柔性直流控制系統鏈路延時測量方法研究
2021-03-13 09:13:04
浙江電力 2021年2期
關鍵詞:信號
(南京南瑞繼保電氣有限公司,南京 211102)
0 引言
基于模塊化多電平換流器拓撲結構的柔性直流輸電系統具有控制方式多樣、功率調節靈活等技術優勢。柔性直流輸電系統在大規模新能源接入、交流系統互聯、孤島供電以及城市配電網等方面已得到廣泛應用。
我國已陸續投運了舟山±200 kV 五端柔性直流工程、廈門±320 kV 柔性直流工程、魯西±350 kV 背靠背直流異步聯網工程、渝鄂±420 kV 背靠背柔性直流工程[1-6]。近年來正在建設張北±500 kV 柔性直流電網工程和烏東德±800 kV 混合多端直流輸電工程,高電壓、大容量柔性直流控制系統在控制策略、保護配置以及安全穩定運行等方面有著更高的技術要求[7-10]。
柔性直流工程的功率振蕩事件廣受關注,文獻[11]介紹了國內外多次柔性直流輸電系統典型的功率振蕩事件,并對其相關振蕩的研究難點和未來方向予以展望。
柔性直流工程的功率振蕩事件和控制系統的鏈路延時之間有高度相關性,減少鏈路延時可以改善柔性直流輸電系統的阻抗特性。文獻[12]以魯西背靠背異步聯網工程為例,針對中高頻諧振問題建立柔性直流輸電系統的精確阻抗模型,并分析其阻抗特性,提出了通過硬件優化升級,減小系統延時改善系統阻抗特性。文獻[13]分析了柔性直流與交流系統高頻諧振機理,高頻振蕩對控制參數變化不敏感,與控制鏈路延時、前饋策略相關性高。柔性直流輸出阻抗與控制鏈路延時高度相關,工程設計應嚴格控制各控制環節延時時間。
減少控制系統的鏈路延時對系統動態響應和故障穿越同樣具有重要意義。文獻[14]提出了大幅增加控制系統鏈路延時會降低系統動態響應特性和交流故障穿越能力的觀點,基于魯西背靠背異步聯網工程仿真試驗分析了相位校正方法對系統穩定性的影響,通過相位校正補償可有效改善系統動態響應特性。文獻[15]提出了柔性直流閥控系統性能的提升方法,通過減小控制器的控制周期可以減少閥控系統控制和保護的整體延時,有利于直流雙極短路等嚴重故障的快速保護和交流側故障的穿越。
控制系統的鏈路延時測量已成為柔性直流工程實施的重要測試項目。文獻[16]提出了一種閥控系統延時測試方法,基于烏東德工程柳北換流站的閥控系統分析了延時的組成,在模塊控制板上通過調試軟件抓取測量信號,測試方法較復雜并且依賴于特定的硬件板卡。
綜上所述,優化控制系統的鏈路延時對直流輸電系統的阻抗特性、系統動態響應和故障穿越有著重要意義。而控制系統的鏈路延時準確測量方法將為優化鏈路延時提供重要參考依據。
本文基于柔性直流仿真控制系統分析了控制系統下行鏈路延時環節,明確了控制系統下行鏈路延時定義,選取模擬量信號的過零點作為特征信號,將控制系統作為整體被測對象接入第三方裝置,提出一種準確客觀、操作方便并且對控制系統無擾的下行鏈路延時測量方法。
1 控制系統下行鏈路環節分析
柔性直流控制系統由極控系統和閥控系統兩部分組成,主要包括以下控制設備:IO(輸入-輸出采樣)裝置、PCP(極控制)裝置、VCP(閥控制保護)裝置、VBC(閥基控制)裝置和子模塊的SMC板卡。
PCP 裝置主要負責極功率控制、直流電壓控制、調制波計算和順控聯鎖等功能。IO 裝置主要負責對系統的模擬量電壓和電流信號進行采樣轉換。PCP 裝置的PLL 鎖相等控制算法依賴于IO裝置的采樣數據。VCP 裝置主要負責控制信號分發、主動充電、環流抑制和子模塊投入個數計算等功能。VBC 裝置主要負責子模塊命令計算和子模塊故障處理等功能。
柔性直流控制系統的下行鏈路是整個控制系統的關鍵鏈路,而上行鏈路主要用于系統狀態監視信號和緩變模擬量信號(比如子模塊平均電壓)上送,對控制性能影響較小[17]。如圖1 所示,整個柔性直流控制系統的下行鏈路環節如下:
(1)IO 裝置交流頭插件接入經一次設備TV/TA 過來的模擬量信號,周期觸發AD 采樣并轉換為離散的數字量采樣碼值。
(2)PCP 裝置接收采樣碼值,經控制策略處理計算生成調制波。
(3)VCP 裝置接收調制波,經轉換計算生成六個橋臂的子模塊投入個數。
(4)VBC 裝置接收對應橋臂的子模塊投入個數,計算生成每個子模塊的IGBT(絕緣柵雙極型晶體管)命令。
(5)子模塊的SMC 板卡接收IGBT 命令,驅動子模塊投入或切除。
柔性直流控制系統的下行鏈路是整個控制系統的關鍵鏈路。
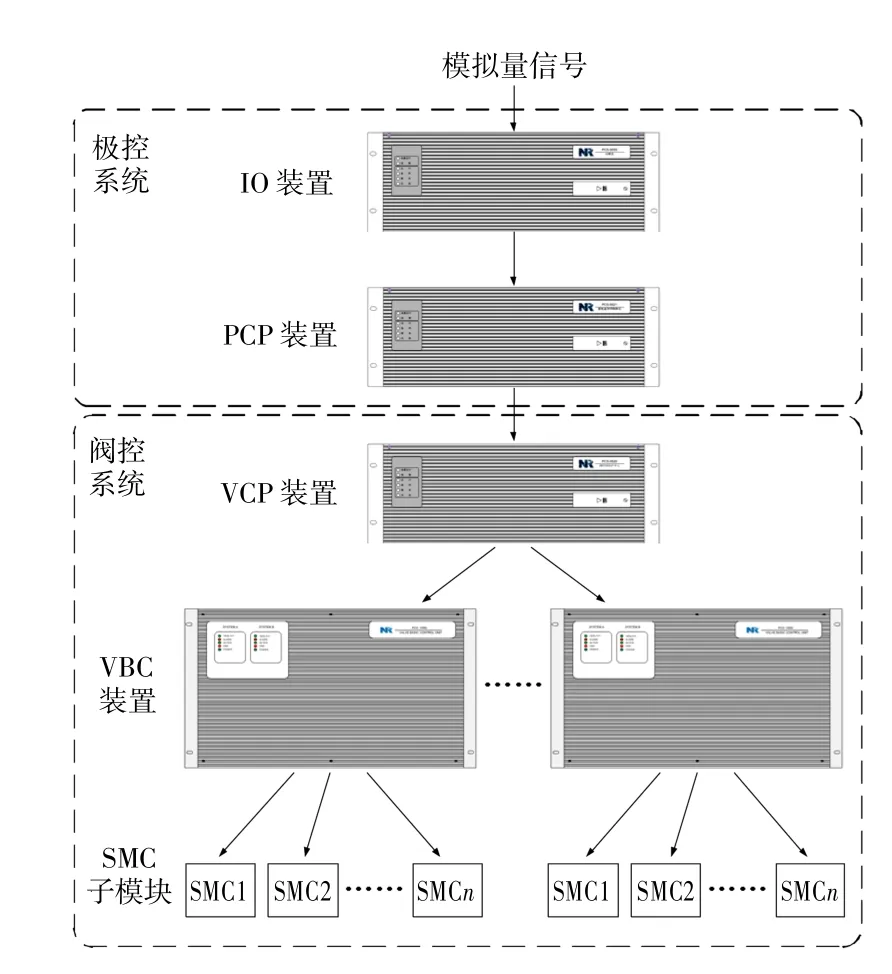
圖1 柔性直流控制系統下行鏈路環節
2 控制系統下行鏈路延時定義
2.1 下行鏈路延時
PCP 至VCP 裝置的光纖通信傳輸環節是極控系統和閥控系統的接口點,這個環節鏈路耗時屬于極控系統的下行鏈路延時。
極控系統的下行鏈路延時起點和終點分別為IO 裝置接入模擬量信號和PCP 裝置發送完光纖通信數據幀。
閥控系統的下行鏈路延時起點和終點分別為VCP 裝置收到完整光纖通信數據幀和SMC 板卡的IGBT 驅動信號。
整個控制系統的下行鏈路延時等于上述極控系統和閥控系統的下行鏈路延時之和。
2.2 控制系統同步說明
極控系統的PCP 裝置是整個控制系統的核心設備,其他裝置均具有同步功能,整個控制系統是同步系統。
以VCP 裝置跟隨PCP 裝置同步為例,如圖2所示,發送主機通過設置合適的光纖通信定時發送時間,保證光纖數據幀的發送間隔穩定。
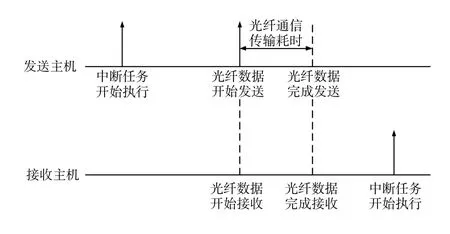
圖2 光纖通信定時發送和同步
如圖2 所示,接收主機中斷任務起始時刻始終跟隨發送主機的光纖數據發送時刻,VCP 裝置通過微調本地中斷快慢,實現中斷任務始終跟隨PCP 裝置,在接收完光纖數據幀后緊接著進入中斷任務,實現裝置之間保持同步功能。
發送主機采用定時發送方式,接收主機采用調同步功能,實現整個控制系統是同步系統,即從模擬量采樣開始到子模塊IGBT 動作的鏈路延時是穩定數據。
3 下行鏈路延時測量準備
3.1 模擬量過零點檢測
實際系統的原始模擬量信號存在工頻和高頻分量,IO 裝置通過設置合適濾波參數和采樣周期可以采集到工頻和大部分高頻模擬量信號。控制系統的鏈路延時是穩定數據,為方便測量觀察,選取原始模擬量信號的過零點作為特征信號,PCP 裝置接收采樣碼值并檢測過零點信號。以上升沿過零點為例,如圖3 所示,在采樣碼值由負變正過程中,只有落在檢測范圍(比如-1~1),才認為檢測到上升沿過零點信號。設置合理較小的檢測范圍以提高過零點檢測精度,在測量過程中通過示波器觸發方式獲取過零點相關信號。
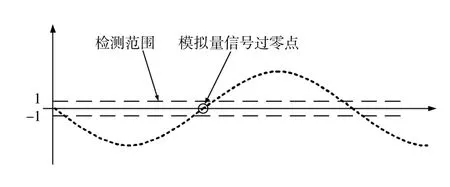
圖3 過零點檢測示意
3.2 延時測量程序
PCP,VCP 和VBC 裝置需要增加下行鏈路延時測量相關應用程序,通過置數開啟下行鏈路延時測量功能。
如圖4 所示,PCP 裝置檢測上升沿過零點信號,當判斷出過零點信號后輸出1 ms 展寬的方波調制波信號。VCP 裝置根據方波調制信號生成子模塊投入個數。VBC 裝置收到子模塊投入個數產生每個子模塊命令信號。
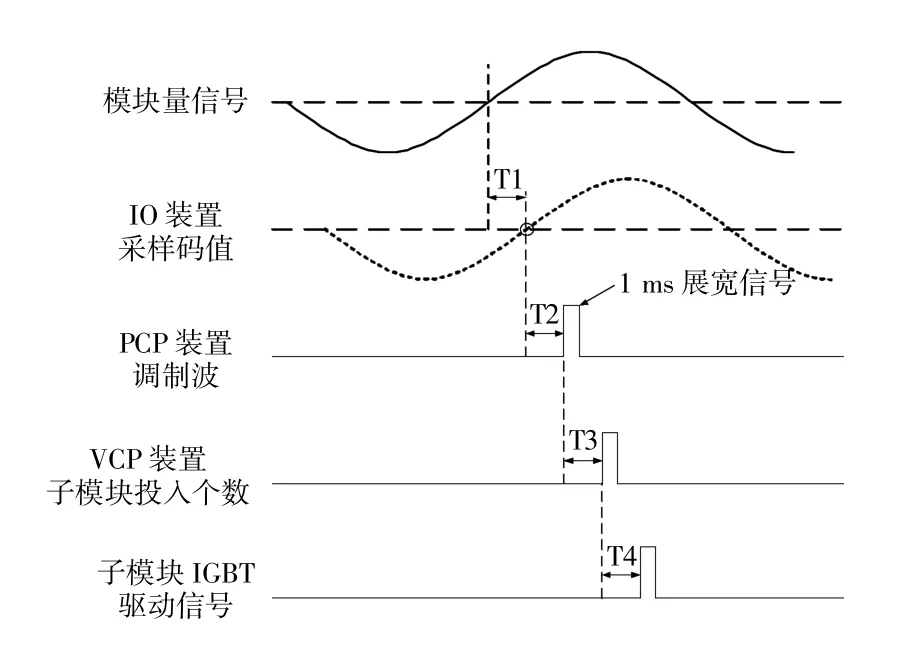
圖4 控制系統鏈路延時示意
整個控制系統的下行鏈路延時可分為T1—T4 時間,從模擬量信號開始,依次經過IO 裝置、PCP 裝置、VCP 裝置、VBC 裝置,最后到達子模塊IGBT。從PCP 裝置輸出信號到子模塊IGBT 驅動信號均為1 ms 展寬信號。
3.3 第三方裝置
下行鏈路延時測量需要實現客觀準確、操作方便并且對控制系統無干擾等目標。將控制系統作為整體被測對象,其輸入和輸出信號復制接入第三方裝置。
如圖5 所示,光纖數據幀可通過發送裝置復制發送或分光器接入第三方裝置。PCP 至VCP 裝置的光纖通信傳輸耗時作為極控系統下行鏈路延時的一部分,通信接口采用IEC 60044-8 協議,鏈路層符合1EC 60870-5-1 的FT3 格式,波特率為20 M,數據長度為16 個字節。
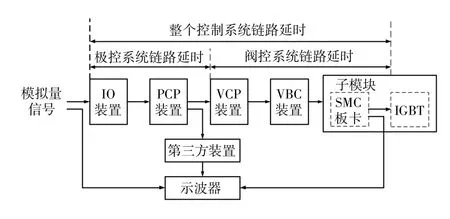
圖5 鏈路延時測量示意
第三方裝置通過FPGA 芯片(具有硬件實時特性)解析光纖數據幀并輸出測點電平信號。最后通過示波器觀察模擬量信號、第三方裝置測點信號以及SMC 板卡的IGBT 驅動信號,獲取控制系統的下行鏈路延時數據。
4 下行鏈路延時測量過程
基于柔性直流仿真控制系統測量控制系統的下行鏈路延時,測試過程只需要少量硬件設備,主要包括一臺模擬量輸出儀器、一臺示波器、一臺第三方裝置、一塊子模塊SMC 板卡。測量過程具體如下:
(1)在IO 裝置施加50 Hz 正弦波模擬量電壓(有效值57.74 V),經采樣轉換為碼值并發送至PCP 裝置。
(2)PCP 裝置檢測上升沿過零點信號,當判出過零點信號后輸出1 ms 展寬的方波調制波信號(高電平為1,低電平為0),發送至VCP裝置和第三方裝置。
(3)VCP 裝置根據方波調制波信號生成子模塊投入個數(高電平對應子模塊控制總個數,低電平對應子模塊個數為0)。
(4)VBC 裝置收到子模塊投入個數產生每個子模塊命令信號,SMC 板卡收到子模塊命令信號生成IGBT 驅動電平信號(高電平對應投入子模塊,低電平對應切除子模塊)。
(5)第三方裝置解析PCP 裝置發送的光纖通信數據幀并輸出測點電平信號。示波器采用上升沿通道觸發模式,如圖6 所示,通道1 是施加的模擬量信號(有效值57.74 V),通道2是第三方裝置解析PCP 裝置發送光纖數據幀的測點信號(0~5 V 電平信號),通道3 是子模塊SMC 板卡的IGBT 驅動電平信號(-15~15 V 電平信號)。
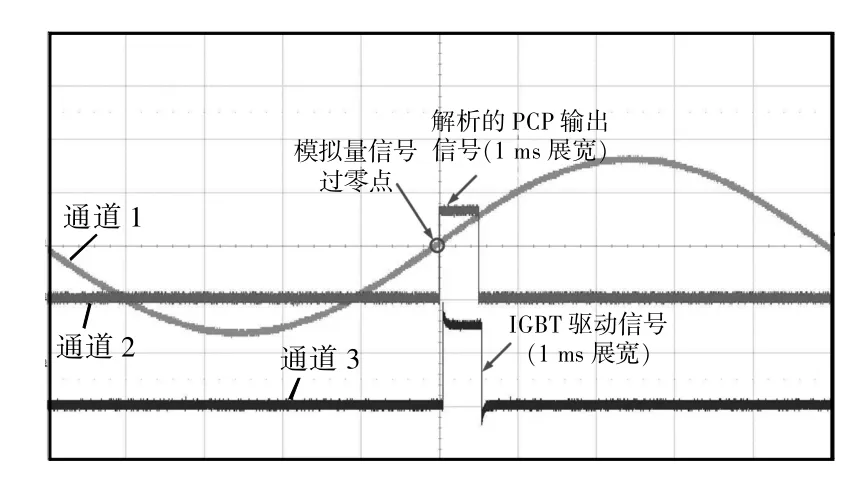
圖6 鏈路延時測量示波器通道波形
(6)調整放大示波器顯示并觀察測量結果,如圖7 所示,通道1 顯示穿越零電平線時刻對應模擬量信號過零點,通道2 過零時刻和通道2 上升沿時刻之差是極控系統下行鏈路延時。通道2 上升沿時刻和通道3 上升沿時刻之差是閥控系統下行鏈路延時。
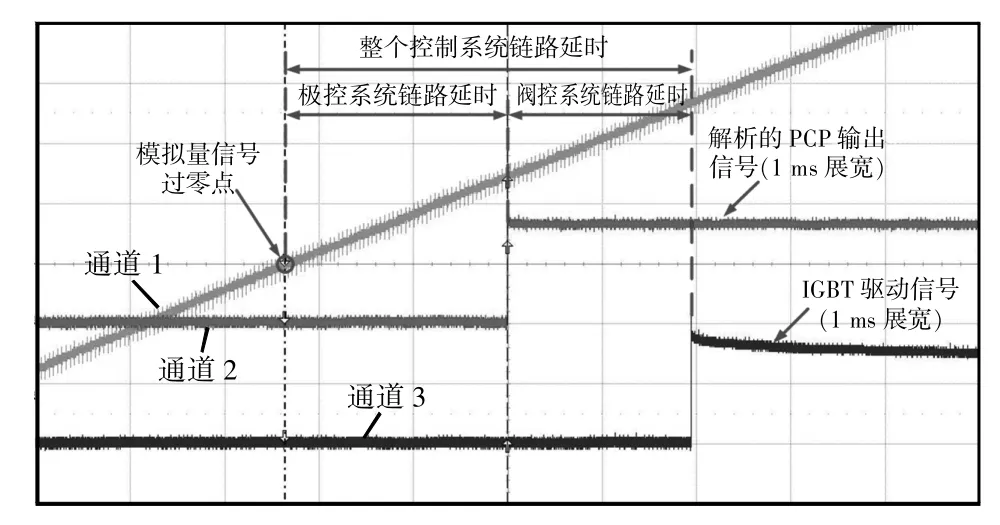
圖7 鏈路延時測量示波器波形
5 結語
本文分析了柔性直流控制系統的下行鏈路延時環節,明確了控制系統下行鏈路延時定義,選取模擬量信號的過零點作為特征信號,將控制系統作為整體被測對象接入第三方裝置,提出了一種準確客觀、操作方便并且對控制系統無擾的下行鏈路延時測量方法。該測量方法已在張北柔性直流電網工程和烏東德混合多端直流輸電工程上實施應用,為控制系統的性能評估以及改進提供參考依據,具有較好的工程應用價值。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06