多無(wú)動(dòng)力導(dǎo)彈協(xié)同作戰(zhàn)三維制導(dǎo)律研究
2021-03-21 07:26:36張銘陽(yáng)馬澤遠(yuǎn)夏群利李墨吟
彈箭與制導(dǎo)學(xué)報(bào) 2021年6期
關(guān)鍵詞:設(shè)計(jì)
張銘陽(yáng),馬澤遠(yuǎn),夏群利,李墨吟,李 威
(1 北京理工大學(xué)宇航學(xué)院,北京 100081;2 上海機(jī)電工程研究所,上海 201109)
0 引言
隨著反導(dǎo)防御技術(shù)的不斷發(fā)展與反導(dǎo)防御體系日趨完善,傳統(tǒng)的單枚導(dǎo)彈作戰(zhàn)模式愈發(fā)難以滿足環(huán)境多變、目標(biāo)繁雜與攻防對(duì)抗激烈的未來(lái)戰(zhàn)爭(zhēng)需求。多導(dǎo)彈協(xié)同打擊模式以其具備通過(guò)信息共享實(shí)現(xiàn)彈間協(xié)調(diào)合作,最終提升整體作戰(zhàn)能力,增強(qiáng)目標(biāo)毀傷效能等特點(diǎn),受到了廣泛的關(guān)注。
多彈時(shí)間協(xié)同制導(dǎo)方法一般按照導(dǎo)彈之間有無(wú)通信分成攻擊時(shí)間控制方法與協(xié)同導(dǎo)引方法兩類[1-2],其中,攻擊時(shí)間控制方法要求所有導(dǎo)彈在發(fā)射前被指定相同的攻擊時(shí)間,每枚導(dǎo)彈獨(dú)立完成打擊任務(wù)[3-5];協(xié)同導(dǎo)引方法利用彈間通信拓?fù)渚W(wǎng)絡(luò),實(shí)現(xiàn)信息交互,并設(shè)計(jì)協(xié)同制導(dǎo)算法調(diào)整彈的運(yùn)動(dòng),進(jìn)而實(shí)現(xiàn)對(duì)目標(biāo)的高效毀傷[6-8]。盡管攻擊時(shí)間控制方法能夠較好解決多枚導(dǎo)彈同時(shí)打擊的問(wèn)題,但是需要提前設(shè)置導(dǎo)彈剩余飛行時(shí)間,忽略了彈間信息交互能力,導(dǎo)致制導(dǎo)律魯棒性較差。因此,采用協(xié)同導(dǎo)引方法,利用彈間信息通訊,將導(dǎo)彈實(shí)現(xiàn)任務(wù)的剩余時(shí)間作為協(xié)調(diào)變量,實(shí)現(xiàn)多彈的協(xié)同打擊具有重要意義。張友安等[9]基于領(lǐng)彈-從彈的制導(dǎo)策略,利用動(dòng)態(tài)逆理論,設(shè)計(jì)從彈機(jī)動(dòng)指令,實(shí)現(xiàn)了多彈協(xié)同打擊。趙斌等[10]基于領(lǐng)從彈協(xié)同框架,利用滑模控制理論提出了一種分布式協(xié)同制導(dǎo)律,實(shí)現(xiàn)了在領(lǐng)從彈視線角一致前提下對(duì)目標(biāo)的協(xié)同打擊。Song等[11]基于極大值理論,以時(shí)間最短為性能指標(biāo),設(shè)計(jì)了考慮攻擊時(shí)間約束與終端角度約束的協(xié)同制導(dǎo)律。鄒麗等[12]提出了具有異構(gòu)領(lǐng)從彈的分布式自適應(yīng)協(xié)同方法,并基于分布式同步網(wǎng)絡(luò)理論設(shè)計(jì)了領(lǐng)從彈協(xié)同制導(dǎo)律,完成了多彈的齊射攻擊。趙恩嬌等[13]設(shè)計(jì)了一種參數(shù)自適應(yīng)多彈協(xié)同制導(dǎo)律,利用一致性理論與非線性狀態(tài)跟蹤控制器提升了協(xié)同制導(dǎo)方法的魯棒性與收斂速度。Shaferman等[14]利用最優(yōu)控制理論,針對(duì)二維動(dòng)目標(biāo),以相對(duì)視線角偏差與脫靶量為性能指標(biāo),設(shè)計(jì)了協(xié)同制導(dǎo)律,實(shí)現(xiàn)了時(shí)間的協(xié)同。Lee等[15]結(jié)合了視線角協(xié)同項(xiàng)與平面比例導(dǎo)引律,設(shè)計(jì)了一種考慮視線角約束的協(xié)同制導(dǎo)律。王曉芳等[16]提出了一種由視線角速度收斂制導(dǎo)律與彈目距離協(xié)同制導(dǎo)律兩部分組成的多彈協(xié)同制導(dǎo)律,有效實(shí)現(xiàn)了彈目距離與攻擊時(shí)間的協(xié)同。然而,以上文獻(xiàn)大多假設(shè)打擊目標(biāo)為靜目標(biāo),且各導(dǎo)彈的飛行速度恒定,或是在二維平面內(nèi)進(jìn)行研究,不符合實(shí)際作戰(zhàn)情況。目前,針對(duì)三維空間末制導(dǎo)段無(wú)動(dòng)力導(dǎo)彈速度時(shí)變狀態(tài)下協(xié)同攻擊動(dòng)目標(biāo)問(wèn)題的研究較少。
文中研究多枚導(dǎo)彈末制導(dǎo)段無(wú)動(dòng)力情況下,對(duì)空中高價(jià)值時(shí)敏目標(biāo)的協(xié)同打擊問(wèn)題。采用縱向通道與側(cè)向通道耦合的三維彈目相對(duì)運(yùn)動(dòng)模型,將領(lǐng)從彈間的剩余時(shí)間誤差作為協(xié)調(diào)變量,并利用三維純比例導(dǎo)引,使導(dǎo)彈彈道最終收斂至偏航平面,進(jìn)而基于時(shí)標(biāo)分離原則與動(dòng)態(tài)逆系統(tǒng)理論設(shè)計(jì)多無(wú)動(dòng)力導(dǎo)彈時(shí)間協(xié)同制導(dǎo)律,仿真結(jié)果驗(yàn)證了其正確性與有效性。
1 多彈三維空間協(xié)同模型
為簡(jiǎn)化問(wèn)題,進(jìn)行以下假設(shè):1)將導(dǎo)彈與目標(biāo)視為質(zhì)點(diǎn);2)導(dǎo)彈受到的阻力與速度方向相反且升力與速度方向垂直。
作戰(zhàn)場(chǎng)景設(shè)定為多枚導(dǎo)彈從距目標(biāo)60 km左右處,主動(dòng)雷達(dá)導(dǎo)引頭開(kāi)啟,進(jìn)入末制導(dǎo)階段,領(lǐng)從彈間進(jìn)行協(xié)同信息交互,對(duì)一高價(jià)值時(shí)敏目標(biāo)實(shí)施飽和打擊。基于上述假設(shè)與作戰(zhàn)場(chǎng)景,建立導(dǎo)彈與目標(biāo)的三維相對(duì)運(yùn)動(dòng)關(guān)系示意圖如圖1所示。
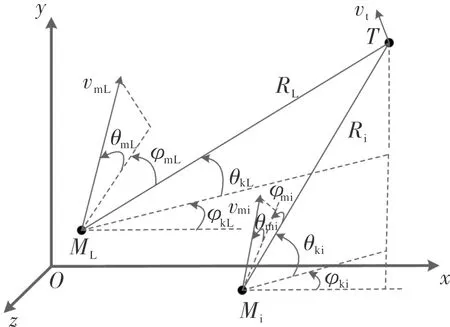
圖1 彈目三維相對(duì)運(yùn)動(dòng)關(guān)系示意圖
圖1中,Oxyz表示慣性坐標(biāo)系,RL,Ri分別為領(lǐng)彈、從彈與運(yùn)動(dòng)目標(biāo)之間的彈目距離;vmL,vmi分別為領(lǐng)彈、從彈速度;QmL,θmi分別為領(lǐng)彈、從彈速度方向相對(duì)于視線方向的俯仰前置角;φmL,φmi分別為領(lǐng)彈、從彈相對(duì)于視線方向的偏航前置角;θkL,θki分別為領(lǐng)彈、從彈的視線高低角;φkL,φki分別為領(lǐng)彈、從彈的視線方位角;vt為運(yùn)動(dòng)目標(biāo)的速度。
根據(jù)圖1所示的領(lǐng)從彈與目標(biāo)的相對(duì)運(yùn)動(dòng)關(guān)系,建立式(1)所示三維空間內(nèi)導(dǎo)彈對(duì)目標(biāo)的相對(duì)運(yùn)動(dòng)方程組。
(1)

2 多無(wú)動(dòng)力導(dǎo)彈三維協(xié)同制導(dǎo)律設(shè)計(jì)
針對(duì)多無(wú)動(dòng)力導(dǎo)彈協(xié)同動(dòng)目標(biāo)打擊問(wèn)題,在領(lǐng)彈-從彈制導(dǎo)框架下,分別設(shè)計(jì)領(lǐng)彈與從彈俯仰通道與偏航通道的制導(dǎo)律。由于領(lǐng)彈雷達(dá)導(dǎo)引頭開(kāi)啟,能夠?qū)崿F(xiàn)目標(biāo)定位,且飛行狀態(tài)不受從彈影響,因此,領(lǐng)彈在俯仰通道與偏航通道均采用比例導(dǎo)引。此外,在末制導(dǎo)后期,當(dāng)導(dǎo)彈速度前置傾角趨于零時(shí),彈道將完全落于偏航面,如果保證領(lǐng)彈與從彈在偏航面內(nèi)彈道曲率(相對(duì)于速度而言)一致,那么領(lǐng)彈與從彈將同時(shí)到達(dá)目標(biāo)[17],實(shí)現(xiàn)對(duì)目標(biāo)的協(xié)同打擊。因此,從彈在俯仰通道采用比例導(dǎo)引,適當(dāng)設(shè)置參數(shù),使其速度前置傾角最終趨于零,并利用動(dòng)態(tài)逆理論與時(shí)標(biāo)分離原則,利用領(lǐng)從彈間的剩余時(shí)間差,設(shè)計(jì)從彈的偏航通道制導(dǎo)律,最終實(shí)現(xiàn)多彈對(duì)目標(biāo)的精確協(xié)同毀傷。
2.1 領(lǐng)彈制導(dǎo)律設(shè)計(jì)
在領(lǐng)彈-從彈協(xié)同制導(dǎo)模式中,從彈需要接收領(lǐng)彈的信息,因此,領(lǐng)彈對(duì)目標(biāo)的跟蹤打擊能力尤為重要。為提升領(lǐng)彈跟蹤打擊目標(biāo)的能力,領(lǐng)彈采用三維純比例導(dǎo)引。
(2)
(3)
為了使領(lǐng)彈在俯仰通道前置角θmi最終收斂至零,偏航通道控制指令azL的比例系數(shù)應(yīng)取不同值,且kL3取較大值[18]。
2.2 從彈制導(dǎo)律設(shè)計(jì)
為了讓從彈的速度前置傾角最終趨于零,使彈道落在偏航面,從彈在俯仰通道上利用如式(4)所示的三維純比例導(dǎo)引,且ki1取較大值。
(4)
針對(duì)從彈偏航通道的制導(dǎo)律設(shè)計(jì)問(wèn)題,利用動(dòng)態(tài)逆控制理論使領(lǐng)從彈的彈道曲線曲率趨于一致,實(shí)現(xiàn)領(lǐng)從彈對(duì)高價(jià)值時(shí)敏目標(biāo)的協(xié)同打擊,具體流程如圖2所示。
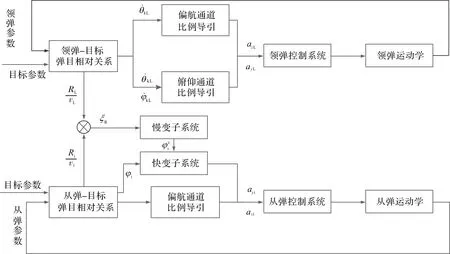
圖2 多無(wú)動(dòng)力導(dǎo)彈協(xié)同三維制導(dǎo)律設(shè)計(jì)流程
根據(jù)三維空間內(nèi)彈目的幾何關(guān)系,針對(duì)多無(wú)動(dòng)力導(dǎo)彈協(xié)同動(dòng)目標(biāo)打擊的問(wèn)題,首先定義領(lǐng)從彈剩余時(shí)間誤差:
(5)
對(duì)其求導(dǎo)得:
(6)
式中,θmtL,θmti,φmtL與φmti分別為目標(biāo)在領(lǐng)彈與從彈視線方向上的速度前置傾角與速度前置方位角。

2.2.1 慢變子系統(tǒng)設(shè)計(jì)
為使系統(tǒng)的輸出εR→0,首先定義期望的慢變子系統(tǒng)動(dòng)力學(xué)為:
(7)
式中,kR為慢變子系統(tǒng)的帶寬。

(8)

(9)

(10)
可令:
(11)

(12)
2.2.2 快變子系統(tǒng)設(shè)計(jì)

(13)
式中,kφ為期望的快變子系統(tǒng)的帶寬。
(14)
3 仿真分析
假設(shè)1枚領(lǐng)彈帶領(lǐng)3枚從彈從距離目標(biāo)60 km左右的位置,協(xié)同打擊以預(yù)警機(jī)為例的高價(jià)值時(shí)敏目標(biāo)的情況,領(lǐng)從彈與目標(biāo)的初始參數(shù)設(shè)置如表1所示。表中下標(biāo)0表示初始值,(xm0,ym0,zm0)表示導(dǎo)彈在慣性系的坐標(biāo)。假設(shè)預(yù)警機(jī)在慣性空間內(nèi)以az=3gsin(0.1πt)的過(guò)載進(jìn)行機(jī)動(dòng),領(lǐng)從彈的俯仰通道與偏航通道的可用過(guò)載為±10g,三維純比例導(dǎo)引部分的比例系數(shù)取為kL1=kL2=ki1=10,kL3=ki2=5,子系統(tǒng)設(shè)計(jì)參數(shù)取為c1=0.7,c2=0.9,kφ=5。利用提出的制導(dǎo)律進(jìn)行仿真,仿真結(jié)果如圖3~圖12所示。
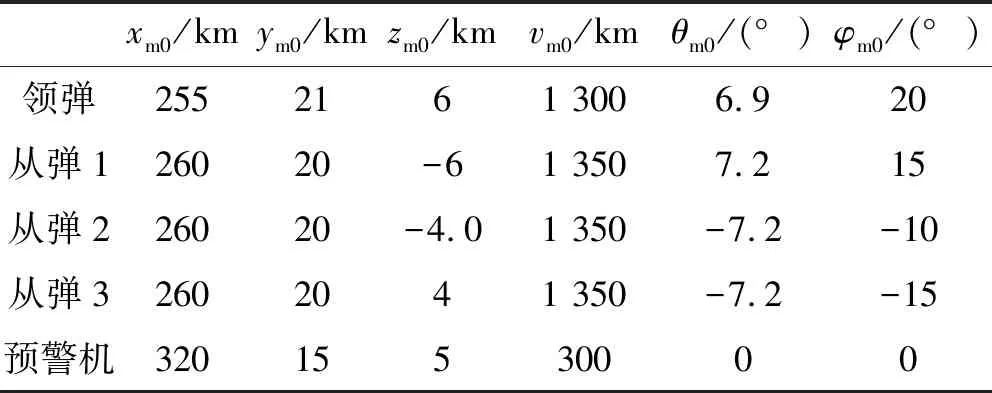
表1 初始參數(shù)設(shè)置
從圖3~圖7可以看出,基于提出的協(xié)同制導(dǎo)律能夠使領(lǐng)從彈的剩余時(shí)間誤差趨于零,實(shí)現(xiàn)對(duì)動(dòng)目標(biāo)的協(xié)同飽和打擊。由圖8~圖9可知,末制導(dǎo)初期,領(lǐng)彈與從彈從不同初始位置出發(fā),距離目標(biāo)較遠(yuǎn),為了滿足時(shí)間一致,從彈以較大過(guò)載進(jìn)行機(jī)動(dòng),使剩余時(shí)間誤差快速趨于零,且在制導(dǎo)末期,由于協(xié)調(diào)變量已經(jīng)近似為零,領(lǐng)從彈的縱向過(guò)載與側(cè)向過(guò)載也均收斂至零。從圖10~圖11所示的導(dǎo)彈速度前置角曲線中可看出,通過(guò)比例導(dǎo)引與機(jī)動(dòng)控制相結(jié)合的方式,從彈俯仰通道速度前置偏角最終收斂至零附近,進(jìn)而使領(lǐng)從彈位于偏航平面內(nèi),最后利用偏航通道的動(dòng)態(tài)逆控制實(shí)現(xiàn)時(shí)間協(xié)同。此外,由于目標(biāo)具有一定的機(jī)動(dòng)性且從彈需要實(shí)現(xiàn)跟蹤領(lǐng)彈彈目距離的需要,從彈速度前置角的變化不再會(huì)趨于領(lǐng)彈的前置角。從圖12可以看出,由于氣動(dòng)力等作用,領(lǐng)從彈的飛行速度會(huì)隨著時(shí)間而發(fā)生變化,但速度始終大于目標(biāo)速度以保證能夠追蹤目標(biāo)并完成對(duì)目標(biāo)的協(xié)同打擊。
圖3 彈目運(yùn)動(dòng)軌跡
圖4 導(dǎo)彈縱向彈道曲線
圖5 導(dǎo)彈側(cè)向彈道曲線
圖6 領(lǐng)從彈間剩余時(shí)間誤差
圖7 剩余彈目距離
圖8 導(dǎo)彈側(cè)向過(guò)載
圖9 導(dǎo)彈縱向過(guò)載

圖10 導(dǎo)彈速度前置偏角

圖11 導(dǎo)彈速度前置傾角
圖12 導(dǎo)彈飛行速度
4 結(jié)論
研究了末制導(dǎo)段三維空間內(nèi)速度時(shí)變的多無(wú)動(dòng)力導(dǎo)彈協(xié)同打擊高價(jià)值時(shí)敏目標(biāo)的問(wèn)題,提出了領(lǐng)彈-從彈框架下基于三維純比例導(dǎo)引與動(dòng)態(tài)逆控制的多彈協(xié)同制導(dǎo)方法,得出的主要結(jié)論如下:
1)采用橫向與縱向耦合的三維相對(duì)運(yùn)動(dòng)模型,以剩余時(shí)間誤差為協(xié)調(diào)變量,考慮無(wú)動(dòng)力導(dǎo)彈末制導(dǎo)速度變化,設(shè)計(jì)了多無(wú)動(dòng)力導(dǎo)彈三維協(xié)同制導(dǎo)律,使得領(lǐng)從彈在0.03 s的最大時(shí)間誤差內(nèi)同時(shí)命中目標(biāo),達(dá)到飽和打擊的目的。
2)選取初始剩余打擊時(shí)間最長(zhǎng)的彈為領(lǐng)彈,引導(dǎo)其余從彈飛行,領(lǐng)從彈在縱向平面內(nèi)均采用三維純比例導(dǎo)引,設(shè)置合理參數(shù)使領(lǐng)從彈的速度前置傾角最終收斂至零附近,進(jìn)而使其落在偏航平面,并結(jié)合時(shí)標(biāo)分離原則與動(dòng)態(tài)逆控制理論設(shè)計(jì)了偏航通道制導(dǎo)律。
3)針對(duì)動(dòng)目標(biāo)的機(jī)動(dòng)特性,推導(dǎo)了考慮目標(biāo)機(jī)動(dòng)的多無(wú)動(dòng)力導(dǎo)彈時(shí)間協(xié)同三維制導(dǎo)律,在滿足一定的過(guò)載約束下,以領(lǐng)從彈剩余打擊時(shí)間一致為期望作為控制器慢系統(tǒng)的設(shè)計(jì)輸入,并將其輸出的期望速度前置偏角作為快系統(tǒng)的輸入,求解過(guò)載指令,仿真結(jié)果驗(yàn)證了此制導(dǎo)律的有效性。
猜你喜歡
河北畫(huà)報(bào)(2020年8期)2020-10-27 02:54:06
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04
