邊緣保持濾波的遙感影像多特征聯合分類
2021-03-30 08:12:12曹海春
遙感信息 2021年1期
曹海春
(山西工程職業學院,太原 030031)
0 引言
隨著近年來我國航天技術、計算機技術的快速發展,影像的空間分辨率不斷提高,大量衛星影像被用于國土資源調查、地理國情監測、國土規劃、搶險救災等領域。
隨著影像分辨率的提高,影像上地物目標的表達變得更加豐富,細節特征突出,加大了精細目標識別分類的優勢,但也帶來了相同地物目標光譜差異變大,增加了地物不可分性。同時,不同地物目標出現相似性增強,導致不同地物的光譜相似性增大。空間分辨率的提高必然導致局部相同地物的信息冗余,增加數據處理的計算量和復雜程度。較高的空間分辨率增加相鄰地物邊緣微小差別的分辨能力,同時也可能帶來“海量數據災難”,導致地物邊界分辨模糊、地物分類精度下降等問題。因此,構建適用高空間分辨率的分類器是遙感影像分類的重點。集成學習[1]、模糊神經網絡(fuzzy neural network,FNN)[2]、支持向量機(support vector machine,SVM)[3]、極限學習機(extreme learning machine,ELM)[4]等影像分類算法的提出和應用促進了高分辨率遙感影像分類的發展。其中ELM分類器在極快的模型學習訓練過程中提供良好的泛化性能,有效緩解“海量數據災難”等影響,且能夠在小樣本、地物分布復雜多變的高空間分辨率遙感影像上提高影像的分類精度,在高分辨率遙感影像數據分類領域應用越來越廣泛。此外,高空間分辨率遙感影像上局部地物像元并非無序排列、相互獨立的光譜特征向量,局部像元往往屬于同一地物,具有相似的特性[5]。將光譜特征與空間特征結合作為極限學習機的輸入,進行快速學習產生極限學習機的隱含輸出層,構建光譜特征與空間特征結合的遙感影像分類模型,進而提高分類的精度和穩定性[6]。楚恒等[7]提出多特征多核極限學習機(multi-kernel extreme learning maching,Multi-kernel ELM),采用多核ELM分類器從不同多特征樣本數據進行映射,充分表達地物的空間特征-光譜信息。王明常等[8]提出利用極限學習機分類器對影像的光譜特征進行分類,驗證該分類器在GF-2影像上的可行性。張成坤等[9]提出光譜-空間聯合特征,構建高光譜影像的特征表達,以提高影像的分類精度,但缺少對影像紋理特征及典型地物對應的典型指數的考慮。王傳立等[10]提出利用多核極限學習機進行遙感影像林地信息提取,通過將多核理論與多特征結合實現林地信息的有效提取。上述方法是將不同類型的影像特征以不同的融合方式引入到極限學習機中,獲得較好的分類結果,但都缺少對高分辨率影像局部細節信息增加導致邊緣區影像不可分的研究。
針對高空間分辨率影像在分類時存在的“海量數據災難”“椒鹽現象”、地物邊緣不可分性增強現象,結合相鄰像元間存在較強的光譜相似性,利用多特征結合技術與邊緣保持濾波(edge-preserving filtering,EPF)技術,提出邊緣保持濾波的高分辨率多遙感影像多特征聯合的分類方法。通過植被特征、影像對比度特征、影像空間特征及影像紋理特征的提取,輔助光譜特征進行影像信息的有效表達。首先,訓練多核極限學習機分類器獲得每個像素的初始分類概率;然后,對由所有像素初始分類概率組成的分類概率圖進行邊緣保持濾波;最后,由濾波后分類概率圖對應值的大小確定像素點的類別。
1 邊緣保持濾波
高空間分辨率遙感影像在數據的采集、傳輸過程中,受到大氣中細小顆粒的影響,通常會存在一定量的噪聲,導致相同地物的光譜曲線存在一定的波譜差異。對小樣本訓練的極限學習分類器提高了高分辨率遙感影像分類結果的精度。通過有效的空間濾波可以緩解地物“同物異譜”“同譜異物”現象,消除噪聲對影像分類的影響。雙邊濾波、引導濾波是提取影像邊緣空間約束因子信息,同時保持邊緣平滑的濾波算法。
1.1 聯合雙邊濾波
聯合雙邊濾波器是一種對影像像素灰度相似性與局部空間距離進行綜合表達的濾波方法,通過引入灰度信息與空域信息,達到去噪保邊效果。基本數學原理可以表示為式(1)、式(2)。
(1)
(2)
式中:i表示影像空間wi的位置;Ii表示影像i像素


(3)
(4)
(5)
由式(4)、式(5)可知,局部區域影像wi內的像素點,對空間相似的區域,該濾波器能夠有效地平滑空間值;對于不同地物的邊界區域,該區域像素空間相似性較小,對應的相似性權重wi,j較小,減少了因不同地物邊界帶來的非噪聲的影響。因而,采用聯合雙邊濾波器能有效地保留地物的邊界信息同時去除噪聲信息的干擾。
1.2 引導濾波
影像可以表示為一個二維的信號,通過引入一個線性的引導濾波器,該濾波函數可以在二維窗口上進行輸入與輸出。濾波函數可以表示為式(6)。
oi=akIi+bk,?i∈wk
(6)
式中:wi為影像空間域k的局部區域;ak、bk為滿足線性濾波函數的系數;Ii為影像像素值;oi為經過引導濾波的輸出值。對線性引導濾波器進行求導可以得到:?Oi=ai?Ii,獲得輸入影像的梯度乘以一個常數。因此,引導濾波具有保存邊緣的效果。引導濾波系數ak、bk通過影像輸出值與真實值p間差距平方和最小為目標函數進行求解,即
(7)
(8)
(9)
式中:|w|為局部區域影像wi的像素個數。引導濾波器與雙邊濾波器相比具有更好的邊緣保持能力。
2 基于邊緣保持濾波的高分辨率遙感影像多特征聯合分類
2.1 多特征提取
高分辨率遙感影像包含豐富的影像信息,采用常規的光譜信息進行影像分類容易造成地物分類精度較差的問題。通過引入影像的植被指數、紋理信息、影像對比度等信息能夠有效提高影像的分類精度。影像的對比度是光學影像一種常見的基本特征,反映地物目標與背景的差異。利用局部對比度AC算法提取影像的對比度特征,考慮了影像感知單元與局部空間區域的對比關系,避免對比度影像整體偏亮或偏暗現象[11]。遙感影像上普遍包含大量的植被區域,因此植被區域提取結果的好壞直接影響影像整體分類的結果。利用影像的近紅波段和紅外波段間的關系通過加減乘除運算突出影像上的植被信息、弱化非植被信息,有效地提取植被的覆蓋程度與生長狀況,較為常用的是歸一化植被指數[12]。高分辨率遙感影像上地物局部細節信息豐富,采用圓形的局部二值模型能夠有效減弱噪聲的影響,提取影像上排列規則、細微的地物信息[13]。因此,采用局部對比度、歸一化植被指數、局部二值模型等多種特征作為光譜特征的補充,為后續極限學習機分類的訓練提供有效的信息支撐。
2.2 極限學習機初始分類概率圖
為了充分利用影像的光譜特征、紋理特征及成熟的特征指數等信息,將2.1節提取的特征進行串聯處理獲取特征向量fn,n為對應像素樣本號。對所有的樣本進行多特征的提取、排列,構成樣本的特征矩陣F,F=[f1,f2,…,fN],N為隨機選取的樣本數量。隨機抽取m個樣本,構成子特征樣本矩陣F(indexk,:),將此特征矩陣作為第k分類器的輸入,利用極限學習機對樣本子類訓練,輸入層與隱層間的權值WK采用式(10)計算獲取,Bk偏值矢量采用式(11)計算獲取。
WK=2*R(L,size(indexk,1))-1
(10)
Bk=R(L,1)
(11)

Hk=(G(Wk*F(indexk,:)+Bk))T
(12)
利用式(12),通過輸入樣本與對應的類別,計算獲取中間層的權重矩陣WK,進而獲得第k個弱分類器classifierk對應的分類參數{Wk,Bk,indexk,βk,G}。通過提取影像的多種特征獲取特征向量f,輸入弱分類器classifierk,得到一個分類向量Sk。
2.3 邊緣保持濾波的高分辨率影像分類
針對高空間分辨率影像在分類時存在的“海量數據災難”“椒鹽現象”、地物邊緣不可分性增強現象,利用高分辨率遙感影像信息豐富、相鄰像素空間影像局部區域內具有較強的相似性,本文提出邊緣保持濾波的高分辨遙感影像多特征融合的分類方法,通過影像多種特征信息的提取降低“海量數據災難”的影響,結合邊緣保持濾波算法減弱局部相似影像信息,突出相鄰地物邊界信息。算法流程見圖1。
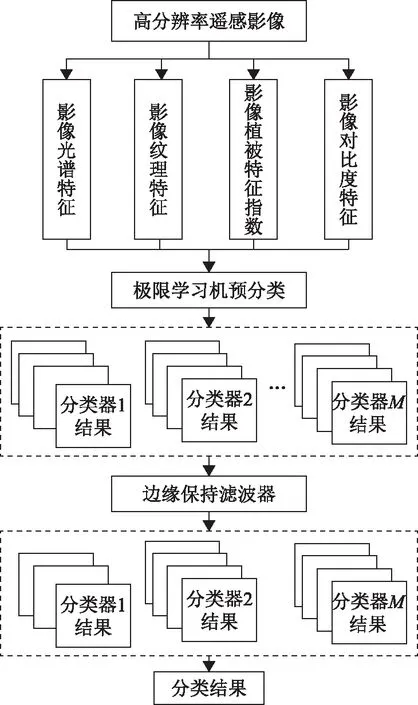
圖1 邊緣保持濾波的遙感影像多特征聯合分類流程圖
在高分辨率遙感影像上,影像局部區域存在大量的相似性地物,僅依靠光譜特征很難區分不同地物信息,通過對影像的局部對比度、歸一化植被指數、局部二值模型特征的提取可有效補充影像光譜特征信息,充分發揮多種特征的優勢,更好地體現不同地物的差別。

(13)
式中:Wi,j為邊緣保持濾波器輸出權值。聯合雙邊濾波器和引導濾波器的輸出權值如式(7)、式(8)、式(9)所示。
每個弱分類器以濾波后像素對應的概率值最大的索引j為目標類別,如式(14)所示。
label(k)=argmaxj∈[1,2,…,c]{sk(j)}
(14)
然后,將M個弱分類器的所有分類結果{lable(k)}k=1,2,…,M進行直方圖分類統計{bin(j)}j=1,2,…,M,采取投票表決的方法估算像元屬于的類別,如式(15)所示。
(15)
3 實驗仿真
為了驗證本文提出分類方法的可行性,采用2組典型區域的高分二號衛星影像進行實驗。
本文采用的實驗數據集為武漢大學計算視覺與攝影測量研究組發布的高分遙感影像數據集(GaoFen image dataset,GID)。該數據集收集60多個不同城市的150幅高質量的高分二號衛星影像,覆蓋面積超過50 000 km2。在數據內部隨機裁剪1 000像素×1 000像素的影像塊作為訓練數據集,共選取5塊,其中4塊作為樣本集、1塊作為檢驗數據進行實驗。為了進一步驗證算法的有效性,采用某地區的2組高分二號衛星進行實驗驗證。
將本文算法與SVM和Multi-kernel ELM、EPF算法進行對比。通過每類的分類精度、平均分類精度、總體精度、Kappa系數、耗時等多個指標進行評價,通過20次重復實驗的平均精度作為算法的性能評價。
3.1 GID數據集測試
在GID數據集上進行測試,實驗結果如表1所示,其中圖2(a)至圖2(d)為樣本集,圖2(e)為檢驗數據。
1)在聯合雙邊濾波器中,σS與σω2個參數對影像的分類精度影響較大。提取多種特征組合的影像濾波參考影像,取σω=0.2。探討參數σS對多特征組合影像分類精度的影響。圖3(a)表明分類精度隨著σS值的增加先快速增加后慢慢降低。分類精度在σS=3時取最大,取該值探討σω對多特征組合影像分類精度的影響。圖3(b)表明分類精度隨著σω值的增加先增加后趨于穩定,當σω=0.2時影像分類精度最大,為93.36%。

圖2 GID數據集

表1 GID數據不同分類方法分類精度

圖3 雙邊濾波器參數對分類精度的影響
2)在引導濾波器中,ω與ε2個參數對分類精度影像較大,采用與聯合雙邊濾波的分類器相似的分析方法,如圖4所示,ω=3與ε=10-1時影像分類精度最高,為93.65%。在3.2節高分二號影像上進行分類時,采用上述參數進行處理。

圖4 引導濾波器參數對分類精度的影響
3)采用相同的樣本數據對比SVM算法、Multi-kernel ELM算法、EPF算法及本文方法進行實驗,其中SVM算法組合影像的光譜特征與紋理特征,Multi-kernel ELM是基于光譜特征、紋理特征、空間特征等多種特征結合的多核ELM分類器進行分類,EPF采用雙邊濾波與光譜特征結合的方式進行分類。從分類結果精度可以看出,本文提出的邊緣保持濾波的多特征聯合的分類方法分類結果明顯優于SVM算法、ELM算法、EPF算法,分類精度最高為93.65%。文中采用多種特征聯合的方式,避免對海量遙感數據進行分類處理,提高算法的整體效率,減少分類過程的復雜計算,所以整體耗時較少。
3.2 高分二號數據測試
利用高分二號數據集樣本數據訓練獲取聯合雙邊濾波器、引導濾波器中對分類結果影像較大的參數。充分利用高分辨遙感影像的多種特征,采用極限學習機對樣本子類訓練,獲得多個弱分類器,對每個弱分類器計算的概率影像進行邊緣保持濾波處理以減少“椒鹽噪聲”的影像。本文方法的高分二號影像的分類結果見圖5(b)、圖5(d),各類地物的分類精度見表2。

圖5 分類結果圖

表2 高分二號數據不同分類方法分類精度
從目視效果上看,本文方法獲取的分類結果避免“椒鹽噪聲”的影像,地物提取相對比較完整;影像上的道路基本提取出來,且道路邊界比較清晰;但也存在部分裸地錯分成了建筑物與道路的現象,但整體分類結果具有高度的空間一致性,能很好地區分各類地物的差異,分類效果較好,既能保證相鄰地物類別的一致性,也能夠清晰地保留不同地物的邊界信息,能夠準確、可靠地反映不同地物的實際分布情況。
表2為不同方法對高分二號2組數據的分類精度。通過表2可知,由于Multi-kernel ELM算法充分利用光譜特征、紋理特征、空間特征等多種特征并結合了多核ELM進行分類,分類精度相比SVM算法有了較大的提高;本文提出的分類方法取得較為理想的分類結果,并且在分類時間上較SVM與Multi-kernel ELM方法有明顯優勢。從分類精度可以看出,本文方法分類效果優于其他方法,實現了大多數地物的準確劃分。通過多種影像特征的聯合,既能充分利用影像的多種特征信息,也能降低極限學習機的計算復雜度,節省了大量時間成本,同時獲得了良好的分類結果。
4 結束語
本文提出邊緣保持濾波的高分辨率遙感影像多特征聯合的分類方法,聯合影像的光譜特征、紋理特征、植被指數特征、對比度特征有效補充影像光譜特征信息,充分發揮多種特征的優勢,更好地體現不同地物的差別,降低運算量。對聯合特征采用極限學習機分類器獲得多個弱分類器的初始分類概率圖,并利用多特征聯合影像構建邊緣保持濾波器,處理預分類器獲得初始概率影像,通過投票表決的方法確定每個像素的類別。該方法能有效解決高分辨率影像在分類時存在的“海量數據災難”“椒鹽現象”、地物邊緣不可分性增強現象,分類結果能夠突出地物邊界、真實可靠地反映地物分布的實際情況。
猜你喜歡
數學小靈通·3-4年級(2024年2期)2024-05-15 02:02:28
數學小靈通(1-2年級)(2021年4期)2021-06-09 06:25:56
大眾健康(2021年6期)2021-06-08 19:30:06
世界科學技術-中醫藥現代化(2020年2期)2020-07-25 02:05:36
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當代陜西(2019年10期)2019-06-03 10:12:04
中學生數理化·七年級數學人教版(2019年4期)2019-05-20 10:06:32
中學生數理化·七年級數學人教版(2018年6期)2018-06-26 08:36:06
初中生世界·七年級(2017年9期)2017-10-13 22:27:46
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54