固定式割膠機器人割膠誤差分析與精度控制
2021-04-02 06:55:34高可可孫江宏
農(nóng)業(yè)工程學(xué)報 2021年2期
關(guān)鍵詞:測量
高可可,孫江宏,高 鋒,焦 健
(北京信息科技大學(xué)機電工程學(xué)院,北京 100192)
0 引言
橡膠作為工業(yè)設(shè)備和生活用品的制造原料,在工業(yè)生產(chǎn)、醫(yī)療衛(wèi)生和日常生活中有著舉足輕重的作用,是重要經(jīng)濟支柱[1-3]。切割橡膠是獲取天然橡膠的中心環(huán)節(jié)和關(guān)鍵技術(shù)環(huán)節(jié)[4-5],割膠方法是收獲天然橡膠的關(guān)鍵,而割膠機械直接決定割膠效率、傷樹程度、作業(yè)強度和橡膠產(chǎn)量[6-8]。目前市場上還是以傳統(tǒng)的人工割膠方式為主,對勞動者的體能和技術(shù)要求較高,且生產(chǎn)效率低、工作模式復(fù)雜和勞動投入高,已無法滿足橡膠產(chǎn)業(yè)的發(fā)展需要[9-10],因此,采用自動化割膠設(shè)備獲取天然橡膠將是解決橡膠行業(yè)困境的首選方法[11]。
已有的割膠設(shè)備主要有電動割膠刀、移動式割膠機器人和固定式割膠機器人。其中印度和日本主要應(yīng)用為電動割膠刀[12-15]。但電動割膠刀需人工手持操作,并未完全代替人工操作。吳思敏等[16-18]針對移動式割膠機器人進行了研究,但受橡膠林間環(huán)境和圖像識別誤差等因素的影響,移動式割膠機器人的割膠精度低,且再次割膠時無法同上次割膠刀痕完全吻合,造成割膠軌跡雜亂甚至損傷橡膠樹結(jié)構(gòu)。
固定式割膠機器人采用固定架和導(dǎo)軌將設(shè)備固定于樹干上,相對于移動式割膠機器人具有結(jié)構(gòu)堅固和設(shè)備維護簡單便利等優(yōu)勢,可忽略橡膠林間環(huán)境以及圖像識別等,實現(xiàn)快速、精準割膠。艾哈邁德等發(fā)明一種捆綁式全自動智能割膠機[19-20],由割膠機械動力、刀頭、導(dǎo)軌與芯片程序控制5部分組成,使用固定架和導(dǎo)軌將機器架于樹上,但該機器使用成本遠超過橡膠的收益,未能在生產(chǎn)上大面積推廣應(yīng)用。張春龍等[21]針對固定式割膠器械研制了一種激光測距式割膠試驗平臺,該平臺采用不同路徑激光采點進行測距,通過控制三坐標平臺聯(lián)動,實現(xiàn)割刀按激光測定的空間曲線路徑運動。但該割膠實驗平臺的研究沒有解決因樹干彎曲造成的割膠設(shè)備安裝偏心問題。許振昆等[22-23]發(fā)明了一種固定式割膠機,該割膠機械由割膠機械動力、刀頭、導(dǎo)軌與芯片程序控制系統(tǒng)等部分組成,采用固定架和導(dǎo)軌將割膠機架于樹上,可完全替代人工。但該機器人采用定值深度割膠,且無割膠精度控制。
結(jié)合國內(nèi)橡膠種植與收獲特點[24],本文研制了一種固定式割膠機器人,該機器人采用高分子材料制作加工。利用超聲波測量技術(shù),將先掃描后切割的控制方式應(yīng)用于橡膠精準切割,通過控制3個方向的電機實現(xiàn)刀具按規(guī)劃的空間螺旋曲線路徑運動,具有割膠精度高、整機質(zhì)量輕和集成度高等特點。
1 固定式割膠機器人結(jié)構(gòu)與工作原理
1.1 總體結(jié)構(gòu)
固定式割膠機器人結(jié)構(gòu)如圖1所示,該機器人主要由夾持機構(gòu)、割膠工作臺、組合滾柱絲杠副和測量限位模塊等組成。其中割膠工作臺由運動轉(zhuǎn)軸、刀具夾持結(jié)構(gòu)、刀具、電容式傳感器和測距傳感器組成,除割膠工作臺外,割膠機支撐結(jié)構(gòu)采用高分子材料制作,整機質(zhì)量為33 kg。在橡膠樹產(chǎn)膠期內(nèi)將割膠機器人固定在樹干上,通過固定腳座進行定位和無損夾持,期間不進行拆卸,機器人可循環(huán)切割。
割膠機器人夾持結(jié)構(gòu)采用三點定位工作原理,通過上下2個齒圈架上各3個橡膠固定腳座進行夾持,可根據(jù)不同樹徑調(diào)節(jié)其距機器人軸線的距離。橡膠固定腳座夾持面為硬質(zhì)橡膠,夾持面受力后變?yōu)榛⌒危菇佑|面積和摩擦力增大,保證夾持和運行過程中穩(wěn)定。
割膠機器人夾持固定在橡膠樹干上后,通過控制圓周方向和上下方向的電機速度V,把直線運動和圓周運動合成為空間螺旋運動,實現(xiàn)刀具按規(guī)劃的空間螺旋線路徑運動。其中圓周方向運動利用步進電機輸出軸與齒輪連接,通過齒輪嚙合使傳動軸轉(zhuǎn)動,通過傳動軸下端的齒輪與軌道齒圈嚙合完成圓周運動;沿樹干方向上下運動的電機通過滾珠絲杠傳動力矩和轉(zhuǎn)速,滾珠絲杠有效運動行程為200 mm,因刀具運動空間限制,在一個切割周期內(nèi)可控制刀具對橡膠樹切割180次。通過滾珠絲杠將電機回轉(zhuǎn)運動轉(zhuǎn)化為刀具的直線運動,具有精度高、效率高和運動可逆等特點。
1.2 割膠軌跡規(guī)劃
割膠軌跡決定割膠質(zhì)量且直接影響割面的連續(xù)性與割深準確性。固定式割膠機器人的割膠運動通過圓周方向和沿樹干上下方向的運動軌跡組合而成,控制刀具路徑為螺旋線,形成自右下到左上的空間螺旋割線。如圖2所示,將橡膠樹干簡化成標準圓柱體,切割樹皮時,當?shù)毒咴趫A周方向運動距離為2 πR時,其在上下方向運動距離為P,螺旋角為θ,則tanθ=P/(2πR)。當切割螺旋角θ一定時,刀具在2個方向運動距離之比為定值。設(shè)刀具上下運動的線速度為V1,圓周運動的線速度為V2,則在相同時間內(nèi),V1/V2=tanθ。在切割過程中,控制兩電機按定比值tanθ進行運動,即可得到切割螺旋線。
2 割膠誤差分析
2.1 誤差構(gòu)成與測量
固定式割膠機器人的割膠軌跡通過圓周方向電機和沿樹干的上下方向電機配合運動,控制刀具路徑為螺旋線,形成自右下到左上的空間螺旋割線。但由于橡膠樹形狀并非標準圓柱形,在實際切割橡膠樹時會產(chǎn)生安裝誤差和測量誤差,進而產(chǎn)生切割誤差。其中安裝誤差是由于樹干彎曲造成的割膠機器人與橡膠樹干安裝偏心而產(chǎn)生的。測量誤差由超聲波傳感器與刀尖之間的橫向距離引起,割膠機器人固定到橡膠樹干上時,超聲波傳感器安裝位置位于樹干徑向方向,刀具刀柄與超聲波傳感器平行安裝,因超聲波傳感器中心與刀尖之間存在橫向間距,造成刀尖沒有正對樹干徑向方向,導(dǎo)致傳感器測得的距樹皮的距離并非刀具刀尖距樹皮的實際距離。
為減小安裝誤差,應(yīng)盡量選取近似標準圓柱體的樹干部分固定割膠機器人。對于測量誤差,通過測量模塊中的超聲波傳感器預(yù)先掃描樹干輪廓,在切割入刀點測算刀尖與樹皮之間的實際距離,配合進刀深度控制刀具進給量;當?shù)都庠M樹皮之后,實時監(jiān)測刀具刀尖與刀具原點的距離,并與刀具刀尖需要到達的目標位置作比較,控制刀具進給量。
圖3為割膠機器人測量模塊。其中超聲波傳感器為翰西公司生產(chǎn)的M18型,頻率為200 kHz,測量精度0.1 mm,重復(fù)測量精度0.1%,用來測量與樹皮之間的距離,其測量范圍為50~1000 mm,小于50 mm為測量盲區(qū),輸出4~20 mA的模擬量信號。為使控制系統(tǒng)能檢測到因測量距離變化而產(chǎn)生的電流變化,同時避免盲區(qū)檢測失效以保證其測量效果,設(shè)置其有效測量范圍為60~120 mm。電容式傳感器為翰西公司生產(chǎn)的PNP常開型,用來測量刀具和超聲波傳感器與刀具原點的距離,并實時監(jiān)測刀具進給量,其工作電壓為DC10~30 V,可感應(yīng)距離為1.5 mm。
測距傳感器主要包括超聲波傳感器和激光傳感器2種。激光傳感器在工作時為單個激光點測距,在掃描橡膠樹圍時進行逐點測量,雖然其測量精度很高,但因樹皮微小凸起或凹陷及樹皮上膠液沾附等因素影響,單個激光點的測量結(jié)果偶然性較大。而超聲波傳感器具有重復(fù)測量精度,且測量范圍為扇形區(qū)域平均值,可降低偶然性提高測量準確度。在割膠過程中,由于流出的膠液與橡膠樹干有顏色差異,要求測距傳感器不能受顏色影響,超聲波傳感器相對于激光傳感器對光線和被測對象的顏色等沒有要求,具有方向性好、測量方便快速以及可靠性高等優(yōu)點[25-26],因此本文選用超聲波傳感器作為測量模塊的測距傳感器進行樹干輪廓掃描,測量超聲波傳感器距樹干的距離。
2.2 測量誤差模型建立
將橡膠樹橫截面簡化為標準圓形,樹干半徑為R,超聲波傳感器位于樹干徑向方向,割膠方向為順時針。割膠誤差模型如圖4所示。
圖5為超聲波傳感器安裝位置與刀具尺寸,因超聲波傳感器安裝位置位于樹干徑向方向,刀具刀柄與超聲波傳感器平行,同時因刀具刀柄具有一定角度,導(dǎo)致超聲波傳感器前端中心與刀具刀尖有橫向距離S5,又因樹干為圓柱形而產(chǎn)生測量誤差S3。
根據(jù)超聲波傳感器測得的距離,得到刀尖至樹皮的實際距離,通過PID控制算法控制刀具進給量完成橡膠切割。由圖4可知,刀尖至樹皮的實際距離為
根據(jù)NY/T1088-2006[27],橡膠樹樹圍達到500 mm時才可進行割膠作業(yè)。樹圍為500 mm時,樹干半徑R約為79.6 mm,本文結(jié)構(gòu)設(shè)計中S5=9 mm,則由式(2)計算可得S3=0.5 mm。
當樹干樹圍增大時測量誤差S3隨之增大,因此測量誤差不可忽略。
在割膠作業(yè)時,設(shè)定刀尖扎進樹皮的深度為h,在割膠機割膠作業(yè)過程中超聲波傳感器測量樹徑時每秒輸出2個距離值,故超聲波傳感器掃描樹徑完成后形成系列采集數(shù)據(jù)點。以刀具原點為參考點,以作為刀尖移動的第一個目標位置值,以S4作為刀尖當前位置值,控制系統(tǒng)將刀尖當前位置值與目標位置值作差,則刀具初始進給量為進刀時間為1 s。
根據(jù)誤差模型,通過超聲波傳感器測量數(shù)據(jù)測算刀具刀尖與樹皮間的實際距離,進而實現(xiàn)對刀具進給量的精準控制。
3 割膠試驗
為驗證割膠機器人割膠作業(yè)準確性、實用性與可靠性,于2019年7月、12月在海南儋州市橡膠林進行割膠作業(yè)試驗,7月共切割不同樹圍的橡膠樹10棵,持續(xù)時間7 d;12月共切割不同樹圍的橡膠樹6棵,持續(xù)時間5 d。試驗裝置由割膠機支撐切割裝置與控制柜組成,如圖6所示。試驗橡膠樹樹圍530~630 mm,切割位置離地約1000 mm。根據(jù)人工割膠經(jīng)驗,在切割螺旋角25°~30°、切割深度4~6 mm,有效切割時間20~30 s條件下進行多組試驗,采用觸控屏進行割膠操作以及參數(shù)設(shè)置。
割膠機采用直流24 V鋰電池供電,按照2 d割1刀,可為割膠機提供1周的穩(wěn)定電源輸入。動力輸入采用兩相八線的步進電機,其步距角為1.8°,額定電流為3 A,工作電壓為10~48 V,靜轉(zhuǎn)矩為2.1 Nm,步進電機驅(qū)動器為ZD-2HD542型全數(shù)字兩相步進驅(qū)動器,采用差分式接口電路,可適用差分信號,內(nèi)置高速光電耦合器,采用低速串聯(lián)接法與電機相連。利用JY-DZI-5A型直流電流變送器進行刀具電機工作時的電流采集,其輸入電流為DC0~5 A,可輸出電流范圍為DC4~20 mA。
橡膠產(chǎn)量受切割時間、切割螺旋角、切割深度以及橡膠樹生長狀況等多種因素決定,根據(jù)實際割膠作業(yè)要求,各試驗因素設(shè)置如表1所示。每組試驗3次重復(fù)。

表1 試驗因素水平表 Table 1 Table of test factors level
從以下3個方面對割膠效果進行評價:
1)切割過程中是否有傷樹情況。切割過程中不可損傷橡膠樹,否則容易引起割面霉爛和割線干涸等割面病害,還會使橡膠樹生瘤,影響橡膠產(chǎn)量。
2)切割結(jié)束后膠液是否外流。膠液外流是指膠乳未沿割線流入膠杯而從割線溢出,當割線斜度小或割面不均勻時,膠乳會從割線較平處或割面有毛刺的地方流到膠杯以外。因此從是否出現(xiàn)膠液外流現(xiàn)象可判斷割線斜度(切割螺旋角)是否合適。
3)切割結(jié)束后是否完全出膠。出膠情況是評價割膠機器人優(yōu)劣的重要依據(jù),當割膠深度太淺時會導(dǎo)致不出膠或不完全出膠,割膠深度太深則會損傷橡膠樹干。
根據(jù)影響橡膠產(chǎn)量的主要因素進行試驗方案設(shè)計,固定某個影響因素的值,分析其余2個因素間的交互作用對割膠效果的影響。根據(jù)現(xiàn)場試驗情況,割深為4~5 mm時不出膠或不完全出膠,5.5 mm時正常流膠,6 mm時出現(xiàn)傷樹情況,故割深其他水平試驗沒有繼續(xù)進行。試驗方案及結(jié)果如表2所示。
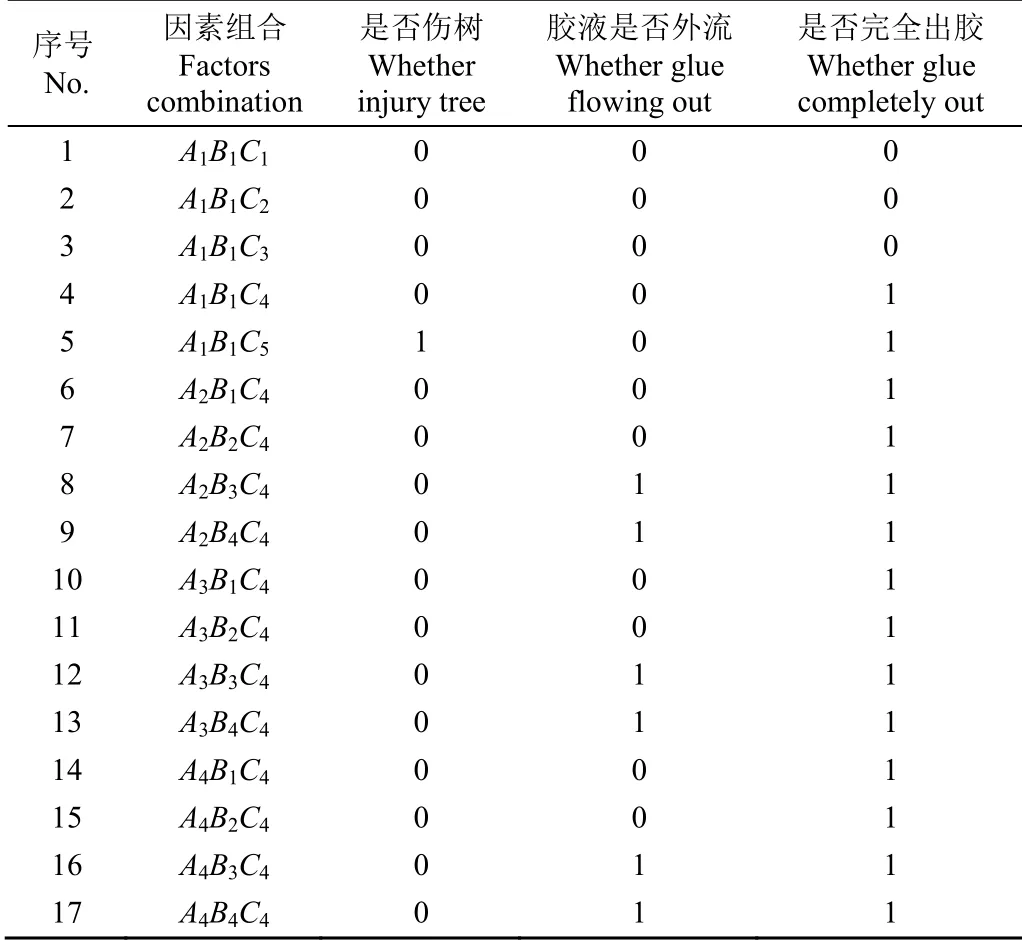
表2 試驗方案與結(jié)果 Table 2 Test scheme and results
由表2可知,螺旋角為25°~30°時膠液均沿割線流入膠杯,未出現(xiàn)膠乳溢出情況;切割時間對割膠效果無影響。
以樹圍565 mm橡膠樹的割膠試驗為例,共割膠3次,每次割膠持續(xù)時間大致相同,約為78 s。割膠時切割螺旋角為25°,切深為5.5 mm,切割后可正常順暢流膠。割膠軌跡及切割樹屑如圖7所示。割膠機器人工作時超聲波測量數(shù)據(jù)與刀具電流如圖8、圖9所示。
對比圖8、圖9可知,割膠機器人在13:36:44時開始工作,在13:36:58時開始對樹徑進行掃描至13:37:22時結(jié)束,在13:37:31時開始切割樹皮,至13:37:52時切割結(jié)束。割膠機器人從開始切割樹皮至切割結(jié)束,3次割膠有效切割時間均為22 s,而傳統(tǒng)人工割膠有效切割時間為1 min[28],相比于傳統(tǒng)人工割膠,割膠效率提高了63%。
割膠生產(chǎn)中,在一定割線長度和割膠頻率下,合理的耗皮量是橡膠樹穩(wěn)產(chǎn)高產(chǎn)的關(guān)鍵因素[29]。因在切割過程中橡膠樹皮會發(fā)生塑性變形,切割耗皮量在一定范圍內(nèi)變化。本割膠機器人設(shè)計耗皮量為0.9~1.2 mm,切割結(jié)束后用游標卡尺測量的3次平均耗皮量為1.1 mm,滿足割膠技術(shù)規(guī)程要求。
提取刀具切割樹皮時電流變化如圖10所示。
由圖10可知,13:37:31時刀具電流為1247 mA,此時刀尖開始切入樹皮,由于刀具進給量較大,為使刀尖快速達到目標位置,所以刀具電流較大;13:37:52時刀具電流為1141 mA,此時刀具快速退回。切割樹皮時刀具電流在940~1040 mA變化,電流變化點即為進刀或退刀點。
因割膠機器人使用蓄電池供電,頻繁進退刀會增加蓄電池損耗,工作周期內(nèi)供電量減少。且頻繁進退刀會增加刀具與樹干之間的沖擊力,加劇刀具磨損,增加電機功率損耗,降低割膠效率,同時也會降低機器壽命。為減少頻繁進退刀,提高切割效率,延長機器使用壽命,所以控制刀尖扎進樹皮的深度在一定范圍內(nèi)進行橡膠切割以減少進退刀次數(shù)。
割膠時刀尖扎進樹皮的深度須根據(jù)橡膠樹的樹皮結(jié)構(gòu)和有關(guān)割膠技術(shù)規(guī)定確定。天然橡膠樹的樹皮厚度約為7 mm,其樹皮結(jié)構(gòu)主要包括粗皮、沙皮外層、沙皮內(nèi)層、黃皮和水囊皮,其中粗皮起保護內(nèi)部組織的作用;沙皮層因含有大量的石細胞而成為樹皮較硬部分,約占樹皮總厚度的70%,沙皮層的乳管大部分被石細胞擠裂,產(chǎn)膠能力低;黃皮層位于沙皮內(nèi)層內(nèi)側(cè),厚度約為1 mm,膠乳多,石細胞很少或沒有,且是乳管分布最密集、排列最整齊、連通性最好和產(chǎn)膠機能最旺盛的皮層,是產(chǎn)膠的主要部位;水囊皮位于黃皮內(nèi)側(cè),一般厚度小于1 mm,有輸導(dǎo)功能的韌皮部,含有細嫩乳管和縱向輸導(dǎo)營養(yǎng)物質(zhì)的篩管,切割后流出清液。在割膠操作中,為了提高產(chǎn)膠率,割破黃皮組織且不損傷水囊皮。
根據(jù)NY/T1088-2006,割膠深度是指刀片割去樹皮的內(nèi)切口與形成層的距離(mm),該距離按照橡膠樹的品種和生長年限來確定[30]。對于常規(guī)割膠,割膠深度要在1.2~1.8 mm范圍內(nèi)。
根據(jù)橡膠樹樹皮厚度和對割膠深度的規(guī)定,本文設(shè)計刀尖切割樹皮的深度范圍為5.2~5.8 mm,滿足割膠要求。在5.2~5.8 mm切割深度范圍內(nèi)切割橡膠時的刀具電流與5.5 mm定值深度切割時的刀具電流對比如圖11所示,通過電流對比可知,在一定深度范圍內(nèi)割膠和定值深度割膠的進退刀次數(shù)的不同。在5.2~5.8 mm切割深度范圍內(nèi)割膠時,刀具電流變化次數(shù)即進退刀次數(shù)由定值深度割膠的50次下降到32次,減少36%,刀具電流變化幅度最大縮減4.11%,可減少蓄電池和電機功率損耗,提高割膠效率,延長割膠機器人使用壽命。
4 結(jié)論
本文設(shè)計的固定式割膠機器人在已有研究基礎(chǔ)上,利用超聲波測量技術(shù),將先掃描后切割的割膠控制方式應(yīng)用于割膠精準控制。使用超聲波傳感器預(yù)先掃描樹徑后割膠,提高了測量準確性和切割精度。
建立測量誤差控制模型,利用PID控制算法控制刀具進給量,降低了切割誤差。該割膠機器人有效切割時間為22 s,相比于傳統(tǒng)人工割膠,割膠效率提高了63%;切割螺旋角為25°~30°;割膠耗皮量為1.1 mm;該機器人采用在一定深度范圍內(nèi)割膠,割膠深度范圍為5.2~5.8 mm,在此切割深度范圍內(nèi)切割橡膠,刀具進退刀次數(shù)減少36%,刀具電流變化幅度最大縮減4.11%。并通過對機器人的試驗測試,驗證了固定式割膠機器人的整機結(jié)構(gòu)、誤差分析方法和切割控制方式具有準確性、實用性與可靠性。
猜你喜歡
小學(xué)科學(xué)(學(xué)生版)(2021年5期)2021-07-22 02:40:06
中學(xué)生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學(xué)少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學(xué)少年(2017年2期)2017-04-26 21:58:43
中學(xué)生數(shù)理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學(xué)低年級版)(2015年4期)2015-04-29 00:00:00