基于三種分析方法的PID控制規律的講授
2021-04-02 03:36:58王玲玲雷軍委
電氣電子教學學報 2021年1期
王玲玲, 雷軍委, 梁 勇
(海軍航空大學 岸防兵學院,山東 煙臺 264000)
0 引言
PID控制是控制系統中非常重要的一種控制器。在控制理論相關課程的教學中,對于PID控制所占用的篇幅比重是比較高的。一般PID控制的教學會延續表1所示的思路。

表1 PID控制的教學內容在培養方案中的體現
在“自動控制原理”課程中主要闡述的是PID控制的基本原理及其對系統性能的影響;在“計算機控制”課程中主要學習的是PID如何應用在數字系統中;在其后的“控制系統課程設計”中,則主要講授的是實際PID應用的要點以及PID參數如何整定,此時學生需要將所學的PID的相關知識真正應用在一個具體的被控對象上。通過這一系列的學習安排,希望能夠讓學員對于PID的認識形成從理論到實踐的一個完整的知識回路[1~2]。但是從實際的教學效果來看,情況卻并不盡如人意。表現在學生始終對于PID參數如何能夠影響系統性能,并沒有非常深刻地理解,究其原因有兩個方面。
首先就是在一開始學習PID控制律時,就沒有形成一個深刻的印象。很多對于PID控制的教學一上來普遍采用的都是案例+仿真的模式,這種授課模式確實最為直觀,但是對于這三種參數為什么能影響控制效果的深層次原因闡述得不夠深刻,造成學生學習時也只是停在表相,和前面的知識也無法形成聯系[3~4]。
此外,除了控制專業的學生,其他大多數專業實際上并不會學習“計算機控制”與“控制系統課程設計”,如此,在“自動控制原理”里沒有吃透PID控制律,后續又不會有新的課程學習,那么就會對控制理論中非常重要的PID控制器無法進行深入地理解和運用,最終使“自動控制原理”這門課程的工程性和實用性大打折扣[5]。
因此本文從“自動控制原理”的PID控制律的教學入手,闡述一種教學設計,使得學員通過控制律的學習,能夠將本門課所有的知識貫通下來,并對PID三個參數如何影響系統性能形成深刻地理解。
1 授課思路
在“自動控制原理”課程里,PID控制律是第六章中的內容。之前除了在第三章二階系統的性能改善里提到過比例微分控制,這是控制理論課程中第一次真正接觸到PID控制的知識,因此對于學生來說基本是一個新的知識點。因此我們的授課思路按照什么是PID?(PID參數的含義及框圖)→為什么要學習PID?(PID控制器的應用)→PID有什么作用?(PID各部分的控制規律)來依次展開,這一授課思路如圖1所示。
2 案例代入
PID控制是工程應用相當廣泛的一種控制算法,對于其學習不可避免自然是要聯系到工程實際。而且“自動控制原理”的授課內容其最大問題是抽象,學員通常難以建立理論與應用之間的聯系,因此實際上在課堂授課時,都應盡可能地選取合適的工程實例,帶著問題帶著實例進行知識點的講解。這樣學生在學完一次課后,不僅能增強學員對控制系統的直觀理解,培養其解決實際問題的能力,更能使學生切身感受到這門課程的工程性以及學習這門課程的實用性。
因此在一開始講授時,可以以某一工程背景來引入,即為了達到一定的控制效果,實際中經常采用的控制算法是PID算法,之后引入本次課的主體內容;在PID控制器的應用中,將這個引例進一步展開,去闡述為什么要學習PID;最后在第三部分內容中,通過引例中的具體被控對象,去分析PID各部分的控制規律對系統的輸出量究竟有何影響。
這里在案例中,我們選用的引例是導彈的某一次攻擊任務,之后以三代PID控制(繼電式、模擬式、數字式)在導彈中的應用來闡述其應用之廣泛,最后分析PID各個部分在導彈俯仰通道中對俯仰角的影響,如圖1所示。
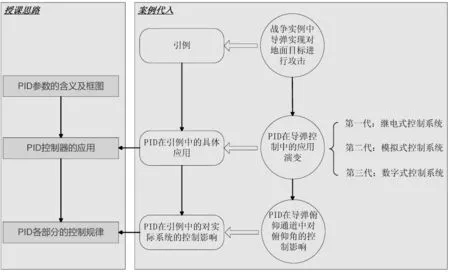
圖1 總體授課思路
3 巧妙運用三種分析方法進行講解
PID控制規律是在整門課程的第六章里,此時學生已經學完控制理論里的三種分析方法,分別是時域分析法、根軌跡法和頻域分析法。但是此時,學生往往只是會定量的計算指標或者作圖,對于如何應用這三種分析方法去分析系統,實際上并沒有太多的綜合運用的能力。另一方面,對于PID控制規律究竟如何影響控制系統性能的原因,如果只是單單從控制仿真曲線上闡明,很直觀卻不夠深刻。因此本文將這二者結合,并使用具體的被控對象,如圖2所示,通過三種分析方法的運用去深入剖析其控制規律,如圖3所示。

圖2 PID控制講解時用到的案例

圖3 綜合運用三種分析方法
3.1 比例P
在PID控制器中首先只取比例控制,并用時域法分析具體案例。通過響應曲線得出此時性能指標的不足,如圖3“比例P”這一行所示。可以分析出此時穩態性能較差,于是通過靜態誤差系數中 的3×3的表格分析原因,得出I型系統在輸入為階躍信號時穩態誤差為
知道了穩態誤差產生的原因,就可以考慮通過增大開環增益K來減小穩態誤差,但繼續仿真發現這種方式只能適當地減小誤差卻不能最終消除誤差,而且增益過大會使得動態性能變差。因此考慮通過提高系統型別的方式來消除穩態誤差,而提高系統型別即是在系統中加入積分環節,由此引出下面的積分控制。
3.2 積分I
單純的純積分環節串聯在前向通路中是否能夠可行呢?此時可以采用根軌跡分析方法,對原系統繪制根軌跡,會發現根軌跡都在左半平面,如圖3“積分I”這一行所示,因此原系統是全穩定系統。而增加了純積分環節后,相當于在原點處增加了一個開環極點,對于原根軌跡具有“排斥”作用,會將根軌跡“推到”右半平面,使得系統呈現條件穩定的狀態,即純積分環節會將本身全穩定的系統變成條件穩定系統,從而破壞了系統的穩定性。穩定性是控制系統的基本要求,破壞系統穩定性在實際系統中是不被允許的,因此實際工程系統中并沒有純積分控制。
那么如何既通過純積分提高型別,又不會破壞系統穩定性呢?此時引導學生考慮“開環附加零極點對系統根軌跡的影響”這一知識點,通過再次增加位于左半平面的零點將根軌跡“吸回”左半平面。如此,既增加位于原點的極點,又增加位于左半平面的零點,其實,這就是下面所說的比例積分控制。
3.3 比例積分PI控制
在增加了純積分的根軌跡圖上,繼續繪制增加左半平面開環零點的根軌跡,會發現只要開環零點選擇合適,則系統的穩定性得以保證。此時繼續使用時域法仿真分析,發現PI控制可以有效消除穩態誤差,但是對動態性能的改善不足。因此考慮增加微分D控制。
3.4 微分D
微分為何能夠起到改善動態性能的作用呢?可以引導學生使用頻率法,即繪制微分環節的Bode圖,如圖3“微分D”這一行所示,會發現其相角是大于零的。一個相角超前的環節串聯接在系統中,在合適的參數設置下會幫助系統提高其相角裕度,從而改善動態性能。但是微分環節對高頻噪聲具有放大作用,因此實際的工程系統中也沒有純微分控制,而是和比例合在一起形成比例微分PD控制。
3.5 比例微分PD
比例微分控制又是如何改善系統的動態性能的呢?此時分析的角度可以從時域法,也可以從頻域法。但是通常頻域法較為抽象,不如時域法直觀,而且從實際課堂授課來看,還是采用時域法進行分析效果更好。
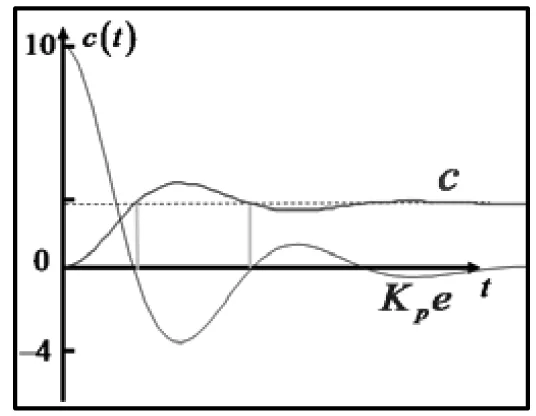
使用時域法來分析,首先分析不加微分只有比例控制的系統,此時被控對象的控制量就是偏差量乘以比例系數,即被控對象的輸出c(t)在控制量Kpe(t)的作用下不斷振蕩逼近穩態值。每當控制量Kpe(t)為零時,輸出c(t)都回到穩態值,但是由于慣性的作用,c(t)會繼續偏離穩態值直至峰值停下,因此僅有比例控制的系統其輸出c(t)要振蕩多次才能最終在穩態值上恒定下來,如圖4(a)所示。
(a)純比例控制
而對于比例微分PD控制,此時被控對象的控制量除了有誤差的比例信號Kpe(t)外,還有誤差的導數信號Kde(t),二者的疊加即為控制量的曲線,如圖4(b)所示。由于誤差信號e(t)是不斷振蕩減小的過程,因此對其微分的e(t)曲線必然要更負,從而Kpe(t)+Kde(t)的曲線比單純的Kpe(t)曲線要靠下。從響應圖4(b)中可以看出,每當輸出c(t)還沒有真正回到穩態值時,控制量信號在某一時刻就已經為零了,相當于在每次到達穩態之前,就已經提前踩了一腳剎車,而從控制量信號為零的時刻之后,至峰值時刻,是慣性的作用產生的,因此系統的輸出不會偏離穩態值太遠,而且整個調節過程也很快就能結束。
由此可以得到比例微分控制改善系統動態性能的根本原因是誤差的微分作用使得系統有提前控制的效果。
3.6 比例積分微分PID控制
通過前述分析,PI可以改善穩態性能,PD可以改善動態性能,則二者結合,既可以改善穩態性能,也可以改善動態性能。最后通過時域分析得知,只要選擇合適的參數就可以有效改善系統的動態和穩態性能,獲得滿足系統指標的響應曲線,如圖3“比例積分微分PID”這一行所示。而如何選擇參數,則是后續課程中需要介紹的知識點。
至此,通過不斷的發現問題解決問題,并綜合運用三種分析方法,時域法、根軌跡法、頻域法,對PID控制中各項參數對系統性能的影響做了深入地討論,同時還綜合運用了課程的相關內容。
4 與后續課程的聯系
在講完PID控制規律后,后續就是講解串聯校正中的串聯超前校正、串聯滯后校正以及串聯超前滯后校正。很多時候學生都是認為這兩大部分內容是完全脫節的,實際上還是沒有明白這其中的聯系。因此在PID控制規律內容之后,或者串聯校正內容之前,通過引入的方式,闡述這兩大塊內容的聯系。
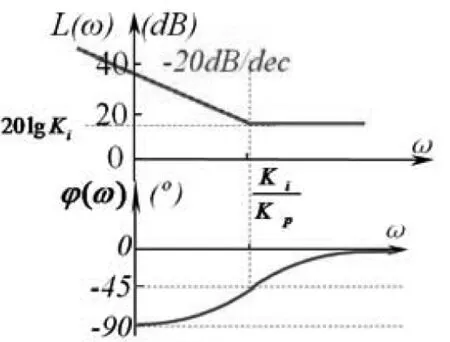
其中,PI控制器傳遞函數可寫為
繪制伯德圖如圖5(a)所示,可以看出其相角小于零,所以PI控制就是一種滯后校正。
同理,PD控制器傳遞函數可寫為
繪制伯德圖5(b)所示,可以看出相角大于零,所以PD控制就是一種超前校正。而PID控制二者皆有之,為一種滯后超前校正。
(a)比例積分控制器
5 結語
本文運用“自動控制原理”中三種分析方法,以發現問題解決問題的思路,通過具體案例講解PID控制的基本含義、應用和控制規律。(王玲玲等文)
這部分的授課內容在多個班次進行實驗,取得的效果非常好。本專業的學生對這一部分的內容學習起來更有連貫性,掌握得也更為透徹。而且該授課內容在校內經多位專家的指導點評,并多次獲得系級、院級一等獎,具有一定的推廣意義和參考價值。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
云南化工(2021年6期)2021-12-21 07:31:42
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
內蒙古教育(2021年20期)2021-03-08 01:09:14
北京測繪(2020年12期)2020-12-29 01:33:58
計算機教育(2020年5期)2020-07-24 08:53:38
裝備制造技術(2019年12期)2019-12-25 03:06:46
家庭影院技術(2019年11期)2019-12-09 09:14:30
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
