基于FPGA的共聚焦顯微鏡振鏡掃描控制系統設計
2021-03-25 02:09:42賈仕達郭漢明
軟件導刊 2021年3期
關鍵詞:信號
賈仕達,黃 斐,薛 萌,郭漢明
(上海理工大學光電信息與計算機工程學院,上海 200093)
0 引言
激光共聚焦顯微鏡(Confocal Laser Scanning Micro?scope)是一種應用廣泛的高精密光學儀器,集光、機、電、計算機為一體,在生物醫學、軍事科技,甚至是日常生活中都有非常廣泛的應用[1-2]。共聚焦顯微鏡發展歷程最早可以追溯到20 世紀50 年代,但受當時技術條件限制,沒有合適的光源,計算機處理能力不夠,導致研究止步不前[3-5]。但是近幾十年來國外公司在該方向發展迅速,包括萊卡(Leica)、蔡司(Zeiss)、尼康(Nikon)等公司都有了較成熟的產品[6-7]。相比之下,國內對共聚焦顯微鏡的研究起步較晚,目前處在高速發展階段,有些較成熟的產品出于商業保密原因也鮮有發表相關文章供人參考[8-10]。
振鏡的掃描控制系統是控制振鏡運動的關鍵模塊,高校在實驗時使用的控制板卡大多為國外進口產品,價格昂貴[11-12],極大提高了實驗成本,其控制界面也較復雜,對剛接觸的使用者有一定難度。由此,本文提出了功能完善的硬件電路設計和以FPGA(Field Programmable Gate Array)為控制核心的軟件程序設計,相比現有的控制板卡和控制軟件,FPGA 可無限重新編程,時序控制也更加高速、精準,可以在結束一次掃描后修改程序即時調整掃描行數,使控制更加方便。通過實驗證明,這套系統可以穩定運行,系統信號的建立時間低至4μs,具有操作便捷、響應速度快、信號匹配精準、成本低的特點。
1 振鏡控制原理
掃描振鏡是一種高精度、高速矢量掃描器件,它由平面反射鏡、驅動電機、控制板卡組成[13]。工作時通過計算機向控制板卡發出振鏡掃描所需的工作電壓信號,控制板卡經過處理將信號發送給驅動電機,并驅動電機開始工作,使振鏡完成預定掃描。單一振鏡只能實現一個維度上的直線掃描,為實現二維平面掃描,就需要將兩個正交放置的振鏡組合在一起,讓它們相互配合運動[14-15]。二維振鏡掃描是指在X 軸和Y 軸方向上旋轉的兩個振鏡電機配合轉動以驅動反射鏡轉動,然后兩個反射鏡帶動激光束偏轉實現平面掃描[16-17]。實驗所用二維振鏡結構如圖1 所示。
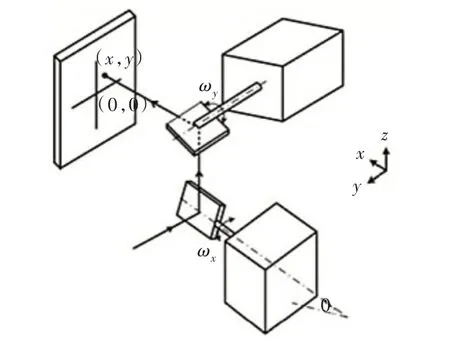
Fig.1 Two dimensional galvanometer structure圖1 二維振鏡結構
二維振鏡主要由兩片轉動軸互相垂直的反射鏡組成。在初始位置時,入射光線垂直于反射鏡的轉動軸,入射光線與反射鏡1(X 振鏡)的平面夾角為45°,相對偏轉角度為ωx,反射鏡1 反射給反射鏡2(Y 振鏡),此時反射光線與反射鏡2 的轉動軸垂直,與反射鏡面2 的夾角是45°,相對偏轉角度為ωy,此時光點位置認為是坐標系的原點。兩個振鏡轉動軸之間的距離為e,振鏡2 與接收面之間的距離為d,假設X 振鏡不動,僅僅改變Y 振鏡的偏轉角度,則對應的掃描點坐標公式如式(1)所示。

上式表達中,認為光點向上移動角度為正方向取+號,向下移動角度為負方向取-號。假設Y 振鏡不動,僅僅改變X 振鏡的偏轉角度,對應的掃描點坐標公式如式(2)所示。

當X 振鏡與Y 振鏡都有偏轉角度時,掃描點坐標公式如式(3)所示。

從式(3)看,掃描點的位置與X 振鏡和Y 振鏡的偏轉角度有關,而偏轉角度則取決于驅動電壓大小。X 振鏡為快速振鏡(共振式振鏡),振動頻率為7.931KHz,啟動條件為恒定電壓信號,電壓可調范圍為0~5V。Y 振鏡為慢速振鏡(檢流計式振鏡),每增加或減少一個單位的電壓表示掃描變換了一行,要將X 振鏡的位置反饋時鐘用作Y 振鏡的工作時鐘。Y 振鏡驅動電壓是階梯型三角波電壓信號,電壓信號為-1V~1V 范圍內峰值可調。
本系統采用往復式掃描,可以提高掃描速度。X 振鏡為橫向掃描,Y 振鏡為縱向掃描,X 振鏡每往復掃描一次為兩行,計一個周期,并給出反饋信號,實驗檢測頻率為7.931KHz 的方波信號。方波的每個上升沿和下降沿代表X 振鏡掃描換了一行,Y 振鏡需要在邊沿變換時改變驅動電壓,同時需要匹配X 振鏡反饋的方波信號,只有信號匹配正確才能驅動振鏡運動。二者關系如圖2 所示。

Fig.2 X,Y galvanometer signal relation圖2 X、Y 振鏡信號關系
2 振鏡控制系統硬件設計
振鏡控制系統硬件主要由電源模塊、X 振鏡信號模塊、Y 振鏡信號模塊、信號調理模塊這4 個主要模塊和其它幾個輔助模塊組成。系統結構如圖3 所示。

Fig.3 System structure圖3 系統結構
2.1 電源模塊
電源模塊是整個硬件電路的供電模塊,為電路中的其它模塊輸出所需電壓。因此需要一個性能穩定的芯片和設計合理的電路。TPS5430 是TI 公司推出的一款性能優越的DC/DC 開關電源轉換芯片,具有良好的電氣特性[18]。它有著峰值高達4A 的高電流輸出,5.5~36V 的寬電壓輸入范圍,最高95% 的轉換效率,最低1.22V 的寬電壓輸出范圍,500KHz 的轉換速率。此外,TPS5430 還有過流保護、熱關斷、內部軟啟動等輔助功能[19]。基于設計需要最終選擇TPS5430 作為電源模塊中的開關電源轉換芯片,電源模塊硬件電路原理如圖4 所示。
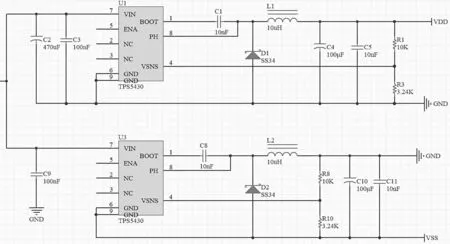
Fig.4 Schematic diagram of power supply module圖4 電源模塊原理
當GND 接6 號腳一端時,經1 號腳出來輸出5V 電壓,當GND 接1 號腳一端時,經6 號腳出來輸出-5V 電壓。該電源模塊紋波較小,可以穩定輸出±5V 電壓。
2.2 X 振鏡信號模塊
X 振鏡信號模塊為X 振鏡輸出驅動電壓。其驅動信號為固定電壓,要求在0~5V 內可調。本系統選用ADI 公司的16 位D/A 芯片AD5693R,它具有較高的相對精度,內置了2.5V 基準電壓,同時支持SPI 和I2C 協議,是可編程電壓源,價格便宜,滿足系統設計需求。其硬件電路原理如圖5 所示。
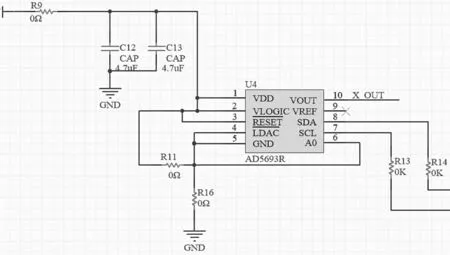
Fig.5 Principle of X-galvanometer signal module圖5 X 振鏡信號模塊原理
2.3 Y 振鏡信號模塊
Y 振鏡信號模塊為Y 振鏡輸出驅動信號。Y 振鏡響應完成時間是250μs,即給定一個電壓,Y 從原位置移動到目標位置時間是250μs,Y 振鏡要求驅動的響應延遲在2%以內,這樣才能有更好的掃描效果。最終確定選用響應時間為1μs 的16 位高精度D/A 芯片AD5541,基準電壓為2.5V,其中CS、DIN、SCLK 3 條信號線分別為邏輯輸入信號、串行數據輸入,時鐘輸入,決定數據傳輸。Y 振鏡信號模塊原理如圖6 所示。
2.4 信號調理模塊
由于AD5541 輸出信號是固定的0~2.5V 波形,而Y 振鏡需要-1~1V 范圍內峰值可調的波形,這就需要信號調理模塊將AD5541 輸出的信號轉變為Y 振鏡所需信號。信號調理模塊共使用3 個ADA4897 芯片,該芯片是一種軌到軌輸出放大器,具有低功耗、低失真、低噪聲的優點,其輸出電壓計算公式如式(4)所示。

式(1)中,VOUT為輸出信號,VIP為同相輸入信號,VIN為反相輸入信號,RF為輸出端與反相輸入端相連電阻,RG為反相輸入端電阻。

Fig.6 Principle of Y-galvanometer signal module圖6 Y 振鏡信號模塊原理
對于同相增益,VIN=0,其表達式如式(5)所示。

對于反相增益,VIP=0,其表達式如式(6)所示。

根據式(1)、式(2)、式(3)匹配合適的電阻,分別進行反向、放大、跟隨電路[20],最終得到所需的三角波信號。信號調理模塊原理如圖7 所示。

Fig.7 Principle of signal conditioning module圖7 信號調理模塊原理
根據以上設計,完成整體硬件原理圖設計與PCB 設計,并打板焊接。振鏡控制硬件電路實物照片如圖8 所示。
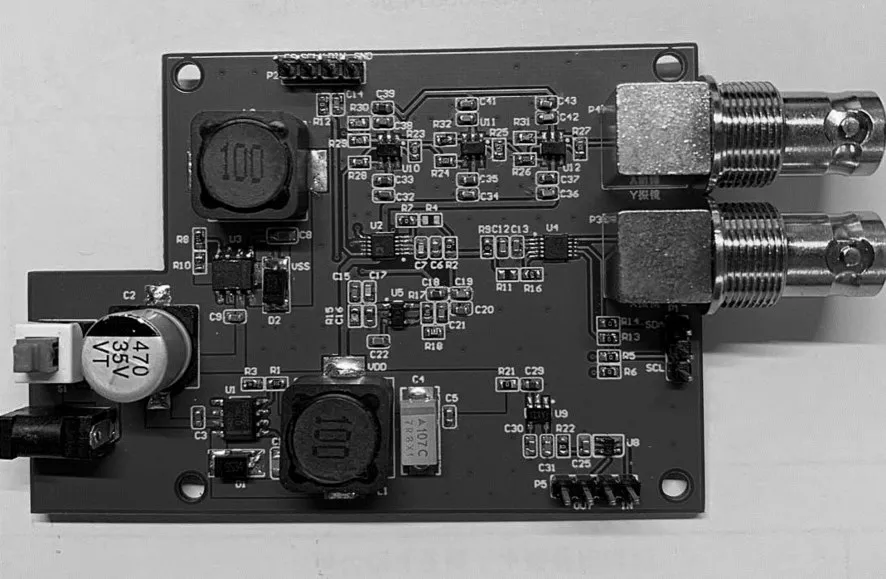
Fig.8 Hardware circuit photos圖8 硬件電路實物照片
3 振鏡控制系統軟件設計
本系統使用的是黑金ALTERA 系列FPGA 開發平臺5系列的產品AX515,是CYCLONE IV 系列FPGA,芯片型號為EP4CE15F23C8。X 振鏡和Y 振鏡的控制程序在Quartμs II 軟件上完成,使用verilog HDL 語言編寫控制程序,并進行模擬仿真,最后將程序燒錄到FPGA 的主芯片內對兩個振鏡分別進行控制。
3.1 X 振鏡控制軟件設計
X 振鏡控制信號為電壓范圍在0~5V 內的固定電壓信號。控制芯片使用AD5693R,使用IIC 協議進行通信。SCL 為串行時鐘線,SDA 為串行數據輸入/輸出,當SDA 線上發生高低轉換而SCL 處于高電平時,主機建立起始條件并啟動數據傳輸。數據按9 個時鐘脈沖的順序通過串行總線發送,包括8 個數據位和一個應答位,SDA 線上的數據轉換必須發生在SCL 的低電平期間,并且在SCL 高電平期間保持穩定。寫入所有數據位后,主器件在第10 個時鐘脈沖器件拉高SDA 線,建立停止條件。X 振鏡控制主程序流程如圖9 所示。
上位機通過串口發送指令,器件接收到指令后先后進行地址判斷和寫數據命令判斷,AD5693R 器件地址為1001_1000,寄存器地址為0011_0000,當器件地址和寫數據命令都正確后,開始發送16 位數據,先發送高八位數據再發送低八位數據,數據傳輸正確后將數字信號轉換成模擬信號并輸出給X 振鏡。傳輸嚴格遵守IIC 協議工作方式和時序要求。
3.2 Y 振鏡控制軟件設計
Y 振鏡所需的階梯狀三角波需要與X 振鏡反饋的方波進行匹配,根據圖2 可知,方波每個周期的上升沿和下降沿即為X 振鏡往復掃描一次(兩行),Y 振鏡的驅動電壓則需要在X 振鏡掃描的每一行去設定,掃描次數,也即設定掃描行數決定每個方波周期所給Y 振鏡驅動電壓的大小。
Y 振鏡驅動控制芯片采用16 位D/A 芯片AD5541,輸出電壓為0~2.5V,對應數據量為0~65 535,假設X 振鏡掃描2N 行,即為往復掃描N 次,則掃描一次的數據量變化為65 536/N。掃描開始后,每掃描一次增加65 536/N,到達滿數據量65 536 后每掃描一次減少65 536/N,直至0,之后不斷重復,并與方波周期相匹配,形成控制Y 振鏡運動的三角波。Y 振鏡控制程序流程如圖10 所示。

Fig.9 X-galvanometer control program flow圖9 X 振鏡控制程序流程
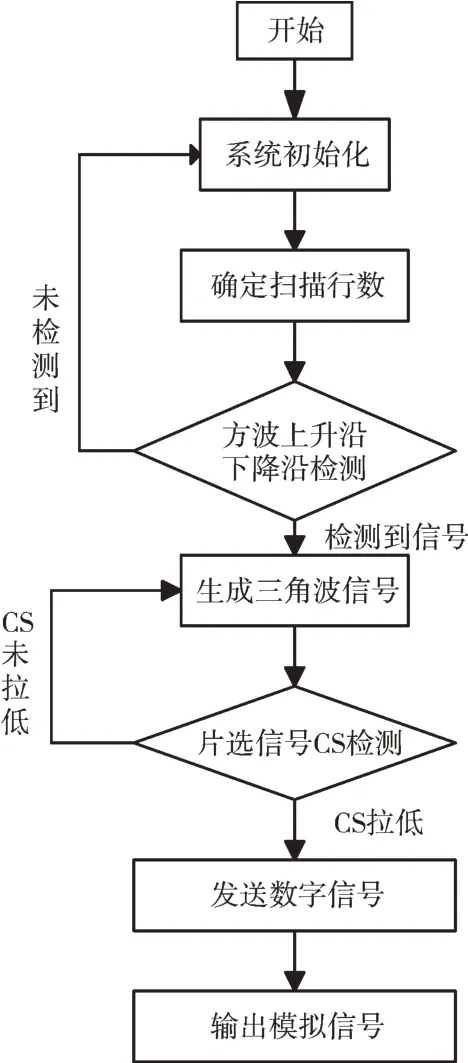
Fig.10 Y-galvanometer control program flow圖10 Y 振鏡控制程序流程
AD5541 芯片的時鐘信號最大不能超過25M,而FPGA芯片時鐘信號為50M,因此在給芯片寫數據之前要為芯片時鐘分頻,時鐘信號匹配后,程序首先檢測X 振鏡運動后反饋回來的方波信號的上升沿與下降沿,每一次臨近的上升沿與下降沿為一個周期。AD5541 芯片在數據傳輸過程中要嚴格遵守時序邏輯,時序圖如圖11 所示。
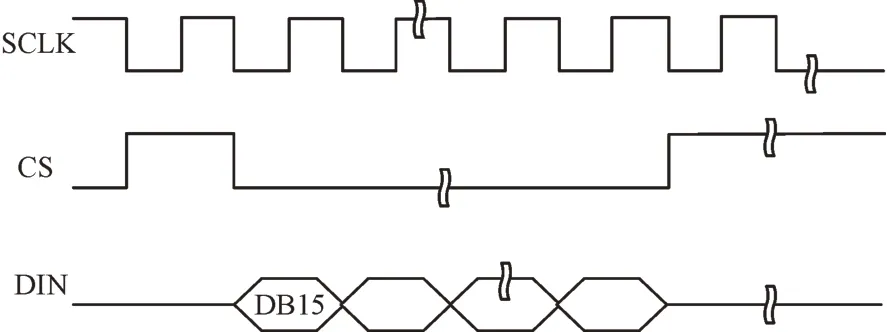
Fig.11 Sequence diagram圖11 時序圖
時鐘信號SCLK 在上下沿檢測時以25M 頻率運行,CS在數據傳輸之前處于高位,并持續一到兩個時鐘周期,檢測到上下沿信號后,在下一個時鐘信號的下降沿拉低芯片片選信號CS,準備向芯片傳輸數據,DIN 為數據寄存器,在CS 拉低15ns 后開始接受數據,每一位數據的傳輸持續30ns,且在時鐘信號SCLK 上升沿時完成,每次傳輸16 位數據,由高位向低位傳輸,最后一位數據傳輸結束后在下一個時鐘信號SCLK 的下降沿將CS 信號拉高,即說明本次數據傳輸完成。
4 實驗結果與分析
仿真正確后進行上機測試,將振鏡控制電路板上的X振鏡信號輸出端和Y 振鏡信號輸出端分別與轉接板上的X 振鏡信號輸入端和Y 振鏡信號輸入端相連接,并將FP?GA 與振鏡控制電路板連接。設定X 振鏡驅動電壓為1V,Y 振鏡為-1~1V,掃描64 行,每次數據量增加或減少2 048個。將示波器橫向設置為500μs 每格,縱向設置為2V 每格,測試掃描一幀的波形圖,測得信號如圖12 所示。
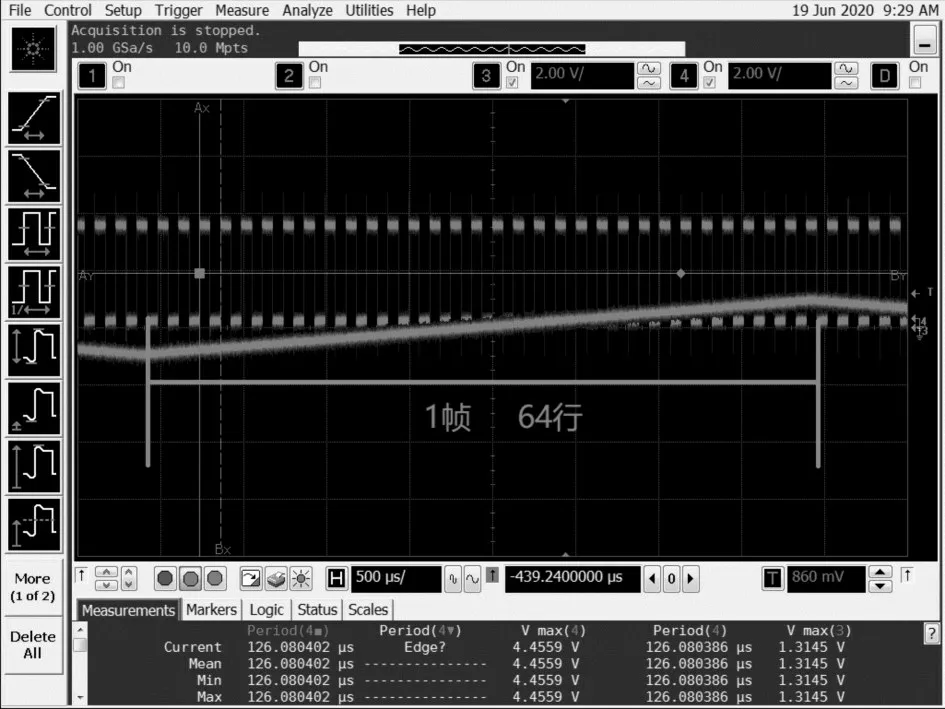
Fig.12 Signal圖12 信號
由振鏡運動原理可知Y 振鏡驅動電壓三角波每一次增加或減少電壓的過程為掃描一幀圖像的過程,根據圖13示波器測得波形可得Y 振鏡掃描一幀圖像經歷了方波的32 個周期,也即64 行,方波頻率126μs,與設定掃描條件一致。將示波器橫向數值放大為100μs 每格,Y 振鏡信號縱向數值設為500mv 每格,測出方波信號與三角波信號匹配情況如圖13 所示。

Fig.13 Signal matching圖13 信號匹配
從圖14 顯示的波形圖看,Y 振鏡的電壓變化隨著X振鏡反饋方波的周期而改變,X 振鏡每掃描一行,Y 振鏡驅動電壓就變換一次,未發生匹配錯位情況,振鏡可以正常工作。將示波器橫向數值放大為1μs 每格,測試Y 振鏡信號響應時間,觀察到本設計Y 振鏡驅動信號響應時間是4μs,低于所要求的2%,說明本驅動系統可以使振鏡運動更加穩定、精確。測試結果如圖14 所示。

Fig.14 Response time圖14 響應時間
5 結語
本文設計了一套基于FPGA 的共聚焦顯微鏡的振鏡掃描控制系統,通過實驗證明,系統中X 振鏡反饋信號與Y振鏡驅動信號匹配正確未錯位,可以驅動振鏡穩定、準確工作。振鏡的驅動信號具有較快的響應時間,可以最大限度地降低因為信號響應時間較長造成的圖像質量下降問題。同時,本方案可以應用到同類型共聚焦顯微鏡上,降低實驗成本。但本方案也存在一些不足,由于串口傳輸速度較慢,當進行多幀采集時傳輸時間會大幅增加,影響采集效率。后續研究中可使用USB2.0 代替串口通信,最大理論傳輸速度可達60MB/s,提高采集效率。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06