一種適用于多端柔性直流輸配電系統的新型電壓下垂控制方法
2021-03-19 05:45:30王秀茹王一振董平平趙航宇
電力系統及其自動化學報 2021年2期
王秀茹,劉 剛,王一振,張 科,董平平,趙航宇
(1.江蘇國網江蘇省電力有限公司宿遷供電分公司,宿遷 223800;2.天津大學電氣自動化與信息工程學院,天津 300072)
隨著新能源、新材料、信息技術和電力電子技術的長足發展和廣泛應用,用戶對用電需求、電能質量及供電可靠性等的要求不斷提高,現有交流系統面臨分布式電源靈活友好接入、負荷和用電需求多樣化、潮流均衡協調控制復雜化以及電能供應穩定性、高效性、經濟性等方面的巨大挑戰[1?3]。
首先,在高壓輸電領域,基于電壓源型換流器VSC(voltage source converter)的柔性直流輸電系統占地面積小,可以為無源系統供電,沒有無功補償及換相失敗等問題,為海上風電并網提供了一種可行方案[4?5]。相比于點對點的柔性直流輸電系統,多端柔性直流 VSC?MTDC(VSC based multi?terminal DC)系統具有投資少、靈活可控等優勢。其次,在中低壓配電領域,由于分布式電源具有強隨機性和間歇性的特點,直接接入交流配電網會對電能質量產生很大的影響,而且常見的分布式電源主要有光伏電池、燃料電池、風力發電和燃氣輪機等,這些電源產生的電能均為直流電或可通過簡單整流后變為直流電,所以將分布式電源接入直流母線不僅能夠節省大量換流環節及損耗,而且直流母線可以作為緩沖環節降低分布式電源功率波動帶來的負面影響,滿足分布式電源靈活、高滲透率接入的需求[6?7]。所以,多端柔性直流技術在輸配電領域均具備良好的應用前景。然而,在直流系統中,直流電壓反映了功率平衡的情況,當整流側功率大于逆變側功率時直流電壓上升,反之,直流電壓下降[8]。因此,直流電壓控制能力是評價多端柔性直流輸配電系統性能的關鍵指標之一。
目前,多端柔性直流輸配電系統電壓協調控制方法主要可以分為3類:主從控制、直流電壓偏差控制和直流電壓下垂控制。其中,主從控制指在柔性直流系統中,所有與交流系統連接的有源換流器中,有且只有一個換流器作為主換流器,工作于直流電壓控制模式,而其他換流器均為從換流器,可以工作在功率控制模式或者交流電壓控制模式。主從控制優勢是結構簡單,能夠實現各個換流站功率的精確控制,電壓調節性能和功率分配特性具備良好的剛性。但是,主從控制的不足是各個換流站之間必須具備良好的通訊,一旦出現通訊故障、控制直流電壓的主站發生功率越限或者故障退出運行等情況,整個直流系統將失去電壓控制環節而失穩,系統可靠性較低[9?11]。
直流電壓偏差控制是在主從控制的基礎上發展起來的。一旦控制電壓的主站失去控制電壓的能力,當直流電壓超出預設的電壓偏差閾值時,按照備用主站優先級的順序,具備優先控制電壓的備用主站控制直流電壓。直流電壓偏差控制具備主從控制的優勢,避免了主站失去電壓控制能力后系統電壓失去穩定情況的發生。但是,多個后備主站之間需要引入直流電壓優先級,直流電壓偏差過大,可能會引起系統內直流電壓越限,直流電壓偏差越過小易引起系統振蕩[12?14]。
直流電壓下垂控制指換流器直流電壓隨輸出功率的變化而變化,為了保證并聯直流系統穩定運行,一般采用電壓?功率(V?P)下垂輸出特性。電壓下垂控制屬于多點直流電壓控制,由幾個換流站共同承擔系統的不平衡功率,動態響應速度快,運行可靠性高,不需要通訊,系統擴展方便,適應多端柔性直流輸配電系統的發展要求[15?16]。但直流電壓下垂控制不能精確控制換流站輸出的有功功率,且下垂系數對整個系統的電壓調節特性和功率分配特性影響較大。尤其是一旦發生擾動,下垂控制下的多端柔性直流輸配電系統容易出現電壓越限。針對下垂控制的缺點,國內外很多專家學者提出改進下垂控制策略。文獻[17]結合電壓偏差控制和電壓下垂控制的優勢,修正了換流站的直流電壓與有功功率的特性曲線,提出了一種基于直流電壓偏差的改進下垂控制策略;文獻[18?20]提出基于功率影響因子的自適應下垂控制策略,旨在提高直流系統的功率分配特性;文獻[21]在電壓影響因子和功率影響因子的基礎上,研究提出通過改變下垂斜率實現直流電壓和功率的良好分布。現有的電壓下垂控制策略主要針對下垂控制的下垂系數進行整定和改進,忽略了運行工作點的作用。
針對上述控制策略的不足,本文在多端柔性直流系統控制架構的基礎上,提出通過改變下垂控制參考工作點的方法實現多端柔性直流輸配電系統在各類擾動下的穩定運行。最后,在PSCAD/EMT?DC中搭建四端柔性直流系統驗證所提控制方法的正確性和有效性。
1 多端柔性直流控制系統架構
1.1 柔性直流換流站典型控制架構
柔性直流換流站控制系統如圖1所示,VSC控制器一般包括外環電壓控制和內環電流控制。內環控制旨在通過調節VSC并網點PCC(point of common coupling)的交流電壓快速跟蹤電流指令,即由電流指令生成調制波的過程;外環控制基于VSC換流站運行狀態和控制指令(有功功率、無功功率、直流電壓等),生產內環電流控制器的dq軸電流參考值。一般地,外環控制包含2類控制參數:一類是有功類控制,主要控制直流電壓,與交流系統交換的有功功率,交流系統頻率等指令生成d軸電流參考值;另一類是無功類控制,主要控制饋入交流系統的無功功率,并網點交流電壓幅值等指令生成q軸電流參考值。在本文中,主要考慮多端柔性直流輸配電系統有功類控制。
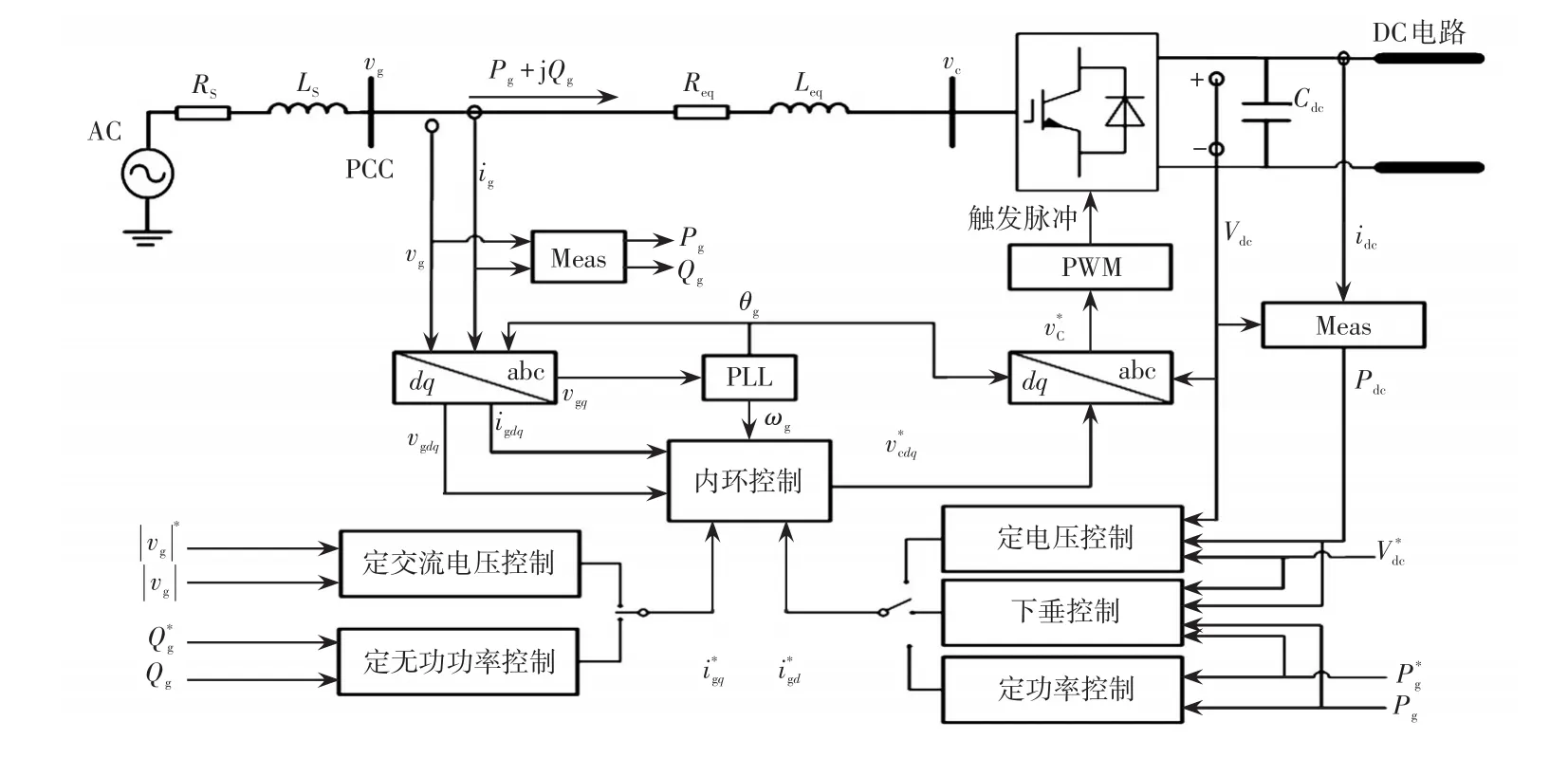
圖1 柔性直流換流站控制系統Fig.1 Control system of a VSC station
1.2 柔性直流換流站有功類控制
如圖1所示,柔性直流換流站有功類控制主要包括3種控制模式:定電壓控制模式、定有功功率控制模式以及電壓下垂控制模式。3類控制模式下直流電壓和有功功率的關系及邏輯框圖如圖2所示。定直流電壓控制模式如圖2(a)所示,無論交換有功功率的多少,VSC控制直流電壓恒定;定有功功率控制模式如圖2(b)所示,不管直流電壓如何變化,VSC控制與交流系統交換的有功功率恒定;電壓下垂控制模式如圖2(c)所示,直流電壓和有功功率滿足方程
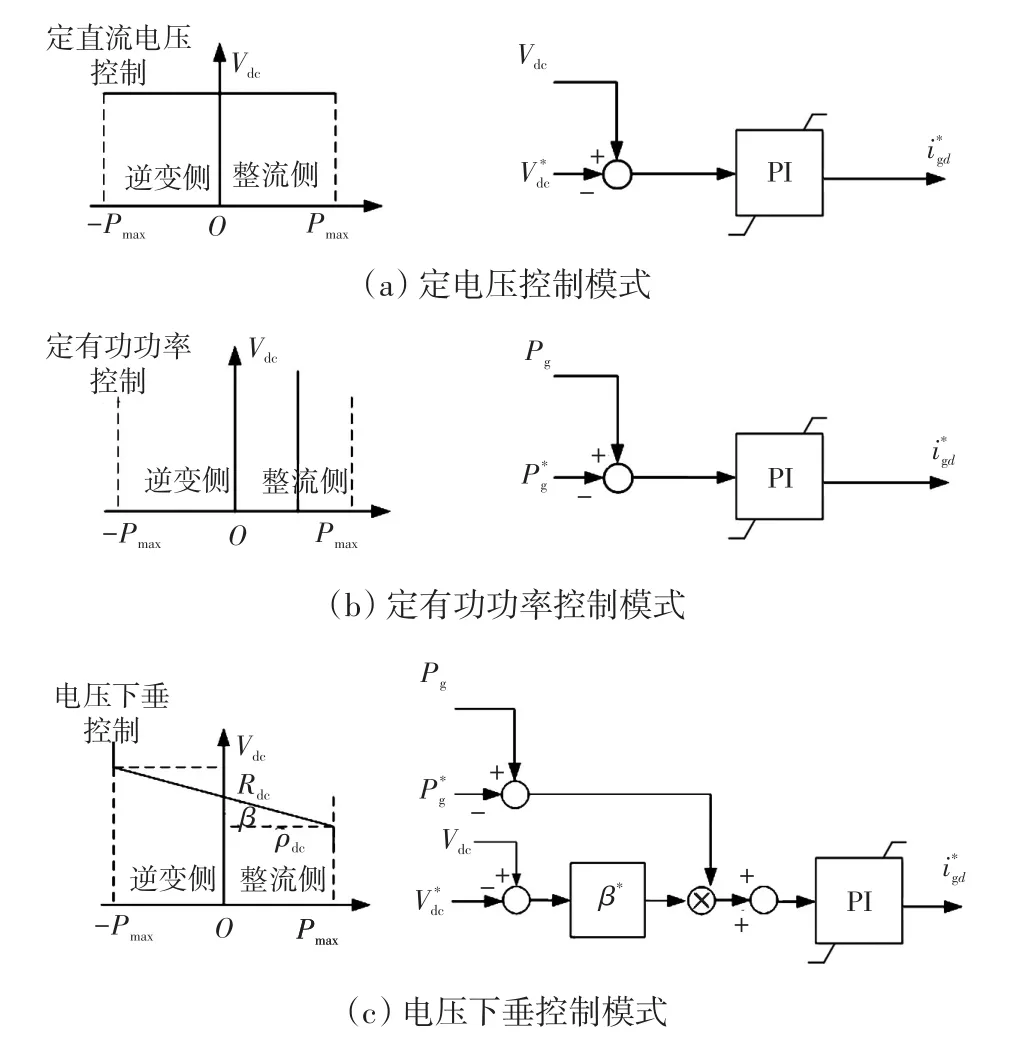
圖2 柔性直流換流站3種控制模式及其框圖Fig.2 Three control modes of a VSC station and the corresponding block diagrams

2 一種新型的下垂控制方法
2.1 傳統電壓下垂控制方法
對于一個點對點的柔性直流系統,假設VSC1和VSC2均采用電壓下垂控制策略,則VSC1和VSC2根據所定義的下垂控制曲線進行功率分配。
為簡化問題,假設忽略網損,即不考慮網絡參數,且VSC1和VSC2的直流電壓相同。點對點柔性直流系統電壓下垂控制特性如圖3所示,在穩態時,VSC1和VSC2分別運行在工作點OP1和OP2。
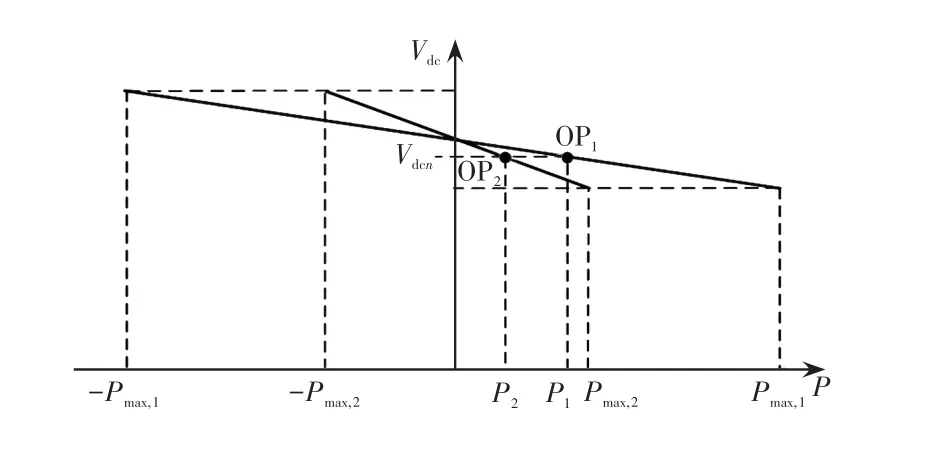
圖3 點對點柔性直流系統電壓下垂控制特性Fig.3 Voltage droop control characteristics of a twoterminal VSC based DC system
一旦發生了擾動,導致點對點的柔性直流系統產生了不平衡功率ΔP,則VSC1和VSC2同時承擔一部分不平衡功率,即
式中:ΔP為總的不平衡功率;ΔP1和ΔP2分別為VSC1和VSC2承擔的不平衡功率;β1和β2分別為VSC1和VSC2的下垂系數。
從式(3)和式(4)可以看到,當下垂系數β變大時,VSC分配的不平衡功率變大。所以,在一個無損的多端柔性直流系統中,為了實現功率的合理分配,每個換流站的下垂系數應與各自的最大傳輸能力(容量)成正比。
然而,一旦考慮線路參數,各個換流站由于線路壓降的原因而變得不同。在一些擾動下,比如故障后換流站退出運行,在分擔不平衡功率的同時,一些換流站的直流電壓偏差會超過限制,這就需要對傳統下垂控制進行改進。
2.2 適合多端柔性直流輸配電系統的新型下垂控制策略
直流電壓偏差是評價多端柔性直流輸配電系統性能的一個重要指標,所以本文提出利用直流電壓偏差改變下垂系數工作點參考值的新型下垂控制策略,實現多端柔性直流系統在各類擾動下電壓不越限。VSCi的直流電壓偏差ΔVdci可以表示為

式中:Vdci和Vdcn分別代表VSCi的直流電壓和額定直流電壓;HVi為電壓影響因子,表示電壓裕度;ξ為直流電壓限制系數,通常情況下,ξ=5%~10%。
為了實現電壓不越限的目的,VSCi在檢測到本站直流電壓Vdci接近電壓限制(上限)時,本文提出一種自適應調節運行工作點參考電壓的方法,具體實現方式為

式(7)說明,當直流電壓Vdci接近電壓限制(上限)時,電壓影響因子HVi持續減小,則參考直流電壓自適應減小以防止直流電壓越限。當直流電壓等于額定電壓時,即Vdci=Vdcn,通過調節λi可以得到。
將式(7)代入式(1),則所提出的電壓下垂控制策略可以表示為

對比式(7)和式(8),VSC下垂曲線運行點的參考電壓會因為VSC工作狀態的變化而自適應地變化。新型的下垂控制策略框圖如圖4所示。
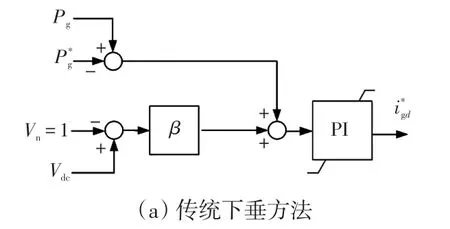
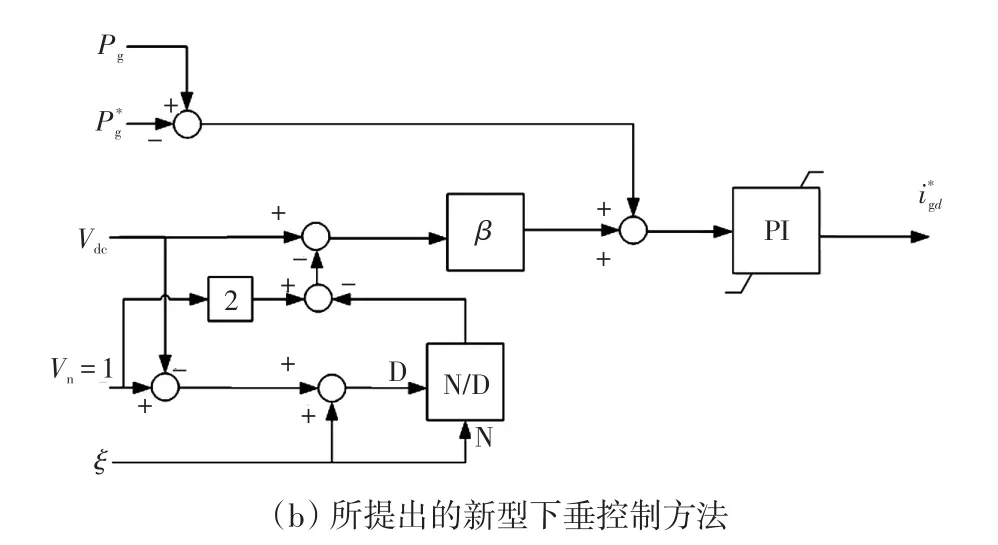
圖4 下垂控制框圖Fig.4 Block diagram of voltage droop control
3 仿真驗證
為了驗證所提新型下垂控制策略的正確性和有效性,在PSCAD/EMTDC軟件中建立一個±320 kV四端柔性直流輸電系統模型,如圖5所示。四端柔性直流輸電系統將位于VSC1換流站的風能傳輸給VSC2、VSC3和VSC4消納。VSC1工作在Vf控制模式,VSC2、VSC3和VSC4工作在電壓下垂控制模式,具體參數如表1所示。
圖5 四端柔性直流輸電系統示意Fig.5 Diagram of four-terminal VSC-based DC system
表1 四端柔性直流輸電系統參數Tab.1 Parameters of four-terminal VSC-based DC system
在本例中,VSC2、VSC3和VSC4分別采用傳統定下垂控制方法和所提出的新型下垂控制方法進行仿真對比。傳統下垂控制邏輯框圖如圖4(a)所示,下垂系數如表1所示。新型下垂控制邏輯框圖如圖4(b)所示,權重系數λi=0.05。在穩態情況下,VSC1輸出有功功率1 500 MW,VSC2、VSC3和VSC4分別接收有功功率257、598和452 MW。
擾動情況設置如下。
(1)t=6 s時,VSC1和 VSC3之間的直流線路T13無故障斷開(見圖5的F1故障)。
(2)t=9 s時,VSC3換流站無故障退出運行(見圖5的F2故障)。
整個柔性直流輸電系統的動態過程和仿真結果如圖6~圖8所示,其中Vdc2、Vdc3和Vdc4分別代表VSC2、VSC3、VSC4的直流電壓,P1、P2、P3、P4分別代表VSC1、VSC2、VSC3、VSC4的從交流側饋入到直流側的有功功率。
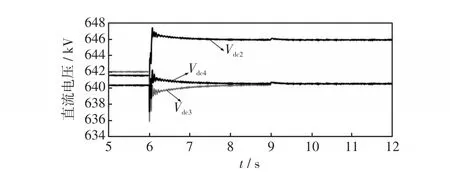
圖6 新型下垂控制方法下各有源換流站直流電壓仿真結果Fig.6 Simulation results of DC voltage of grid-connected VSC stations when using the novel voltage droop control method
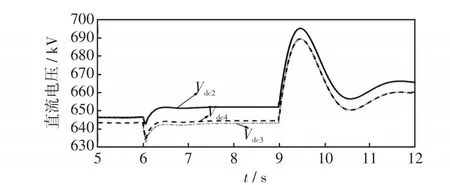
圖7 傳統下垂控制方法下各個有源換流站直流電壓仿真結果Fig.7 Simulation results of DC voltage of grid-connected VSC stations when using the traditional voltage droop control method
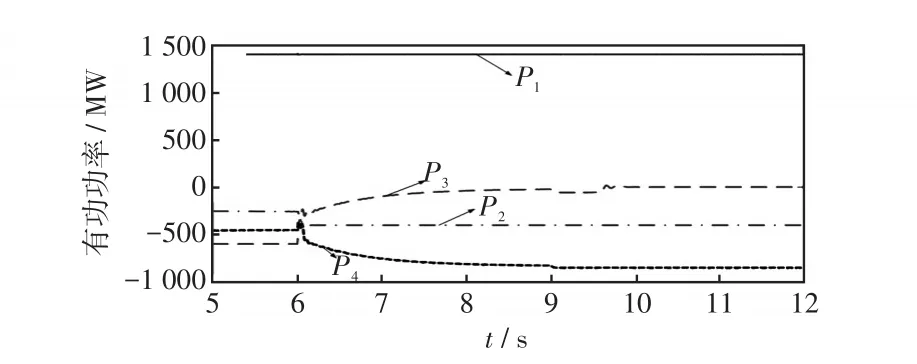
圖8 在各種擾動下各個換流站輸出有功功率仿真結果Fig.8 Simulation results of active power output from grid-connected VSC stations under different disturbances
在t=6 s時,直流線路T13無故障斷開,各個VSC換流站的直流電壓和有功功率經過波動后達到一個穩定的運行狀態。
在t=9 s時,VSC3換流站無故障退出運行,VSC3換流站的有功功率快速降低到0,VSC3所承擔的功率被VSC2和VSC4承擔。
如圖7所示,在傳統下垂控制的方式下,由于下垂系數及參考運行工作點不變,在擾動發生以后,直流電壓偏差較大,甚至出現超過直流電壓限定值的現象。如圖6所示,在所提新型下垂控制方法下,直流電壓偏差較小,不會出現直流電壓偏差超過電壓典定制的問題。
在整個擾動過程中,由于采取新型下垂控制的換流站的參考電壓隨著直流電壓偏差而自適應地改變,所以在整個擾動過程中,所有采用采取新型下垂控制的換流站的直流電壓均不超過電壓限定值(672 kV)。以VSC2為例,VSC2下垂控制參考點電壓的仿真結果如圖9所示,當VSC2的電壓變化后,其下垂控制參考點電壓自適應地變化,保障VSC2電壓不超過電壓限定值。四端柔性直流輸電系統在擾動下的仿真結果驗證了所提出新型下垂控制方法的正確性和有效性。
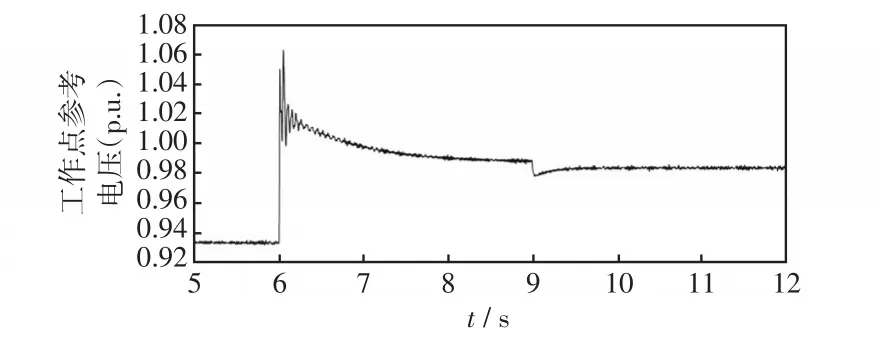
圖9 VSC2下垂控制參考點電壓仿真結果Fig.9 Simulation results of voltage at the reference point under droop control of VSC2
4 結語
在充分考慮直流電壓偏差的基礎上,本文提出一種適用于多端柔性直流輸配電系統的新型下垂控制方法,利用直流電壓偏差實時改變下垂控制參考點電壓,保障在各類故障下直流電壓偏差不超過限定值。該方法在四端±320 kV柔性直流輸電系統中得到了驗證。在未來工作中,需要進一步研究新型下垂控制方法的參數選取問題。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
能源工程(2020年6期)2021-01-26 00:55:22
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
山東冶金(2019年3期)2019-07-10 00:54:04
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
消費導刊(2018年10期)2018-08-20 02:57:02
家庭影院技術(2017年9期)2017-09-26 03:41:45
通信電源技術(2016年1期)2016-04-16 04:57:26