行人主動安全系統對交通流運行狀態影響分析
2021-03-15 11:50:04孫智誠趙俊瑋
重慶交通大學學報(自然科學版) 2021年3期
華 珺,孫智誠,趙俊瑋,朱 彤,3
(1. 北京航空航天大學 交通科學與工程學院,北京 100191; 2. 長安大學 汽車學院,陜西 西安 710064;3. 長安大學 汽車運輸安全保障技術交通行業重點實驗室,陜西 西安 710064)
0 引 言
行人是道路交通環境中的弱勢群體。據歐盟統計,行人在交通事故中的死亡率是車內乘員的9倍。2017年中國道路交通事故中行人死亡17 286人,占總死亡人數的27.11%[1],這一比例在城市中更高。城市道路交通環境復雜,保護行人非常必要。
起初,技術人員采取被動安全防護措施來達到保護行人的目的,例如應用車身吸能材料來緩沖吸能,減少撞擊時車輛對行人的傷害。然而,被動安全方法的作用在于減輕行人的傷害嚴重程度,并不能防止事故的發生。主動安全系統由于能夠預測和避免車輛撞擊行人,已成為先進駕駛輔助系統的重要組成部分。主動安全系統包括用于觀察車輛周圍環境的傳感器、用于檢測可能發生危險的應用程序以及應對危險的執行器[2]。
行人檢測系統是一種車載駕駛輔助系統,通過檢測傳感器來探測、感知車輛前方行人,當存在碰撞風險但駕駛人未能觀察到行人或未能及時反應時,系統將發出警報提醒駕駛人或通過輔助制動干預駕駛人操作,預防和減輕人車碰撞傷害[3]。F.BELLA等[4]通過模擬駕駛輔助系統提供視聽覺信息,分析了不同駕駛人在不同場景下有行人過街時的行為,評估了行人檢測系統在多個道路環境中的有效性,結果表明系統有利于駕駛人實施更安全的讓行操作;D.J.SEARSON等[5]通過提取分析車輛碰撞速度分布數據,驗證了安裝行人檢測系統和自動緊急制動系統對于降低行人與車輛前部碰撞風險具有有效性。
人車通訊系統也是一種新興的行人主動安全系統,它基于P2V(pedestrian to vehicle)和V2P (vehicle to pedestrian)通訊技術,能夠實現人車間的信息交換,將潛在碰撞風險最小化。人車通訊系統在行人端通常通過智能手機應用體現。J.J.ANAYA等[6]開發的智能手機應用能夠在人車潛在沖突場景中提供wifi通訊、風險計算和危險警報功能,并設定最小通信距離為行人提供必要的感知和反應時間;K.DHONDGE等[7]開發的應用將車輛地理位置、行駛速度和運動方向發送至行人端,并通過試驗證明了該應用能夠在足夠的反應時間內,成功將潛在碰撞信息告知行人;A.HUSSEIN等[8]對其開發的智能手機應用進行了用戶調查,調查結果顯示用戶群體對該應用在行人安全性和使用便捷性方面的提升具有較高的滿意度。
過去的研究大多只關注了行人主動安全系統在微觀人車沖突場景下的安全效用[4,9],卻忽略了這些系統在長時間運行時對其他方面的影響。為此,筆者選擇特定人車交互場景,運用基于智能體建模思想,基于Net Logo仿真平臺,模擬交通流系統的運行機制,分析行人主動安全系統在不同道路限速值、車流量和行人規模等道路條件下對交通流穩定性及通行效率的影響。希望為未來自動駕駛環境下對行人等弱勢群體的保護以及人機交互系統的構建提供理論基礎和發展思路。
1 仿真試驗設計
1.1 場景選擇及模型建立
在車輛與行人碰撞導致行人傷亡的事故中,最為常見的是直行路段過街行人被直行車輛撞擊[10]。與綠燈時行人在人行橫道過街相比,無信號控制路段人行橫道處,行人過街具有更高的風險[11]。因此,選擇該場景下的人車交互為研究對象。
運用Net Logo搭建城市道路直行路段無信號控制人行橫道場景。在所建立的人車交互模型中,車輛智能體能夠在規定限速值下,自我調整行駛速度,根據周圍環境做出自己的判斷和決策。通過設置各參數變化范圍,使駕駛人群體、行人群體及道路條件的特征參數在其對應范圍內取不同值。
為比較不同系統性能差異,選擇傳統人工駕駛車輛、行人檢測系統車輛和人車通訊系統車輛分別進行仿真試驗,并假設不存在不同系統車輛混行的情況。上述3種車輛的最大差異在于對前方行人的感知能力不同。傳統人工駕駛車輛需要駕駛人來進行危險感知、決策和操作。駕駛人對前方道路信息的感知有80%來源于視覺,而駕駛過程中的視覺搜索能力通常與車速有關。潘兵宏等[12]研究得出了駕駛人視野范圍與車速的關系。行人檢測系統通過傳感器實現對行人的感知,多數車載傳感器能夠檢測車輛前方150 m范圍內的物體[13];特斯拉的Autopilot 2.0硬件系統能夠覆蓋360°可視范圍。人車通訊系統通常具有300 m全向有效范圍以實現人車雙向信息交換,能夠提供更準確和更廣泛的感知功能[14]。
1.2 自變量選取
車速不僅會影響駕駛人視野范圍,也會影響行人對人車間距的判斷,從而改變過街決策。A.SHEYKHFARD等[15]通過視頻拍攝分析了216條人車交互案例,結果顯示車速和人車間距是影響人車沖突發生的最重要因素。試驗設置不同道路限速值來控制車輛速度。車流量是影響人車碰撞的因素之一[16,17],其影響在試驗中不可忽視。行人規模體現在過街行人群體的數量,大量研究表明其對人車沖突及行人安全的影響作用[18,19]。在考慮行人過街安全性同時,也需研究相關因素對交通流穩定性和通行效率的影響。
1.3 觀察變量提取
交通流穩定性是考察道路中隨機出現的擾動對交通流狀態影響的一種有效分析指標,是衡量交通流運行質量的重要指標。若交通流穩定,則車速在合理范圍內有序波動,當受到外界干擾時,擾動會隨著時間演進而在交通流系統中逐漸減小并消失。若交通流不穩定,則不同時刻車速會發生無序變化,此時交通流效率、道路交通安全水平也隨之降低。試驗觀察序列車輛在不同道路條件下的速度波動,從而判斷不同變量對交通流穩定性的影響。
對于道路上行駛的車輛來說,人行橫道處過街的行人是路段的一個外部干擾,對路段交通流的運行效率存在一定影響。人車沖突導致車輛運行速度受影響,進而產生延誤。延誤常被作為評價道路運行效率的重要指標,也是學者研究行人過街所引發問題時常常關注的重點[20,21]。定義等待時間為車輛和行人到達和離開人行橫道處的時刻差[22]。試驗采用車輛等待時間和行人等待時間、行人速度反映車輛流和行人流的通行效率。根據以往研究,在仿真模型中設置行人速度范圍[23,24],使行人智能體在該范圍內自行調整速度。之后,觀察不同系統運行時行人速度的時間分布并對其加以分析。
2 試驗結果
2.1 序列車輛車速波動情況
隨著路段上車輛的運行,其平均速度不是恒定不變的,不同時刻存在差異。在相同的道路限速值、車流量和行人規模下,安裝不同車載系統的車輛的平均車速如圖1。仿真中時間單位為tick,距離單位為patch,車輛智能體速度單位為patches·tick-1。在仿真時段內,傳統車輛和行人檢測系統車輛的平均車速在一定范圍內呈現不同幅度的波動,而人車通訊系統車輛平均車速在仿真時段前期持續降低后逐漸穩定。
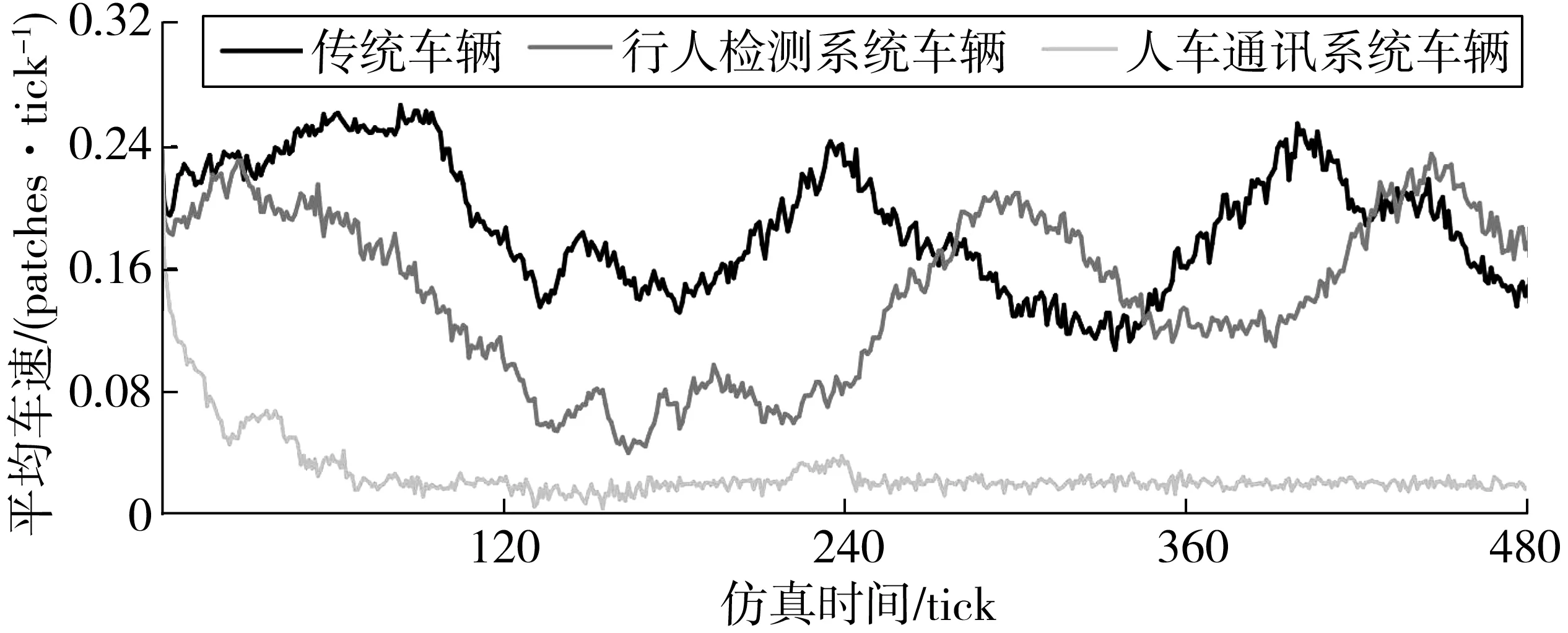
圖1 同限速值、同車流量、同行人規模下不同系統車輛的平均車速波動狀態
3種系統車輛在不同道路限速值下平均車速的時間序列值如圖2。在仿真時段內,隨著道路限速值取值的增大,傳統車輛平均速度的標準差逐漸增大,分別為0.019 4、0.037 4和0.042 9 patches·tick-1。這表明道路限速值越大,平均車速波動越大。這一發現同樣適用于行人檢測系統車輛,其平均車速標準差分別為0.027 8、0.052 3和0.053 8 patches·tick-1。在道路限速值相同時,行人檢測系統車輛速度波動比傳統車輛更大。人車通訊系統車輛平均速度分別從第71、80和117 tick開始趨于一個相對穩定的值。也就是說,限速值越大,平均車速越晚呈現穩定狀態。
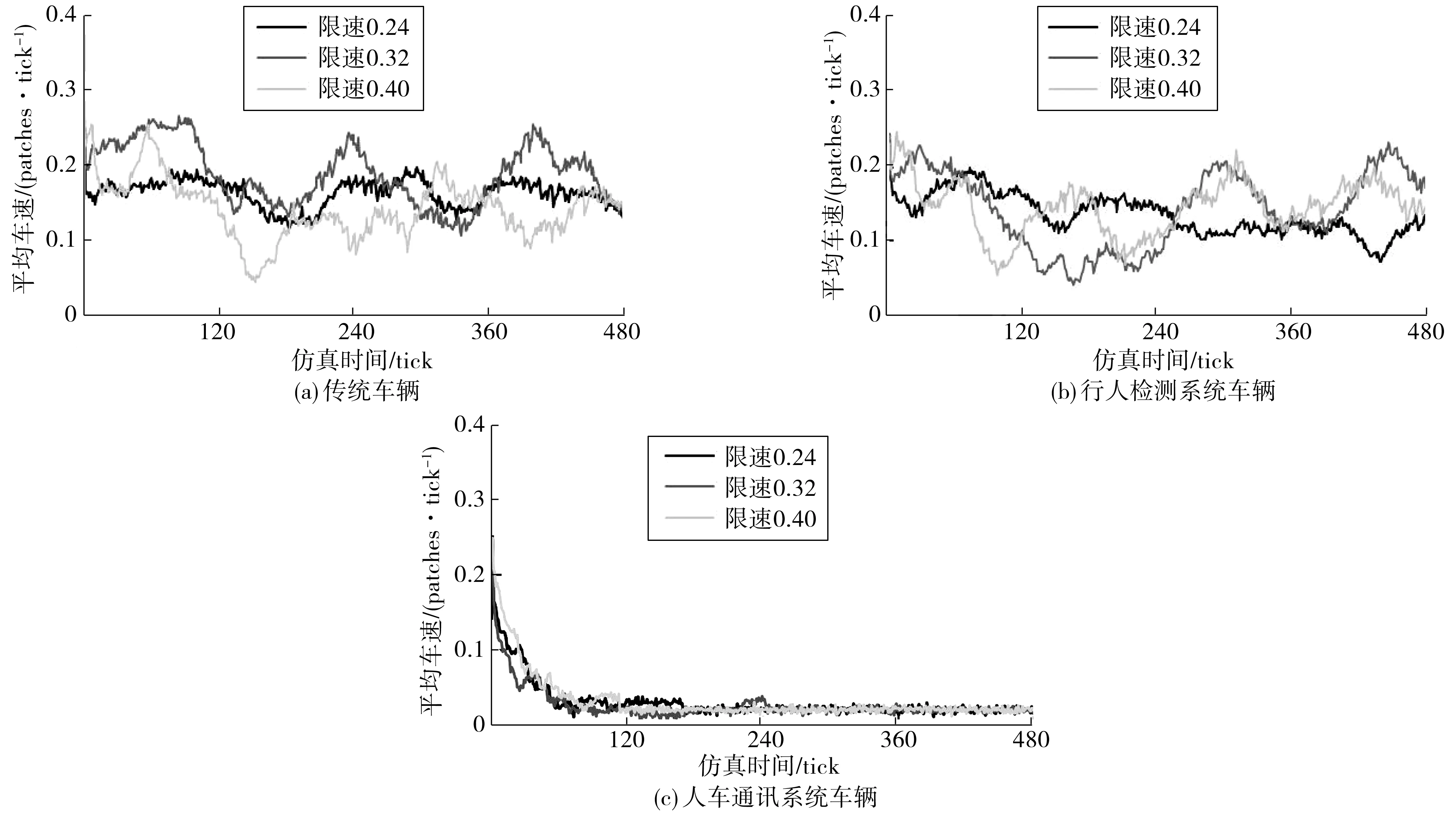
圖2 不同類型車輛在不同限速值下的平均車速波動狀態
3種系統車輛在不同車流量下平均車速時間序列值,如圖3。傳統車輛和行人檢測系統車輛的平均速度在仿真時段內均有不同程度波動。對這2種類型車輛平均速度時間序列值進行組內方差分析。分析結果顯示,傳統車輛在低流量和中等流量(F=28.729, df=1,p=0.000)、低流量和高流量(F=2635.224, df=1,p=0.000)及中等流量和高流量(F=3145.128, df=1,p=0.000)下平均車速均有顯著差異;行人檢測系統車輛在低流量和中等流量(F=401.831, df=1,p=0.000)、低流量和高流量(F=4794.155, df=1,p=0.000)及中等流量和高流量(F=500.295, df=1,p=0.000)下平均速度均有顯著差異(F為顯著性差異水平;df為自由度;p為檢驗水平,p值小于0.05時表示兩組存在顯著差異)。對上述2種類型車輛平均速度時間序列值組間方差分析。低流量(F=106.916, df=1,p=0.000)、中等流量(F=219.391, df=1,p=0.000)和高流量(F=124.000, df=1,p=0.000)下,其平均車速均有顯著差異。分析結果表明道路車流量高低對2種類型車輛平均速度波動有顯著影響,且在相同車流量下平均車速波動狀態也具有顯著差異。在仿真時段內,傳統車輛在低、中、高車流量下瞬時平均車速的平均值分別為0.174 5, 0.171 4, 0.065 5 patches·tick-1;行人檢測系統車輛為0.195 8, 0.144 1, 0.084 6 patches·tick-1。可見道路車流量越大,車流整體速度越小。人車通訊系統車輛在低、中、高流量下分別在第161、80和36 tick開始呈現穩定狀態。可以推斷,在一定范圍內車流量越大,人車通訊系統車輛越早趨于穩定。
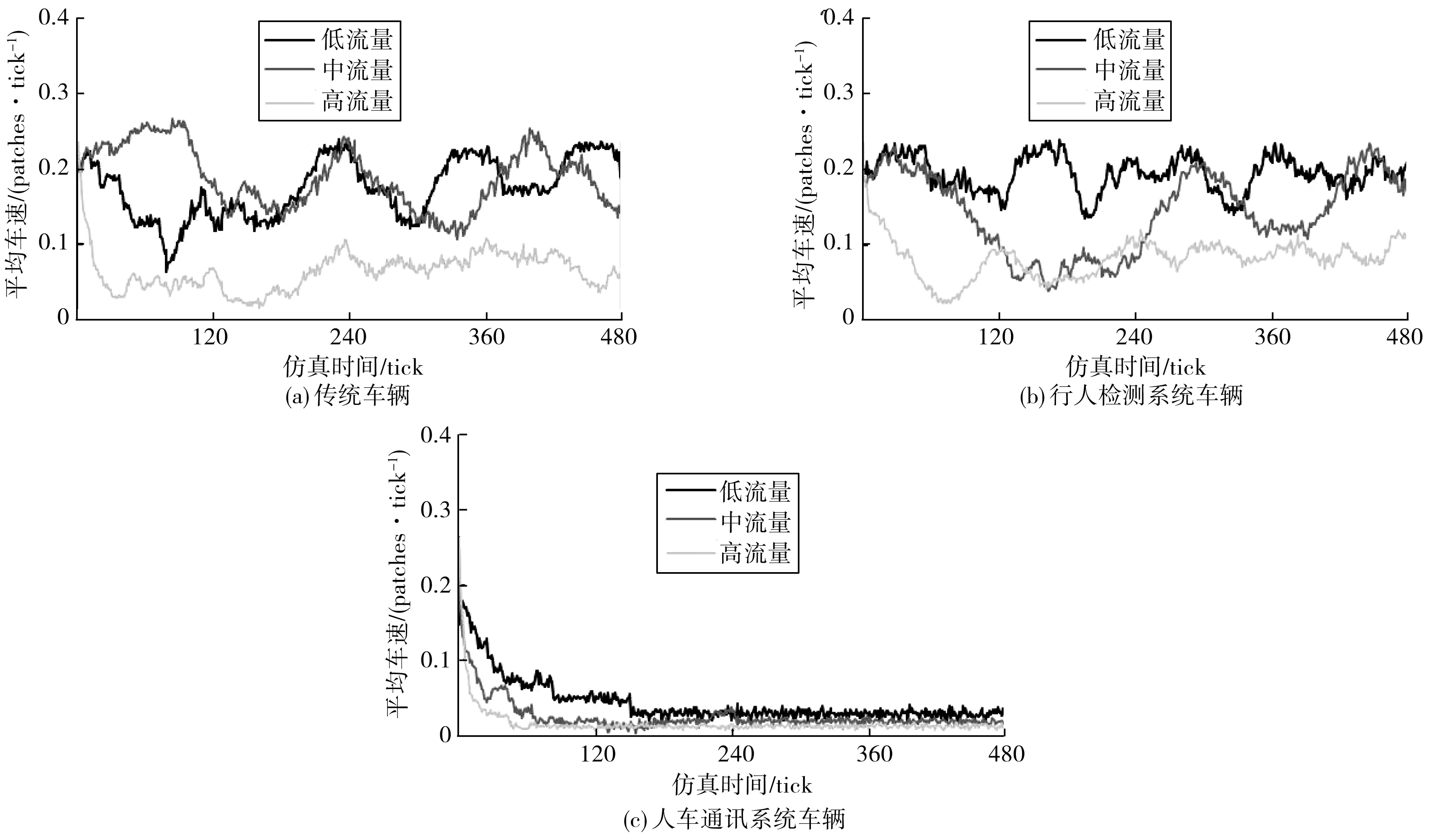
圖3 不同類型車輛在不同車流量下的平均車速波動狀態
3種類型系統車輛在不同行人規模下平均車速的時間序列值如圖4。從波動圖可以看出,隨著行人規模增大,傳統車輛和行人檢測系統車輛平均車速波動頻率逐漸減小。傳統車輛在小規模、中等規模和大規模行人狀態下的瞬時平均速度的平均值分別為0.210 9, 0.171 4, 0.081 0 patches·tick-1;行人檢測系統車輛分別為0.220 2, 0.144 1, 0.079 6 patches·tick-1。可以推斷,人行橫道處過街行人規模越大,車流整體速度越小。過街行人規模不同時,人車通訊系統車輛的平均車速分別在第62、80和82 tick開始趨于低速穩定狀態。可見,不同行人規模下,人車通訊系統車輛運行狀態差異并不明顯。
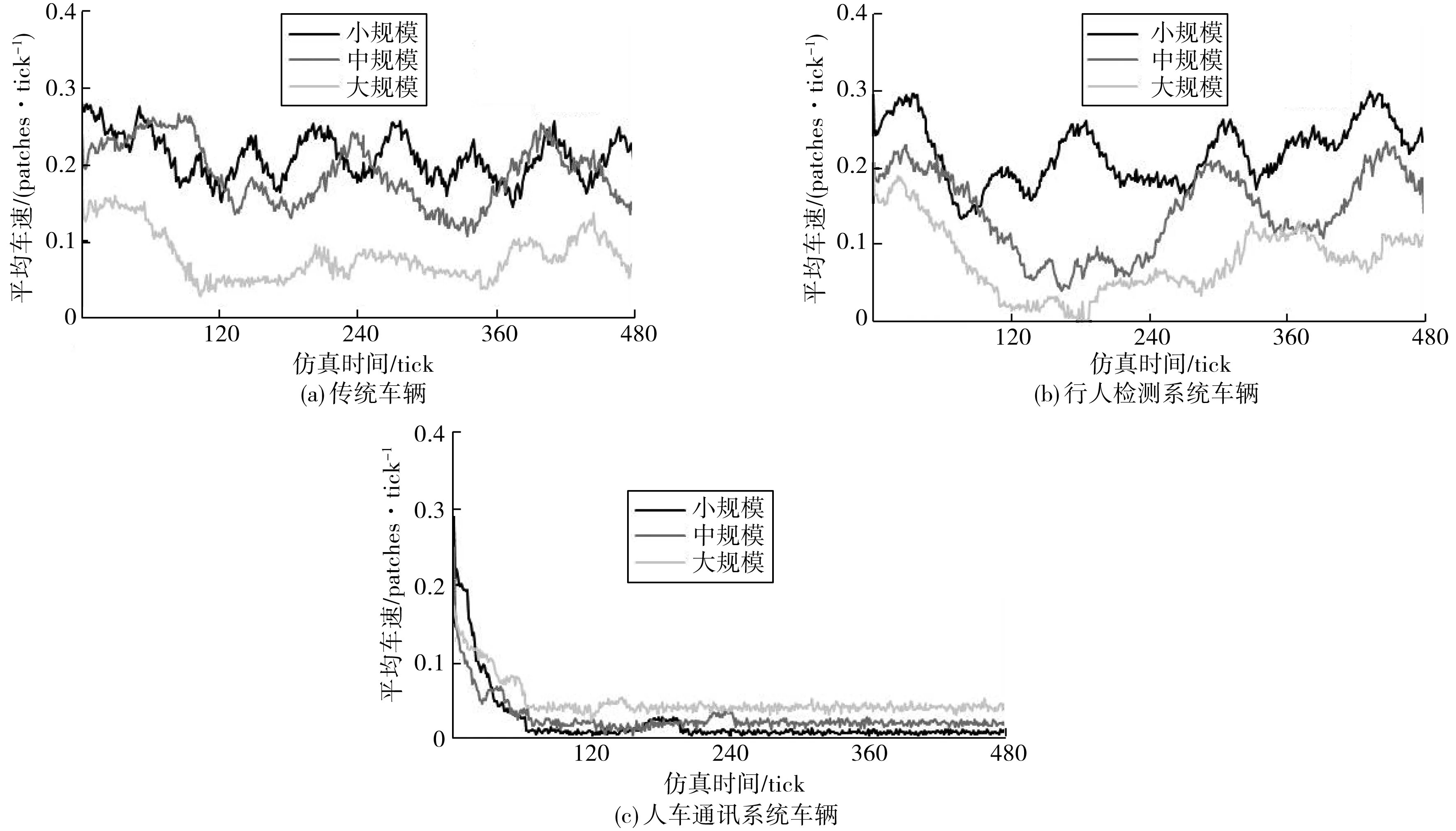
圖4 不同類型車輛在不同行人規模下的平均車速波動狀態
2.2 等待時間與行人速度分布
提取車輛平均等待時間和行人平均等待時間的瞬時值,并將其由低到高排列,分別取第80%位值作為該系統在特定行駛條件下的車輛和行人等待時間值,并經過多次仿真計算該值的平均值。
3種類型車輛在不同道路限速值、不同車流量和不同行人規模下運行得到的車輛等待時間和行人等待時間見表1。從不同類型車輛來看,車流量增大使得傳統車輛等待時間有較為明顯的增長;行人規模增大時,車輛等待時間的增長更為顯著,在大規模下達到了小規模時的42.35倍。隨著行人規模增大,行人檢測系統車輛等待時間也隨之增加,而在道路限速值和車流量不同時無明顯變化。在不同行駛條件下,人車通訊系統車輛等待時間在350 ticks左右浮動,值得注意的是,相比于其他行駛狀態,在車流量較小時,其等待時間大大增加。從相同行駛條件來看,人車通訊系統車輛等待時間遠超于其他2種類型車輛;行人檢測系統車輛的等待時間比傳統車輛更長,只有在車流量較高和行人規模較大時才短于傳統車輛等待時間。
從表1可以看出,行人檢測系統車輛行駛環境下,行人等待時間相較于傳統車輛行駛時更長,但在車流量較大時卻相反;與車輛等待時間不同的是,人車通訊系統車輛行駛時的行人等待時間遠低于其他2種類型車輛行駛時的情況。從不同類型車輛來看,傳統車輛行駛時,行人等待時間隨道路限速值增大而縮短,卻隨車流量和行人規模增大而延長。行人檢測系統車輛行駛時,行人等待時間隨道路限速值增大而縮短,隨車流量增大而先延長后縮短;行人規模變化對其無明顯影響,其值保持在1 tick左右。人車通訊系統車輛行駛時,行人等待時間在不同條件下均趨近于0或等于0。
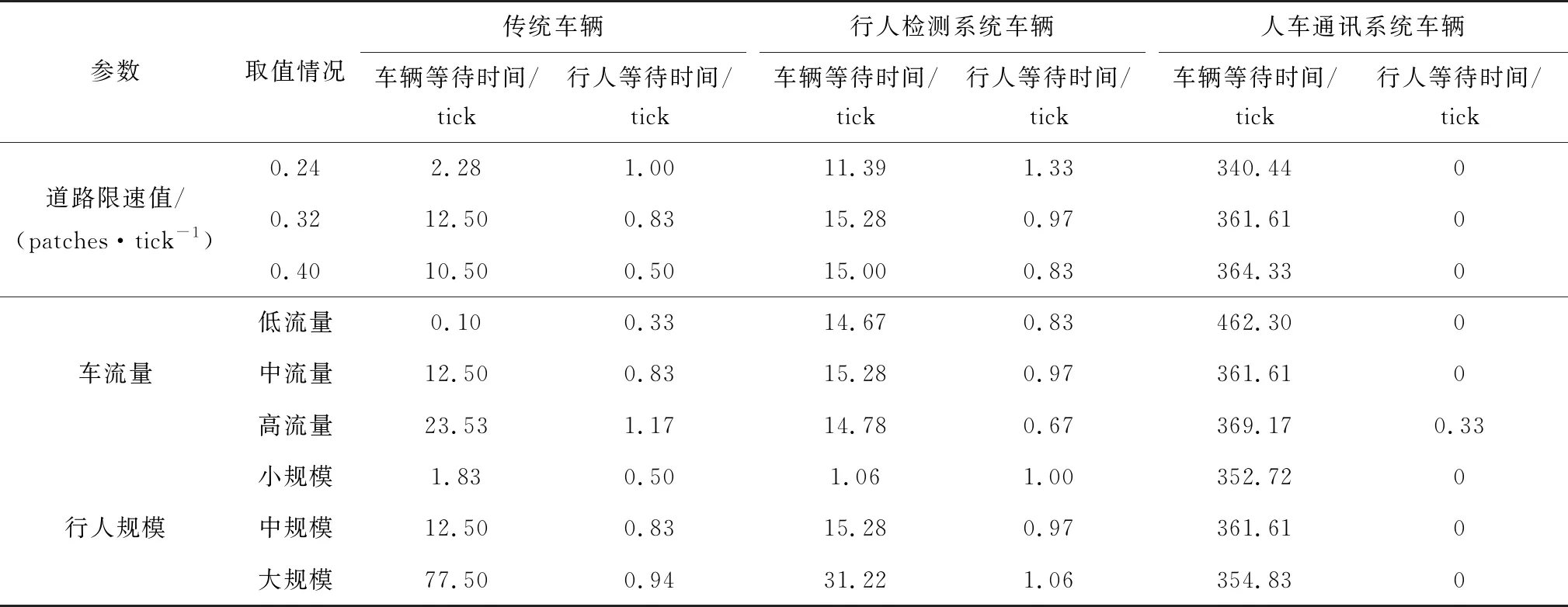
表1 不同道路限速值、不同車流量和不同行人規模下3類車輛等待時間
將3種車輛分別放置在不同道路條件下運行,觀察軟件輸出行人速度瞬時最大、最小和平均值隨時間的變化情況,發現行人速度的時間序列分布并不會隨道路限速值和車流量變化而產生明顯變化;但當行人規模增大時,行人速度時間序列值波動范圍逐漸縮小,行人流更加穩定。3種類型車輛在相同條件下運行時,行人瞬時平均速度的時間序列分布如圖5。觀察圖5可知,傳統車輛運行時行人速度波動最為明顯,行人檢測系統車輛次之。人車通訊系統車輛運行時,行人速度在0.03~0.12 patches·tick-1之間波動,且散點在0.06~0.10 patches·tick-1范圍內分布較為密集。計算發現,傳統車輛運行時的行瞬時平均速度的平均值為0.066 5 patches·tick-1,行人檢測系統車輛為0.069 4 patches·tick-1,人車通訊系統車輛為0.076 1 patches·tick-1,由此認為,人車通訊系統車輛運行時的行人過街效率最高,其次是行人檢測系統車輛,傳統車輛運行時最低。
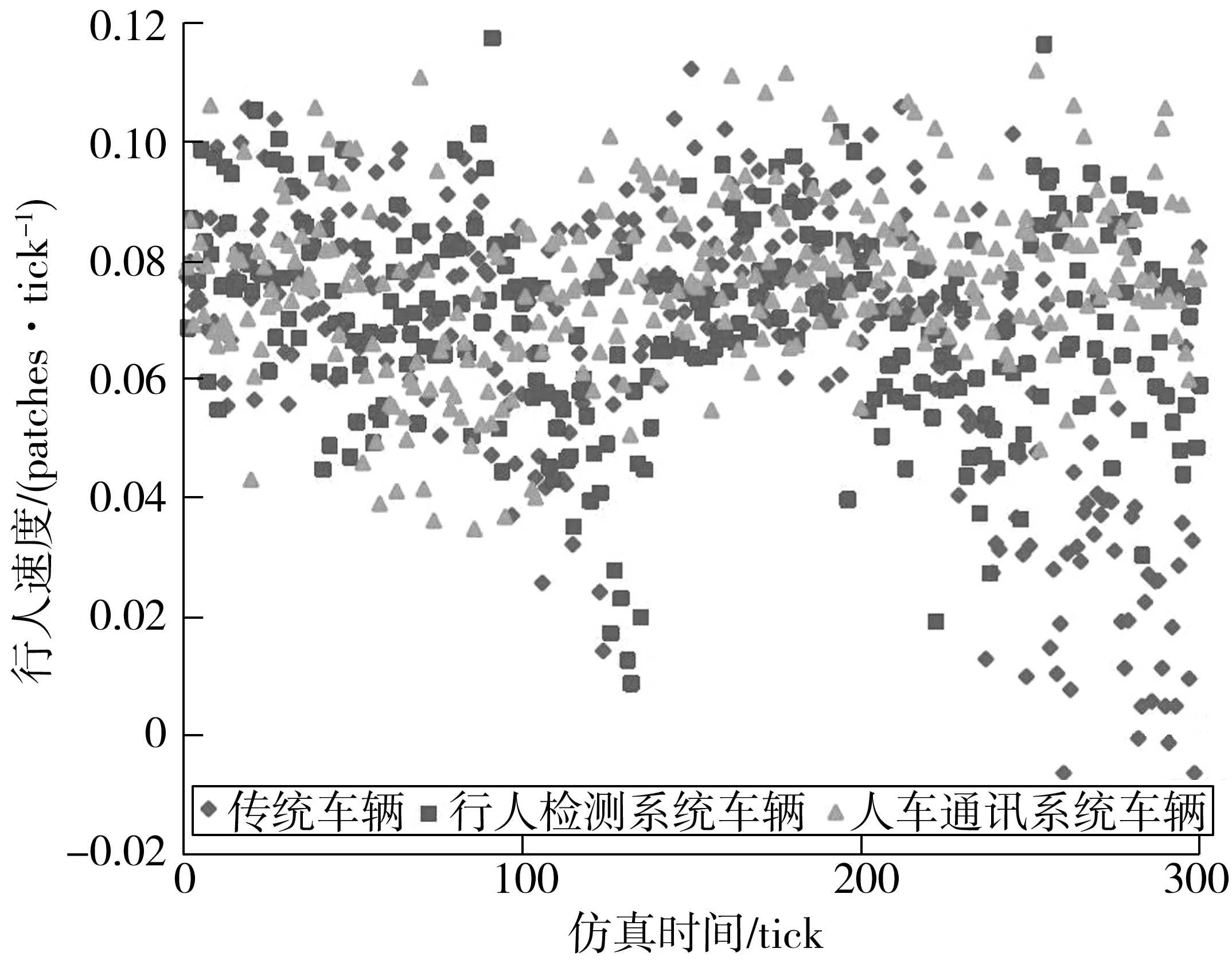
圖5 不同類型車輛在相同條件下運行時的行人速度分布
3 模擬結果分析討論
行人和車輛通過無信號燈控制人行橫道處的運行過程往往是一個人機互相干擾過程。隨著輔助駕駛系統和自動駕駛技術發展升級,過街行人安全也許能夠得到一定改善[17-23],當然,安全性也確實是其他性能的首要條件和基礎,但先進技術除了能夠達到對行人的保護作用外,在其他方面是否能夠有良好表現,需要進一步驗證。
3.1 交通流穩定性
在仿真中改變道路限速值,車輛智能體行駛速度也相應改變。傳統車輛和行人檢測系統車輛瞬時平均車速均處于波動狀態,并且道路限速值越大,平均車速的波動越大。道路限速值的高低一定程度上體現了車速大小,車速較大時,車輛為避讓行人而產生的加減速幅度也隨之較大。在限速值相同時,行人檢測系統車輛速度波動比傳統車輛更大,也就是說,傳統車輛車流更穩定,這可能是因為行人檢測系統對目標的檢測范圍較大,導致車輛過早開始減速,留給行人過街的時間足夠充足甚至過長,引起后續車輛減速排隊。人車通訊系統車輛平均速度在持續下降一段時間后逐步趨于穩定,限速值越大,車輛智能體行駛速度越大,需要越長時間減速,平均車速越晚達到穩定狀態,然而這種穩定狀態是異常的,很難恢復至原有狀態。這是因為人車通訊系統在接收到行人過街信息后盡可能讓出路權,讓行人順利過街,當行人之間未出現可通過間隙時,車輛則一直停車等待,以致產生擁堵。
道路車流量高低對傳統車輛和行人檢測系統車輛平均車速波動具有顯著影響,車流量越大,車速波動越小。這是因為車流量較高,車流整體速度較低,交通流不易受穿越行人影響。2種車輛在相同車流量下平均車速的時間序列值具有顯著差異,但從長時間運行狀態看,車流狀態并沒有很大區別,并不能區分孰優孰劣。另外,車輛智能體運動具有自主性,且仿真實驗起始時的車流狀態具有隨機性,由此引起的顯著差異性也是一方面原因。在一定范圍內車流量越大,人車通訊系統車輛越早趨于穩定狀態,這同樣可以解釋為交通流量大,整體車流速度小,減速避讓行人所需時間短。
行人規模反映路段行人流量的大小。隨著行人規模增大,傳統車輛和行人檢測系統車輛的平均車速波動頻率逐漸減小。這是因為當行人規模較小時,車輛為避讓行人而采取的加速、減速操作較為頻繁;反之,人行橫道處過街行人密集,行人頻繁到達人行橫道處,車輛沒有足夠時間加速到最大速度。人行橫道處過街行人規模越大,停車或低速排隊車輛越多,車流整體速度越小,交通流處于低速狀態,車流通行能力降低。當行人規模相同時,從車流長時間運行狀態來看,2種類型車輛平均速度波動狀態并沒有明顯區別,只是在規模較大時,傳統車輛整體車流速度略高于行人檢測系統車輛。這可能是因為2者避撞模式相似,均需經歷感知、判斷、決策和操作過程,而行人檢測系統相對于駕駛人來說對目標行人檢測能力更強,能夠更早采取減速操作避讓行人,當排隊車輛較多時,整體車流速度自然也會變小。人車通訊系統車輛接收到行人過街信息后即及時避讓行人,因此在不同行人規模下運行狀態差異并不明顯。結合之前的分析來看,人車通訊系統車輛雖然在各種道路條件下都能保持穩定車流,但其對行人的讓行使得車流無法正常運行,因此有理由認為人車通訊系統也許并不是先進駕駛系統的最佳選擇。
3.2 通行效率
車輛通行效率是城市路網健康發展的重要組成部分。一方面車輛速度能夠反映通行效率,另一方面車輛交通流受其他道路使用者干擾時的等待時間也能夠反映交通流運行效率。道路限速值、車流量和行人規模變化,均會引起傳統車輛等待時間變化。車流量較大時,車輛等待時間明顯增長,行人規模較大時,這種增長更為顯著。這是因為交通流量大,車間距離較小,整體車速較低,當與行人存在沖突風險的車輛減速停車時,后續跟馳車輛在較短時間內也相繼減速停車。群體行人過街時,所需過街時間比單個行人過街多得多,且群體行人過街速度通常低于單個行人過街速度。與傳統車輛相同的是,隨著行人規模增大,行人檢測系統車輛等待時間隨之出現增加趨勢。人車通訊系統車輛在各種道路條件下等待時間沒有明顯差距,唯一不同的是,在車流量較小時,其等待時間反而高于其他情況。將這個發現解釋為車流量小時車間距離大,行人認為的可通過間隙多,因此路邊行人直接過街而不是在路邊等待的可能性更大,這使得行人過街狀態離散,行人檢測系統車輛能夠較早識別到正在過街的行人,需頻繁減速停車,反而導致了車輛通行效率降低。在大多數條件下,傳統車輛等待時間比行人檢測系統短,而在較高車流量和較大行人規模下前者才長于后者。而人車通訊系統車輛等待時間遠遠超過了其他2種類型車輛。推斷原因是行人檢測系統檢測目標行人的靈敏性以及人車通訊系統接收信息的快捷性使得車流過早開始減速,停車時距離人行橫道還有一定距離,當后續行人陸續到達時,車輛沒有足夠時間加速通過只能繼續停車等待。這說明行人檢測系統和人車通訊系統在通行效率方面的表現并不優于傳統車輛,先進駕駛輔助系統的使用有可能會加劇交通擁堵,尤其是人車通訊系統。因此,若未來將其大量投放市場,決策者們則需要考慮行人流量較大時的車輛擁堵問題。
在實際中,過街行人在路邊等待時通常存在等待忍受時間,等待時間過長不僅會影響人流通行效率,導致路邊聚集行人過多而擁擠,還會使其產生焦慮心理,影響通行體驗。當傳統車輛或行人檢測系統車輛行駛時,行人等待時間隨車流量和行人規模增大而延長。空間需要在過街過程中體現為行人和機動車密度大小,也就是行人規模和車流量大小。人的自然屬性驅使行人尋找空間滿足其需要,空間越大舒適度越高。若周圍環境擁擠,例如在路沿石等待過街或隨大群行人一同過街時,不斷有行人出現在身旁,可利用空間不斷縮小,行人會自行調整與其他行人之間的距離。也就是說,車流量小時,人車間距大于行人認為的可通過間隙,因而行人直接過街,等待時間短,通行效率高;行人規模大時,路邊和人行橫道上易產生擁擠現象,從而使得行人群體過街速度小,有時需等待才能尋找到合適的行走空間,通行效率低。當行人檢測系統車輛行駛時,行人等待時間會隨車流量增高而先延長后縮短,這可以理解為車流量足夠大時,車速緩慢,足以讓行人尋找間隙順利過街,從而縮短等待時間。當人車通訊系統車輛行駛時,行人幾乎無需等待即可過街。這是因為車輛在接收到行人過街信息的情況下將通行權讓給行人,保證行人通行效率。多數情況下,行人等待時間在行人檢測系統車輛運行時比傳統車輛運行時稍長,僅在車流量較大時后者超過了前者;而人車通訊系統車輛運行時,行人等待時間遠遠低于其他2種類型車輛運行時的情況。這說明了人車通訊系統對行人通行效率有很大改善作用,而行人檢測系統在這方面的表現并不好。
從行人速度看,人車通訊系統車輛運行時的行人過街效率最高,其次是行人檢測系統車輛,傳統車輛運行時最低,但這個結論僅來源于傳統車輛和行人檢測系統車輛運行時行人低速時刻較多。但是這與上面關于行人等待時間的結論基本符合。在實際中,人車通訊系統車輛由于能夠很早接收到行人過街需求信息,能夠及時避讓行人,保證行人通行效率;而行人也能夠知曉車輛運動狀態,無需停下觀察即可過街。當傳統車輛或行人檢測系統車輛運行時,行人由于難以判斷車輛行駛狀態而需要停在路邊觀察后再過街,因此存在的低速時刻較多。
3.3 模擬局限性
試驗不可避免地存在一些仿真失真的情況。例如,討論車輛等待時間和行人等待時間時,忽略了駕駛人和行人的忍耐極限,這就是人與機器的區別。對于需要駕駛人手動操縱的傳統車輛來說,其運動受到駕駛人情緒、性格及天氣環境等不確定因素多方面影響,例如,駕駛人頻繁加減速會造成其情緒煩躁,無形之中降低安全性。雖然運用車輛智能體來表征車輛在一定速度范圍內的隨機運動,但仍然不能保證模擬出其與自動駕駛系統運行模式的區別。行人也同樣如此,與微觀研究相比,并沒有考慮冒險型行人和保守型行人不同過街特性,而是直接考慮了行人群體過街特點以及不同年齡范圍對應的過街速度,但這也許更適合于所做的宏觀研究。
4 結 語
筆者探索了傳統車輛(即駕駛人)、行人檢測系統以及人車通訊系統分別在各自感知能力下在長時間內對城市無信號人行橫道路段交通流運行的影響。研究結果表明:雖然行人主動安全系統的發展越來越能夠改善行人安全性,但這些先進系統在交通流運行質量和通行效率方面的性能并不是越來越好的,例如,行人檢測系統車輛也許并不利于交通流的穩定;人車通訊系統的普及也許會嚴重影響車輛通行效率,加劇城市擁堵。決策者應認識到這一點,并采取措施規避這些缺陷。
很多輔助駕駛系統試圖通過目標檢測功能和圖像處理技術來達到行人檢測和避撞目的。而從仿真試驗結果可以看出,當道路運行狀況不同時,不同系統的各個性能指標無法在同一條件下取得最優值,而需要從道路管理功能方面結合路段交通流的實際運行情況,綜合評價不同系統的性能。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
