基于增益調度法的傾轉旋翼控制系統設計
2021-03-21 07:26:38宋曉東
彈箭與制導學報 2021年6期
關鍵詞:設計
宋曉東,吳 斌,桑 濤
(北京理工大學宇航學院,北京 100081)
0 引言
隨著科學技術的發展,無人機被廣泛應用于各個領域。相比于載人機,無人機具有成本低、體積小、研制周期短等優勢,更加適合小范圍的勘測、偵察等任務。旋翼無人機能夠隨時隨地起降,完成一些近距離、低速任務;雖然固定翼無人機在長遠距離工作效率更高,但無法長時間、最低巡航速度以下正常工作。因此,具備垂直起降功能的無人機應運而生。
為實現傾轉旋翼無人機多種飛行模態,對其控制系統設計提出了更高的要求。尤其在過渡過程,起始階段和末尾階段力學特性不同。以垂直起飛為例,傾轉旋翼機在起始階段通過螺旋槳拉力克服重力;在合適的前向速度下,短艙開始傾轉,隨著速度的上升,機翼氣動力逐漸起主導作用,最終達到機翼升力克服重力,螺旋槳拉力克服阻力的巡航狀態。模態轉變過程中,無人機具有強烈的非線性特性,傳統的線性控制器無法滿足控制需求;在進行垂直起降時,由于飛行器的彈道傾角在90°時存在奇異點問題[1],給控制系統設計帶來了一定的難度。國內外學者對此提出了多種控制方案。文獻[2]采用新型自抗擾滑模控制算法,設計了內外部干擾觀測器,將模型誤差和耦合視為干擾進行補償控制;文獻[3]提出了一種基于模糊控制的傾轉控制方法,使傾轉旋翼無人機能夠實現平穩過渡飛行;文獻[4]采用了非線性動態逆設計了全包線飛行控制率。文獻[5]采用了BP神經網絡對PID參數進行調整從而滿足控制需求,目前這種方法工程應用難度大,并且依賴于可靠的數據收集。文獻[6]在研究垂直起降控制器驗證過程中,為了避開奇異點問題,設計的航跡也并非真正意義上的垂直于水平面,而是前向有一定的傾角。
文中對傾轉四旋翼飛機進行建模,建立了跟隨旋翼傾轉的短艙坐標系;采用了增益調度的方法,將短艙傾角作為調參變量,將傾角分為多個工作點,實現了對傾轉旋翼機過渡過程中高度的穩定控制,使其平穩過渡。同時采用誤差四元數方法進行姿態控制,避免了垂直起降過程中歐拉方程出現的奇異點問題。
1 傾轉旋翼機模型
1.1 布局設計
研究對象采用常規氣動布局[7]。動力采用4點式動力布局,飛機布局和傾轉機構如圖1和圖2所示。

圖1 傾轉機構

圖2 飛機布局
傾轉旋翼無人機在垂直起降模式飛行時,通過4個電機的差動進行姿態控制,與四旋翼無人機控制方案相同。在過渡飛行模式中,機體縱向平面z軸方向上,既存在螺旋槳拉力在垂直方向的分力,也存在機翼的氣動升力。巡航模式時旋翼產生的拉力用于克服阻力。
傾轉旋翼機基本參數如表1所示。考慮前后翼干擾問題、發動機干擾效應,進行空氣動力學分析,通過DATCOM氣動估算、CFD分析修正,確保氣動參數具有一定的可信度。
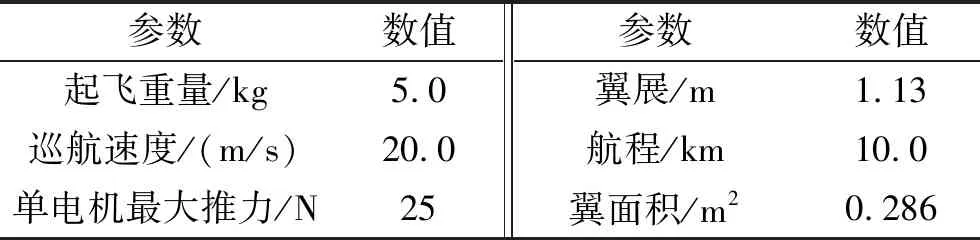
表1 傾轉旋翼機基本參數
1.2 數學模型
首先定義固連于電機的短艙坐標系Ot,如圖3所示,其原點與機體坐標系重合,該坐標系隨電機傾轉而繞其y軸旋轉。傾轉旋翼機在懸停狀態,定義短艙坐標系x軸方向與機體x軸同向,y軸方向與機體軸y軸方向相同[8]。
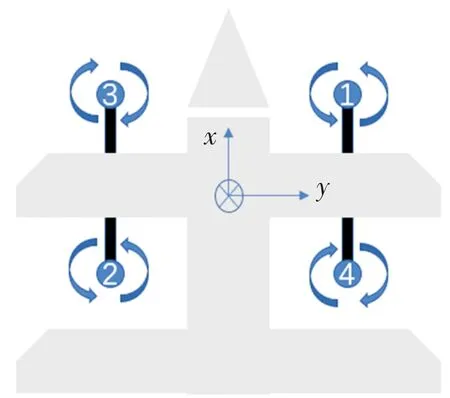
圖3 短艙坐標系
建立無人機空間六自由度模型:
(1)
(2)
(3)

(4)
(5)
作用在無人機上的力主要包含動力Fmotor,t,動力矩Mmotor,t[9]。
(6)
(7)
式中:下標t代表短艙坐標系;T為電機推力,下標1、2、3、4為電機序號。
氣動力和氣動力矩為:
(8)
Maero,t=
(9)

2 控制系統
傾轉旋翼機從垂直起飛到巡航的轉換是一個具有強烈非線性特性的過程[10]。文中在高度控制中,采用增益調度方法。其基本思想是在整個飛行包線內,將模型分為多個平衡工作點,每個平衡點處通過小擾動線性化方法得到線性模型,每個平衡點處設計線性控制器,最后利用插值擬合的方法使其成為參數可變的全局控制器。如圖4所示,內環所需的期望傾轉角度和期望高度由外環制導回路產生。
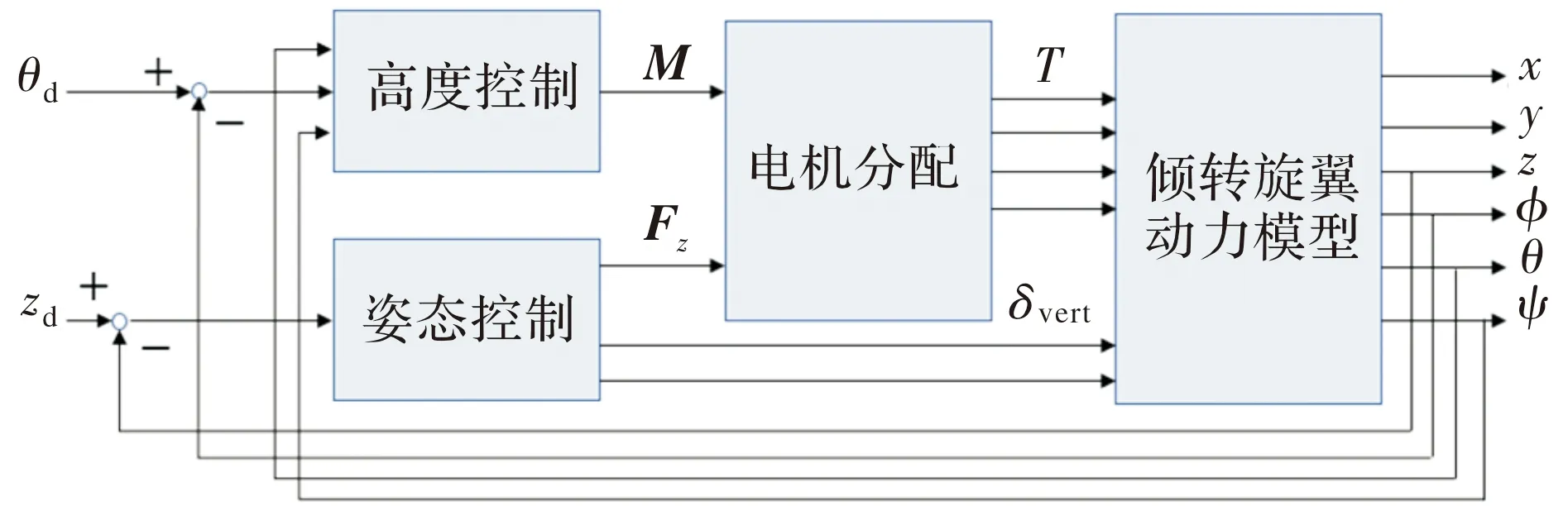
圖4 控制系統
2.1 高度控制
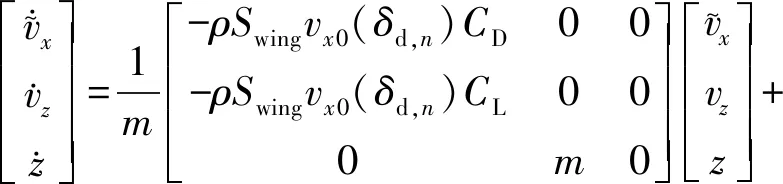
在垂直起降轉換到平飛過程中,短艙坐標系與機體坐標系的夾角從 轉換至 。根據增益調度法的原理,將該過程每間隔5°選取一個平衡點。每個平衡點對應一個傾轉角度δd,n,根據傾轉旋翼機在平衡點處受力和力矩平衡,可推導出:
(10)
(11)
式中:Tx0和tz0為平衡狀態時,機體坐標系下推力沿x軸和z軸方向的分量;vx0為平衡速度;δd,n為第n個平衡點的期望傾轉角。
根據式(11)即可得到所有工作點達到平衡狀態所需要的水平速度和推力大小。通過Matlab計算各個工作點平衡狀態如圖5所示。
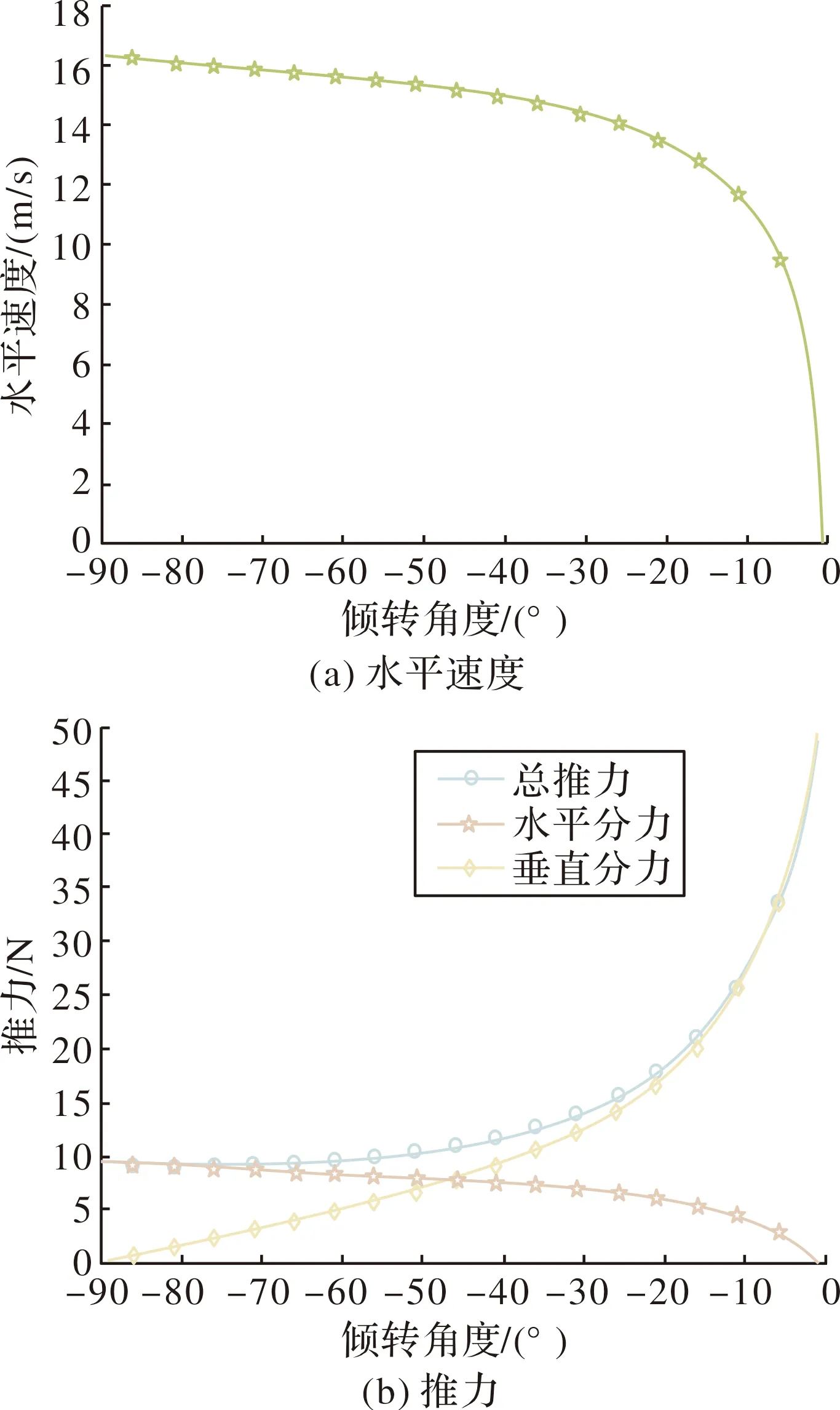
圖5 水平速度、推力與傾轉角度關系

(12)
(13)
式中:ΔTx和ΔTz為機體坐標系下發動機推力增量沿x軸和y軸方向的分量;δvert為升降舵面的偏轉角。
定理1 若線性定常系統{A,B}的可控矩陣
Sc=[BABA2B…An-1B]
(14)
則系統狀態完全可控的充要條件是該可控矩陣滿秩,即rankSc=n。
根據定理1可以證明該系統在-90°≤δd<0時滿秩,完全可控。在0°時,由于前向速度較低,升降舵面不足以產生足夠的控制力矩。根據爬升速度和高度誤差設計高度控制器,同時對前向速度進行控制,設計狀態反饋矩陣為:
(15)
式中,kvx(δd,n),kvz(δd,n),kz(δd,n),kδvert,vz(δd,n),kδvert,z(δd,n)∈R>0為增益系數。以δd,n為調度變量,通過Matlab對該系統每個工作點進行極點配置,得到每個參數的增益調度表。通過仿真試驗,將極點配置在-4附近時系統具有較好的動態特性,得到的增益調度關系曲線如圖6至圖10所示。
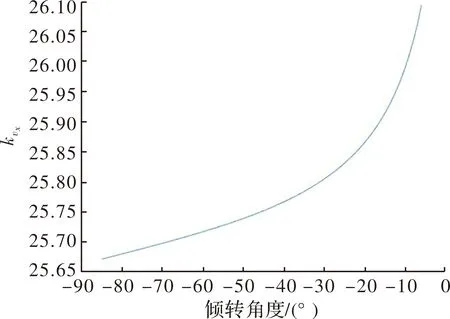
圖6 kvx與傾轉角度關系
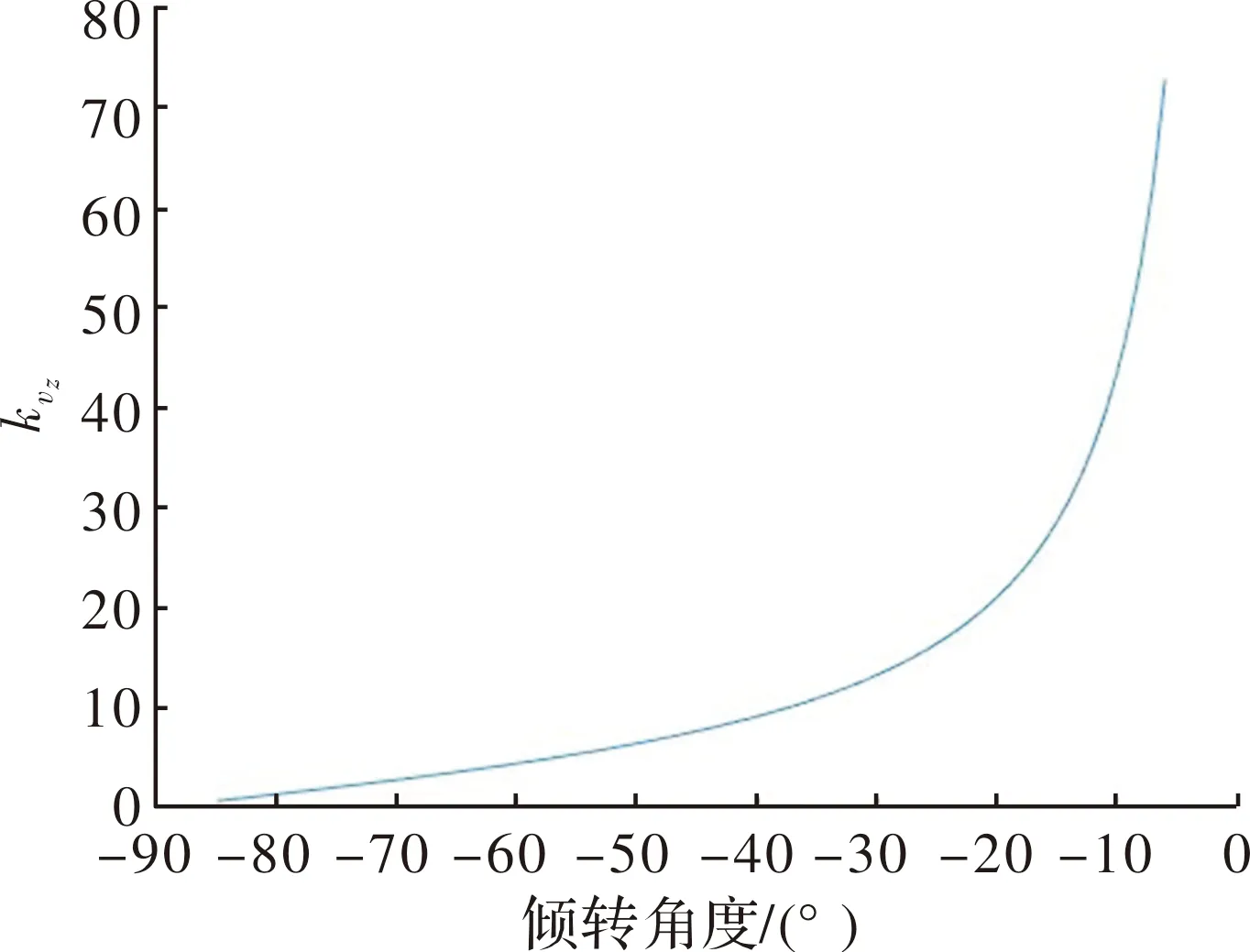
圖7 kvz與傾轉角度關系
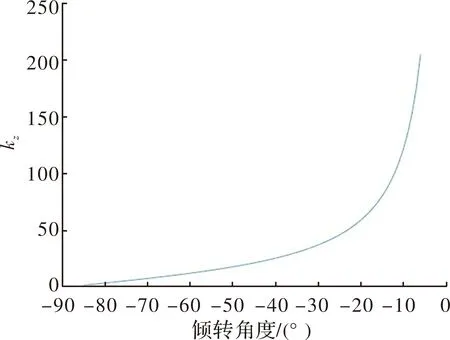
圖8 kz與傾轉角度關系
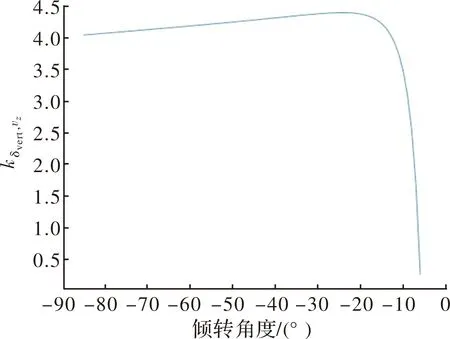
圖9 kδvert,vz與傾轉角度關系
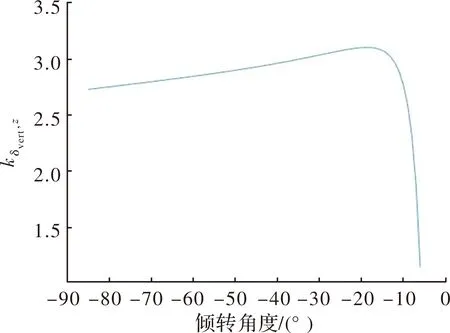
圖10 kδvert,z與傾轉角度關系
通過對5個參數計算結果簡單分析,可直觀地判斷其合理性。圖6為參數kvx增益調度關系曲線,該參數通過機體軸向速度誤差控制軸向的推力。在期望速度下,阻力大小與速度平方成線性關系,忽略模態轉換對阻力特性造成的影響時,系統的阻力變化較小,因此該參數變化范圍也較小。圖7和圖8為kvz和kz增益調度關系曲線,根據式(15)可知,通過PD型控制器對z軸方向推力分量進行控制。當傾轉旋翼機垂直起降時,氣動升力接近0,此時該參數數值較大以滿足推力控制需求。圖9和圖10為kδvert,vz和kδvert,z增益調度關系曲線,由圖可知,在-15°左右該參數急劇下降,原因是在0°~-15°范圍內,傾轉旋翼機的巡航速度較小,氣動舵面效率低。當達到-15°傾轉角后,氣動舵面開始發揮主要操縱作用,并隨著速度升高,舵效增強,參數變小以減少系統的超調量。實際使用時,該增益調度表通過地面計算,在線查表的方式,大大地降低了飛控系統計算量。
由于計算時忽略了舵面等因素對平衡速度的影響,并且真實阻力系數與氣動估算得到的系數存在偏差,在實際飛行控制中,傾轉旋翼機在各個平衡點的期望速度與計算值有一定偏差。當以期望速度飛行不足以提供足夠升力時,高度降低,導致下沉,vz變大。可通過對過程中工作點的水平平衡速度進行更新解決該問題,設計更新律為:
(16)
其中σ∈R>0為自適應增益。
2.2 姿態控制
在高度控制系統中,通過升降舵面對俯仰角進行控制,從而控制飛行器的高度變化。因此姿態控制中只再解決滾轉和偏航兩個方向的控制問題。當傾轉旋翼機的電機從0°傾轉至-90°時,飛機進入巡航狀態,同時也導致狀態方程中歐拉角度出現奇點[11]。因此,文中基于四元數法設計姿態控制器,避免了奇點問題。由于四元數直接表示姿態具有雙值性,即正負均可表示同一姿態角,因此在控制系統中采用姿態誤差四元數方法。該方法實質上是將用于表征姿態的四元數旋轉至期望姿態下的四元數。定義基于短艙坐標系的四元數:
(17)
式中:ηt為四元數標量部分;qt為向量部分。垂直起飛轉換至巡航模式時,傾轉機構由0°轉換至-90°。定義期望姿態四元數Qd=[ηdqd]T。
根據四元數的計算方法,誤差四元數可表示為:
Qe=Qe(ηe,qe)=Qd(ηt,qt)Qd(-ηd,qd)
(18)
(19)
(20)
式中:下標e表示差值;下標d表示期望值;上標×代表向量叉積,表達形式為:
(21)
角速度四元數可以用短艙坐標系Ot旋轉至期望坐標系Od來表示,即
(22)
根據式(4),可得到基于四元數的動力學模型為:
(23)
(24)
(25)
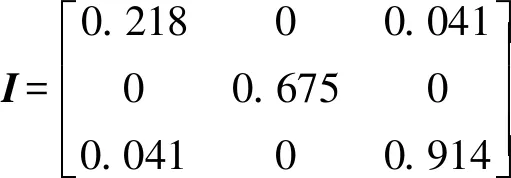
其中:μ為旋翼產生的控制力矩;d為除了旋翼產生的控制力矩以外的力矩。式(23)~式(25)描述了基于短艙坐標系的姿態四元數旋轉至期望四元數的過程。傾轉前后機構的變化導致系統慣量I的不確定性增強,為了消除I項的誤差[12],定義:
Iα=J(α)Γ
(26)
其中Γ=[I11I22I33I23I13I12]T,α∈R3×1,J(α)為關于α的轉換算子,其表達式為:
(27)
將Γ代入式(23)中得到:
(28)

(29)
設計姿態控制器的輸出量μ的表達式為:
(30)
式中:k1,k2>0;K1,K2為對稱正定矩陣,積分項用于補償d,下面分析系統的穩定性。
選取李雅普諾夫函數為:
(31)
對式(31)進行求導得到:
(32)
進一步求解,得到:
(33)

3 實驗驗證
所設計的驗證模型機質量為5 kg,巡航攻角設計為3°。控制芯片采用Cortex-A9,慣導系統采用L3GD20H角速率傳感器、LSM303D加速度計和磁航向計,其他航電為GPS和壓差空速計。
設計航跡為在機體坐標系(x,y,z)=(0,0,0)處垂直起飛至30 m高度,再沿著(x,y,z)=(210 m,0 m,30 m)、(210 m,410 m,30 m)、(0 m,410 m,30 m)和(0 m,410 m,30 m)四個點組成的矩形航跡飛行后,在(0 m,0 m,30 m)處垂直降落。轉彎過程采用BTT轉彎,傾轉過程設計為:
該飛行航跡包含垂直起降、過渡轉換和巡航3個階段。在飛行過程中,根據傾轉角度進行查表,得到合適的控制增益。
對飛行日志進行分析,通過Matlab生成飛行軌跡三維圖(如圖11所示)以及各慣性系下坐標軸方向位移(如圖12所示)。
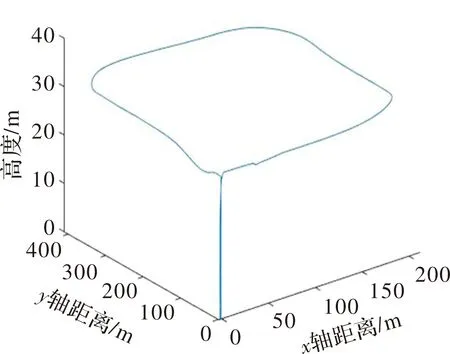
圖11 三維航跡圖
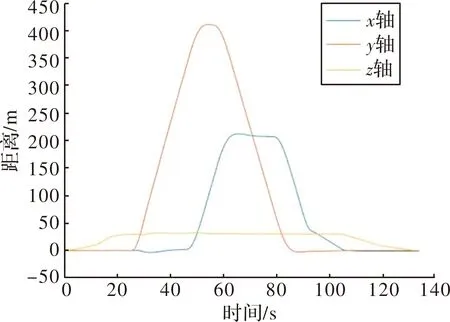
圖12 沿軸向位移
通過圖11和圖12可以看到,驗證機能夠從原點垂直起飛至30 m,并且在此后的轉換過程中基本達到高度穩定的要求。此過程中,驗證機的滾轉和俯仰姿態角以及對應的控制舵面輸出如圖13、圖14所示;由空速計采集的空速信息如圖15所示。由圖15可以看到,驗證機在30 s達到設定的巡航速度,氣動力生效。由圖13可以看到在43 s、58 s和80 s左右驗證機進行BTT轉彎,滾轉角度約為23°,在90 s~100 s中,減速并從巡航模式轉換為垂直降落模式。由圖15可以看出巡航速度進行自適應修正,逐漸趨近于16 m/s。
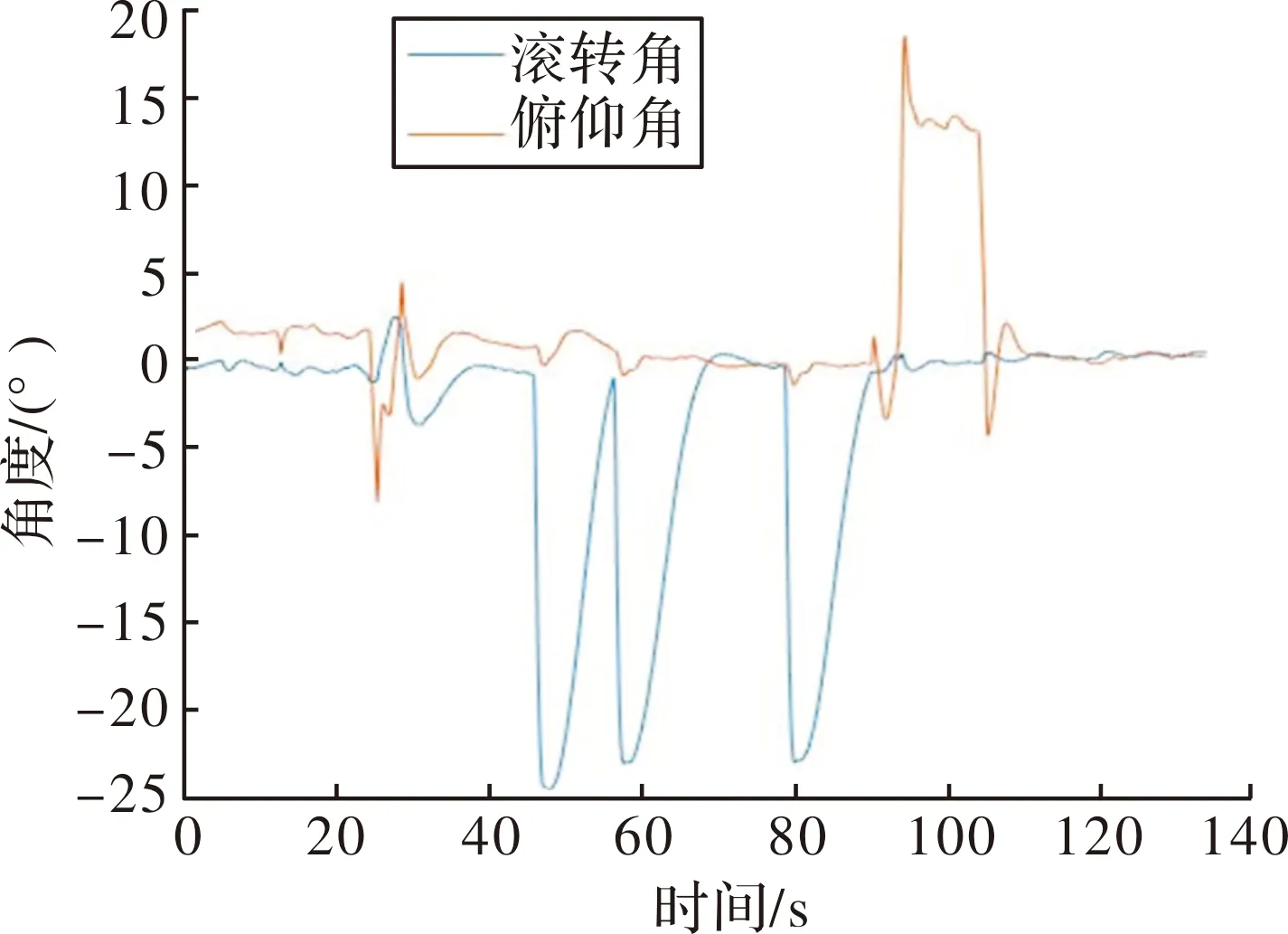
圖13 姿態角曲線
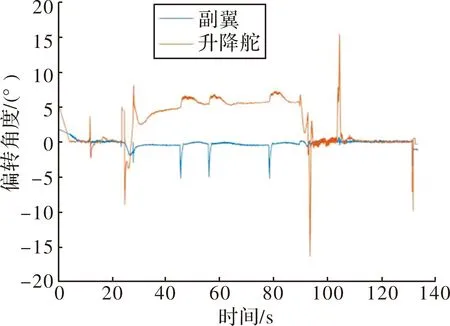
圖14 舵面偏轉角
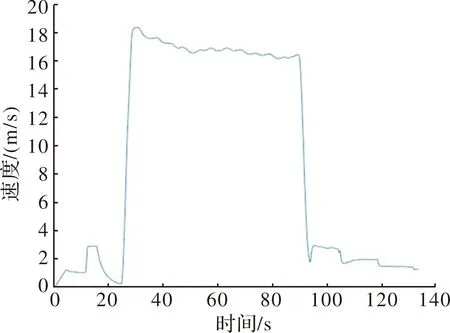
圖15 飛行速度
4 結論
文中所設計的傾轉旋翼機全局控制器能夠滿足垂直起降、過渡過程和固定翼巡航3個模式下的控制要求。在轉換過程中通過增益調度的方法實現控制面的逐漸切換,該方法采用離線計算,在線查表的方式,具有計算量小,易于工程實現的優勢。利用四元數表征姿態的方法有效避免了歐拉角奇異的問題,試飛驗證表明能夠滿足高度穩定和姿態穩定的控制要求。
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04
