果園避障除草機研究現狀與分析
2021-03-31 15:16:46老福興張秀花張江紅
河北農機 2021年3期
老福興 張秀花 張江紅
1、河北農業大學機電工程學院 2、河北農業大學園藝學院
引言
隨著農業現代化的發展,現代化果園已經普及到全國各地。現代化果園有著高壟、窄株、行寬矩形的栽植方式,這種栽培方式有利于機械化作業[1]。此外,由于現代化果園的發展,國內的除草作業經歷了由化學除草到機械式除草的轉變[2]。然而傳統的除草機械在現代化果園中進行除草作業時,無法清除果樹樹盤附近的雜草,只能清除行間的除草,會導致果樹株間雜草生長泛濫,降低除草效率。為解決果園中不便于機械化除草的情況,國內果園株間除草機械的研發越來越多。果園株間除草機可對果樹株間和行間雜草進行清除,作業效率高,除草徹底。本文主要是介紹了果園避障除草機國內外研究現狀及其技術要點,提出了現階段我國避障除草機存在的問題。
1 果園避障除草機研究現狀
1.1 國外研究現狀
國外于20世紀50年代已經開始對機械除草技術進行研究,到目前為止,國外的除草技術已發展成熟,其自動化程度、功能已達到很高的水平[3]。國外早期除草機僅僅是用于庭院作業,而后L型旋耕刀的研制,使得除草機從庭院轉向田間作業[4]。此時期的除草機械只是局限于行間除草,直至20世紀80年代初,荷蘭Wageningen Agricultural University的Kouwenhoven等開始研究運用起壟鋤進行行間和株間除草[5]。而后丹麥的Melander[6]等研究了一種對刷式除草機,如圖1所示。該除草機利用豎直旋轉的刷子將作物周圍的雜草去除。波蘭農機生產企業JAGODA JPS生產了一款ZOFIA除草機,其是一款果園人工協作株間除草機,通過人工操作手柄除草裝置與果樹的相對位置實現避障,從而達到避障除草作業[7]。
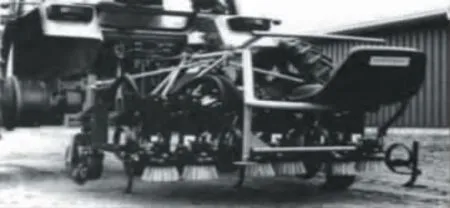
圖1 對刷式除草機
丹麥的Noremark等研制了一種基于GPS導航技術實現自動避障的除草機。該除草機通過GPS實時控制拖拉機與除草鏟的橫向位移和縱向位移,能夠有效避開作物,保證在株間除草[5]。
意大利AEDES公司和ARRIZZA公司生產的果園株間自動避障除草機,該機械除草裝置多樣,一臺拖拉機可與多種除草裝置配合使用,可實現單邊和雙邊株間進行除草[7]。
1.2 國內研究現狀
我國最早對除草機械的研究始于20世紀60年代,與國外相比,我國機械除草技術的研究落后,且發展時間短,設備落后。經過多年的研究與試驗,在吸收國外先進技術的基礎上,結合國內的研究技術,先后研制多用途復合型作業機械,如煙臺市農業機械科學研究所研發的3ZP-1600型蘋果中耕除草機,其結構示意圖如圖2所示。該除草機具有自動避讓功能與寬幅可調鏟式松土的除草性能,可實現果園中的行內株間雜草清除與松土保墑作業[8]。

圖2 3ZP-1600型蘋果中耕除草機結構
新疆石河子大學的張斌[9]研制了一種果園自動讓樹除草機,該除草機的一側安裝有讓樹除草裝置,此裝置可以有效地避開樹干清除果樹株間雜草,大大提高了果園除草效率。
石河子大學機械電氣工程學院朱站偉[10]等針對新疆果園種植模式,研究出來一款與輪式拖拉機配套使用的果園避障除草機。安裝在除草機機架主梁兩端的避障除草裝置在液壓系統的控制下完成對果樹株間雜草的清除作業。
中國農業大學工學院徐麗明[11]等針對清除葡萄株間雜草而設計的一種新型籬架式栽培葡萄株間自動避障除草機。在除草機右側邊板上安裝有株間除草裝置,機械感應觸桿碰觸到植株時,液壓系統開始作用,使得安裝有除草刀的斜拉桿發生一定的轉動,使得除草刀進入相鄰的作物之間進行除草實現避障除草作業。
2 避障除草機技術要點
2.1 除草機避障檢測裝置
果園株間除草避障裝置分為接觸式避障裝置和非接觸式避障裝置。接觸式避障的避障檢測裝置是由機械感應觸桿接觸障礙物來實現避障檢測,并且由液壓控制系統控制實現避障作業。如石河子大學的羅進軍、王斌[12]等研發的果園避障旋耕機是通過接觸式避障檢測裝置來對障礙物進行檢測,該割草機上的機械觸桿接觸果樹或障礙物后,避障系統開始工作。
非接觸式避障的檢測裝置是由機器視覺技術、傳感器檢測技術和GPS導航定位等技術對障礙物進行無接觸避障檢測。石河子大學機械電氣工程學院的何義川[13]等設計了一種葡萄園避障除草機,此除草機采用傳感器對障礙物進行檢測避障。除草機在進行除草作業時,傳感器會檢測前方是否有障礙物,當檢測到障礙物時,避障系統會發生作用,除草機進行株間避障除草。蘭州理工大學機電工程學院的賈耀文[14]設計的多功能果園避障除草機器人的避障裝置由激光掃描儀、電動推桿等部件組成。該除草機器人避障檢測裝置采用無接觸式激光掃描儀無接觸式檢測障礙物,當激光掃描儀檢測到樹干障礙物,激光掃描儀控制器會發出指令給電動推桿,從而實現避障。
針對超聲波對果樹無接觸式監測避障,主要是利用超聲波的發射,回波接收及處理的方式對目標障礙物進行檢測[15]。如山東師范大學的侯東偉[16]設計的一種除草機自動行走避障裝置,該裝置通過STM32發出PWN信號從而驅動超聲波換能器發出超聲波信號,經過回波接收及處理,保證對前方障礙物的檢測。
2.2 避障裝置的控制系統
果園避障除草機的避障裝置是通過除草機控制系統的控制來實現避障,當避障裝置上的檢測裝置檢測到障礙物時,會反饋給控制系統做出反應從而實現避障效果。如中國農業大學工學院徐麗明[11]等針對清除葡萄株間雜草而設計的一種新型籬架式栽培葡萄株間自動避障除草機。其通過液壓系統控制除草機避障裝置實現避障作業,當機械感應觸桿接觸到植株時,會引起液壓系統發生作用,控制液壓缸的伸縮,從而實現避障效果[17]。
非接觸式避障一般是通過已完成編程的Arduino單片機或其他編程軟件作為避障除草機控制系統對躲避障礙物操作進行控制[18]。蘭州理工大學機電工程學院的許杰設計的新型果園除草機器人是通過Arduino編程的方式,將各個硬件部分驅動起來。當系統工作時,障礙物檢測模塊控制口發出一個高電平信號,定時器開始計時,信號波碰到障礙物后返回接收口,此時接收口接收的信號為低電平信號,然后通過讀取定時器的值,計算出至障礙物的距離。當距離等于設定的安全函數值時,檢測模塊發出數字信號到報警器,報警器發出聲音報警,此時,作業人員通過遠程操控除草機完成避障作業[19]。
3 結論與展望
通過對國內外自動果園避障除草機研究現狀的對比發現,我國對果園自動避障除草機的研究較晚,技術上不成熟,大多數采用接觸式避障方式,在除草過程中對果樹的損失較為嚴重。因此,在避障方式上迫切需要融入創新性、先進性的技術。
基于對果園避障除草機的技術要點的分析,歸納出我國國內缺乏智能監測避障裝置的智能化果園除草機械,缺少運用超聲波避障監測、紅外避障技術、視頻識別避障等避障監測技術。為此,我國應積極開展新型超聲傳感器的研制并應用于避障除草技術上,加強果園除草機械向高智能化、自動化水平轉型發展。在控制系統上運用Arduino Mega2560單片機、STM32F103單片機、PLC可編程序控制器、ROS功能包等作為控制器,控制避障監測裝置的運行,實現除草機械的智能化操作。
此外,還需要吸收借鑒國外果園除草機械先進技術,加強創新性發展,實現現代化果園種植模式與機械除草技術協同發展。
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
當代工人(2020年8期)2020-05-25 09:07:38
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
故事大王(2016年7期)2016-09-22 17:30:08
科技知識動漫(2016年8期)2016-07-29 20:40:09
海峽科技與產業(2016年3期)2016-05-17 04:32:12
兒童故事畫報·發現號趣味百科(2015年12期)2016-01-25 00:41:49