基于微分器的移動輪式機器人滑模變結構控制
2021-03-28 11:13:12徐訓?林巧梅
河南科技 2021年34期
關鍵詞:移動機器人
徐訓?林巧梅
摘 要:移動機器人具有非線性、強耦合等特點,因此在軌跡跟蹤控制中很難取得理想的控制效果。根據對移動機器人運動學方程的分析,提出一種基于微分器的滑模變結構控制輪式機器人的軌跡跟蹤方法。結合雙閉環系統,通過內環系統快速跟蹤外環系統控制的穩定性,引入微分器對輸入信號進行處理,能夠有效消除系統的噪聲干擾,從而使系統在滑模面獲得更好的魯棒性,具有較快的跟蹤性能。仿真結果顯示,該算法動態性能良好,即使在有噪聲干擾的情況下也能夠實現較好的軌跡跟蹤效果,提高了輪式機器人的控
制效果。
關鍵詞:微分器;滑模控制;移動機器人
中圖分類號:TP242 文獻標識碼:A 文章編號:1003-5168(2021)34-00-03
Sliding Mode Variable Structure Control of Mobile Wheeled Robot Based on Differentiator
XU Xun LIN Qiaomei
(Department of Engineering, Huizhou Vocational College of Engineering, Huizhou? Guangdong 516023)
Absrtact: Mobile robot has the characteristics of nonlinear and strong coupling, so it is difficult to obtain ideal
control effect in trajectory tracking control. According to the analysis of the kinematic equation of mobile robot, a trajectory tracking method of sliding mode variable structure control wheeled robot based on differentiator is proposed. In this paper, the stability of the control system is achieved by fast tracking the outer loop system through the inner loop system. The differentiator is introduced to process the input signal, which can eliminate the noise interference of the system. The sliding surface obtains better robustness, and the system has fast tracking performance. The simulation results show that the dynamic performance of the algorithm is good, even if there is noise interference, it can achieve good trajectory tracking effect, and improve the control effect of wheeled robot.
Keywords: differentiator;sliding mode control;mobile robot
移動輪式機器人通常通過移動完成一些特定的任務[1],在地雷勘測、餐飲配送小車、無人機駕駛等情境中都有其身影。移動機器人有多種分類,最常見的移動機器人主要依靠輪子進行移動[2],這種機器人也被稱為無人駕駛小車。以輪式機器人為例,該機器人共有4個輪子,分為2個驅動輪和2個從動輪。2個從動輪提供支撐力,不需要進行控制;兩個驅動輪各由一個電機進行控制,當兩個電機的轉速不同時,兩個驅動輪之間就會產生差動[3],從而實現輪式機器人的轉彎。因此,采用滑模變結構控制對輪式機器人移動軌跡進行跟蹤,滑模變結構控制是一種常用于非線性系統的控制方法,具有較強的魯棒性。LU X Y[4]等為具有4個麥克納姆輪的全向移動機器人設計了一種自適應滑模控制器來跟蹤軌跡。考慮到基于麥克納姆輪的全向移動機器人的動力學模型存在不確定性和外部干擾,提出了一種神經網絡自適應滑模控制(Neural Network Adaptive Sliding Mode Control,NNASMC)策略,將徑向基函數(Radial Basis Function,RBF)神經網絡自適應控制方法和滑模控制方法相結合。文獻[5]結合反演設計和快速終端滑模的控制思想,將滑模面設計成非線性函數,使得滑模面誤差可以在指定時間T內收斂到0,設計了非完整機器人全局快速軌跡跟蹤控制。文獻[6]基于后退方法設計了一種滑模變結構的切換函數,消除了滑模系統本身的抖振特性,實現了系統的全局穩定性。文獻[7]采用雙冪次趨近律設計了滑模軌跡跟蹤的線速度和角速度控制器,使得系統趨近滑模面和遠離滑模面時的穩定性增強,系統軌跡跟蹤誤差快速收斂至0,實現了移動機器人對期望軌跡的快速跟蹤。文獻[8]提出了一種全局穩定定理與指數趨近律相結合的滑模控制方法,指數趨近率可以增大系統趨近滑模面的速度,能夠有效抑制系統的抖振現象。根據輪式機器人動力學模型,結合內外環控制的特點,由外環系統產生信號,通過內環系統跟蹤外環系統產生的信號來保證閉環系統的穩定性。結合微分器能消除外部噪聲的特點,設計了基于微分器的滑模變結構控制器,且根據Lyapunov理論證明了該方法具有全局穩定性。仿真結果顯示,該方法魯棒性強,進一步驗證了系統的正確性和有效性。
1 移動機器人運動學模型
移動機器人的驅動系統一般由驅動輪和從動輪組成,從動輪僅提供支撐力和轉向作用,不帶驅動作用,因此選取兩個同軸的驅動輪進行研究。移動機器人的狀態由兩個驅動輪的軸中點N表示,用θ表示航向角。令p=[x y θ],q=[v w],其中(x, y)表示機器人的位置,θ為移動機器人前進方向與x軸的夾角,v和w分別表示移動機器人的線速度和角速度。通過設計控制率q=[v w]實現對位置(x, y)的跟蹤,并求解θ。假設驅動輪與地面間不存在打滑現象,即只有純滾動動作,則移動機器人運動學方程可表示為:
2 滑模控制器設計
針對驅動系統,利用滑模控制是一種有效方法。本系統由內環系統和外環系統一起構成控制系統,位置子系統為外環,姿態子系統為內環。外環子系統產生指令信號θ,并傳遞給內環系統,內環系統則對這個指令信號進行跟蹤。因此,先設計位置控制率v,實現x跟蹤x,y跟蹤y,取理想軌跡[x y],則跟蹤誤差方程為:
綜上,基于姿態控制率的滑模變結構控制是穩定的。
式(9)中,為了使中間指令θd求導簡單,簡化計算,因此采用二階微分器求導θ:
式中:n(t)為待微分的輸入信號;x表示信號跟蹤;x是一階導數的估算值。令初始值x(0)=0,x(0)=0。由于該微分器由積分鏈式結構組成,當系統存在信號干擾時,噪聲只會出現在微分器的最后一層,通過對微分器的最后一層進行積分能夠有效消除噪聲的干擾[9-10]。
3 試驗結果及仿真分析
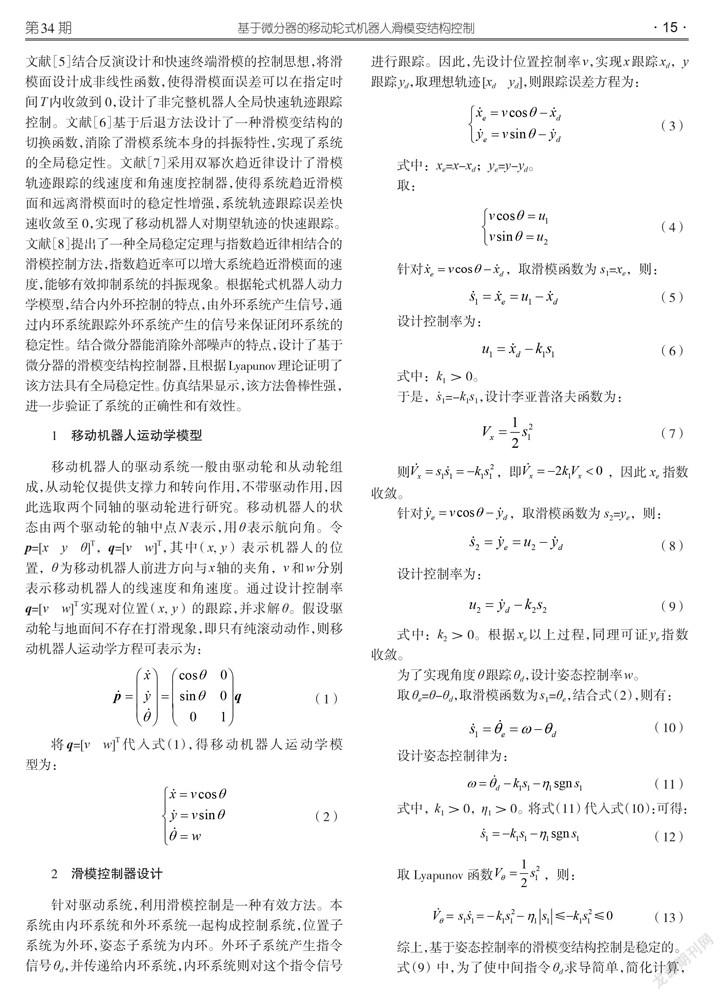
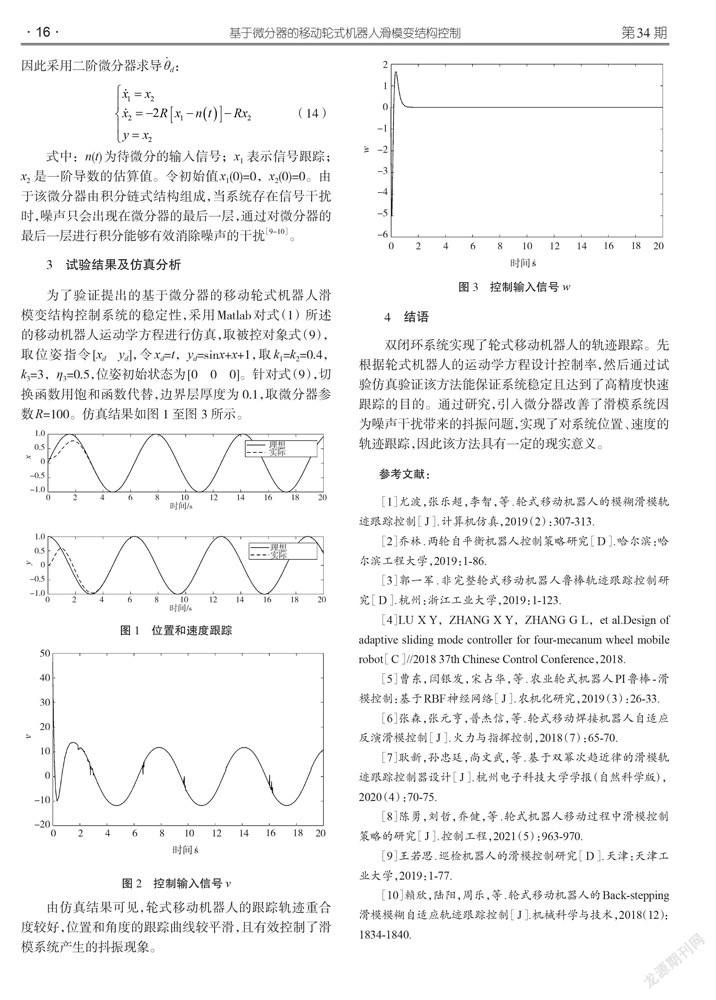
為了驗證提出的基于微分器的移動輪式機器人滑模變結構控制系統的穩定性,采用Matlab對式(1)所述的移動機器人運動學方程進行仿真,取被控對象式(9),取位姿指令[x y],令x=t,y=sinx+x+1,取k=k=0.4,k=3,η=0.5,位姿初始狀態為[0 0 0]。針對式(9),切換函數用飽和函數代替,邊界層厚度為0.1,取微分器參數R=100。仿真結果如圖1至圖3所示。
由仿真結果可見,輪式移動機器人的跟蹤軌跡重合度較好,位置和角度的跟蹤曲線較平滑,且有效控制了滑模系統產生的抖振現象。
4 結語
雙閉環系統實現了輪式移動機器人的軌跡跟蹤。先根據輪式機器人的運動學方程設計控制率,然后通過試驗仿真驗證該方法能保證系統穩定且達到了高精度快速跟蹤的目的。通過研究,引入微分器改善了滑模系統因為噪聲干擾帶來的抖振問題,實現了對系統位置、速度的軌跡跟蹤,因此該方法具有一定的現實意義。
參考文獻:
[1]尤波,張樂超,李智,等.輪式移動機器人的模糊滑模軌跡跟蹤控制[J].計算機仿真,2019(2):307-313.
[2]喬林.兩輪自平衡機器人控制策略研究[D].哈爾濱:哈爾濱工程大學,2019:1-86.
[3]郭一軍.非完整輪式移動機器人魯棒軌跡跟蹤控制研究[D].杭州:浙江工業大學,2019:1-123.
[4]LU X Y,ZHANG X Y,ZHANG G L,et al.Design of adaptive sliding mode controller for four-mecanum wheel mobile robot[C]//2018 37th Chinese Control Conference,2018.
[5]曹東,閆銀發,宋占華,等.農業輪式機器人PI魯棒-滑模控制:基于RBF神經網絡[J].農機化研究,2019(3):26-33.
[6]張森,張元亨,普杰信,等.輪式移動焊接機器人自適應反演滑模控制[J].火力與指揮控制,2018(7):65-70.
[7]耿新,孫忠廷,尚文武,等.基于雙冪次趨近律的滑模軌跡跟蹤控制器設計[J].杭州電子科技大學學報(自然科學版),2020(4):70-75.
[8]陳勇,劉哲,喬健,等.輪式機器人移動過程中滑模控制策略的研究[J].控制工程,2021(5):963-970.
[9]王若思.巡檢機器人的滑模控制研究[D].天津:天津工業大學,2019:1-77.
[10]賴欣,陸陽,周樂,等.輪式移動機器人的Back-stepping滑模模糊自適應軌跡跟蹤控制[J].機械科學與技術,2018(12):1834-1840.
猜你喜歡
北京航空航天大學學報(2022年6期)2022-07-02 01:59:12
四川輕化工大學學報(自然科學版)(2021年3期)2021-08-30 06:37:02
中國慣性技術學報(2019年3期)2019-10-15 07:21:02
電子測試(2018年15期)2018-09-26 06:01:34
制造技術與機床(2017年3期)2017-06-23 08:11:21
智能系統學報(2015年4期)2015-12-27 09:38:35
機電產品開發與創新(2014年5期)2014-03-11 16:42:32
鄭州大學學報(理學版)(2014年3期)2014-03-01 04:21:09
中國海洋大學學報(自然科學版)(2014年8期)2014-02-28 12:21:31
中國海洋大學學報(自然科學版)(2014年7期)2014-02-28 12:21:19