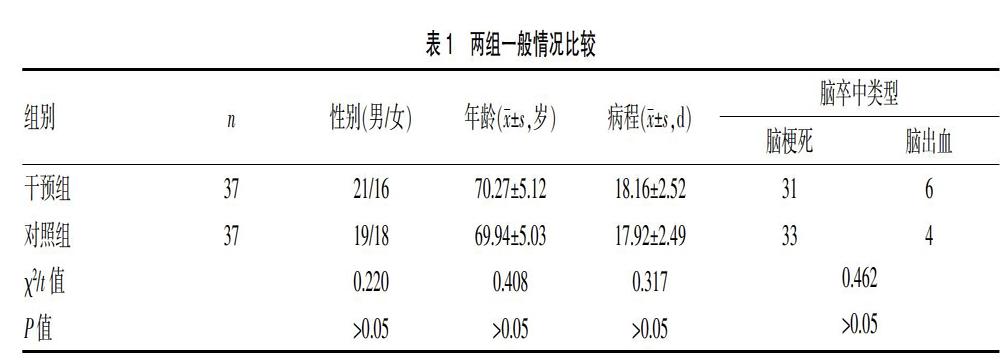
選取2019年1—6月我科就診腦卒中后偏癱患者74例。納入標準[7]:①符合腦卒中的診斷標準[8],并通過頭顱CT或MRI檢查確診;②首次發(fā)病且生命體征平穩(wěn),交流能力正常;③伴有單側(cè)肢體功能障礙(由腦卒中引起),下肢Brunnstrom分期≥Ⅲ期;④病程<6個月,年齡18~80歲。排除標準[9]:①既往存在運動功能障礙疾病者;②明顯認知、語言或交流障礙者。采用拋硬幣法分為干預組與對照組,每組各37例。兩組性別、年齡、病程和腦卒中類型比較,差異無統(tǒng)計學意義(P>0.05),具有可比性。見表1。
1.2 方法
兩組均酌情予控制顱內(nèi)壓、營養(yǎng)神經(jīng)細胞、基礎疾病治療及預防并發(fā)癥等基礎治療。對照組予常規(guī)康復訓練,包括良肢位保持、肢體被動及主動訓練、坐立位訓練,肌力強化訓練和人工輔助步行訓練等。干預組在對照組基礎上加用下肢康復機器人輔助康復訓練,采用下肢智能反饋訓練系統(tǒng)(廣州一康醫(yī)療設備實業(yè)有限公司,A1型號)輔助步行訓練,第一步:先將機器人置于0°仰臥位,將患者轉(zhuǎn)移仰臥于機器人上方。使用減重帶將其腰背固定,雙下肢用保護帶固定并確認安全。第二步:通過遙控將機器人從0°升起至90°,不同患者根據(jù)差異選取不同角度。第三步:通過電腦機器人系統(tǒng)設置下肢步行參數(shù),包括步頻、步長、步速和步行時間等,不同患者根據(jù)個體差異進行個性化訓練,30 min/次,1次/d,5 d/周。兩組均干預8周。觀察兩組干預前后下肢肌力、運動、平衡及步行能力的變化。
1.3 觀察指標
1.3.1 下肢肌力評估[3]? 采用徒手肌力檢查法評估下肢肌力,包括腘繩肌和股四頭肌肌力,以Kendall百分比法評定,分數(shù)范圍0~100分,分數(shù)與患者肌力呈正相關(guān),分數(shù)越高表示肌力越好。
1.3.2 下肢運動、平衡及步行能力評估[3]? 下肢運動功能采用簡化Fugl-Meyer運動功能量表(Fugl-meyer assessment,F(xiàn)MA)評定,共17項,每項2分,總分34分,得分越高提示下肢運動功能障礙越輕;下肢平衡能力采用Berg平衡量表(Berg balance scale,BSS)評估,包括14個動作,每項4分,總分56分。分數(shù)越高提示下肢平衡功能越好;采用功能性步行分級(Functional ambulation category,F(xiàn)AC)評估步行能力,包括6個級別,分數(shù)0~5分,分數(shù)越高提示步行能力越好。
1.4 統(tǒng)計學處理
應用SPSS 20.0統(tǒng)計學軟件處理數(shù)據(jù)。計量資料用均數(shù)±標準差(x±s)表示,采用t檢驗,計數(shù)資料用[n(%)]表示,采用χ2檢驗,P<0.05為差異有統(tǒng)計學意義。
2 結(jié)果
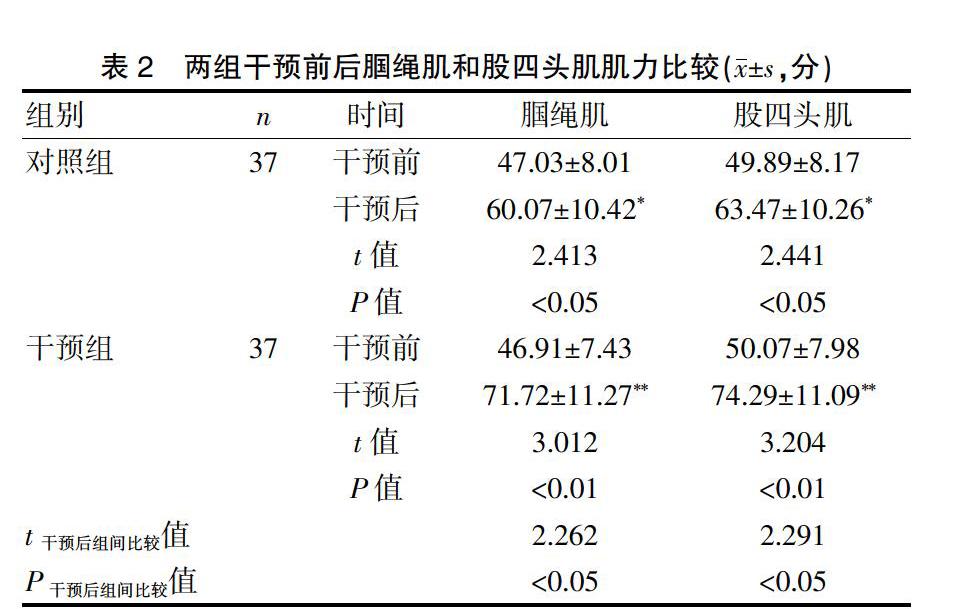
2.1 兩組干預前后腘繩肌和股四頭肌肌力比較
干預前兩組腘繩肌和股四頭肌肌力比較,差異無統(tǒng)計學意義(P>0.05)。干預8周后,兩組腘繩肌和股四頭肌肌力較干預前明顯上升(P<0.05或P<0.01),且干預組上升值高于對照組(P<0.05)。見表2。
2.2 兩組干預前后FMA評分、BBS評分和FAC評分比較
干預前兩組FMA評分、BBS評分和FAC評分比較,差異無統(tǒng)計學意義(P>0.05)。干預8周后,兩組FMA評分、BBS評分和FAC評分較干預前明顯上升(P<0.05或P<0.01),且干預組上升幅度高于對照組(P<0.05)。見表3。
3 討論
腦卒中治療后往往會遺留不同程度的神經(jīng)系統(tǒng)后遺癥,其中單側(cè)肢體運動功能偏癱較多見。腦卒中后因大腦對低級中樞的調(diào)節(jié)失去控制,干擾正常運動的傳導,產(chǎn)生異常運動模式,以下肢運動功能障礙為主,主要表現(xiàn)為下肢伸肌痙攣為主異常模式,對患者下肢運動功能的影響較明顯,主要表現(xiàn)為典型不對稱性劃圈步態(tài),患側(cè)總體的承重能力下降,嚴重影響下肢的平衡和步行功能,使得步行速度減慢,步行效率下降,進而對行走、轉(zhuǎn)移和上下樓梯等日常生活活動能力的影響較明顯[10-11]。基于大腦和神經(jīng)系統(tǒng)的可塑性,腦卒中后偏癱患者的運動功能理論上是可通過對癱瘓側(cè)肢體的刺激和反饋促進相關(guān)腦區(qū)、神經(jīng)環(huán)路的激活,從而使神經(jīng)對肌肉的控制得以恢復。以往傳統(tǒng)康復模式治療師逐級對患者髖、膝和踝關(guān)節(jié)進行訓練,不能保證患者軀干的穩(wěn)定,在一定程度上限制了骨盆和軀干的生理運動,這種缺乏系統(tǒng)有效的訓練模式,其康復治療效果往往不甚理想[12-13];尤其是對于病程時間較長或下肢肌力痙攣程度較高的患者易出現(xiàn)下肢單項運動好、綜合步行能力差的沖突。因此,腦卒中后下肢運動障礙患者更需帶有高強度系統(tǒng)性的訓練模式[14-15]。
下肢康復機器人作為近年來發(fā)展起來的一種新的運動神經(jīng)康復治療技術(shù),具有高效、系統(tǒng)、操作規(guī)范化等優(yōu)勢,已逐漸引起醫(yī)務人員的關(guān)注[16-17]。本研究對腦卒中后偏癱患者采用下肢康復機器人輔助康復訓練,下肢康復機器人具有減重裝置,可減除身體的部分負重,從而可電機帶動患者模擬正常的步態(tài)進行訓練,使重心位于身體中線,提升軀干及盆骨運動的穩(wěn)定性,刺激下肢關(guān)節(jié)肌腱肌肉的本體感受器,有利于恢復本體感覺,強化肢體感覺的輸入,逐漸營造出正確的運動模式,從而改善步行能力[18-20];訓練過程中應根據(jù)患者下肢的具體恢復情況進行逐漸減重,循序漸進地協(xié)助患者由不完全負重逐漸向完全負重過渡,實現(xiàn)負重、平衡及邁步的有機結(jié)合,改善拮抗肌-主動肌的協(xié)同運動,改善下肢運動功能[21-24]。本研究顯示,干預8周后,干預組腘繩肌和股四頭肌肌力上升值高于對照組,且干預組FMA評分、BBS評分和FAC評分上升幅度高于對照組。表明下肢康復機器人輔助康復訓練用于腦卒中后偏癱患者不僅可提升下肢肌力,而且可促進下肢運動功能恢復,改善平衡能力和步行能力。康復機器人可根據(jù)患者的功能恢復進展情況對運動模式進行調(diào)整,可操作性強,有利于保持訓練持續(xù)性和一致性,有利于患者整體運動功能的改善,提高康復療效[25-28]。
綜上所述,下肢康復機器人輔助康復訓練用于腦卒中后偏癱患者不僅可提高下肢肌力,還可促進下肢運動功能恢復,改善平衡能力和步行能力。本研究由于納入樣本數(shù)量較少,且缺乏長期隨訪觀察,尚需擴大樣本量及延長隨訪時間進行深入研究進一步完善。
[參考文獻]
[1] Kim CM,Eng JJ. The relationship of lower-extremity muscle torque to locomotor performance in people with stroke[J]. Phys Ther,2003,83(1):49-57.
[2] Tani Y,Otaka Y,Kudo M,et al. Prevalence of genu recurvatum during walking and associated Knee pain in chronic hemiplegic stroke patients:A preliminary survey[J].Journal of Stroke and Cerebrovascular Diseases,2016,25(5):1153-1157.
[3] 陳源,張繼榮.腦卒中患者步行功能障礙的康復現(xiàn)狀[J].中國康復,2017,32(1):70-73.
[4] 金挺劍,葉祥明,林堅,等.強化患側(cè)下肢負重訓練對腦卒中患者平衡與功能性步態(tài)能力的影響[J].中國康復醫(yī)學雜志,2009,24(11):995-998.
[5] 張志茹,李宇,蘆宇.下肢康復機器人訓練在腦卒中偏癱患者康復中的應用[J].臨床和實驗醫(yī)學雜志,2018, 17(4):412-415.
[6] Chang JL,Lin RY,Saul M,et al.Intensive seated robotic training of the ankle in patients with chronic stroke differentially improves gait[J]. Neurorehabilitation,2017,41(1):61-68.
[7] 路芳,朱琳,宋為群.下肢康復機器人聯(lián)合虛擬現(xiàn)實技術(shù)對腦卒中患者下肢功能的影響[J].中國康復醫(yī)學雜志,2018,33(11):1301-1306.
[8] 中華神經(jīng)科學會.各類腦血管疾病的診斷要點和腦卒中患者神經(jīng)功能評分標準[J].中華神經(jīng)科雜志,1996, 29(6):379-380.
[9] 徐金元,龔敏超,葉小菊,等.不同恢復階段腦卒中后偏癱患者下肢功能和腓神經(jīng)功能的變化情況[J].中華全科醫(yī)學,2017,15(11):1870-1872.
[10] 譚永霞,劉建國,戚曉昆.急性腦卒中患者過早下肢負重與患肢伸肌痙攣及膝過伸的關(guān)系研究[J].神經(jīng)損傷與功能重建,2012,7(6):133-135.
[11] Lee SB,Kang KY.The effects of Isokinetic Eccentric Resistance exercise for the hip joint on functional gait of stroke patients[J]. Phys Ther Sci,2013,25(9):1177-1179.
[12] Gao F,Ren Y,Roth EJ,et al.Effects of repeated ankle stretching on calf muscle-tendon and ankle biomechanical properties in stroke survivors[J]. Clin Biomech (Bristol Avon),2011,26(5):516-522.
[13] Kang CG,Chun MH,Jang MC,et al. Views of physiatrists and physical therapists on the use of gait-training robots for stroke patients[J].J Phys Ther Sci,2016,28(1):202-206.
[14] 杜玲玲,夏清.腦卒中偏癱患者膝過伸步態(tài)運動學特點分析[J].中國康復,2018,33(1):7-10.
[15] Ostwald SK,Davis S,Hersch G,et al. Evidence-based educational guidelines for stroke survivors after discharge home[J]. J Neurosci Nurs,2008,40(3):173-179,191.
[16] Erbil D,Tugba G,Murat TH,et al. Effects of robot-assisted gait training in chronic stroke patients treated by botulinum toxin:A pivotal study[J]. Physiother Res Int,2018,23(3):e1718.
[17] 劉暢,郄淑燕,王寒明,等.下肢康復機器人對腦卒中偏癱患者下肢運動功能與步行能力的效果[J].中國康復理論與實踐,2017,23(6):696-700.
[18] 胡坤,劉輝輝,張曉武.下肢智能康復機器人對腦卒中偏癱患者下肢運動功能的影響[J]. 神經(jīng)損傷與功能重建,2019,14(1):22-25.
[19] 吳李秀,余旭芳,戴夢圓,等.下肢康復機器人配合肌電生物反饋治療對腦卒中偏癱患者下肢運動功能的影響[J].中國現(xiàn)代醫(yī)生,2020,58(4):72-75.
[20] 盧建亮,陳卓銘,吳浩,等.下肢康復機器人訓練對腦卒中偏癱患者下肢運動功能的康復作用[J].中國現(xiàn)代神經(jīng)疾病雜志,2017,17(5):334-339.
[21] 李坤彬,吳志遠,吳艷芝.下肢康復機器人訓練對缺血性腦卒中患者腦功能重建影響的初步觀察[J].中風與神經(jīng)疾病雜志,2019,36(5):420-424.
[22] 華艷,陸蓉蓉,李策,等.智能助行康復機器人訓練結(jié)合偏側(cè)注意提醒對腦卒中后偏側(cè)忽略患者下肢功能的影響[J].中國康復,2018,33(5):44-416.
[23] 李宏偉,張韜,馮垚娟,等.外骨骼下肢康復機器人在腦卒中康復中的應用進展[J].中國康復理論與實踐,2017, 23(7):788-791.
[24] Coenen P,Werven G,Nunen M,et al. Robot-assisted walking vs overground walking in stroke patients:An evaluation of muscle activity[J]. Journal of Rehabilitation Medicine,2012,44(4):331-337.
[25] Kim SH,Banala SK,Brackbill EA,et al. Robot-assisted modifications of gait in healthy individuals[J]. Exp Brain Res,2010,202(4):809-824.
[26] Swinnen E,Beckwee D,Meeusen R,et al. Does robot-assisted gait rehabilitation improve balance in stroke patients? A systematic review[J]. Top Stroke Rehabil,2014, 21(2):87-100.
[27] Hsieh Y,Lin K,Wu C,et al. Predicting clinically significant changes in motor and functional outcomes after robot-Assisted stroke rehabilitation[J]. Archives of Physical Medicine and Rehabilitation,2014,95(2):316-321.
[28] 鄒龍華,楊洋,尚龍華.早期康復訓練聯(lián)合音樂放松療法對腦卒中偏癱患者亞急性期下肢功能及步行能力的影響[J].中國醫(yī)學創(chuàng)新,2018,15(32):103-106.
(收稿日期:2020-07-20)
