基于ANSYS的撬毛機(jī)器人臂架運(yùn)動(dòng)及剛?cè)狁詈蠌?qiáng)度分析
2021-03-22 18:18:52王鋒王凱顏武剛
河南科技
2021年25期
王鋒 王凱 顏武剛

摘 要:目前,人工撬毛存在一定的安全風(fēng)險(xiǎn)。本文通過前期對(duì)中小型礦山采場(chǎng)爆破后頂板的情況進(jìn)行分析,研究出一款專門針對(duì)中小型礦山的小型撬毛機(jī)器人。撬毛臂架作為小型撬毛機(jī)器人的核心結(jié)構(gòu)件,整體強(qiáng)度直接影響撬毛機(jī)器人能否正常使用。通過ANSYS對(duì)撬毛臂架進(jìn)行整體力學(xué)分析,了解結(jié)構(gòu)設(shè)計(jì)上的薄弱位置,從而更好地優(yōu)化撬毛機(jī)器人。
關(guān)鍵詞:撬毛;機(jī)器人;ANSYS
中圖分類號(hào):TD401;TP241 文獻(xiàn)標(biāo)識(shí)碼:A 文章編號(hào):1003-5168(2021)25-0024-03
Analysis of the Movement and Rigid-Flexible Coupling Strength of the Arm of a Crow Robot Based on ANSYS
WANG Feng WANG Kai YAN Wugang
(Hunan Chuangyuan High-tech Machinery Co., Ltd., Changsha Hunan 410205)
Abstract: At present, there is a certain safety risk in manual crushing. Through analyzing the situation of the roof after blasting in the mine stope in the early stage, this paper has developed a kind of miniaturized crushing robot which is specially used in small and medium-sized mines, as the core structural component, the strength of the whole structure directly affects whether the crushing robot can be used normally or not. Through the whole mechanics analysis of ANSYS, the weak position of the structure design can be known, to better optimize the crushing robot.
Keywords: crushing;robot;ANSYS
隨著礦山行業(yè)配套軟硬件的發(fā)展,機(jī)械化采礦技術(shù)得到廣泛應(yīng)用。當(dāng)前大中型礦山采用機(jī)械化的撬毛臺(tái)車進(jìn)行撬毛作業(yè),在提高生產(chǎn)效率的同時(shí),大大降低了人工作業(yè)的勞動(dòng)強(qiáng)度和安全風(fēng)險(xiǎn)。然而,機(jī)械化應(yīng)用在國(guó)內(nèi)中小型礦山的推進(jìn)速度依然很慢,目前大多數(shù)中小型礦山仍然依靠人工進(jìn)行撬毛作業(yè),冒頂事故時(shí)有發(fā)生,存在極大的安全隱患。本文主要針對(duì)中小型礦山撬毛機(jī)器人開展相關(guān)研究[1-2]。
1 整機(jī)介紹
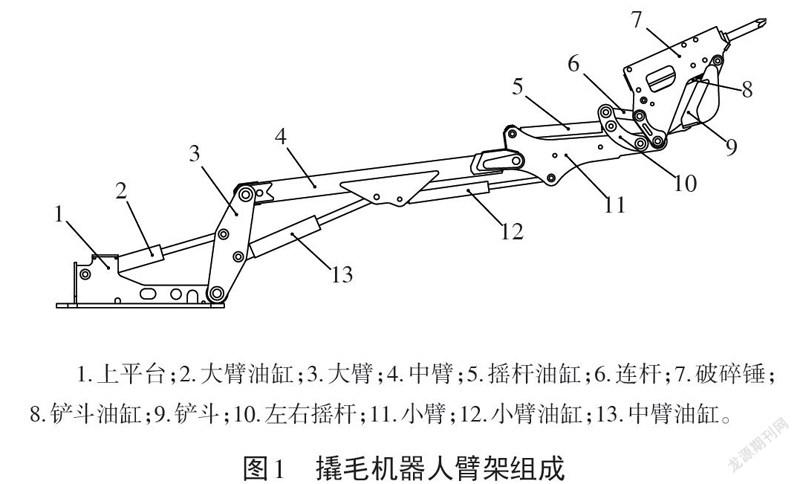
撬毛機(jī)器人主要由行走底盤、臂架總成、工作裝置總成、上車平臺(tái)總成(包含電機(jī)泵組總成、覆蓋件總成、液壓油箱、電纜卷筒及電控柜回轉(zhuǎn)減速機(jī)等)、液壓系統(tǒng)以及電氣系統(tǒng)等組成。
撬毛機(jī)器人的主要技術(shù)特點(diǎn):①模塊化設(shè)計(jì),拆裝、運(yùn)輸及維修方便;②作業(yè)范圍廣,超長(zhǎng)靈活的臂架系統(tǒng),可以對(duì)爆破后的頂板及側(cè)幫浮石進(jìn)行撬毛;③采用履帶底盤行走系統(tǒng),地面適應(yīng)性好,通過性強(qiáng),維護(hù)成本低,操作簡(jiǎn)單;④整體外形結(jié)構(gòu)設(shè)計(jì)緊湊,適合在采場(chǎng)內(nèi)的狹小空間作業(yè);⑤遠(yuǎn)程可視化遙控作業(yè),可自行至采場(chǎng)任何位置,作業(yè)效率高,施工成本低,安全風(fēng)險(xiǎn)小。……
登錄APP查看全文