基于無人機(jī)與計(jì)算機(jī)視覺的中國古建筑木結(jié)構(gòu)裂縫監(jiān)測系統(tǒng)設(shè)計(jì)
2021-03-22 07:17:18李天昊
工程力學(xué) 2021年3期
楊 娜,張 翀,李天昊
(1. 北京交通大學(xué)土木建筑工程學(xué)院,北京 100044;2. 南加利福尼亞大學(xué)工學(xué)院,美國加利福尼亞州洛杉磯市 90007)
中國古建筑木結(jié)構(gòu)具有極高的歷史、文化價(jià)值,但在其漫長的服役周期中,環(huán)境、人為因素導(dǎo)致中國古建筑木結(jié)構(gòu)出現(xiàn)各種形式的損傷。經(jīng)調(diào)研,裂縫是中國古建筑木結(jié)構(gòu)最為常見的損傷形式。中國古建筑木結(jié)構(gòu)裂縫數(shù)量多、成因雜、危害大,發(fā)展規(guī)律難預(yù)測。中國古建筑木結(jié)構(gòu)構(gòu)件采用榫卯連接,裂縫引起的斷裂會(huì)導(dǎo)致整體結(jié)構(gòu)出現(xiàn)連續(xù)性倒塌[1],故目前亟需對(duì)中國古建筑木結(jié)構(gòu)裂縫進(jìn)行監(jiān)測。
從其他領(lǐng)域危險(xiǎn)裂縫監(jiān)測案例來看,一般裂縫監(jiān)測包括危險(xiǎn)裂縫識(shí)別和危險(xiǎn)裂縫生長監(jiān)測兩個(gè)步驟。在識(shí)別出結(jié)構(gòu)中危險(xiǎn)裂縫后,應(yīng)實(shí)時(shí)將該裂縫的生長情況反饋給監(jiān)測人員,方便監(jiān)測人員根據(jù)該裂縫的發(fā)展規(guī)律判斷結(jié)構(gòu)是否需要修繕。但對(duì)于大多數(shù)中國古建筑木結(jié)構(gòu),目前僅用人工檢測的方式識(shí)別和記錄危險(xiǎn)裂縫。少部分中國古建筑木結(jié)構(gòu)引入了超聲波[2]、應(yīng)力波[3 ? 4]、皮羅釘[5]等無損檢測儀器。但是上述裂縫檢測方式存在如下弊端:上述方法人力、物力和財(cái)力消耗巨大;檢測過程存在無法到達(dá)的盲區(qū);檢測結(jié)果誤差大,且與檢測人員自身專業(yè)水平息息相關(guān);檢測周期較長,導(dǎo)致其難以反饋結(jié)構(gòu)突發(fā)事件,檢測缺乏時(shí)效性。

圖1 文章框架Fig.1 The article framework
面對(duì)中國古建筑木結(jié)構(gòu)裂縫,目前需要設(shè)計(jì)一種實(shí)時(shí)、在線、動(dòng)態(tài)、無接觸式、無需依賴人工的裂縫監(jiān)測方法。目前中國古建筑木結(jié)構(gòu)領(lǐng)域沒有類似的方法,但近年來橋梁結(jié)構(gòu)裂縫監(jiān)測領(lǐng)域提出了基于無人機(jī)和計(jì)算機(jī)視覺的裂縫監(jiān)測系統(tǒng)[6]。通過分析可知,將上述系統(tǒng)用于中國古建筑木結(jié)構(gòu)裂縫監(jiān)測存在如下問題:1)對(duì)于無人機(jī)系統(tǒng),其他領(lǐng)域無人機(jī)系統(tǒng)均依賴GPS 信號(hào),并自主規(guī)劃路徑[7],對(duì)于監(jiān)測路徑可靠性要求極高,且所處環(huán)境GPS 信號(hào)較弱的中國古建筑木結(jié)構(gòu)來說,已有無人機(jī)很難對(duì)其裂縫進(jìn)行監(jiān)測;2)對(duì)于相機(jī)系統(tǒng),中國古建筑木結(jié)構(gòu)裂縫監(jiān)測過程中需使用貼面正攝,拍攝距離和相機(jī)廣角使得上述過程需引入圖像拼接技術(shù),對(duì)鋼結(jié)構(gòu)和混凝土結(jié)構(gòu)裂縫進(jìn)行監(jiān)測時(shí),拍攝距離足夠且裂縫較為細(xì)小,因此并未使用圖像拼接技術(shù)[8],用于無人機(jī)遙感航拍的圖像拼接技術(shù)往往可選特征多,拼接精度要求不高[9],同樣無法滿足本文要求;3)對(duì)于圖像處理系統(tǒng),目前裂縫監(jiān)測圖像處理方法多源于鋼結(jié)構(gòu)和混凝土結(jié)構(gòu),這些結(jié)構(gòu)的裂縫像素點(diǎn)占比少,與背景灰度值存在重疊,但與背景和噪聲形態(tài)不同,因此,研究人員通常使用基于形態(tài)的受限玻爾茲曼機(jī)(RBM)[10]和深度卷積神經(jīng)網(wǎng)絡(luò)(DCNN)[11]提取裂縫信息。但中國古建筑木結(jié)構(gòu)裂縫與鋼結(jié)構(gòu)和混凝土結(jié)構(gòu)裂縫差異較大,中國古建筑木結(jié)構(gòu)裂縫像素點(diǎn)占比多,且與背景灰度值差別明顯,但存在與裂縫形態(tài)相似的木紋噪聲,因此目前常用的裂縫提取方法無法直接應(yīng)用。
綜上所述:首先,介紹了中國古建筑木結(jié)構(gòu)裂縫成因、發(fā)展規(guī)律和危險(xiǎn)裂縫判別條件;其次,分別提出了適合于中國古建筑木結(jié)構(gòu)裂縫監(jiān)測的無人機(jī)系統(tǒng)、相機(jī)系統(tǒng)和圖像處理系統(tǒng);最后,利用中國古建筑木結(jié)構(gòu)亭子模型驗(yàn)證本文設(shè)計(jì)的裂縫監(jiān)測系統(tǒng)的可行性。本文框架如圖1所示。
1 中國古建筑木結(jié)構(gòu)裂縫特征
1.1 中國古建筑木結(jié)構(gòu)裂縫成因與危害
中國古建筑木結(jié)構(gòu)建造年代久遠(yuǎn),很多木構(gòu)件上皆存在裂縫(如圖2),而中國古建筑木結(jié)構(gòu)裂縫成因與其他結(jié)構(gòu)(鋼結(jié)構(gòu)、混凝土結(jié)構(gòu))裂縫成因差異較大。中國古建筑木結(jié)構(gòu)原料的生長過程和結(jié)構(gòu)的建造過程均會(huì)產(chǎn)生裂縫,尤其是其服役過程,風(fēng)吹日曬、腐朽蟲蛀等環(huán)境影響,以及游客、改建等人為影響均會(huì)令古建筑木結(jié)構(gòu)產(chǎn)生裂縫[12]。

圖2 中國古建筑木結(jié)構(gòu)裂縫Fig.2 Cracks in Chinese ancient wooden buildings
裂縫在后續(xù)荷載和環(huán)境作用下會(huì)進(jìn)一步發(fā)展,且因木材的強(qiáng)正交各向異性和復(fù)雜的微觀構(gòu)造導(dǎo)致裂縫發(fā)展規(guī)律極其復(fù)雜[13]。在現(xiàn)場很難確定古建筑木結(jié)構(gòu)裂縫何時(shí)開始發(fā)展以及發(fā)展的速度。但因?yàn)橹袊沤ㄖ窘Y(jié)構(gòu)中的木材水分含量低,裂縫一旦擴(kuò)展極易出現(xiàn)脆斷現(xiàn)象(如圖3),局部的脆斷也將導(dǎo)致整體結(jié)構(gòu)的連續(xù)性倒塌。因此相比于鋼結(jié)構(gòu)和混凝土結(jié)構(gòu),古建筑木結(jié)構(gòu)更需要進(jìn)行實(shí)時(shí)裂縫監(jiān)測。
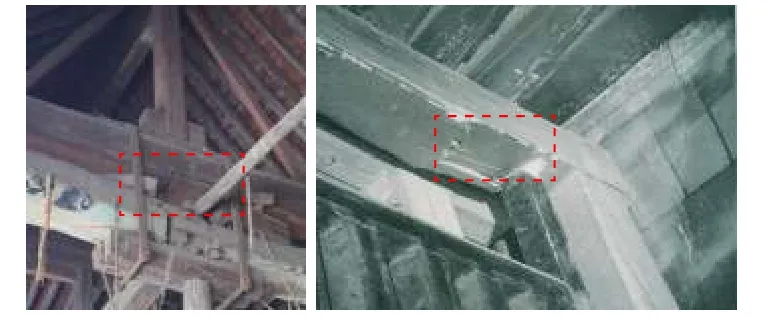
圖3 中國古建筑木結(jié)構(gòu)構(gòu)件斷裂Fig.3 Fracture of members in Chinese ancient wooden building
1.2 中國古建筑木結(jié)構(gòu)危險(xiǎn)裂縫評(píng)價(jià)指標(biāo)
中國古建筑木結(jié)構(gòu)中裂縫繁多,但并不是每一條裂縫的生長都會(huì)引起脆斷。因此本文設(shè)計(jì)的裂縫監(jiān)測系統(tǒng)首先應(yīng)識(shí)別出危險(xiǎn)裂縫,即該裂縫繼續(xù)發(fā)展極可能造成構(gòu)件斷裂,識(shí)別后對(duì)危險(xiǎn)裂縫的生長進(jìn)行實(shí)時(shí)監(jiān)測。據(jù)《古建筑木結(jié)構(gòu)維護(hù)與加固技術(shù)規(guī)范》[14]《古建筑修建工程施工及驗(yàn)收規(guī)范》[15],危險(xiǎn)裂縫判別指標(biāo)見表1、表2。
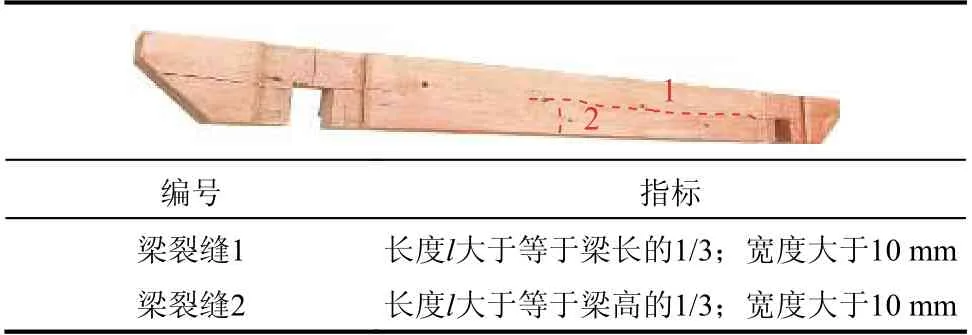
表1 木梁危險(xiǎn)裂縫評(píng)價(jià)指標(biāo)Table 1 Evaluation index of dangerous cracks in wooden beams

表2 木柱危險(xiǎn)裂縫評(píng)價(jià)指標(biāo)Table 2 Evaluation index of dangerous cracksin wooden columns
工程人員可依據(jù)被監(jiān)測的中國古建筑木結(jié)構(gòu)情況,對(duì)將要達(dá)到上述指標(biāo)的裂縫進(jìn)行識(shí)別,同樣作為實(shí)時(shí)監(jiān)測對(duì)象,使結(jié)構(gòu)存在一定的安全冗余度。
2 無人機(jī)系統(tǒng)設(shè)計(jì)
2.1 無人機(jī)系統(tǒng)設(shè)計(jì)依據(jù)
無人駕駛飛機(jī)簡稱“無人機(jī)”(unmanned aerial vehicle,UAV),因其使用費(fèi)用低、飛行安全性高、自然環(huán)境適應(yīng)性好,而被應(yīng)用于農(nóng)業(yè)灌溉、森林防 火、電力和輸油管巡檢、災(zāi)后評(píng)估和建筑物外觀檢查等領(lǐng)域,但目前國內(nèi)外并沒有研究人員在中國古建筑木結(jié)構(gòu)裂縫監(jiān)測過程中使用無人機(jī)。不同領(lǐng)域需求不同,導(dǎo)致無人機(jī)系統(tǒng)設(shè)計(jì)存在差異,因此本研究設(shè)計(jì)了適用于中國古建筑木結(jié)構(gòu)裂縫監(jiān)測的無人機(jī)系統(tǒng)。表3展示了本文無人機(jī)系統(tǒng)的設(shè)計(jì)依據(jù)及其與目前已有無人機(jī)的差別,圖4 中展示了基于上述要求設(shè)計(jì)的適合于中國古建筑木結(jié)構(gòu)裂縫監(jiān)測的無人機(jī)系統(tǒng)。
2.2 無人機(jī)系統(tǒng)特點(diǎn)
本文設(shè)計(jì)的適用于中國古建筑木結(jié)構(gòu)裂縫監(jiān)測的無人機(jī)系統(tǒng)與目前已有的其他領(lǐng)域的無人機(jī)系統(tǒng)均不相同,其具有如下特點(diǎn):
1)該無人機(jī)屬于輕小型無人機(jī),機(jī)身最大對(duì)角軸距400 mm,總重量為907 g,能夠滿足中國古建筑木結(jié)構(gòu)狹小空間內(nèi)裂縫監(jiān)測需求;
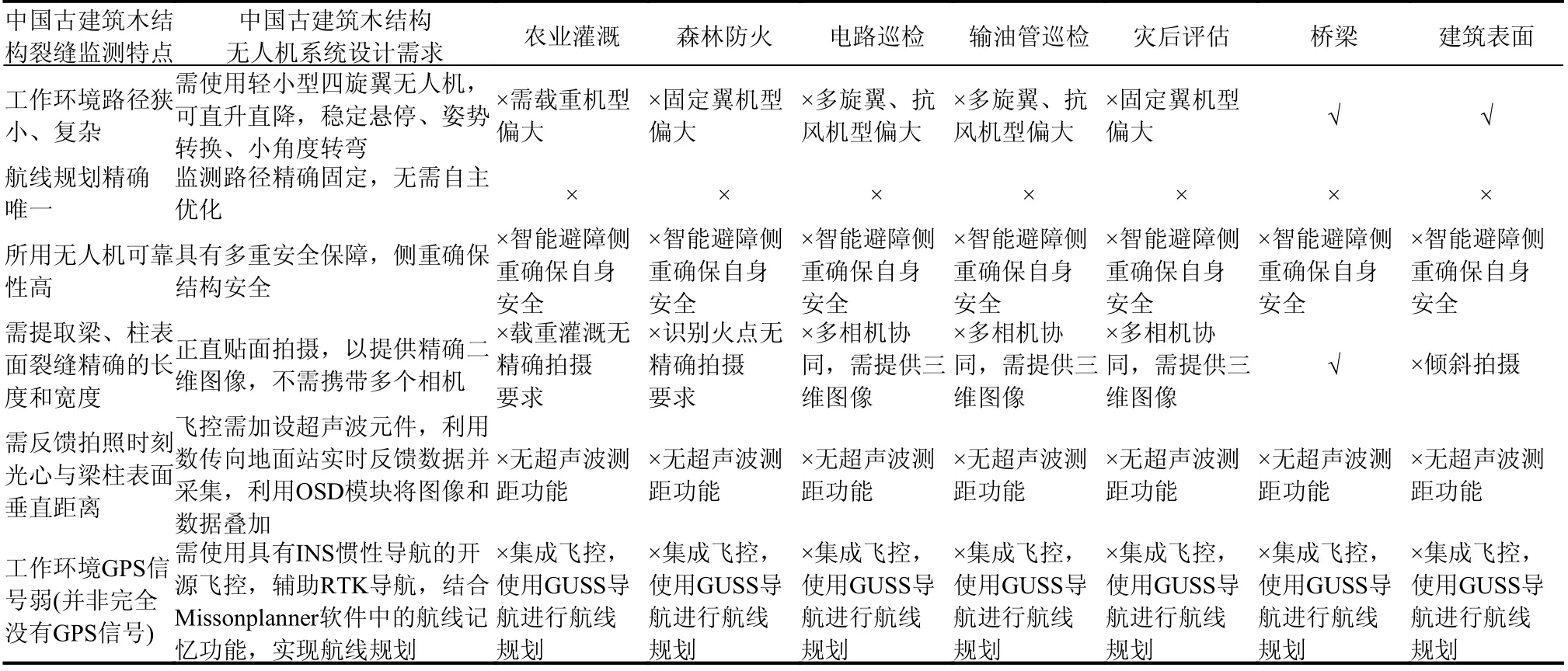
表3 中國古建筑木結(jié)構(gòu)裂縫監(jiān)測無人機(jī)系統(tǒng)設(shè)計(jì)依據(jù)Table 3 Design basis of UAV system for crack monitoring of the Chinese ancient wooden buildings

圖4 無人機(jī)系統(tǒng)示意圖Fig.4 Diagram of UAV system
2)該無人機(jī)為四旋翼,可直升直降、穩(wěn)定懸停、姿勢轉(zhuǎn)換、小角度轉(zhuǎn)彎,能夠在復(fù)雜的中國古建筑木結(jié)構(gòu)中使用;
3)該無人機(jī)搭設(shè)1200 萬像素(1200 萬pixels)相機(jī),可正直貼面拍攝,并獲取精確的二維圖像,用于中國古建筑木結(jié)構(gòu)裂縫寬度和長度確定;
4)該無人機(jī)無需搭載多相機(jī)和額外載重,抗風(fēng)要求低,故成本低。同時(shí),低需求使得該無人機(jī)在裝載高倍率電池后,能夠?qū)崿F(xiàn)40 min 巡航,可滿足中國古建筑木結(jié)構(gòu)裂縫監(jiān)測要求;
5)該無人機(jī)使用適于穿透遮擋物的2.4 G 數(shù)傳元件,能夠在存在遮擋物的中國古建筑木結(jié)構(gòu)中實(shí)現(xiàn)實(shí)時(shí)數(shù)傳,提高航線規(guī)劃精度,提升無人機(jī)飛行可靠性;
6)該無人機(jī)能夠獲取機(jī)載照片拍攝時(shí)刻相機(jī)光心距離建筑物表面的垂直距離,即通過將超聲波元件連接在具有數(shù)傳的APM 飛控上,超聲波測距數(shù)據(jù)通過數(shù)傳發(fā)射到帶有接收器的PC 端,PC 端裝載Missionplanner 軟件,將超聲波元件程序嵌入軟件后即可讀取和采集距離信息,過程如圖5 所示。

圖5 無人機(jī)系統(tǒng)增設(shè)超聲波元件Fig.5 Adding ultrasonic components to UAV system
7)目前其他領(lǐng)域民用無人機(jī)多采用集成飛控結(jié)合Altizure、Pix4d、DJ1 GS pro、Rockycapture等非開源軟件進(jìn)行航線規(guī)劃。這些規(guī)劃軟件依賴于GUSS 元件,且航線自主優(yōu)化時(shí),多基于A*算法、D*算法、人工勢場法、蟻群算法等[6]。上述方法雖然能夠?qū)崿F(xiàn)航線規(guī)劃、智能避障和自主優(yōu)化,但是:1)過于依賴GPS 信號(hào),而中國古建筑木結(jié)構(gòu)中GPS 信號(hào)較弱;2)優(yōu)化路徑以最小耗能,最短路徑或最大化避障為指標(biāo),很難考慮中國古建筑木結(jié)構(gòu)飛行路徑的歷史、文化、宗教價(jià)值。例如,佛像、珍貴壁畫等附近雖有空間,但不宜飛行,而目前無人機(jī)系統(tǒng)無法判別飛行路徑周圍事物的價(jià)值。因此目前常用的航線規(guī)劃方法明顯不適合在中國古建筑木結(jié)構(gòu)裂縫監(jiān)測中使用。
針對(duì)中國古建筑木結(jié)構(gòu)內(nèi)GPS 信號(hào)弱的現(xiàn)象,本文設(shè)計(jì)的無人機(jī)系統(tǒng)可通過APM 飛控中的IMU(inertial measurement unit)模塊實(shí)現(xiàn)慣性控制,IMU 慣性模塊中的加速度器、陀螺儀、電子羅盤、壓力傳感器可在低GPS 信號(hào)的環(huán)境中獲取無人機(jī)的姿態(tài)、航向、速度、位置等導(dǎo)航參數(shù)。另外,中國古建筑木結(jié)構(gòu)裂縫監(jiān)測航線規(guī)劃精確固定,故本文放棄目前其他領(lǐng)域民用無人機(jī)的航線自主優(yōu)化功能,出現(xiàn)障礙則選擇平穩(wěn)降落,不進(jìn)行新航線自主設(shè)計(jì),確保結(jié)構(gòu)和無人機(jī)自身安全。使用IMU 慣性控制元件,輔助以RTK 導(dǎo)航,結(jié)合Missionplanner 軟件航線記憶功能,實(shí)現(xiàn)精確可靠的航線規(guī)劃。過程如下:監(jiān)測人員首先對(duì)裂縫監(jiān)測路徑進(jìn)行調(diào)研,確保所選路徑能夠獲取精確的裂縫信息,同時(shí)確保無人機(jī)在該路徑飛行時(shí)不會(huì)對(duì)中國古建筑木結(jié)構(gòu)的歷史、文化、宗教價(jià)值造成影響。確定路徑后,首飛需使用一體化遙控器人工控制無人機(jī)飛行,無人機(jī)中IMU 模塊將記錄可以描述飛行路徑和姿態(tài)的數(shù)據(jù),并實(shí)時(shí)通過數(shù)傳發(fā)送至PC 端的Missionplanner 軟件,.kmz 和.kml 文件可在.tlog 文件的基礎(chǔ)上創(chuàng)建,文件中包含首飛的所有信息,在低GPS 信號(hào)的環(huán)境中,飛行信息主要來自于IMU 慣性控制元件。將上述記錄的飛行信息再次輸入Missionplanner 軟件,通過數(shù)傳傳遞至無人機(jī),無人機(jī)將能執(zhí)行相同的飛行路線、飛行姿態(tài)等,以實(shí)現(xiàn)后續(xù)無人機(jī)自動(dòng)監(jiān)測,具體方式見圖6。

圖6 Missonplanner 軟件航線記憶Fig.6 Route memory function of Missionplanner
8)中國古建筑木結(jié)構(gòu)自身具有極強(qiáng)的歷史、文化、宗教價(jià)值,故本文設(shè)計(jì)的無人機(jī)具有多重安全保障,能夠確保無人機(jī)和結(jié)構(gòu)的安全,飛行可靠性好于目前其他領(lǐng)域無人機(jī)。安全保障1:加裝的超聲波元件,能夠自動(dòng)識(shí)別小于規(guī)定監(jiān)測距離的障礙。安全保障2:放棄航線自主優(yōu)化,采用航線記憶的方式進(jìn)行航線規(guī)劃。安全保障3:增設(shè)一體化遙控器,接收實(shí)時(shí)圖傳和數(shù)傳信號(hào),一旦出現(xiàn)危險(xiǎn)能夠及時(shí)開啟人工干預(yù)模式。
2.3 無人機(jī)懸停拍攝測試
中國古建筑木結(jié)構(gòu)裂縫監(jiān)測過程對(duì)機(jī)載照片的品質(zhì)要求高,無人機(jī)系統(tǒng)需根據(jù)擬定路徑緩慢飛行,懸停時(shí)采集監(jiān)測裂縫圖像,每次采集需正對(duì)裂縫拍攝。盡管中國古建筑木結(jié)構(gòu)裂縫監(jiān)測無人機(jī)系統(tǒng)工作環(huán)境風(fēng)速較小,但懸停時(shí)仍會(huì)受到高速轉(zhuǎn)動(dòng)的螺旋槳帶來的振動(dòng)影響,使得機(jī)載拍攝在相機(jī)曝光時(shí)間內(nèi)出現(xiàn)像移,模糊的機(jī)載成像會(huì)嚴(yán)重影響中國古建筑木結(jié)構(gòu)裂縫監(jiān)測結(jié)果。
通常采用光學(xué)傅里葉調(diào)制傳遞函數(shù)(modulation transfer function)衡量無人機(jī)懸停狀態(tài)下機(jī)載成像質(zhì)量[16],表達(dá)式如下:

式中:δ 為快門時(shí)間內(nèi)像移;N 為鏡頭固定參數(shù)。上述MTF 值越接近1 則證明機(jī)載照片質(zhì)量越高。其中,δ 是唯一變量,該變量通常采用IMETUM非接觸式測量儀獲取[8]。根據(jù)文獻(xiàn)[16]可知,無人機(jī)在無環(huán)境風(fēng)影響時(shí),機(jī)載相機(jī)成像快門1/500 s,成像物距小于4 m 時(shí),機(jī)載相機(jī)的轉(zhuǎn)動(dòng)和平動(dòng)像移遠(yuǎn)小于像元尺寸,不會(huì)造成像質(zhì)的模糊。因?yàn)橹袊沤ㄖ窘Y(jié)構(gòu)內(nèi)部空間有限,成像物距往往小于4 m,故本文的無人機(jī)系統(tǒng)懸停時(shí)獲取的機(jī)載照片不會(huì)出現(xiàn)像質(zhì)模糊。為直觀說明本文的無人機(jī)系統(tǒng)獲取的機(jī)載照片不存在模糊現(xiàn)象。令無人機(jī)系統(tǒng)處于懸停狀態(tài),正對(duì)實(shí)驗(yàn)室墻面紅色目標(biāo)物連續(xù)拍攝10 次。提取紅色目標(biāo)物上邊界的像素點(diǎn)個(gè)數(shù),結(jié)合機(jī)載相機(jī)像素解析度(mm/pixel)和物距,分別計(jì)算10 張照片中紅色目標(biāo)物上邊界的長度,結(jié)果均為10 mm,由此可知本文無人機(jī)系統(tǒng)懸停時(shí)獲取的機(jī)載照片沒有出現(xiàn)像質(zhì)模糊現(xiàn)象,過程如圖7 所示。
3 相機(jī)系統(tǒng)設(shè)計(jì)
在無人機(jī)系統(tǒng)滿足監(jiān)測所需精度的基礎(chǔ)上,相機(jī)系統(tǒng)也應(yīng)能夠提供精度較高的照片。本部分分別介紹了相機(jī)系統(tǒng)的畸變矯正過程,像素解析度標(biāo)定過程和基于特征點(diǎn)的機(jī)載照片拼接過程。
3.1 相機(jī)畸變矯正
無人機(jī)搭載的廣角相機(jī)易出現(xiàn)鏡頭畸變,這會(huì)影響中國古建筑木結(jié)構(gòu)裂縫的監(jiān)測精度。本部分采用棋盤格配合MATLAB 中Camera Calibrator工具箱對(duì)機(jī)載廣角相機(jī)拍攝照片出現(xiàn)的桶形畸變進(jìn)行校正。矯正所用原始圖像為不同角度拍攝的9 張棋盤格圖像(圖8(a))。MATLAB 中的Camera Calibrator 工具箱能夠自動(dòng)檢測棋盤格圖像的角點(diǎn),并提取坐標(biāo)。對(duì)提取坐標(biāo)后的圖像進(jìn)行標(biāo)定,計(jì)算相機(jī)的內(nèi)參和外參,同時(shí)修正相機(jī)畸變(圖8(b))。使用最小二乘法估算實(shí)際存在的桶形畸變參數(shù),最后使用極大似然法提高估計(jì)精度,矯正平均誤差為2.76 像素(2.76 pixels),矯正誤差見圖8(c)。
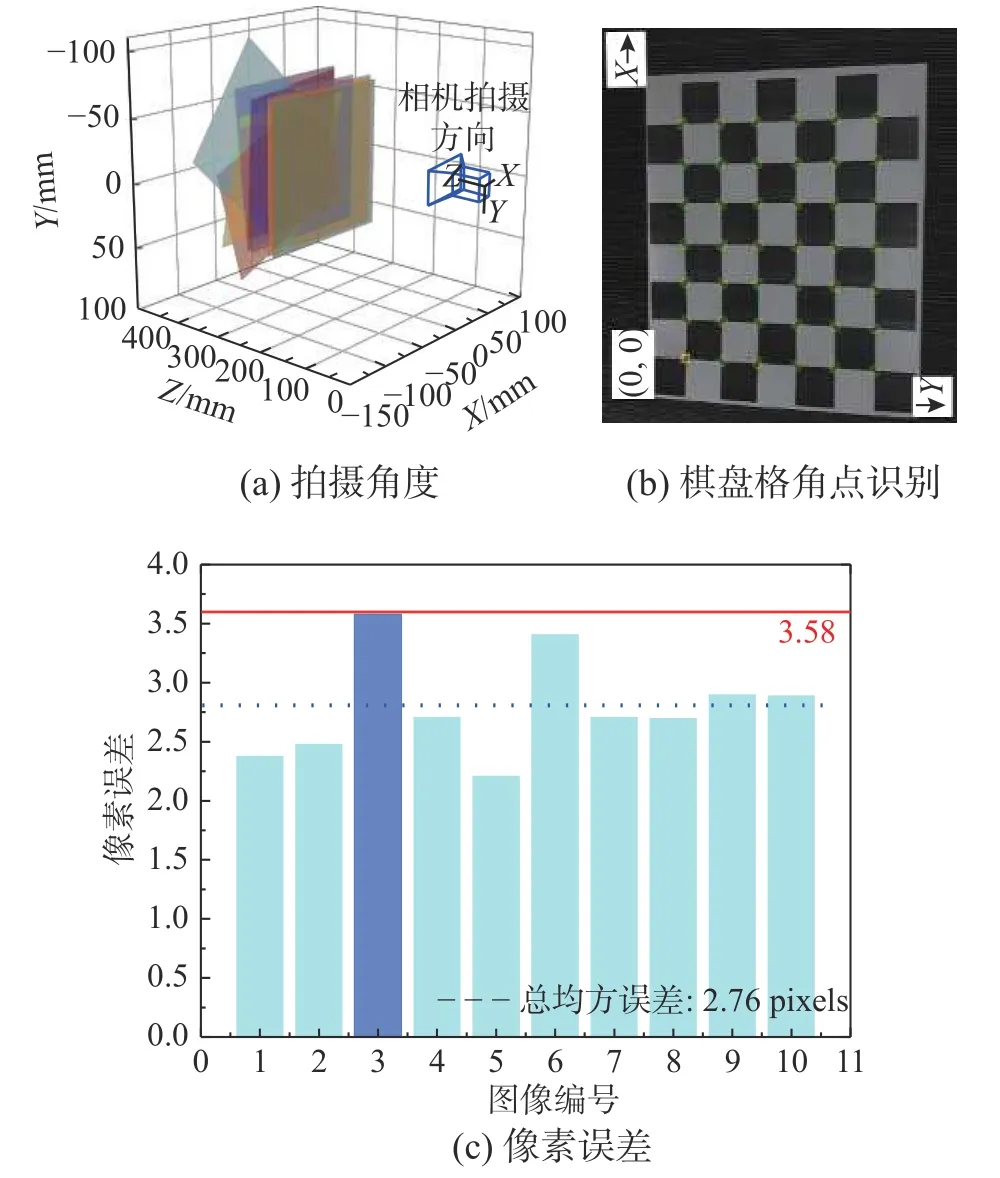
圖8 機(jī)載廣角相機(jī)桶形畸變修正Fig.8 Barrel distortion correction of airborne wide angle camera
3.2 像素解析度標(biāo)定
為了實(shí)現(xiàn)中國古建筑木結(jié)構(gòu)裂縫寬度與長度尺寸的準(zhǔn)確測量,需要獲取相機(jī)系統(tǒng)的像素解析度(mm/pixel)。像素解析度通常采用下式描述:

式中:J 為像素解析度;a 為物體實(shí)際尺寸(本文代表實(shí)際裂縫長度或?qū)挾?;a''為成像的像素?cái)?shù);l 為物距;f 為鏡頭焦距;d 為相機(jī)傳感器邊長物理尺寸;d'為相機(jī)傳感器對(duì)應(yīng)邊的像素?cái)?shù)。
本節(jié)使用傳統(tǒng)的平行線測量法,用機(jī)載相機(jī)對(duì)間距為5 mm、10 mm、15 mm、20 mm、25 mm的標(biāo)準(zhǔn)平行線進(jìn)行多次拍攝,確保機(jī)載相機(jī)主軸與平行線標(biāo)定板垂直,并調(diào)節(jié)拍攝距離從20 cm變化至100 cm,拍攝間隔20 cm。對(duì)照片進(jìn)行畸變矯正后,分別獲取相同物距下不同間距平行線的像素解析度平均值,獲取像素解析度與物距的關(guān)系曲線,如圖9。
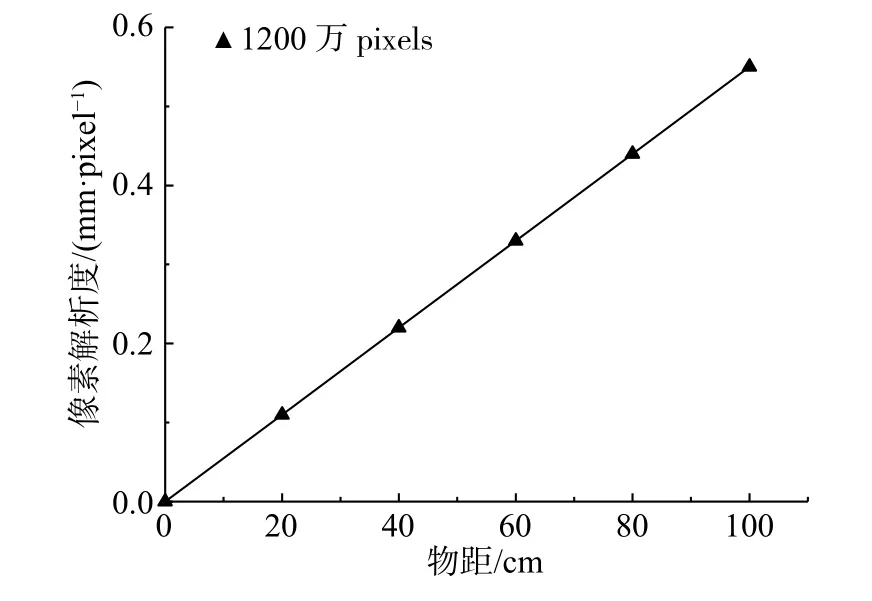
圖9 像素解析度與物距的關(guān)系曲線Fig.9 Relation curve between physical size of pixel and object distance
3.3 基于特征點(diǎn)的機(jī)載照片拼接
中國古建筑木結(jié)構(gòu)裂縫監(jiān)測過程中,無人機(jī)系統(tǒng)往往采用貼面正攝的方式獲取圖像,拍攝距離近、相機(jī)廣角有限、木結(jié)構(gòu)裂縫長等因素,使得中國古建筑木結(jié)構(gòu)裂縫監(jiān)測過程中需要引入圖像拼接技術(shù),并基于拼接后的機(jī)載照片識(shí)別裂縫。圖像拼接技術(shù)的核心為圖像配準(zhǔn),目前低計(jì)算量,高匹配精度,高魯棒性的基于特征點(diǎn)的配準(zhǔn)方法被廣泛應(yīng)用在無人機(jī)領(lǐng)域。特征點(diǎn)配準(zhǔn)中特征點(diǎn)提取和特征點(diǎn)匹配方法眾多[9],本文需要根據(jù)無人機(jī)系統(tǒng)獲取的中國古建筑木結(jié)構(gòu)裂縫圖像特征進(jìn)行選取和改進(jìn)。
使用無人機(jī)對(duì)鋼結(jié)構(gòu)和混凝土結(jié)構(gòu)裂縫進(jìn)行監(jiān)測時(shí),因拍攝距離足夠且裂縫較為細(xì)小,因此并未引入圖像拼接技術(shù)[8],故在裂縫監(jiān)測領(lǐng)域并沒有適合的參考方法。在使用無人機(jī)進(jìn)行災(zāi)后評(píng)估和地形測繪時(shí),經(jīng)常使用圖像拼接技術(shù),但這種情況屬于遙感航拍。在特征點(diǎn)提取時(shí),湖泊、森林和公路易于提取,故常規(guī)的特征提取方法均可適用[9]。中國古建筑木結(jié)構(gòu)裂縫監(jiān)測時(shí)機(jī)載照片往往僅為木紋和裂縫,能夠提取的特征點(diǎn)較少,影響圖像拼接和后續(xù)裂縫特征的提取。本文針對(duì)上述現(xiàn)象提出一種改進(jìn)的SIFT 特征點(diǎn)提取方法,該方法可以對(duì)圖像特征點(diǎn)進(jìn)行增強(qiáng),且對(duì)于圖像平移、旋轉(zhuǎn)、縮放變換等具有不變性,對(duì)光線變化、仿射變換、拍攝噪聲等具有魯棒性,能夠解決中國古建筑木結(jié)構(gòu)裂縫監(jiān)測機(jī)載照片特征點(diǎn)少的問題。為驗(yàn)證本文改進(jìn)的特征點(diǎn)提取算法的有效性,以本文設(shè)計(jì)的無人機(jī)系統(tǒng)獲取的木構(gòu)件照片為樣本,對(duì)其進(jìn)行旋轉(zhuǎn)、縮放和亮度變化處理(即無人機(jī)拍攝照片常見現(xiàn)象)。以提取特征點(diǎn)數(shù)量和提取時(shí)間為指標(biāo),比較本文改進(jìn)的SIFT 特征點(diǎn)提取方法和目前圖像拼接過程中常用的Harris 算法、Moravec 算法、SIFT 算法。特征點(diǎn)提取效果見圖10,本部分僅展示基于原圖的特征點(diǎn)提取效果,比較結(jié)果見表4。從比較結(jié)果可以清晰的看出本文改進(jìn)的SIFT 特征點(diǎn)提取方法,提取時(shí)間適中,能夠提取更多的特征點(diǎn),可解決中國古建筑木結(jié)構(gòu)裂縫監(jiān)測圖像特征點(diǎn)少的問題。

圖10 特征點(diǎn)提取方法比較Fig.10 Comparison of feature point extraction methods

表4 特征點(diǎn)提取算法比較結(jié)果Table 4 Comparison results of various algorithms
特征點(diǎn)提取后需要對(duì)特征點(diǎn)進(jìn)行匹配,災(zāi)后評(píng)估和地形測繪時(shí)無人機(jī)獲取的遙感圖像拼接精度不需達(dá)到mm 級(jí)別,故往往采用基于歐氏距離函數(shù)的BBF 特征點(diǎn)匹配算法,上述算法會(huì)出現(xiàn)誤匹配特征點(diǎn),拼接精度不高,但可滿足航拍要求[9]。在中國古建筑木結(jié)構(gòu)裂縫監(jiān)測過程中,圖像拼接精度需要達(dá)到0.1 mm,誤匹配特征點(diǎn)的出現(xiàn)將極大的降低匹配精度。為滿足上述要求,本文在特征點(diǎn)匹配后增加RANSAC 算法:1)該算法首先隨機(jī)選取4 對(duì)匹配特征點(diǎn),要求任意3 對(duì)不能共線,并計(jì)算單應(yīng)性矩陣H;2)計(jì)算其余匹配點(diǎn)經(jīng)過單應(yīng)性矩陣變換后的對(duì)應(yīng)點(diǎn)位置坐標(biāo)與實(shí)際位置的重投影誤差,該誤差值涵蓋單應(yīng)性矩陣計(jì)算誤差和圖像點(diǎn)測量誤差;3)重投影誤差小于閾值則為內(nèi)點(diǎn)(通過將像素點(diǎn)距離轉(zhuǎn)換為物理坐標(biāo)距離,對(duì)應(yīng)的物理坐標(biāo)誤差應(yīng)小于中國古建筑木結(jié)構(gòu)裂縫測量精度,進(jìn)而確定閾值),否則為外點(diǎn);4)重復(fù)上述步驟(通過置信區(qū)間、內(nèi)點(diǎn)比例、每次所需樣本數(shù)計(jì)算得到可變的迭代次數(shù)k,實(shí)際迭代次數(shù)大于計(jì)算值即停止迭代),選取內(nèi)點(diǎn)最多點(diǎn)集(以重投影誤差構(gòu)造的代價(jià)函數(shù)值最小),獲取最優(yōu)單應(yīng)性矩陣H。引入上述算法可以實(shí)現(xiàn)機(jī)載相片特征點(diǎn)精確匹配。以本文設(shè)計(jì)的無人機(jī)系統(tǒng)獲取的機(jī)載照片為例,照片首先使用本文提出的改進(jìn)的SIFT 特征點(diǎn)提取方法,以有效匹配特征點(diǎn)數(shù)量為指標(biāo),比較本文結(jié)合RANSAC 算法后的BBF特征點(diǎn)匹配算法與基礎(chǔ)的BBF 算法,比較結(jié)果見圖11 和表5。比較結(jié)果可充分證明結(jié)合RANSAC算法后的BBF 特征點(diǎn)匹配算法能夠有效剔除誤匹配特征點(diǎn),進(jìn)而提高匹配精度,將原本的粗匹配轉(zhuǎn)為精匹配。
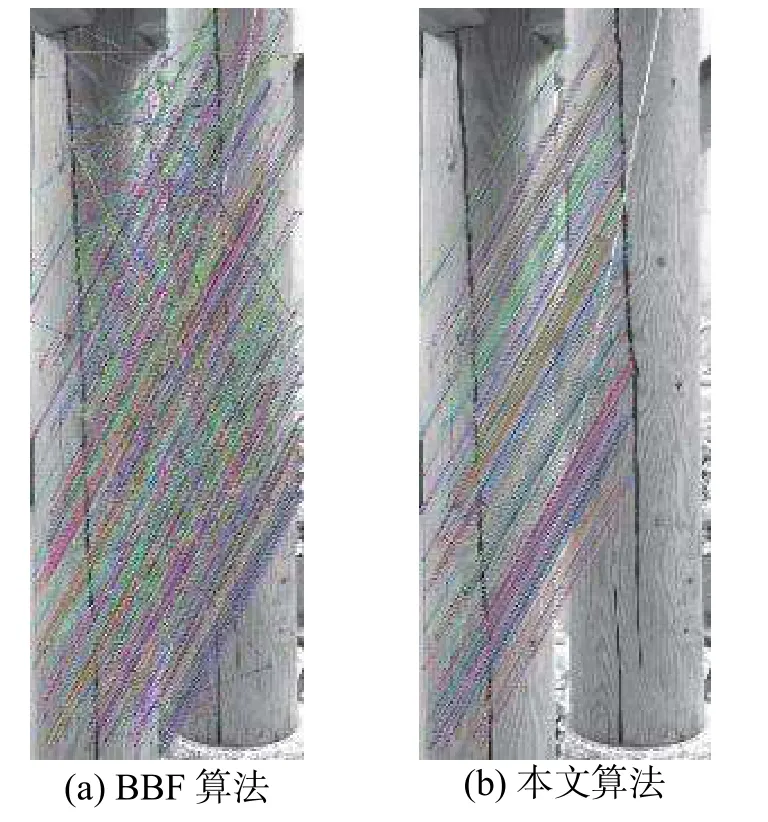
圖11 特征點(diǎn)匹配算法比較Fig.11 Comparison of feature point matching algorithms
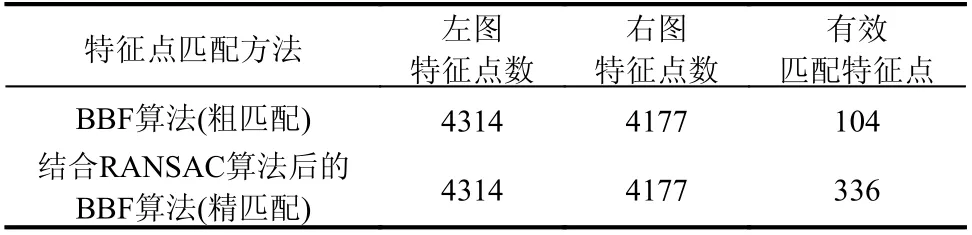
表5 不同特征點(diǎn)匹配方法的比較Table 5 Comparison of different feature point matching methods
4 圖像處理系統(tǒng)設(shè)計(jì)
本節(jié)對(duì)圖像處理系統(tǒng)中的預(yù)處理算法、裂縫提取算法、構(gòu)件尺寸和構(gòu)件裂縫尺寸獲取算法進(jìn)行介紹,并使用實(shí)驗(yàn)室木構(gòu)件對(duì)上述算法進(jìn)行驗(yàn)證。
4.1 圖像預(yù)處理
在使用無人機(jī)對(duì)中國古建筑木結(jié)構(gòu)裂縫進(jìn)行監(jiān)測時(shí),原始機(jī)載照片存在成像光線不均、拍攝噪聲多、圖像對(duì)比度差等諸多問題,這些問題會(huì)嚴(yán)重影響裂縫監(jiān)測精度。在裂縫提取前對(duì)機(jī)載照片的預(yù)處理十分重要,圖12 展示了本節(jié)所用預(yù)處理算法流程。

圖12 機(jī)載照片預(yù)處理過程Fig.12 Airborne photo preprocessing process
灰度變換:將RGB 圖像轉(zhuǎn)為灰度圖降低后續(xù)圖像處理的計(jì)算成本和因顏色復(fù)雜帶來的噪聲,處理結(jié)果見圖13(b)。
中值濾波:本文在選取濾波方法時(shí),將中值濾波與常用的均值濾波、雙邊濾波和導(dǎo)向?yàn)V波進(jìn)行了比對(duì),發(fā)現(xiàn)中值濾波能夠很好的抑制木結(jié)構(gòu)構(gòu)件裂縫背景中的塊狀和點(diǎn)狀噪聲,對(duì)裂縫邊界保存完好,并無邊緣梯度翻轉(zhuǎn)現(xiàn)象,處理結(jié)果見圖13(c)。值得注意的是,所有的濾波方法均僅能處理點(diǎn)狀和塊狀的噪聲,即降低孤立點(diǎn)的尖銳變化,抑制圖像矩陣中的突變值,而裂縫和木紋(與裂縫形態(tài)相近)無法被篩除。另外,濾波方法雖能對(duì)邊緣進(jìn)行保護(hù),但均會(huì)造成一定程度的邊緣削減。因此在濾波處理后,需引入邊緣檢測算法。
邊緣檢測:尋找相鄰的像素灰度差異較大的像素總集,本質(zhì)是計(jì)算圖像各點(diǎn)上像素值的變化率,順著木構(gòu)件邊緣和裂縫方向的灰度值變化柔和,垂直于裂縫邊緣和裂縫方向的灰度值變化強(qiáng)烈。本小節(jié)選取邊緣檢測中常見的一階微分Sobel算子,以增強(qiáng)機(jī)載照片中裂縫邊緣的響應(yīng),處理結(jié)果見圖13(d)。在選取邊緣檢測算法時(shí),將一階微分Sobel 算子與常用的一階微分Prewitt 算子和二階微分Laplacian 進(jìn)行了比對(duì),發(fā)現(xiàn)一階微分Sobel 算子能夠清晰增強(qiáng)木構(gòu)件邊緣和裂縫邊緣,邊緣連續(xù)性好,可抑制噪聲且計(jì)算效率高。
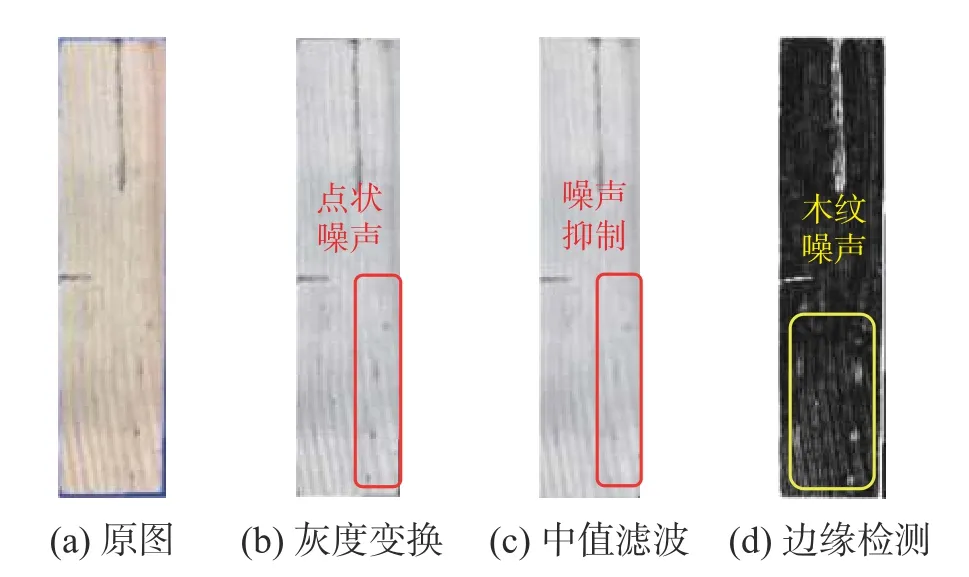
圖13 圖像預(yù)處理過程Fig.13 Image preprocessing process
綜上,使用灰度化對(duì)圖像降維簡化,使用中值濾波有效的抑制了圖像中的點(diǎn)狀和塊狀噪聲,使用一階微分Sobel 算子對(duì)構(gòu)件邊緣和裂縫邊緣進(jìn)行了增強(qiáng),但是預(yù)處理后與裂縫形態(tài)相似的木紋仍存在。
4.2 裂縫特征提取
裂縫特征提取是裂縫監(jiān)測中最為重要的環(huán)節(jié)。目前已有大量的裂縫特征提取方法用于鋼結(jié)構(gòu)和混凝土結(jié)構(gòu)裂縫監(jiān)測過程中。鋼結(jié)構(gòu)與混凝土結(jié)構(gòu)裂縫由荷載、溫度、收縮、疲勞等諸多因素引起,這些裂縫在機(jī)載照片中占比小(裂縫所占像素點(diǎn)數(shù)量極少),甚至和噪聲占比相當(dāng),大部分機(jī)載照片為背景[17 ? 18]。裂縫處的灰度值和背景的灰度值存在重疊,但裂縫的形態(tài)和噪聲以及背景存在較大差別,如圖14(a)和圖14(b)。因此研究人員通常使用基于形態(tài)受限玻爾茲曼機(jī)(RBM)[10]和深度卷積神經(jīng)網(wǎng)絡(luò)(DCNN)[11]提取裂縫信息。但中國古建筑木結(jié)構(gòu)裂縫與鋼結(jié)構(gòu)和混凝土結(jié)構(gòu)裂縫差異較大,中國古建筑木結(jié)構(gòu)裂縫像素點(diǎn)占比多(根據(jù)規(guī)范寬度大于10 mm 的裂縫被關(guān)注),且與背景灰度值差別較大,經(jīng)過預(yù)處理后存在與裂縫形態(tài)相似的木紋噪聲(見圖14(c)),木紋噪聲和裂縫的灰度值亦存在較大差別。因此目前常見的其他領(lǐng)域基于形態(tài)的裂縫特征提取方式無法被直接應(yīng)用,而基于灰度值的閾值分割可作為提取中國古建筑木結(jié)構(gòu)裂縫的手段。
圖14 不同結(jié)構(gòu)的裂縫示意圖Fig.14 Schematic diagram of cracks in different structures
圖15 中自上而下分別為應(yīng)縣木塔內(nèi)危險(xiǎn)裂縫、佛光寺內(nèi)危險(xiǎn)裂縫、北京交通大學(xué)古建筑木結(jié)構(gòu)亭子模型危險(xiǎn)裂縫。從圖中可清晰地看出本文提出的方法能夠很好地抑制背景和木紋噪聲,該文清晰地提出中國古建筑木結(jié)構(gòu)裂縫特征,裂縫連貫性好,不存在木紋和背景與裂縫粘連的現(xiàn)象,基于Hessian 矩陣優(yōu)化的自適應(yīng)閾值分割法適合于中國古建筑木結(jié)構(gòu)裂縫監(jiān)測。
圖15 裂縫特征提取方法比較Fig.15 Comparison of crack feature extraction methods
4.3 構(gòu)件邊界尺寸和裂縫尺寸獲取
4.3.1 構(gòu)件邊界邊長獲取
根據(jù)《古建筑木結(jié)構(gòu)維護(hù)與加固技術(shù)規(guī)范》[14]《古建筑修建工程施工及驗(yàn)收規(guī)范》[15],在確定危險(xiǎn)裂縫時(shí),首先需要確定裂縫所在構(gòu)件的長度和高度。本小節(jié)使用OpenCV 中cvContourArea 函數(shù)完成上述過程。為驗(yàn)證該方法可行性,使用其獲取實(shí)驗(yàn)室木構(gòu)件(圖13)上、下、左、右邊界像素點(diǎn)個(gè)數(shù),結(jié)合圖9 獲取邊界長度,結(jié)果見表6。

表6 實(shí)驗(yàn)室木構(gòu)件邊界尺寸與構(gòu)件裂縫尺寸 /cm Table 6 Boundary dimension and crack dimension of laboratory wood components
4.3.2 裂縫長度獲取
中國古建筑木結(jié)構(gòu)構(gòu)件裂縫往往沿木材纖維方向發(fā)展,不會(huì)出現(xiàn)類似混凝土結(jié)構(gòu)中無規(guī)律蔓延的裂縫。根據(jù)規(guī)范[14 ? 15],監(jiān)測人員在獲取中國古建筑木結(jié)構(gòu)裂縫長度時(shí),不需引入計(jì)算混凝土結(jié)構(gòu)裂縫的基于裂縫骨架的首尾點(diǎn)距離法、骨架相鄰點(diǎn)距離法和曲線擬合法[20]。僅需將圖像設(shè)為K×L 矩陣,獲取裂縫起點(diǎn)像素點(diǎn)坐標(biāo)(xa,ya)和裂縫終點(diǎn)像素點(diǎn)坐標(biāo)(xb,yb),并計(jì)算期間像素點(diǎn)個(gè)數(shù),結(jié)合圖9 獲取裂縫長度,裂縫長度獲取結(jié)果見表6。
4.3.3 裂縫寬度獲取
中國古建筑木結(jié)構(gòu)裂縫監(jiān)測時(shí),監(jiān)測人員需要獲取整條裂縫寬度最大位置處的尺寸,步驟如下:
1)圖像可視K×L 的矩陣,提取閾值分割后圖像中裂縫位置,裂縫位置的像素同樣可用矩陣形式表達(dá),整體裂縫可視為M×N 的矩陣。選取裂縫矩陣中第i 行的第一個(gè)裂縫像素點(diǎn)Aij和最后一個(gè)像素點(diǎn)Bip,其中i 為行數(shù),j 和p 為列數(shù)。
2)獲取初測裂縫寬度,公式如下:

3)以Aij為頂點(diǎn),向上下各作邊長為D 的正方形,計(jì)算框內(nèi)各個(gè)Bkp到頂點(diǎn)Aij的距離,見圖16。像素裂縫寬度為:

圖16 裂縫寬度獲取示意圖Fig.16 Schematic diagram of crack width acquisition
4)若i<M,i=i+1,循環(huán)3)的過程。否則得到:

5 驗(yàn)證分析
為驗(yàn)證上述無人機(jī)系統(tǒng),相機(jī)系統(tǒng)和圖像處理系統(tǒng)在中國古建筑木結(jié)構(gòu)裂縫監(jiān)測過程中的有效性,使用該系統(tǒng)對(duì)北京交通大學(xué)建立的中國古建筑木結(jié)構(gòu)亭子模型中的裂縫進(jìn)行監(jiān)測。
5.1 監(jiān)測模型
本次監(jiān)測對(duì)象為北京交通大學(xué)古建筑結(jié)構(gòu)研究所為服務(wù)于中國古建筑木結(jié)構(gòu)健康監(jiān)測所建立的中國古建筑木結(jié)構(gòu)亭子模型(如圖17(b))。此亭子模型以故宮咸福宮井亭(如圖17(a))為原型建立,木料選用紅松,相似比1∶1,結(jié)構(gòu)構(gòu)件尺寸和結(jié)構(gòu)構(gòu)件間的連接形式與原井亭完全相同。亭子模型保留中國古建筑木結(jié)構(gòu)基本組成部分,即臺(tái)基部分、木構(gòu)造部分、屋頂部分。該亭子模型保留這些部分的結(jié)構(gòu)功能,而去除美觀功能,例如保留斗拱均勻傳遞荷載,維持空間穩(wěn)定性的功能,去除斗拱上的漆飾。另外,中國古建筑木結(jié)構(gòu)屋頂多是美觀之用,在結(jié)構(gòu)中僅起到為木框架增加上部荷載的作用,故該模型中的屋頂可使用相同重量的鋼筋混凝土板代替。因此本文監(jiān)測對(duì)象與中國古建筑木結(jié)構(gòu)形制相同,能夠代表真實(shí)的中國古建筑木結(jié)構(gòu),以此亭子模型驗(yàn)證本文提出的系統(tǒng)的有效性是合理的。

圖17 監(jiān)測結(jié)構(gòu)示意圖Fig.17 Schematic diagram of monitoring structure
5.2 無人機(jī)路徑規(guī)劃
為取得高精度照片,無人機(jī)系統(tǒng)應(yīng)盡量靠近中國古建筑木結(jié)構(gòu)亭子模型構(gòu)件,但由于結(jié)構(gòu)形式復(fù)雜,很多情況無人機(jī)系統(tǒng)無法滿足上述要求,這也是大部分中國古建筑木結(jié)構(gòu)裂縫監(jiān)測過程中會(huì)遇到的問題。根據(jù)規(guī)范[14 ? 15],中國古建筑木結(jié)構(gòu)梁、柱裂縫寬度限值分別為10 mm 和15 mm,因此測量精度至少為1 mm。本系統(tǒng)相機(jī)照片分辨率為4032×3024,像素解析度最大值為1 mm/pixel,根據(jù)圖9 計(jì)算可知,無人機(jī)系統(tǒng)與中國古建筑木結(jié)構(gòu)構(gòu)件垂直距離不大于1.92 m。為了全面且經(jīng)常性的對(duì)中國古建筑木結(jié)構(gòu)亭子模型中危險(xiǎn)裂縫進(jìn)行監(jiān)測,使用2.2 小節(jié)中提出的方式進(jìn)行航線規(guī)劃。無人機(jī)系統(tǒng)懸停位置應(yīng)按照相機(jī)系統(tǒng)與目標(biāo)物垂直距離和單張相片最大拍攝面積確定,確保相鄰相片間重疊度在40%以上,以保證裂縫圖像拼接質(zhì)量。無人機(jī)系統(tǒng)巡航路徑如下:1)柱的監(jiān)測,每根柱子4 面均進(jìn)行拍攝,分別拍攝4 個(gè)柱,共16 個(gè)表面;2)梁的監(jiān)測,4 根梁連續(xù)拍攝,首先為外部順時(shí)針環(huán)繞拍攝,其次為內(nèi)部順時(shí)針環(huán)繞拍攝;3)斗拱的監(jiān)測,采用與梁相同的方式,分別對(duì)8 個(gè)平身科斗拱和4 個(gè)柱頭科斗拱進(jìn)行拍攝。中國古建筑木結(jié)構(gòu)亭子模型監(jiān)測過程如圖18 所示。
5.3 監(jiān)測結(jié)果
使用無人機(jī)系統(tǒng)按照上述路徑獲取中國古建筑木結(jié)構(gòu)亭子模型機(jī)載照片,對(duì)獲取的照片進(jìn)行矯正合成和預(yù)處理,并在提取裂縫后對(duì)圖像中構(gòu)件的邊界尺寸和構(gòu)件中裂縫的長度和寬度進(jìn)行識(shí)別。按照規(guī)范給出的限值確定構(gòu)件中的危險(xiǎn)裂縫,以便長期監(jiān)測危險(xiǎn)裂縫生長。上述過程如圖19所示,圖19(a)所示是柱A 裂縫處理情況,柱A位置見圖17(b)。圖19(b)所示是柱B 裂縫處理情況,柱B 位置見圖17(b)。圖19 依次是矯正合成、灰度變換、中值濾波、邊緣檢測、裂縫特征提取。

圖18 中國古建筑木結(jié)構(gòu)裂縫監(jiān)測系統(tǒng)工作過程Fig.18 Working process of crack monitoring system for the Chinese ancient wooden buildings
圖19 中國古建筑木結(jié)構(gòu)亭子模型裂縫監(jiān)測結(jié)果Fig.19 Monitoring results of cracks in wooden pavilion model of Chinese ancient building
中國古建筑木結(jié)構(gòu)亭子模型中A 柱、B 柱邊界尺寸和A 柱、B 柱表面裂縫的長度與寬度監(jiān)測結(jié)果見表7,裂縫編號(hào)如圖19 所示。在表7 中,使用人工實(shí)測結(jié)果驗(yàn)證本文提出方法的準(zhǔn)確性。
從表7 中可以看出,中國古建筑木結(jié)構(gòu)裂縫監(jiān)測系統(tǒng)能夠精準(zhǔn)的識(shí)別出危險(xiǎn)裂縫。柱A 中裂縫1 長度已經(jīng)達(dá)到柱高1/3,按照規(guī)范[14 ? 15]給出的限值,該裂縫屬于危險(xiǎn)裂縫。柱A 中裂縫2 長度和寬度均小于規(guī)范[14 ? 15]給出的限值,不屬于危險(xiǎn)裂縫。柱B 中裂縫4 長度和寬度同樣小于規(guī)范[14 ? 15]給出的限值,不屬于危險(xiǎn)裂縫。柱B 中裂縫5 和裂縫6 寬度均未達(dá)到10 mm 寬度限值,但長度均已超過柱高1/3,屬于危險(xiǎn)裂縫。后續(xù)將使用本文提出的中國古建筑木結(jié)構(gòu)裂縫健康監(jiān)測系統(tǒng),按照上述規(guī)劃路徑對(duì)裂縫1、裂縫5 和裂縫6 進(jìn)行長期的健康監(jiān)測,觀察裂縫生長情況。此系統(tǒng)自動(dòng)化性能高,因此裂縫監(jiān)測周期可以大大縮短,可以將原本幾月一次的人工檢測,變?yōu)閹滋煲淮蔚膶?shí)時(shí)、長期的健康監(jiān)測。
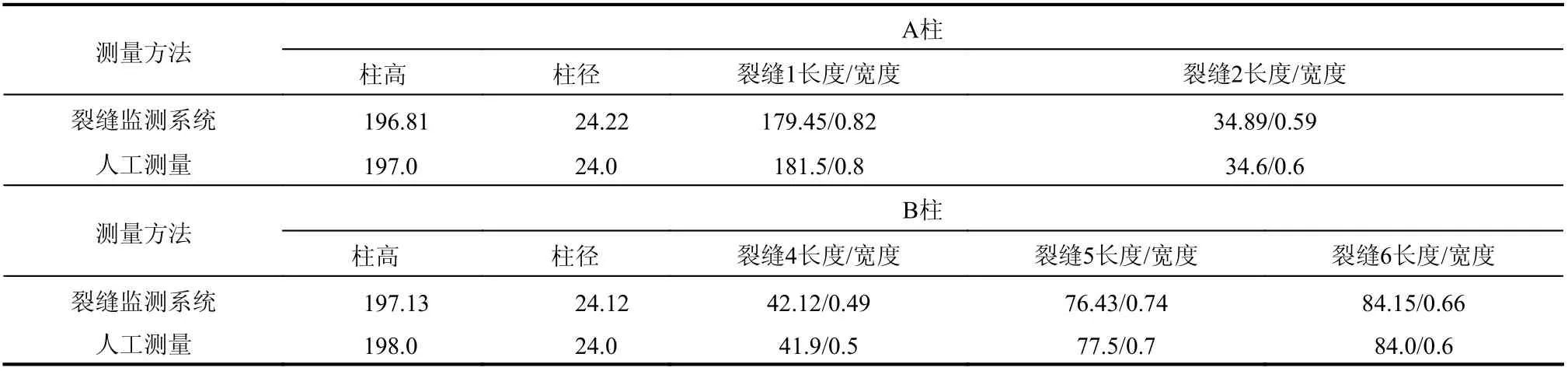
表7 中國古建筑木結(jié)構(gòu)亭子模型裂縫監(jiān)測結(jié)果 /cmTable 7 Monitoring results of cracks in wooden pavilion model of Chinese ancient building
6 結(jié)論
本文設(shè)計(jì)了一種基于UAV 和CV 的中國古建筑木結(jié)構(gòu)裂縫監(jiān)測系統(tǒng),該系統(tǒng)包括無人機(jī)系統(tǒng)、相機(jī)系統(tǒng)和圖像處理系統(tǒng)。
(1)在無人機(jī)系統(tǒng)中,本文設(shè)計(jì)了一款適合于中國古建筑木結(jié)構(gòu)裂縫監(jiān)測的無人機(jī),該無人機(jī)區(qū)別于目前其他領(lǐng)域已有的民用無人機(jī)。該無人機(jī)體量輕小、易于操控、續(xù)航持久。使用AMP 飛控中IMU 慣性控制元件,結(jié)合Missionplanner 軟件中航線記憶功能,實(shí)現(xiàn)了中國古建筑木結(jié)構(gòu)(低GPS 環(huán)境)下高精度裂縫監(jiān)測航線規(guī)劃。加入超聲波元件實(shí)現(xiàn)拍攝過程中相機(jī)光心到構(gòu)件表面垂直距離的獲取。將圖傳、數(shù)傳、超聲波元件、PC 端和一體化遙控器結(jié)合,為中國古建筑木結(jié)構(gòu)裂縫監(jiān)測過程提供多重安全保障。
(2)相機(jī)系統(tǒng)中,本文使用MATLAB 中Camera Calibration 工具箱修正了機(jī)載廣角相機(jī)的桶形畸變。使用平行線測量法獲取機(jī)載相機(jī)的像素解析度。中國古建筑木結(jié)構(gòu)裂縫監(jiān)測過程受拍攝距離和相機(jī)廣角等因素影響,需要引入圖像拼接技術(shù)、特征點(diǎn)提取和特征點(diǎn)匹配技術(shù)是圖像拼接的關(guān)鍵。針對(duì)特征點(diǎn)提取方法,本文提出了一種改進(jìn)的SIFT 特征點(diǎn)提取方法,該方法可對(duì)中國古建筑木結(jié)構(gòu)裂縫監(jiān)測機(jī)載相片中特征點(diǎn)進(jìn)行增強(qiáng),有效解決了中國古建筑木結(jié)構(gòu)裂縫監(jiān)測過程中無人機(jī)獲取機(jī)載相片特征點(diǎn)少的問題。針對(duì)特征點(diǎn)匹配方法,本文在BBF 特征點(diǎn)算法的基礎(chǔ)上增加了RANSAC 算法,減少特征點(diǎn)誤匹配現(xiàn)象,提高了圖像拼接精度,使原本“粗匹配”轉(zhuǎn)為“精匹配”,進(jìn)而提升裂縫尺寸測量精度。
(3)在圖像處理系統(tǒng)中,考慮中國古建筑木結(jié)構(gòu)裂縫監(jiān)測過程中機(jī)載照片的特點(diǎn),本文引入灰度變換、中值濾波、一階微分Sobel 算子邊緣檢測對(duì)已合成矯正的機(jī)載照片進(jìn)行預(yù)處理。考慮中國古建筑木結(jié)構(gòu)裂縫特征,提出基于Hessian 矩陣優(yōu)化的自適應(yīng)閾值分割算法,有效地將中國古建筑裂縫從背景和木紋噪聲中提取。最后應(yīng)用基于計(jì)算機(jī)視覺的尺寸測量技術(shù),實(shí)現(xiàn)了構(gòu)件邊緣尺寸和裂縫尺寸的準(zhǔn)確測量,并通過實(shí)驗(yàn)室試件進(jìn)行了驗(yàn)證。
(4)通過北京交通大學(xué)古建筑結(jié)構(gòu)研究所建立的中國古建筑木結(jié)構(gòu)亭子模型驗(yàn)證上述系統(tǒng)的有效性和準(zhǔn)確性。基于設(shè)定的巡檢路徑,本文設(shè)計(jì)的監(jiān)測系統(tǒng)能夠?qū)崿F(xiàn)實(shí)時(shí)、長期的中國古建筑木結(jié)構(gòu)裂縫監(jiān)測。將中國古建筑木結(jié)構(gòu)裂縫監(jiān)測系統(tǒng)監(jiān)測結(jié)果與人工測量結(jié)果對(duì)比,驗(yàn)證了本系統(tǒng)的有效性和準(zhǔn)確性。
猜你喜歡
數(shù)學(xué)小靈通·3-4年級(jí)(2024年2期)2024-05-15 02:02:28
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
世界科學(xué)技術(shù)-中醫(yī)藥現(xiàn)代化(2020年2期)2020-07-25 02:05:36
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當(dāng)代陜西(2019年10期)2019-06-03 10:12:04
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
數(shù)學(xué)小靈通·3-4年級(jí)(2017年9期)2017-10-13 08:10:54
