一種鉸鏈四桿機構仿真教學課件的開發
2021-03-17 07:32:50費冬青
微型電腦應用 2021年2期
關鍵詞:動畫
費冬青
(上海開放大學閔行二分校 機械電子工程專業, 上海 200240)
0 引言
在鉸鏈四桿機構的教學過程中,許多內容需要借助于圖形才能講解清楚;但若使用靜態的圖形,學生理解起來還存在一定困難;目前,新的多媒體教學手段層出不窮,若要開發一些訂制的課件,條件是具備的;通過查閱知網平臺,未發現有類似的文獻。所以完成這篇關于鉸鏈四桿機構仿真教學課件開發的文章,具有一定的創新意義。
1 鉸鏈四桿機構定義
四個構件都用轉動副連接的四桿機構,稱為鉸鏈四桿機構[1],如圖1所示。
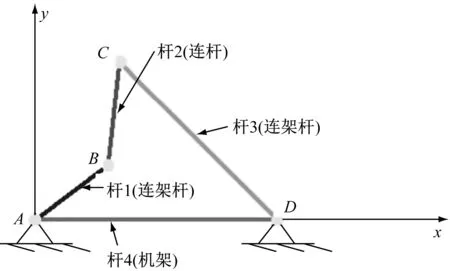
圖1 鉸鏈四桿機構示意圖
其中,固定不動的桿4稱為機架,與機架直接相連的桿1和桿3稱為連架桿,在兩連架桿中,能做整周轉動的連架桿稱為曲柄,不能做整周轉動的連架桿稱為搖桿,與機架不相連的桿2稱為連桿。
2 求解從動桿位置
鉸鏈四桿機構封閉矢量圖,如圖2所示。
AB為原動桿,CD為從動桿。求解從動桿位置就是在已知θ1的條件下,求θ3。由圖2所示封閉矢量圖,如式(1)。
(1)
由式(1)得式(2)。
lAB·cos(θ1)+i·lAB·sin(θ1)+lBC·cos(θ2)+i·lBC·sin(θ2)=
lAD+lDC·cos(θ3)+i·lDC·sin(θ3)
(2)
由式(2)得式(3)。
(3)
將式(3)消去θ2,如式(4)。

(2·lAD·lDC-2·lDC·lAB·cos(θ1))·cos(θ3)-
2·lDC·lAB·sin(θ1)·sin(θ3)
(4)
在式(4)中,設
A=2·lDC·lAB·sin(θ1)
B=2·lDC·lAB·cos(θ1)-2·lAD·lDC
得式(5)。
(5)
則上式變為式(6)。
C+Bcos(θ3)+Asin(θ3)=0
(6)
將


(7)
整理后,如式(8)。
(C-B)·x2+2·A·x+C+B=0
(8)
解這個一元二次方程,如式(9)。

(9)
則得式(10)、式(11)。
(10)
(11)

3 鉸鏈四桿機構類型的判別[2]
如前述圖1所示,當l桿1=l桿3并且l桿2=l桿4時,為平行四邊形機構,平行四邊形機構按主動桿與從動桿轉向是否相同,還分為正平行四邊形機構與反平行四邊形機構。
當最短桿長度與最長桿長度之和,小于或等于其他兩桿長度之和時。
(1) 若最短構件為連架桿,則該機構一定是曲柄搖桿機構。
(2) 若最短構件為機架,則該機構一定是雙曲柄機構。
(3) 若最短構件為連桿,則該機構一定是雙搖桿機構。
當最短桿長度與最長桿長度之和,大于其他兩桿長度之和時,則該機構必為雙搖桿機構。
4 鉸鏈四桿機構仿真教學課件設計
4.1 計算從動桿角度
k = 0
For j = 0 To 360 '從動桿角度清零
從動桿角度(j) = 0
Next j
If ltype = 1 Then '曲柄搖桿,1桿為曲柄
For j = 0 To 359
i = j * pi / 180
A = 2 * 桿長(1) * 桿長(3) * Sin(i)
B = 2 * 桿長(3) * (桿長(1) * Cos(i) - 桿長(4))
C = 桿長(2) ^ 2- 桿長(1) ^ 2- 桿長(3) ^ 2- 桿長(4) ^ 2 + 2 * 桿長(1) * 桿長(4) * Cos(i)
If (A ^ 2 + B ^ 2- C ^ 2) >= 0 Then
原動桿角度(k) = i
atn3 = Atn((A- (Sqr(A ^ 2 + B ^ 2- C ^ 2))) / (B- C))
從動桿角度(k) = 2 * atn3
k = k + 1
End If
縱觀2007-2016十年來中國嬰幼兒配方乳粉進口貿易的發展,本文從規模、來源國和進口價格三個方面分析其貿易特征。
Next j
End If
以上程序中,將原動件以一度為步進值旋轉一圈共360度,然后由式(5)確定A、B與C,由式(10)計算θ3/2,然后得到從動桿角度θ3。
4.2 繪制機構動態圖
動畫演示窗口.DrawWidth = 4
a1 = 原動桿角度(g)
a3 = 從動桿角度(g)
x1 = 桿長(1) * rr * Cos(a1)
y1 = 桿長(1) * rr * Sin(a1)
x3 = 桿長(4) * rr + 桿長(3) * rr * Cos(a3)
y3 = 桿長(3) * rr * Sin(a3)
動畫演示窗口.Line (0, 0)-(x1, y1), vbBlue
動畫演示窗口.Line (x1, y1)-(x3, y3), vbRed
動畫演示窗口.Line (x3, y3)-(桿長(4) * rr, 0), vbGreen
動畫演示窗口.Line (0, 0)-(桿長(4) * rr, 0), vbMagenta
動畫演示窗口.FillStyle = 0
動畫演示窗口.FillColor = vbYellow
動畫演示窗口.Circle (桿長(4) * rr, 0), 0.5, vbYellow
動畫演示窗口.Circle (0, 0), 0.5, vbYellow
動畫演示窗口.Circle (x1, y1), 0.5, vbYellow
動畫演示窗口.Circle (x3, y3), 0.5, vbYellow
上面程序中,rr為尺寸調整因子。該段代碼為繪圖子程序,在時間控件的事件中調用,調用時帶入原動桿角度數組與從動桿角度數組。
4.3 課件演示
本課件可以顯示平行四邊形機構、曲柄搖桿機構(1桿為曲柄)、曲柄搖桿機構(3桿為曲柄)、雙曲柄機構與雙搖桿機構共五種機構的動態運行圖。其中,平行四邊形機構、曲柄搖桿機構(3桿為曲柄)與雙搖桿機構這三種機構在編程上有特殊點,所以下面重點介紹一下。
4.3.1 平行四邊形機構
平行四邊形機構可以分別演示正平行四邊形機構與反平行四邊形機構。反平行四邊形機構,如圖3所示。
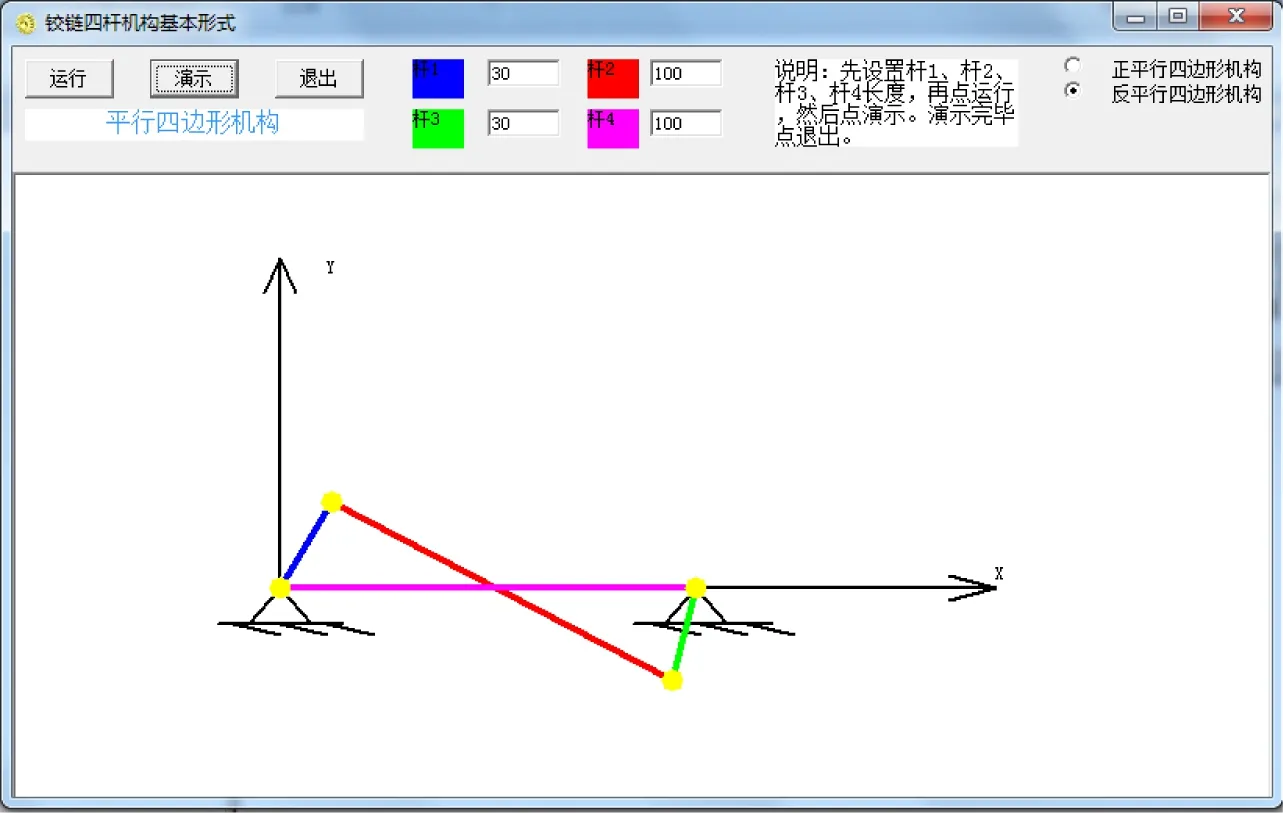
圖3 反平行四邊形機構
根據反平行四邊形機構的運動連續性,在原動件的角度θ1在0°-180°變化時,θ3計算公式里面的?號取正號;在原動件的角度θ1在181°-359°變化時,θ3計算公式里面的?號取負號;正平行四邊形機構則正好相反,在原動件的角度θ1在0°-180°變化時,θ3計算公式里面的?號取負號;在原動件的角度θ1在181°-359°變化時,θ3計算式里面的?號取正號。
反平行四邊形機構計算θ2/2的代碼如下。
If Option2.Value = True Then
If j <= 180 Then
atn3 = Atn((A + (Sqr(A ^ 2 + B ^ 2- C ^ 2))) / (B- C))
End If
If j > 180 Then
atn3 = Atn((A- (Sqr(A ^ 2 + B ^ 2- C ^ 2))) / (B- C))
End If
End If
4.3.2 曲柄搖桿機構(3桿為曲柄)
曲柄搖桿機構(3桿為曲柄),如圖4所示。
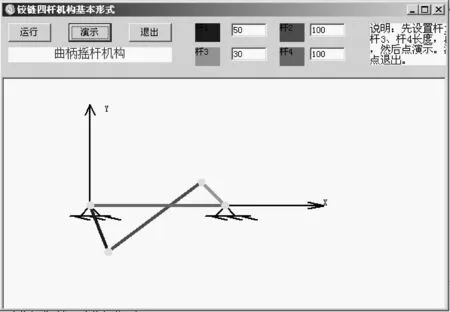
圖4 曲柄搖桿機構(3桿為曲柄)
3桿為曲柄時,計算從動桿角度的代碼與常規的不同,代碼如下。
If ltype = 4 Then '曲柄搖桿,3桿為曲柄
For j = 359 To 0 Step-1
i = j * pi / 180
A = 2 * 桿長(3) * 桿長(1) * Sin(i)
B = 2 * 桿長(1) * (桿長(3) * Cos(i) + 桿長(4))
C = 桿長(2) ^ 2- 桿長(3) ^ 2- 桿長(1) ^ 2- 桿長(4) ^ 2- 2 * 桿長(3) * 桿長(4) * Cos(i)
If (A ^ 2 + B ^ 2- C ^ 2) > 0 Then
從動桿角度(k) = i
atn3 = Atn((A- (Sqr(A ^ 2 + B ^ 2- C ^ 2))) / (B- C))
原動桿角度(k) = 2 * atn3
k = k + 1
End If
Next j
End If
在以上代碼中可以看到,當以3桿為曲柄時,相當于把第2節的求解從動桿位置重新再算一遍,只不過這次是以θ3為已知量,θ1為未知量。所以這段代碼中B與C的計算公式與常規的是不一樣的。此外j也改為從359逆向循環到0,這樣是為了使3桿順時針轉動。
4.3.3 雙搖桿機構
雙搖桿機構,如圖5所示。
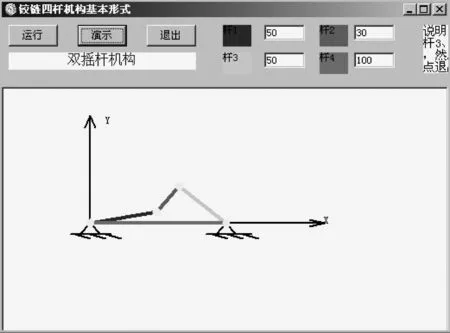
圖5 雙搖桿機構
雙搖桿機構的主動件與從動件都不能360度轉動,所以主動桿角度數組與從動桿角度數組中沒有存放360個值;所以在動態運行時,需要用一個變量來控制其轉向的切換,代碼如下。
If ltype = 2 Then '雙搖桿
If switch = 1 Then 'switch控制轉向
動畫演示循環變量 = 動畫演示循環變量 + 1
If 動畫演示循環變量 < k Then 'k表示數組中共有幾個數據
Call 繪制動畫幀(桿長(), 從動桿角度(), 動畫演示循環變量, 動畫演示窗口)
Else
switch =-1
End If
End If
If switch =-1 Then
動畫演示循環變量 = 動畫演示循環變量- 1
If 動畫演示循環變量 > 0 Then
Call 繪制動畫幀(桿長(), 從動桿角度(), 動畫演示循環變量, 動畫演示窗口)
Else
switch = 1
End If
End If
End If
5 總結
鉸鏈四桿機構仿真教學課件的開發,是對教學資源建設的有益創新與補充,在實際的教學應用中收到了很好的效果。實際上,很多教師都有這種能力,只要把信息化的工具利用起來,開發一些有利于學生理解的課件,一定能顯著提高教學效果。
猜你喜歡
動漫界·幼教365(大班)(2024年7期)2024-12-31 00:00:00
瘋狂英語·新讀寫(2022年3期)2022-11-22 09:51:45
小哥白尼(趣味科學)(2021年12期)2021-03-16 05:40:38
小學科學(學生版)(2020年10期)2020-10-28 07:52:18
四川工商學院學術新視野(2020年2期)2020-08-13 03:18:30
文苑(2019年22期)2019-12-07 05:28:56
流行色(2019年7期)2019-09-27 09:33:28
新聞傳播(2018年3期)2018-05-30 07:01:39
小學生必讀(低年級版)(2017年5期)2017-08-12 03:47:07
學生天地(2016年9期)2016-05-17 05:45:06
