基于傾斜攝影的三維測圖在地形圖測繪中的應用
2021-03-17 02:04:45王天驕
甘肅科技縱橫 2021年11期
摘要: 無人機傾斜攝影裸眼立體測圖技術以其全自動、高效率、高精度、高精細的特點目前廣泛應用于1:500高精度大比例尺地形圖測繪、不動產測量、農房一體測量、資源調查等領域,解決了常規測量成本高、周期長、效率低的技術難題,是測繪領域的一項新技術。本文從技術層面上探討了基于無人機傾斜攝影三維測圖技術在大比例尺測繪作業中的應用,對其作業流程及技術要點進行了總結。
關鍵詞:無人機傾斜攝影;三維場景建模;三維測圖;大比例尺測圖
中圖分類號:P231
采用傳統的全站儀或GPS接收機測量方法時,普遍存在“觀測死角”而無法直接進行測量,只能采取圖解法獲取坐標值和幾何尺寸,勢必影響成果精度。依托無人機傾斜攝影測量技術數據采集成本低、效率高、精度高,重建的三維模型現勢性好等特點[1],將無人機傾斜攝影測量三維建模技術應用于大比例尺地形圖生產有著諸多優勢,解決了傳統測圖過程中遇到的通視條件、人工難以獲取區域和居民不配合等問題,減少了外業強度和工作量,極大提高了工作效率。
1? 傾斜攝影技術
無人機攝影測量技術,通過在同一飛行平臺上搭載多鏡頭相機,同時從一個垂直、四個傾斜等五個不同的角度采集影像,獲取更為完整精確的地面地物信息[1]。同時還可獲取到豐富的建筑物頂面及側視的高分辨率紋理,通過先進的定位、融合、建模等技術,生成真實的三維模型,真實地反映地物情況[2],而內業可直接在傾斜實景三維數據上進行測量,實現了在高精度航空攝影的基礎上,完成數字線劃圖等數字地圖產品的快速生產。
2? 無人機傾斜攝影技術要點
2.1? 飛行設計
根據實際測區情況,來設置飛行參數,根據成果精度要求來設定飛行高度,計算航向和旁向距離,制定飛行計劃。。
1)? 航高確定
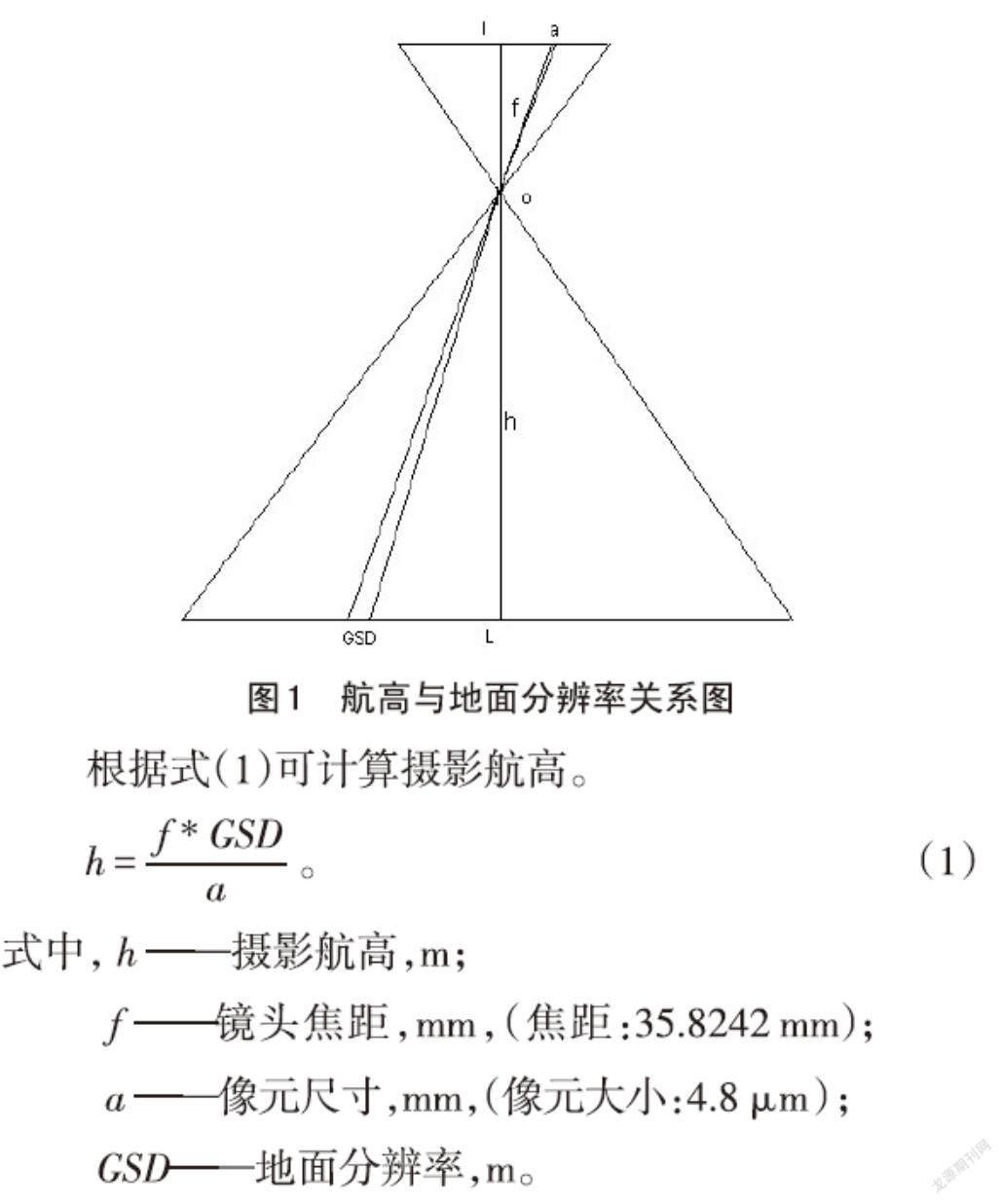
無人機傾斜攝影的飛行高度是航線設計的基礎,實際作業中需根據地面分辨率(GSD)要求,結合傾斜相機的性能來確定航高。航高與地面分辨率關系如圖1所示:
根據式(1)可計算攝影航高。
(1)
式(1)中:h—攝影航高,單位為米(m);
f—鏡頭焦距,單位為毫米(mm);(焦距:35.8242mm)
a—像元尺寸,單位為毫米(mm);(像元大小:4.8μm)
GSD—地面分辨率,單位為米(m)。
2)? 像片重疊率
低空數字航空攝影規范規定“航向重疊度一般應為 60% ~ 80%; 旁向重疊度一般應為 15% ~ 60%”。由于無人機的種類、飛行區域天氣環境以及建筑物的高度、密度等因素都會對像片重疊度造成影響,同時又要保證模型的精度和細節,考慮飛行作業及內業數據處理的效率,在無人機傾斜攝影航線設計及實際作業過程中,需依實際情況根據地面分辨率和相對航高確定重疊度。一般情況下,確定航向重疊率為80%,旁向重疊率為75%。
3)? 航線設計原則
在規劃航線時,航線長度越長越好。頻繁換航會導致飛機經常性的減速、轉向,浪費時間與電量。所以,為了提高作業效率,降低作業成本,規劃航線時應盡量以長航線為主。
航線一般按東西向平行于圖廓線直線飛行,特定條件下亦可作南北向飛行或沿線路、河流等方向飛行,測區內建筑物密集區域,飛行主航線方向應按橫切房屋復雜面。
4)? 飛行計劃原則
由于天氣條件的制約,航攝飛行時間決定了影像的質量。在制定飛行計劃時,要考慮天氣的水平能見度、垂直能見度、氣流的穩定性等因素,保證影像的清晰度,避免大面積陰影、云影、反光等現象。
2.2? 攝影數據檢查
飛行任務完成后,應及時對航攝作業的飛行質量以及所拍攝影像質量進行檢查,如實際影像重疊度、像片傾角和旋角、航線彎曲度,攝取覆蓋范圍、影像的清晰度、像點位移等。如果檢查內容不滿足任務要求,則應根據實際情況重新擬定飛行計劃對局部區域補飛或重飛。
2.3控制點布設
1)像控點選點原則
①像控點位的布設,應堅持“角點布設,中間加密,均勻布設”的原則,設計像控點位。
②像控點應該選擇航攝像片上影像清晰、目標明顯的像點。
②實地選點時,也需考慮側視相機是否會被遮擋。
④對于弧形地物、陰影、狹窄溝頭、水系、高程急劇變化的斜坡、圓山頂、跟地面有明顯高差的房角、圍墻角等以及航攝后有可能變遷的地方,均不應當做選擇目標。
2)像控點布設要求
①大面積布設像控點等長度分割布設,200m-300m布設一個。
②像控點的布設噴標宜設置為L型,RTK測量其外拐點,像控點標志物應與地表顏色形成鮮明對比,以提高刺點精度,保證成圖精度。
③像控點噴標要大小合適且清晰可見,采用RTK測量是需要至少測量三遍,且中途需要斷開RTK連接。
④在地形起伏落差較大的地方布設像控點,在均勻布設的前提下,考慮其地形起伏處高點、低點均布設像控點。
⑤在存在水域的地區因水面需要在水域四周額外增加控制點。
⑥像控點需選擇較為尖銳的標志物,以提高內業精度。
⑦若工作人員選擇地物特征點作為像控點,應選擇較大地物,且提供現場照片2-4張,輔助內業人員尋找像控點。
2.4像控點測量
1)像控點GPS動態測量
采用CORS網測量的像控點,圖根點點位應處于視野開闊,周圍對空高大建筑物較少,目距離無線電發射源大于50m的地方。
為了保證像控點的觀測精度,像控點觀測時必須在內部附合坐標精度小于±3㎝以內時記錄數據,并且每個像控點要獨立觀測五次,在平面與高程觀測值校差均小于±5cm時取中數。
2)像控點靜態測量
當遇到無法接收CORS網絡信號、內部附合精度無法達到限差、或多次獨立觀測較差無法達到要求等情況時,像控點須采用靜態GPS觀測。
3? 三維場景建模
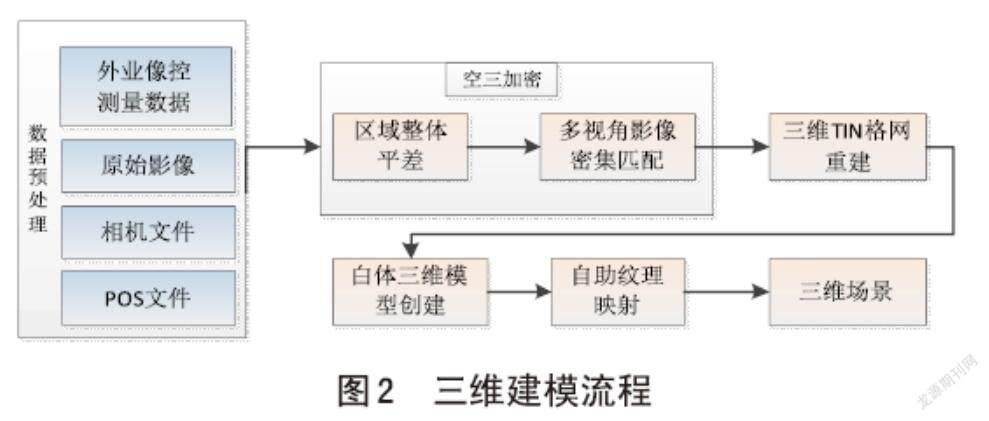
三維建模包括數據預處理(POS解算整理、影像檢查、影像調整)、相對定向、絕對定向、空中三角測量,3d模型重建[3]。三維場景建模流程如圖2所示。
1)數據預處理
采用CC軟件在進行數據處理之前,需要將獲取的航攝影像數據、POS數據、像控測量數據進行預處理。影像預處理主要是進行格式轉換、對比度調整、曝光調整、白平衡編輯、降噪等。同時需對對獲取的相片數據進行整理,對相片數據名稱進行更改,使之與POS數據一一對應,從而保證數據格式正確和資料完整。預處理后,將數據導入軟件進行相應建模處理。
2)空三加密
空三加密是為了能夠將無序的影像在空間中相互對齊并構建與真實狀態下相接近的統一的空間模型,是以航空相片上量測的像點坐標為依據,采用嚴密的數學模型,按最小二乘法原理,以少量地面控制點為依據,快速求解影像的定向及地面點加密[4]。目前,采用無人機傾斜攝影測量時,內頁通常采用光束法區域網聯合平差的方法進行數據處理,將控制點坐標數據與像片的POS姿態數據作為外方位元素的初始值進行平差。
3)模型構建
模型構建包括密集點云生成、TIN模型構建和紋理自動映射。根據空中三角測量解算出的影像外方位元素,通過多視角密集點云匹配可獲得高密度的數字點云。將點云數據分塊后再進行不同層次細節度下的TIN模型構建[5],并根據三角網所構成的曲度變化對TIN模型進行簡化,將優化后的模型和紋理影像進行配準和貼圖,同時為帶紋理的模型建立多細節、多層次的LOD,經過處理后即可獲得三維場景模型[6]。
4)模型優化
無人機傾斜攝影三維模型建立過程中,由于無人機姿態變化、大氣環境、影像主控點落水等外業原因,會導致無人機傾斜影像的重疊度、幾何畸變等問題,進而導致三維模型出現飛面、凸包、紋理不均、破洞,水面缺失等問題,造成視覺誤差和應用障礙,因此需要在初始三維模型的基礎上對其進行二次優化處理。
①幾何修復可以對模型中的破洞、凸包等進行修補、抹平還原,同時篩除飛面碎步[7]。
②細節整理裝飾可利用替換或者修補措施,對重要地物、標志物的問題處理。
③紋理修理則可通過替換、修補等措施,進行不均勻紋理處理。
4數據采集與編輯
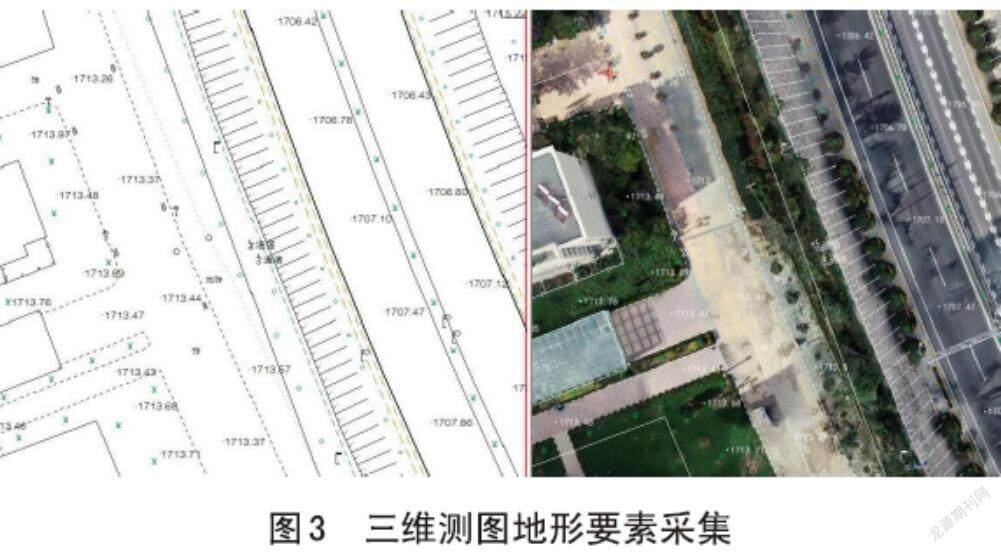
在EPS軟件平臺三維測圖環境下,加載導出的OSGB格式三維場景模型和正射影像數據,采用二三維聯動一體化測圖模式進行數據采集,地形要素矢量化在編輯操作在二三維窗口皆可自由切換,有效提高了數據采集效率。采集數據時應選擇清晰度較高的特征點以及最佳視角,避免出現坐標飄逸情況。EPS環境中三維模型地形數據采集如圖3所示:
在裸露地表或非林深樹茂區域,通過EPS的地模處理模塊,在實景三維模型的基礎上,可通過自動提取高程點,結合地形地物的特征點和特征線,基于高程點生成不規則三角網或方格網,從而實現等高線的自動生成。EPS環境中三維模型地貌數據采集如圖4所示:
對于不能通過模型判讀的地物、由于地物存在嚴重遮擋造成三維模型局部變形而難以采集的地物以及部分地物的屬性信息,通過外業調繪后再進行數據編輯整理。
5? 結論
在大比例尺地形圖生產過程中,采用基于無人機傾斜攝影的三維測圖技術,技術路線可行,產品質量可控,具有數據處理自動化程度高、數據采集工作量小、數據生產效率高等特點,避免了傳統測量外業工作強度大,干擾因素多的問題。同時,該技術可生產完成三維模型,正射影像、三維場景、數字線劃圖等豐富的數據成果,這些成果可廣泛應用于自然資源調查、不動產測量、地質災害應急保障、三維地籍管理、三維城市建設等領域,可產生較好的社會經濟效益,具有廣闊的應用前景和推廣價值。
參考文獻
[1]曹洪濤,高偉,張海峰,張亮,邊延凱.無人機傾斜攝影分辨率建模與分析[J].地理空間信息,2019,17(01):14-15+40+10.
[2]原喜屯,高鵬偉.基于傾斜攝影三維建模的不動產高效測繪[J].北京測繪,2018,32(10):1138-1142.
[3]原明超,仇俊.無人機傾斜攝影測量在三維模型測圖中的應用[J].測繪通報,2020(07):116-119+142.
[4]邱春霞,董乾坤,劉明.傾斜影像的三維模型構建與模型優化[J].測繪通報,2017(05):31-35.
[5]范攀峰,李露露.基于Smart3D的低空無人機傾斜攝影實景三維建模研究[J].測繪通報,2017(S2):77-81.
[6]馮啟翔.基于無人機傾斜攝影技術的三維實景建模技術研究[J].地理空間信息,2018,16(08):34-37+7.
[7]馬昭輝.無人機傾斜攝影實景三維建模分析與質量評價[J].中小企業管理與科技(中旬刊),2019(06):135-136.
基金項目:無
作者簡介:王天驕(2000—,男,北京建筑大學測繪與城市空間信息學院本科在讀,主要研究遙感科學與技術。
