變電站室內二次屏柜無人機巡檢系統研究
2021-03-24 06:42:12孫小磊朱子軒湯宗堯
湖北電力 2021年6期
孫小磊,林 童,陳 昊,朱子軒,洪 宇,湯宗堯
(1.國網江蘇省電力有限公司超高壓分公司,江蘇 南京 211102;2.國網江西省電力有限公司上饒供電分公司,江西 上饒 334100;3.三峽大學,湖北 宜昌 443000;4.國網江蘇省電力有限公司連云港供電分公司,江蘇 連云港 222000)
0 引言
隨著國民經濟的發展,電網結構日益強大,變電站數量也隨之增多。新時代背景下,電網公司對變電站的精益化運維管理提出了更高的要求[1-2],這些與電網公司結構性人員緊缺的矛盾日益凸顯[3],因此亟需尋找替代人工巡視的方法。隨著無人機技術發展,無人機已具備部分代替人工巡視的能力,具有長續航、多配件掛載和智能化水平的無人機將在電網有更廣泛的應用[4-6]。而隨著智能技術的普及,無人機結合人工智能技術,將進一步提升變電站設備巡視和異常檢測水平,將電力巡檢向更智能的方向推進。文獻[7]-文獻[11]討論了變電站內無人機巡檢技術,但大多討論無人機巡檢在變電站一次現場的應用,由于變電站室內巡檢(如保護室巡檢),需觀察細節多,路線規劃復雜,目前針對變電站室內無人機巡檢的研究仍比較少[12]。在此背景下,本文針對變電站室內二次屏柜無人機巡檢的關鍵問題開展了相關研究,提出了巡檢任務的動態規劃算法和圖像智能識別方法,在江蘇地區某500 kV變電站室內的現場應用驗證了所提方法的有效性。
1 二次屏柜立體巡檢建模
為實現室內無人機巡檢任務的快速制定與執行,需要建立變電站室內二次屏柜的三維立體巡檢的數字化模型,該模型包括變電站室內設備的裝置類型、位置坐標和檢查點位等信息。對于變電站建模,通常有幾何實體建模、參數化建模和激光掃描建模等方法[13]。由于變電站室內二次屏柜形狀相對規則,保護、測控裝置等多采用模塊化設計,因此宜采用參數化建模方式。由于XML 可擴展標記語言(Extensible Markup Language)能夠在描述數據內容的同時,展示數據之間的關系,具有良好的可擴展性、傳輸簡便性[14],因此根據室內無人機巡檢任務所需信息,采用XML語言描述變電站室內二次屏柜立體巡檢模型,包括場景、組、屏柜、裝置、無人機、無人機進出點、無人機檢查點和其他物體等模型,其類別與描述如表1所示。
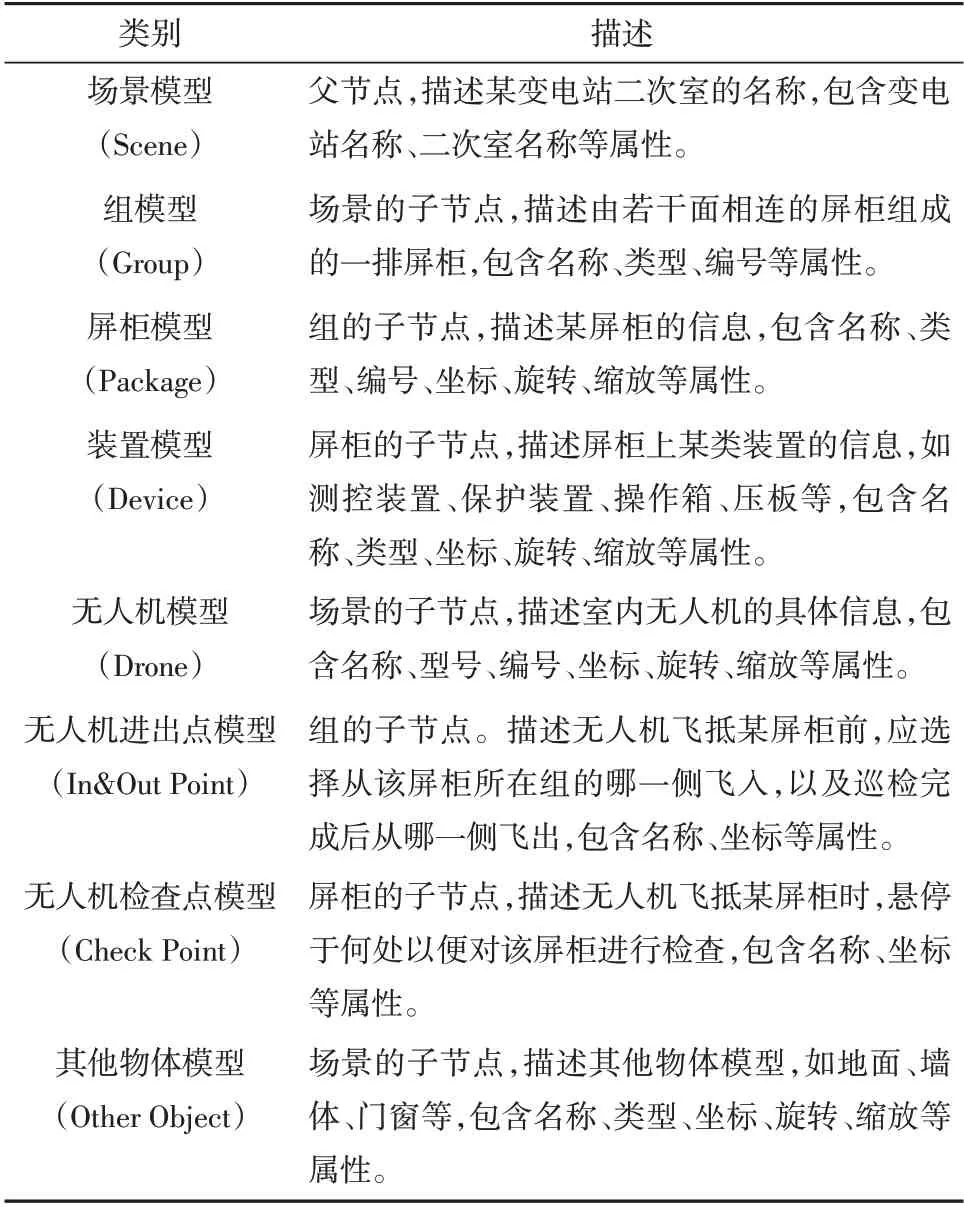
表1 變電站室內二次屏柜立體巡檢模型表Table 1 Three dimensional inspection model of indoor secondary panel and cabinet in Substation
通過XMLSpy軟件展示二次屏柜巡檢模型XML文件結構如圖1所示。
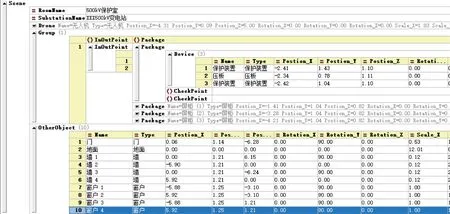
圖1 某變電站500 kV保護室立體巡檢XML模型文件Fig.1 XML model file of three-dimensional patrol inspection in 500 kV protection room of a substation
對于參數化建模,需要事先建立各類設備的標準模型庫。常用的模型設計軟件有3D Max、Maya、C4D和SolidWorks等。將建立的標準模型庫導入三維引擎軟件并解析XML模型文件,即可自動生成變電站室內二次屏柜三維模型場景,圖2 即為二次屏柜立體巡檢的部分標準模型。本文選用Unity作為三維引擎,通過C#腳本文件,實現XML 模型文件的解析、場景的生成和無人機路徑的自動規劃[15,16],如圖3所示。

圖2 標準模型庫Fig.2 Standard model library
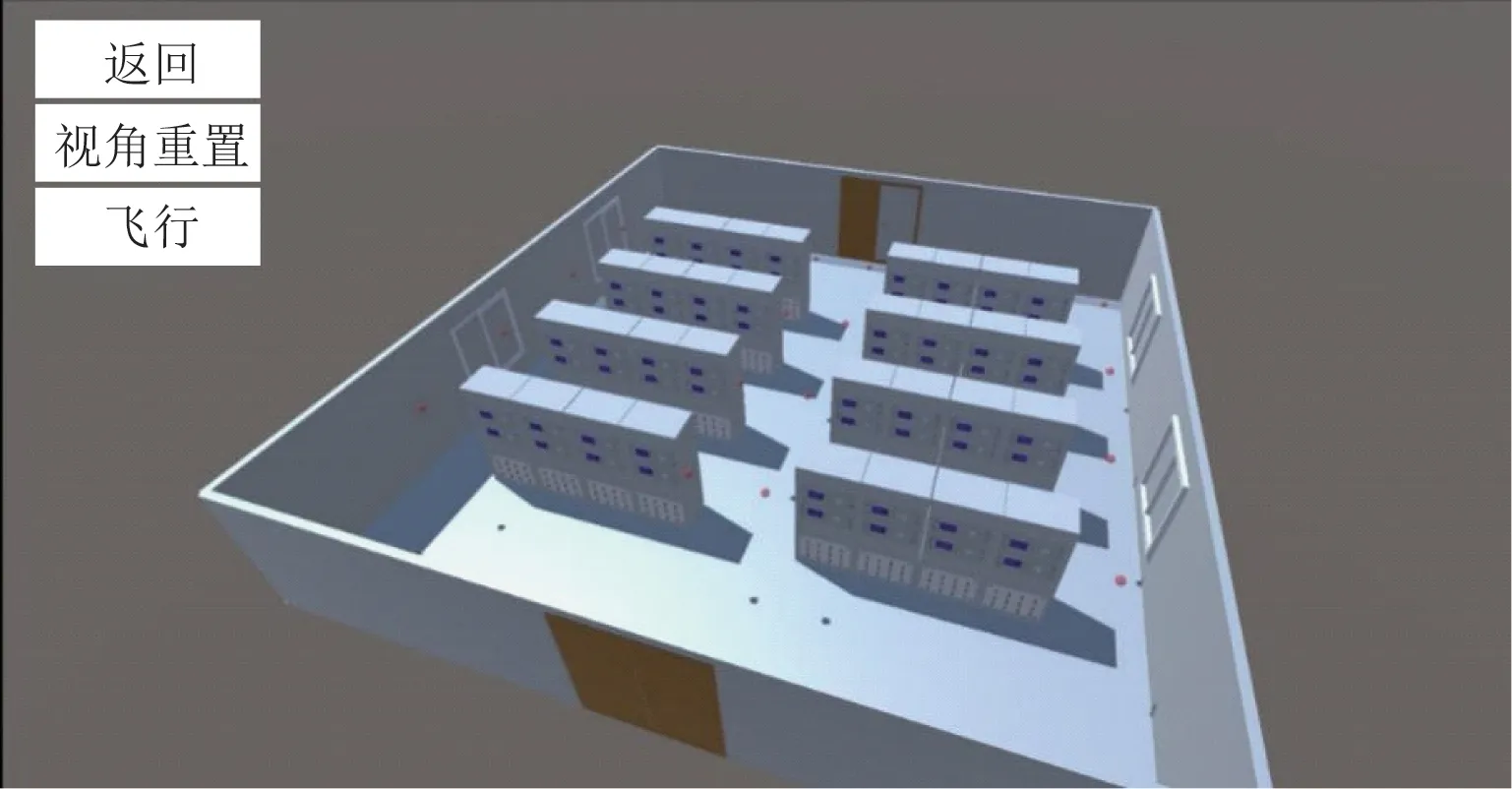
圖3 自動生成的三維模型場景Fig.3 Automatically generated 3D model scene
2 無人機飛行控制
由于變電站室內全球導航衛星系統(GNSS,Global Navigation Satellite System)信號通常較弱,定位精度不高;而超寬帶[17](UWB,Ultra Wide Band)定位系統成本較高,且傳輸信號易受二次屏柜阻擋產生非視距誤差[18](NLOS,Non Line Of Sight),因此本文構建一種基于地面QR(Quick Response)二維碼坐標進行定位的低成本室內無人機定位方法(地面QR 碼定位法),即無人機通過掃描地面坐標QR碼來標定自身位置并進行姿態調整。QR 碼標定法精度明顯高于GNSS 定位,成本大大低于UWB定位,地面QR碼定位法示意圖如圖4所示。
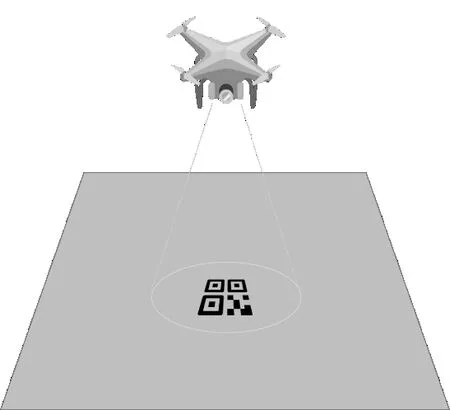
圖4 無人機掃描QR碼定位示意圖Fig.4 Schematic diagram of QR code location scanned by UAV
在室內二次屏柜三維模型的基礎上,為實現任意屏柜組合的巡視路徑規劃,需要設計相應無人機飛行路徑規劃算法。
首先,約定無人機飛行應遵循以下規則:
1)無人機飛抵某屏柜時,應從該屏所在某排屏柜規定的點位進出;
2)無人機與屏柜保持相同平面飛行,不可越過屏柜從上方飛行;
3)無人機飛行軌跡應遵循正交化原則,即每段軌跡只能沿某一坐標軸飛行。
根據以上原則,設計無人機飛行軌跡自動生成算法,偽代碼如下:
輸入:需要巡視的屏柜;
輸出:無人機飛行軌跡列表;
從數據庫獲取需要巡視的屏柜檢查點、所在組進出點、無人機起點坐標等數據;
獲取需要巡視的屏柜所在組列表;
將無人機起點加入軌跡列表;
在需要巡視的屏柜所在組中,選擇距離無人機最近的進出點并加入軌跡列表;
將該組中所需巡檢屏柜的檢查點加入軌跡列表;
If 組數=1
在該組中,選擇距離無人機起點最近的進出點并加入軌跡列表;
Else
從組列表中刪除該組;
While(組數>0)
在剩下的組中,選擇距離上一組無人機飛出點最近的進出點并加入軌跡列表;
將該組中所需巡檢屏柜的檢查點加入軌跡列表;
If 組數=1
在該組中,選擇距離無人機起點最近的進出點并加入軌跡列表;
從組列表中刪除該組;
將無人機起點加入軌跡列表;
正交化軌跡列表。
圖5中綠色線即為自動生成的某二次室部分屏柜無人機巡檢飛行軌跡。
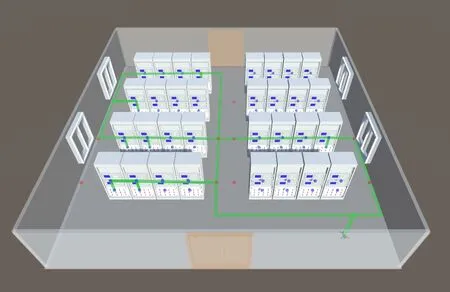
圖5 無人機巡檢軌跡示意圖Fig.5 Schematic diagram of UAV patrol track
3 二次屏柜關鍵設備識別
無人機到達指定檢查位置后,通過攝像頭采集圖像,發送至控制后臺分析。后臺程序根據與訓練模型,對二次屏柜的壓板投退狀態、指示燈狀態等進行識別,將識別結果與數據庫中正常設備運行狀態對比,判斷當前設備狀態是否正常。
針對二次屏柜關鍵設備狀態識別,用改進的SSD_Inception 模型進行圖像識別[19]。SSD(Single Shot Multi-Box Detector)網絡是一種端到端的單次多框實時檢測的深度神經網絡模型[20,21],而Inception 結構是GoogleNet 中的一個具備不同尺度卷積核的模塊[22-24],將Inception 結構嵌入SSD 所得的SSD_Inception 模型,具備良好的時效性和準確性,可以兼顧不同尺度的目標檢測,其結構如圖6所示。
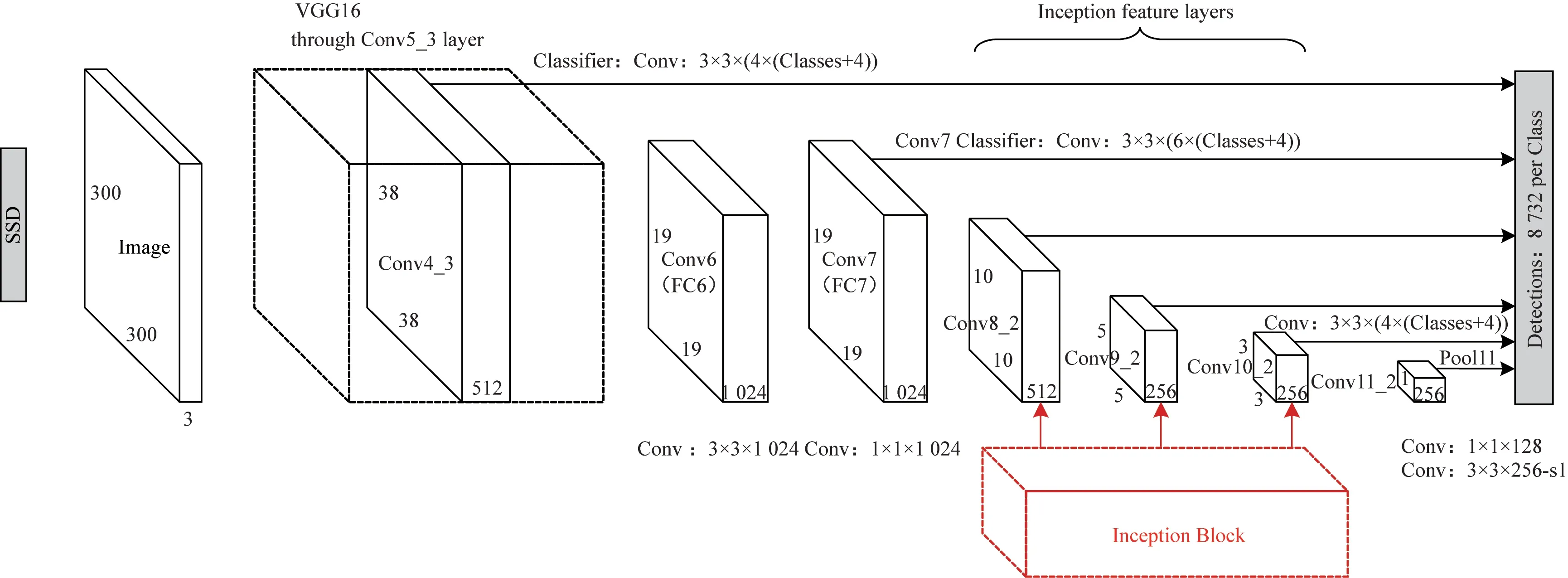
圖6 SSD_Inception 模型網絡結構圖Fig.6 SSD_Inception model framework
采用上述模型,通過訓練,可以實現對二次屏柜的壓板投退狀態、指示燈狀態的有效識別,并經OpenVINO 工具套件對模型進行優化后,具備較快的響應速度[24-30]。
4 現場應用
選用大疆御Mavic Air 作為無人機平臺。大疆御系列作為成熟的無人機平臺,具備穩定的飛控系統、良好的圖傳能力和較長的續航時間,其攝像頭帶有云臺穩定系統,保證了無人機在室內飛行過程中的照片拍攝的清晰度。大疆御系列無人機具備開源SDK,支持Android、iOS、Linux 和Windows 等多平臺的二次開發,可以滿足現場實驗需求。圖7為現場測試圖片。

圖7 巡視中的Mavic Air無人機Fig.7 Mavic air in patrolling
選取不同視角下保護屏柜狀態指示燈和壓板圖片共143 張,其中包含壓板樣本2 033 個,狀態指示燈樣本856個,通過labelImg工具對圖片上的壓板開合狀態和指示燈亮滅狀態進行人工標注,按8:2 的比例將樣本分為訓練集和評估集輸入SSD_Inception 模型,設置訓練次數為10 000次,批大小(Batch Size)為2,其損失率曲線如圖8所示。

圖8 損失率曲線Fig.8 Loss rate curve
訓練完成后獲取該模型的靜態圖文件,再經OpenVINO 工具套件優化,可以提升圖像識別效率。對40 張壓板和狀態燈圖片進行測試(如圖9),結果如表2所示。

表2 優化后模型圖像識別測試結果Table 2 Optimized model image recognition test results
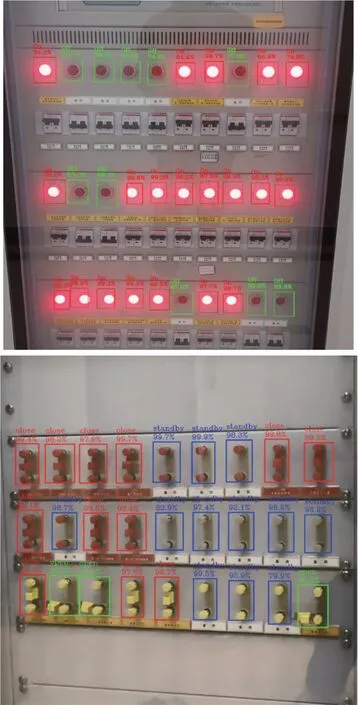
圖9 部分狀態燈和壓板檢測結果Fig.9 Test results of some status lights and pressing plates
現場實驗結果表明,本文所提方法可以優先實現圖像智能識別,具備人工巡視替代的技術條件。
5 結語
在變電站無人化值守的趨勢下,為實現變電站二次室的無人化巡視,本文設計了基于XML可擴展編輯語言的變電站二次室建模方法,通過模塊化、參數化的設計方法實現模型的快速建立;提出了一種適用于無人機巡檢的地面QR碼定位法設計了巡檢任務的動態規劃算法;通過對SSD_Inception 目標檢測模型的研究,實現對采集照片的智能識別。通過對以上關鍵性問題的研究,提供了無人機在二次保護室的無人化巡檢的整體解決方案。
在此基礎上,為進一步提升無人機巡檢效果,未來將在以下幾個方面繼續深入:
1)基于IEC 61850 的無人機飛行控制協議,將無人機作為IED納入智能變電站管理體系;
2)增強無人機巡檢的指針式、數字式儀表讀數識別能力;
3)優化無人機定位控制算法,實現更高精度的無人機室內定位。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
電子制作(2018年8期)2018-06-26 06:43:34
電子制作(2017年8期)2017-06-05 09:36:15
光學精密工程(2016年6期)2016-11-07 09:07:19
現代工業經濟和信息化(2016年5期)2016-05-17 05:35:57
核科學與工程(2015年4期)2015-09-26 11:59:03
河南電力(2015年5期)2015-06-08 06:01:45
水電站機電技術(2014年1期)2014-09-26 11:59:53
