基于穩(wěn)健回歸的激光視覺異常值識別
2021-03-19 06:27:26要志斌馬立峰智晉寧藺素宏
太原理工大學(xué)學(xué)報(bào) 2021年2期
關(guān)鍵詞:測量
要志斌,馬立峰,智晉寧,藺素宏,程 鵬
(1.太原科技大學(xué) a.重型機(jī)械教育部工程研究中心,b.機(jī)械工程學(xué)院,太原 030024;2.太原理工大學(xué) 物理與光電工程學(xué)院,太原 030024)
在冶金工業(yè)和金屬加工行業(yè)中棒材的輪廓尺寸是非常重要的測量內(nèi)容。棒材輪廓的測量一般采用指示量具進(jìn)行機(jī)械測量,或者采用圓度儀和坐標(biāo)測量機(jī)進(jìn)行測量[1-3]。基于機(jī)器視覺的激光測量法逐漸成為輪廓參數(shù)測量的新手段,相對于傳統(tǒng)測量方法,可實(shí)現(xiàn)實(shí)時(shí)在線測量,具有測量精度高,速度快,無損傷的特點(diǎn)[4-6]。對于實(shí)現(xiàn)加工裝備的信息化和智能化具有重要意義。
本文采用基于線結(jié)構(gòu)光的激光視覺系統(tǒng)對棒材輪廓進(jìn)行了測量研究。在測量過程不可避免的存在異常值,當(dāng)數(shù)據(jù)被異常值污染,會(huì)造成模型參數(shù)的錯(cuò)誤估計(jì),得到錯(cuò)誤的分析結(jié)果[7],所以必須采取措施,識別和剔除異常值。受到數(shù)據(jù)分布形態(tài)、數(shù)據(jù)量大小以及自身算法的限制,常用的異常值識別法在激光輪廓測量中存在穩(wěn)健性差、應(yīng)用困難的問題。
本研究提出一種基于穩(wěn)健局部加權(quán)回歸的異常值識別法來實(shí)現(xiàn)輪廓孤立異常值的有效識別。該算法利用穩(wěn)健局部加權(quán)回歸,即綜合局部多項(xiàng)式估計(jì)與局部加權(quán)回歸的穩(wěn)健擬合法開展數(shù)據(jù)平滑,再計(jì)算平滑數(shù)據(jù)與測量數(shù)據(jù)的殘差值,最終依據(jù)3σ準(zhǔn)則判別出輪廓異常值。本研究依據(jù)該算法對棒材激光輪廓數(shù)據(jù)進(jìn)行異常值識別,并開展輪廓橢圓的擬合分析,以驗(yàn)證該方法在激光輪廓檢測中的有效性。
1 基于激光視覺的輪廓測試系統(tǒng)
激光視覺測試系統(tǒng)的工作原理如圖1所示,該系統(tǒng)主要由激光視覺傳感器、運(yùn)動(dòng)控制平臺以及工業(yè)計(jì)算機(jī)組成,可對棒材外廓尺寸進(jìn)行精確測量。激光視覺傳感器采用線結(jié)構(gòu)光掃描方式,即激光光源向空間投射出一平面光,此平面光在被測工件表面形成調(diào)制光帶,再利用相機(jī)鏡頭與像平面的透視幾何關(guān)系,獲取高精度數(shù)字圖像,根據(jù)激光三角測量原理,計(jì)算得到截面輪廓數(shù)據(jù)。利用運(yùn)動(dòng)控制系統(tǒng)沿軸向測量棒材輪廓,則可得到被測工件各截面輪廓云點(diǎn)數(shù)據(jù)[8-10]。
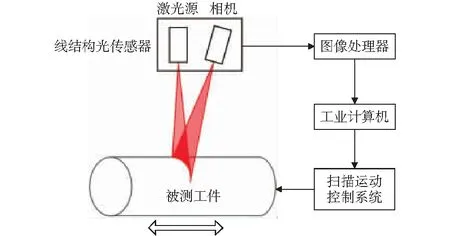
圖1 激光視覺測試系統(tǒng)組成及工作原理
所獲輪廓云點(diǎn)數(shù)據(jù)如圖2所示。由圖可見,輪廓中部存在明顯異常值,該類異常值常以單點(diǎn)或雙點(diǎn)的形式孤立出現(xiàn),與其前后數(shù)據(jù)質(zhì)量無必然聯(lián)系,故該類異常值被稱為孤立型異常值,或孤立野值[11-12]。這些異常值的出現(xiàn)極大影響了測量的精度和準(zhǔn)確度,并導(dǎo)致錯(cuò)誤的測量結(jié)果,所以必須對其加以識別和剔除。
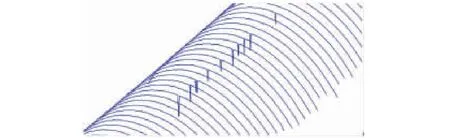
圖2 所測掃描輪廓
2 基于穩(wěn)健局部加權(quán)回歸的異常值識別法
穩(wěn)健局部加權(quán)回歸(robust locally weighted regression,RLWR)屬于非參數(shù)估計(jì)方法。非參數(shù)估計(jì)是現(xiàn)代統(tǒng)計(jì)分析的重要研究方向,其不依賴于樣本所屬總體的分布形式,無需對總體分布參數(shù)進(jìn)行估計(jì),僅從樣本數(shù)據(jù)就可獲取所需的信息,得到樣本序列的分布結(jié)構(gòu),相對于參數(shù)估計(jì),其適用范圍更為廣泛,對減小偏差、提高預(yù)測精度、了解樣本動(dòng)態(tài)結(jié)構(gòu)都具有重要意義[13]。穩(wěn)健局部加權(quán)回歸由局部加權(quán)回歸(locally weighted regression,LWR)發(fā)展而來,是一種綜合局部多項(xiàng)式估計(jì)和局部加權(quán)回歸的穩(wěn)健擬合過程。該方法最早由CLEVELAND提出[14-15],并由CLEVELAND和DEVELIN進(jìn)一步完善[16],因其穩(wěn)健的非參數(shù)回歸特性,逐漸得到重視,應(yīng)用于科學(xué)研究的不同領(lǐng)域[17-18]。
本研究基于穩(wěn)健局部加權(quán)回歸方法,結(jié)合3σ準(zhǔn)則實(shí)現(xiàn)對激光輪廓異常值的有效識別,可稱為基于穩(wěn)健局部加權(quán)回歸的萊特識別法,其基本思路為依次提取一定比例的局部數(shù)據(jù),在該子集中擬合多項(xiàng)式加權(quán)回歸曲線,利用最小二乘法估計(jì)數(shù)據(jù)的局部規(guī)律和趨勢,隨著提取范圍的推進(jìn),得到連續(xù)平滑的擬合曲線,計(jì)算平滑數(shù)據(jù)與原數(shù)據(jù)的殘差,再利用3σ準(zhǔn)則判別出異常值,其具體算法如下:
設(shè)所測數(shù)據(jù)序列為{xi,yi},i=1,2,…,n,其數(shù)據(jù)模型關(guān)系如下:
yi=g(xi)+εi.
(1)
式中:g為多項(xiàng)式平滑函數(shù),εi為均值為0的獨(dú)立分布的隨機(jī)變量。
設(shè),局部加權(quán)回歸的權(quán)函數(shù)為w(x),權(quán)函數(shù)w(x)一般選取3次權(quán)重函數(shù),如式(2)所示:
(2)
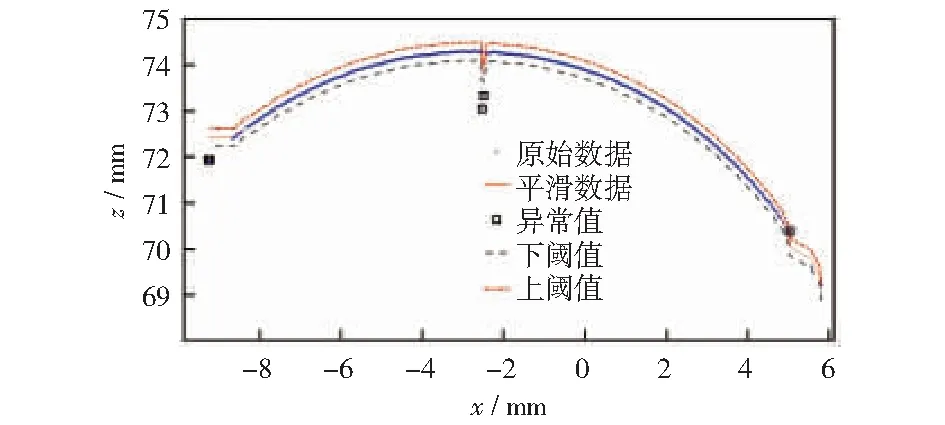
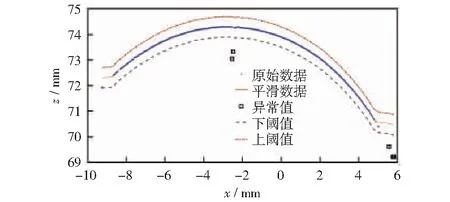
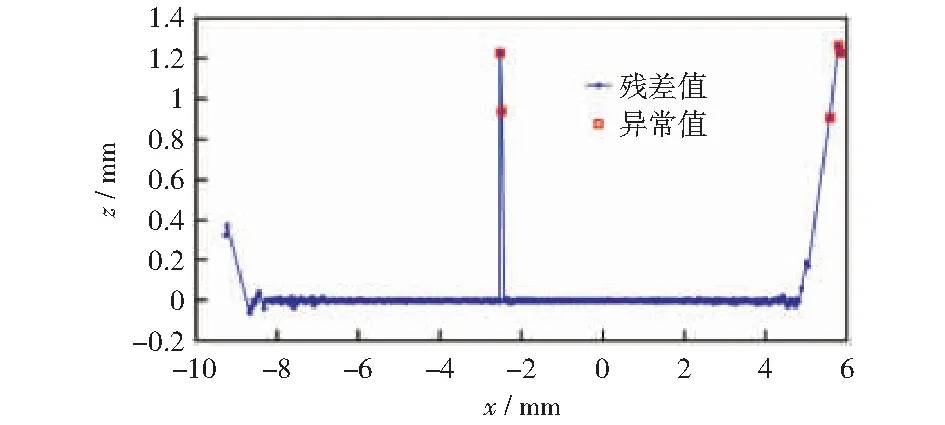
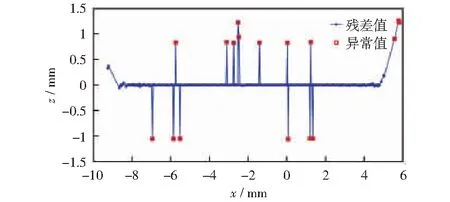
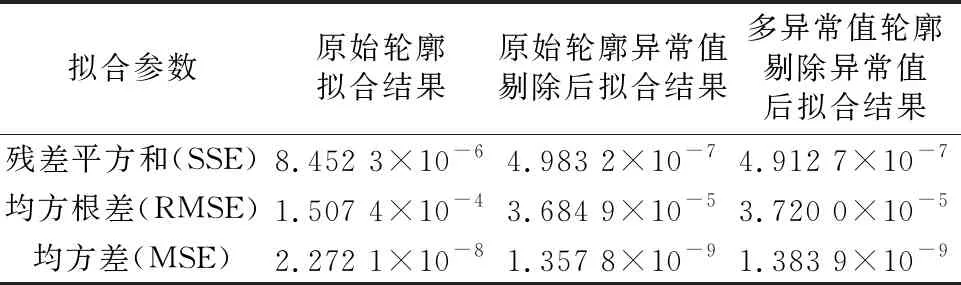
設(shè),平滑系數(shù)為f,且0 首先以各觀測點(diǎn)xi為中心,選取適當(dāng)?shù)膄,確定其移動(dòng)窗寬為xi±r. 再根據(jù)所選權(quán)函數(shù)w(x),以xi為中心,為窗內(nèi)各數(shù)據(jù)得到對應(yīng)的權(quán)重w(xi),如式(3)所示: (3) (4) 此時(shí),設(shè)定穩(wěn)健局部加權(quán)回歸的4次魯棒權(quán)重函數(shù)Q(zi),如式(5)所示: (5) (6) 重復(fù)上述魯棒增強(qiáng)步驟,經(jīng)過多次迭代,最終得到的穩(wěn)健局部加權(quán)擬合值。 (7) 當(dāng)所測數(shù)據(jù)殘差與其均值之差大于3倍標(biāo)準(zhǔn)差時(shí),即認(rèn)為是異常值,如式(8)所示: (8) 針對典型輪廓數(shù)據(jù),采取不同的移動(dòng)窗寬,分別運(yùn)用移動(dòng)均值識別法和基于穩(wěn)健局部加權(quán)回歸的異常值識別法開展孤立異常值的識別和分析。 3.1.1移動(dòng)均值法識別異常值 移動(dòng)均值法是較為經(jīng)典的異常值識別法,其基本思路為依次提取指定窗寬內(nèi)的局部數(shù)據(jù),計(jì)算其局部均值和局部標(biāo)準(zhǔn)差,再利用3σ準(zhǔn)則判斷異常值。實(shí)驗(yàn)中,移動(dòng)窗寬從5逐步增加,觀察其識別效果。如圖3所示,窗寬增加到17時(shí),才識別出數(shù)據(jù)中部的單個(gè)孤立異常點(diǎn);當(dāng)窗寬擴(kuò)展到28時(shí),才能正確識別出數(shù)據(jù)中部的雙點(diǎn)孤立異常值,如圖4所示。圖中圓點(diǎn)數(shù)據(jù)為所獲輪廓數(shù)據(jù),方框?yàn)樽R別出的異常值。 圖3 當(dāng)窗寬為17時(shí)移動(dòng)均值法識別出的異常值 圖4 當(dāng)窗寬為28時(shí)移動(dòng)均值法識別出的異常值 由圖3,4可見,異常值的存在,使得局部均值大幅度提高,異常值所處位置的判別閾值出現(xiàn)大幅度的增加。隨著窗寬增加,中部閾值曲線逐漸平滑,上、下閾值范圍逐漸減小,輪廓中部異常值識別能力有所提高;然而隨著窗寬的增加,輪廓兩側(cè)的上、下閾值范圍卻明顯增加,表明輪廓兩側(cè)的異常值識別能力會(huì)隨窗寬的增加而下降。 3.1.2穩(wěn)健局部加權(quán)回歸法識別異常值 利用基于穩(wěn)健局部加權(quán)回歸的異常值識別法對該輪廓進(jìn)行識別。選取不同的移動(dòng)窗寬觀察輪廓的平滑效果以及異常值識別情況。當(dāng)窗寬為5時(shí),如圖5所示,該方法已能識別出輪廓中部的雙點(diǎn)孤立異常值,但受異常值影響,其平滑曲線及其上下判別閾值隨之波動(dòng),并將輪廓兩端部分間斷點(diǎn)識別為異常值。 圖5 當(dāng)窗寬為5時(shí)RLWR法識別異常值 逐步增加窗寬,當(dāng)窗寬為9時(shí),如圖6所示,所擬合曲線和上下閾值曲線更為平滑,僅在輪廓兩端,曲線出現(xiàn)輕微偏移。 圖6 當(dāng)窗寬為9時(shí)RLWR法識別異常值 圖7為原始數(shù)據(jù)與平滑數(shù)據(jù)的殘差值,利用3σ準(zhǔn)則識別出孤立異常值,以及輪廓右端異常數(shù)據(jù)。輪廓端部異常數(shù)據(jù)的產(chǎn)生的原因主要是激光在圓弧邊緣存在邊緣效應(yīng),產(chǎn)生異常間斷數(shù)據(jù)點(diǎn),形成測量誤差,進(jìn)而造成擬合平滑曲線的偏移。 圖7 當(dāng)窗寬為9時(shí)原始數(shù)據(jù)與平滑數(shù)據(jù)的殘差 當(dāng)窗寬繼續(xù)增加,其異常值識別效果與圖7基本相同,所以該方法在窗長≥9時(shí)都可以識別輪廓中的孤立型異常值,并將輪廓兩端,特別是右側(cè)異常間斷數(shù)據(jù)點(diǎn)加以識別。 在激光視覺測量過程中,可能存在多個(gè)孤立異常值,對異常值識別提出了更高的要求。由上節(jié)可知,移動(dòng)均值法識別多孤立異常值基本無法實(shí)現(xiàn),所以僅對穩(wěn)健局部加權(quán)回歸法識別多孤立異常值的能力進(jìn)行驗(yàn)證。 在原有輪廓的基礎(chǔ)上增加多個(gè)隨機(jī)孤立異常值,對其進(jìn)行異常值識別,識別效果如圖8所示;原數(shù)據(jù)與平滑數(shù)據(jù)的殘差值,如圖9所示。 圖8 當(dāng)窗寬為9時(shí)RLWR法識別多孤立異常值 圖9 當(dāng)窗寬為9時(shí)原始數(shù)據(jù)與平滑數(shù)據(jù)的殘差 由圖8,9可見,在移動(dòng)窗長為9時(shí),基于穩(wěn)健局部加權(quán)回歸的異常值識別法,能將所有孤立異常值以及右端的異常數(shù)據(jù)識別,展現(xiàn)出較強(qiáng)的多孤立異常值識別能力。 在此采用圖6和圖8的識別結(jié)果,剔除異常值,利用非線性最小二乘法進(jìn)行橢圓擬合;同時(shí)對保留異常值的原輪廓進(jìn)行擬合,最終得到異常值去除前、后的輪廓擬合對比結(jié)果,如圖10、圖11所示。 圖10 原始輪廓異常值處理前、后的橢圓擬合效果 圖11 多孤立異常值剔除前、后的橢圓擬合效果 依據(jù)測量數(shù)據(jù)和擬合結(jié)果計(jì)算出異常值剔除前后的擬合橢圓參數(shù),如表1所示。結(jié)合圖、表分析剔除異常值前、后的擬合橢圓。觀察圖10,原始輪廓異常值處理前、后的擬合橢圓存在較大差異,原始數(shù)據(jù)的擬合橢圓圓心為“*”,其長軸直徑為12.613 2 mm,短軸直徑僅為4.875 1 mm,離心率達(dá)到0.922 3;而剔除異常值后,擬合橢圓圓心為“+”,長軸直徑為19.475 5 mm,短軸直徑為18.779 8 mm,離心率為0.264 9,更為符合測量實(shí)際。圖11為多孤立異常值輪廓在剔除異常值前、后的橢圓擬合效果,在多孤立異常值情況下,輪廓數(shù)據(jù)已無法進(jìn)行橢圓擬合,擬合結(jié)果不收斂;而采用RLWR法則能有效剔除全部異常值,其擬合橢圓參數(shù)與圖10剔除異常值后的擬合橢圓參數(shù)基本一致。 表1 異常值處理前后的擬合橢圓參數(shù) 在橢圓擬合的同時(shí),對輪廓異常值處理前后的擬合誤差進(jìn)行了分析,結(jié)果如表2所示。 表2 異常值處理前后的橢圓擬合誤差 原始輪廓異常值剔除后,擬合誤差大幅減小,其殘差平方和SSE由8.452 3×10-6減少到4.983 2×10-7;均方差MSE由1.507 4×10-4減少到3.684 9×10-5;均分根差RMSE則由2.272 1×10-8降為1.357 8×10-9.同樣,多孤立異常值的輪廓在剔除異常值后,其擬合誤差也大幅減小,與原輪廓異常值剔除后的擬合誤差基本一致。上述實(shí)驗(yàn)結(jié)果說明利用穩(wěn)健局部加權(quán)回歸識別法剔除異常值可以使截面橢圓的擬合誤差大幅度減小,擬合結(jié)果更加精確。 本文采用基于激光視覺的輪廓測量系統(tǒng)對棒材輪廓進(jìn)行了測量。針對測量中出現(xiàn)的孤立異常值,提出了一種基于穩(wěn)健局部加權(quán)回歸的異常值識別法,并與移動(dòng)平均識別法進(jìn)行了對比,探討了不同移動(dòng)窗寬下的識別效果,及其處理多孤立異常值的能力。隨后利用非線性最小二乘法對異常值剔除前、后的數(shù)據(jù)進(jìn)行了橢圓擬合,并計(jì)算了各擬合橢圓參數(shù)和擬合誤差。進(jìn)一步證明基于穩(wěn)健局部加權(quán)回歸的異常值識別法相較于移動(dòng)均值法等傳統(tǒng)識別方法,具有較強(qiáng)的異常值識別能力,簡便高效,魯棒性好,對提高激光輪廓在線測量精度具有重要作用。




3 激光輪廓的異常值識別實(shí)驗(yàn)
3.1 典型輪廓的識別
3.2 多孤立異常值的識別

4 輪廓擬合效果分析



5 結(jié)束語
猜你喜歡
小學(xué)科學(xué)(學(xué)生版)(2021年5期)2021-07-22 02:40:06
中學(xué)生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學(xué)少年(2017年4期)2017-06-20 23:25:16
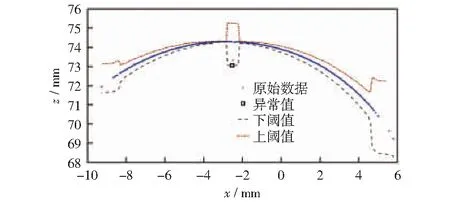
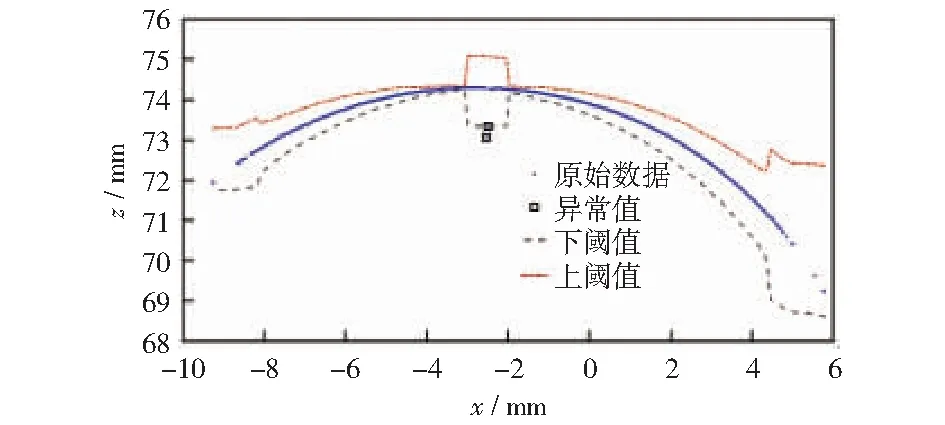
軍事文摘·科學(xué)少年(2017年2期)2017-04-26 21:58:43
中學(xué)生數(shù)理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學(xué)低年級版)(2015年4期)2015-04-29 00:00:00
