伸縮臂履帶起重機操控性提升研究
2021-03-27 11:37:02彭繼文權哲奎葉俊峰董照祥魏玉蘭
建筑機械化 2021年3期
彭繼文,權哲奎,葉俊峰,董照祥,魏玉蘭
(1.浙江三一裝備有限公司,浙江 湖州 313000;2.湖州師范學院工學院,浙江 湖州 313000)
1 引言
履帶起重機是一種由底座、轉臺、臂架、履帶以及發動機等組成的起重機械。履帶起重機可以用于多種場合,例如物料的起吊,裝卸和安裝等作業。我國的機械行業自新中國成立以來高速發展了幾十年,如今已步入了發展平穩期。以履帶起重機為例,國內外誕生了許多知名品牌,如國內的三一、徐工和中聯,國外的利勃海爾、格魯夫等。目前國內外相關企業之間的競爭很激烈,行業需求和市場空間有限,企業提高市場份額,提高競爭力的唯一方法就是提高產品的質量,全面提升產品性能[1]。
伴隨著工程應用的普及和使用經驗的積累,消費者在購買起重機時不僅僅關注“拆、裝、運、吊”等關鍵指標,還會關注如快速響應、平穩啟停、毫米級微動、動力流暢等滿足特定工況的操作需求。與國際知名品牌的起重機相比,我國的起重機在關鍵指標上的差距日益縮小,但對于“快、暢、穩、準”等細節指標仍處于認知階段,需要長期的積累和改善。
本文基于三一206A 型伸縮臂履帶起重機,著眼于操控方面的細節指標,采用精益的電液匹配方法,實現電氣系統、液壓系統以及動力系統的優良匹配,全面提升履帶起重機的操控性能,實現了履帶起重機在“快、準、穩、暢”4 個指標上的操作需求。
2 操控性提升
根據主機特點與操作要求,確認操作性模型,進行整機硬件測試。
2.1 整機硬件測試,建立關聯影響
本文對元件特性進行測試的方法是:結合整機的主要元件、發動機、主泵、主閥、制動器控制閥組、馬達等元件特性測試得出的結果,制定控制方案,保證操控性指標的實現。
對整機的主泵變量上、下階躍響應,主閥啟動電流、流量關系,制動器開啟、關閉響應,壓力管路長短響應等多個項目進行了測試,由于篇幅有限,本文僅對幾個重要項目的數據進行深入分析,其他項目不做贅述。
2.1.1 主泵變量上、下階躍響應數據及分析
首先將主泵全開,馬達開到最大排量,卷揚機進行空載,然后在提升過程中拔、插主泵變量電控插頭。測得主泵從小排量階躍到大排量階躍用時388ms,從大排量階躍到小排量階躍用時233ms。理論加速響應時間大于388ms,減速響應時間大于233ms。主泵小排量至大排量階躍壓力曲線如圖1 所示。主泵大排量至小排量階躍壓力曲線如圖2 所示。
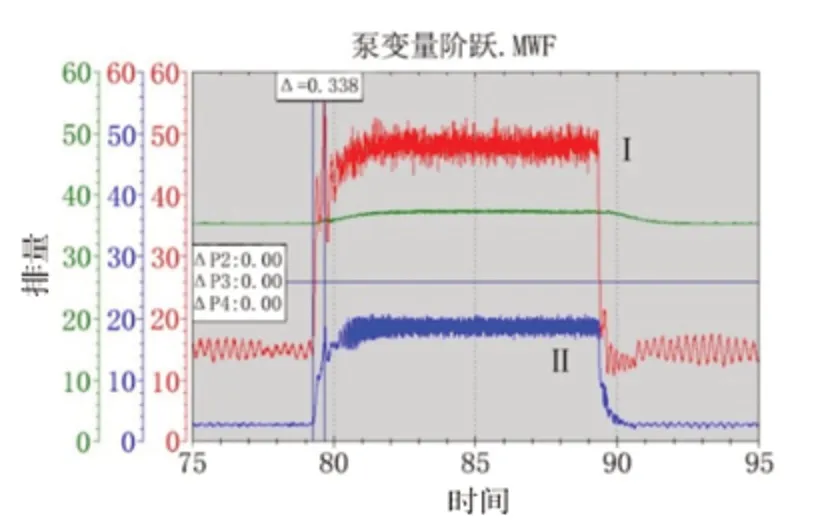
圖1 主泵小排量至大排量階躍壓力曲線
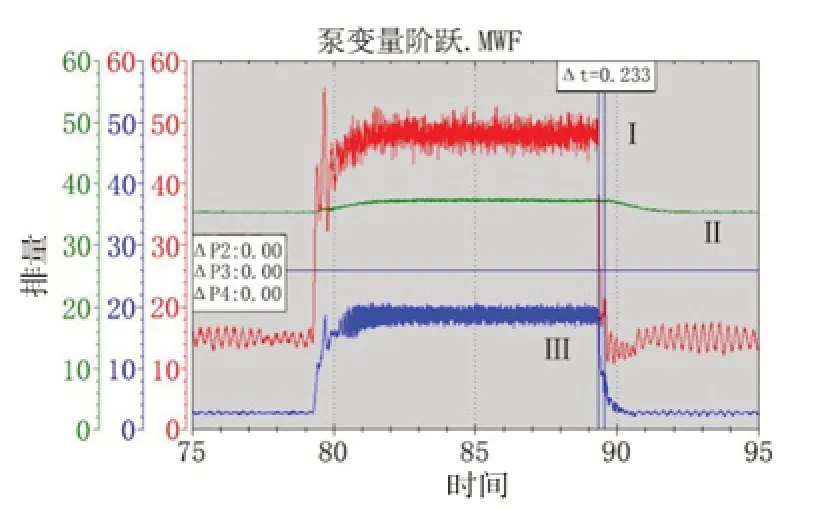
圖2 主泵大排量至小排量階躍壓力曲線
2.1.2 馬達變量上、下階躍響應
首先使發動機進入怠速狀態,主提升卷揚機進入空載提升狀態。測得馬達的排量從小到大的變量時間為6.1s,再進行馬達排量從大到小的計時,測得變量時間為2.5s。在卷揚機空載提升過程中,還可以對系統壓力進行分析。測試結果見圖3。(曲線Ⅰ為提升口壓力,曲線Ⅱ為制動口壓力,曲線Ⅲ降口壓力)。
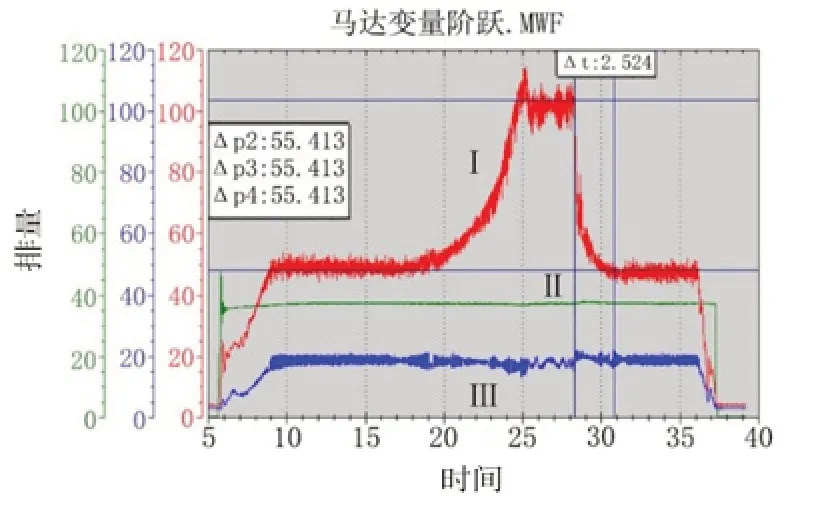
圖3 馬達變量階躍壓力曲線
2.1.3 壓力數據傳遞、控制響應時間分析
主提升馬達下降口傳感器壓力達到80bar(曲線Ⅰ),制動器開啟(曲線Ⅱ),測得控制響應時間為88ms(包含制動器開關閥的開啟響應時間)。圖4 為程序控制響應時間的波形圖。
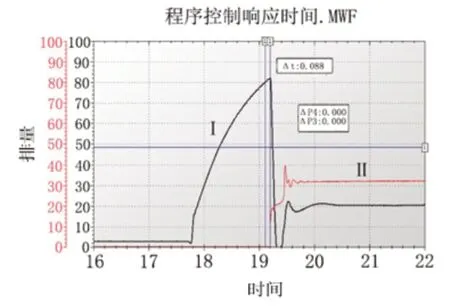
圖4 控制響應壓力曲線
2.2 回轉加速沖擊控制
起重機在回轉過程中常常會出現二次加速、推背感、頓挫感、停止沖擊、發動機轟鳴、速度不受控制等問題,這些問題會嚴重影響吊裝精度[2]。針對以上問題,本文提供了一種優化回轉閥芯與修改回轉控制策略,該策略對回轉閥芯節流槽通流面積進行了優化,對三維閥桿重新進行了設計。通過該方法減緩了回轉的啟停沖擊,提高了回轉微動性和回轉精度。
2.3 坡道啟停防溜控制
履帶起重機一般都是野外作業,作業環境惡劣,其中坡道的啟停很重要。當起重機處于坡道上且重載長臂架工況時,打開制動器的瞬間,上車被坡道阻力拉住向下運動,有翻車風險[3]。當小開度上坡回轉時,回轉壓力不足以克服坡道阻力,機器會向反方向運動。通過在回轉控制系統中增加回轉角度檢測裝置和更改自由滑輪開啟的判定條件可以實現坡道啟停的防溜控制。具體結構如圖5 所示。自由滑輪開啟的判定條件如下。
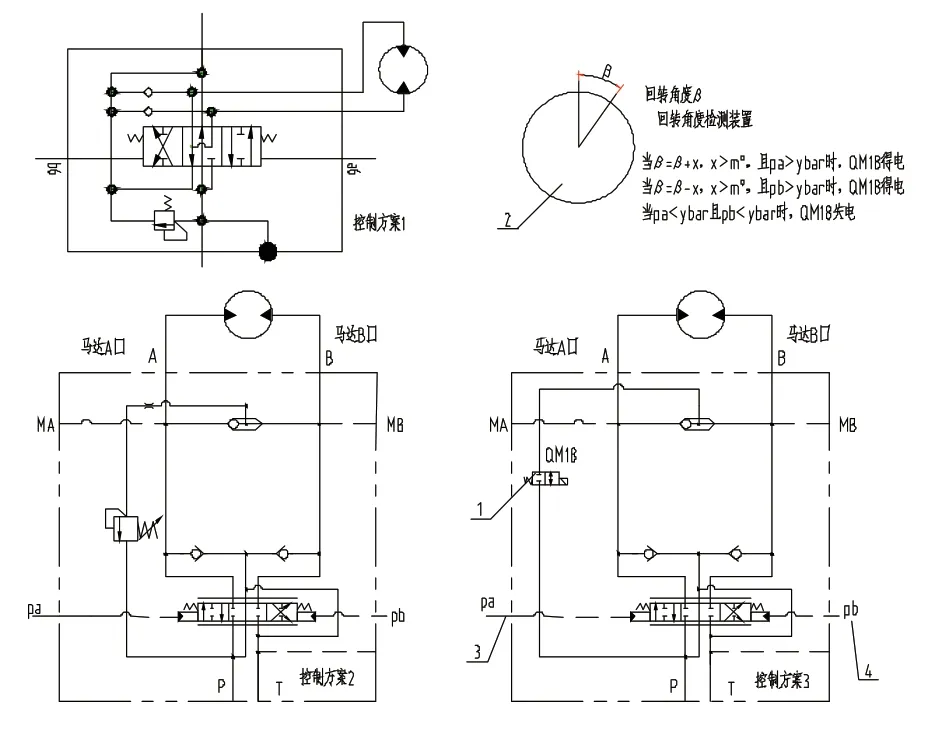
圖5 控制方案改進對比圖
1)β=β+x,x>m°,且Pa>ybar 時,控制閥得電。
2)β=β-x,x>m°,且Pa>ybar 時,控制閥得電。
3)Pa 其中β為回轉角度;x為坡道角度;Pa為A口的壓強;Pb為B 口的壓強。 機器作業時,使用副鉤小開度單倍率提升重載,逐漸加大主鉤手柄壓力,主副鉤均會發生抖動。通過引入輕重載防抖控制可以有效地降低抖動。輕重載防抖控制思路可以分為兩步:①增加電比例減壓閥、串接入手柄伺服壓力管路;②計算復合動作流量需求,限制比例閥電流。通過以上兩步可以實現對較大壓力手柄限制的目的。 本文在對履帶起重機的操控性提升過程中運用了許多技術,其中包括了精益電液匹配技術、卷揚運載參數異常識別技術。通過以上技術雖然不能提升起重機的工作性能,但是可以對起重機的工作狀態進行優化。進而提升起重機的操控性能。 起重機的電液系統的快速響應需要快速越過元器件的工作死區,同時精確微動有需要運用好元器件的工作起點。以上兩部分可以看作是相互制約的。因此,要實現精益的電液匹配,首先需要保證元器件特性的重復性,其次要進行的是元器件的初始工作點識別,并設置控制參數微調界面。實際操作步驟如下:先找到泵、閥控制基準,然后將操作指令快速傳達給電液系統最后實現泵、閥、制動器的銜接。 履帶起重機在起吊過程中,保證卷揚機的運轉正常是安全作業的前提。卷揚機運轉是否正常可以通過卷揚運轉參數體現出來。卷揚運轉參數異常會導致起吊不平穩,物料可能會出現擺動,嚴重的會導致翻車事故。為了避免事故發生,引進了一種卷揚運轉參數異常識別技術來對卷揚機工作狀態監控。該技術通過比較伺服壓力降低,補油壓力降低,馬達轉速與供給流量的匹配關系來評判卷揚機構運轉是否處于正常狀態。 本文首先對整機進行了硬件測試,其次針對回轉啟停沖擊、坡道啟停溜車和復合動作輕重載抖動問題,開發了回轉啟停沖擊控制、坡道啟停防溜控制和輕重載防抖控制方法,最后提出了精益電液匹配方法和卷揚運轉參數異常識別技術,全面提升了履帶起重機的操控性能,改善了履帶起重機“快、準、穩、暢”4 個維度的操作需求。2.4 輕重載防抖控制
3 運用技術分析
3.1 精益電液匹配方法
3.2 卷揚運轉參數異常識別技術
4 結語