三維激光移動掃描系統在地鐵盾構隧道中的應用研究
2021-03-08 02:16:32胡玉祥劉寶華張洪德范珊珊熊文輝孟慶年
城市勘測 2021年1期
胡玉祥,劉寶華,張洪德 ,范珊珊,熊文輝,孟慶年
(1.青島市勘察測繪研究院,山東 青島 266032; 2.青島市西海岸基礎地理信息中心有限公司,山東 青島 266000;3.青島市地下空間地理信息工程研究中心,山東 青島 266032)
1 引 言
地鐵投入使用后,隨著環境變換以及后期結構使用劣化,地鐵隧道不可避免出現各種病害,如何快速、準確、可靠地檢測各種病害,做出可行性評估,提前采取各種有力措施,保證地鐵線路的平穩運行成為地鐵運營階段的重點和難點。常規病害檢測的方法是借助全站儀、站式三維掃描儀等,通過人工巡視,確認并記錄位置,但傳統手段費時費力、成本高且數據表達不夠直觀。隨著三維激光掃描技術、數字影像技術、通信技術、計算機技術以及測繪技術的發展,短時間內快速獲取隧道的狀態成為可能,借助三維激光移動掃描系統,可以快速、高效、準確地獲得運營隧道的空間信息,通過后期的點云處理、影像配對、影像正射數字化,借助影像匹配算法可以準確識別裂縫、漏水以及管片錯臺等相關病害信息。移動軌道掃描車以人步行速度向前推進,借助慣導系統以及圖像獲取設備,全息、全面、快速獲取整個隧道相關信息,通過專業化后處理軟件處理,可實現軌面線、結構中心線及斷面的提取,收斂、橢圓度、旋轉、錯臺、接觸網導高分析,侵界檢測,里程配付等功能;根據點云反射率,生成隧道壁正射影像圖,可自動或人工識別滲水等病害信息并進行標注。
隧道結構病害對于地鐵安全運營至關重要,通過三維激光掃描技術,迅速獲取三維點云數據,可建立整條地鐵線路的病害數據庫。利用掃描生成的站臺及隧道點云數據,通過三維建模軟件,可以完成三維模型構建,通過采集車站及隧道紋理,完成三維模型的可視化展示。生成的模型可以用于展示、漫游,也可以作為保護區監測等數據可視化展示的基礎;建立的病害數據庫可以用作決策、預防、后期對比應用,建立整條線路的智慧信息化系統平臺,為線路運營安全預防及調度提供保障。
2 地鐵隧道全息數據采集及數據預處理
三維激光移動掃描技術是近幾年發展起來的一種新的綜合測量技術,它是集激光掃描技術、實時定位技術、姿態測量技術、通信技術、計算機技術為一體的檢測系統,在鐵路、地鐵結構與周邊環境檢測領域具有很好的應用前景,尤其適合于竣工后的地鐵隧道空間結構檢測。三維激光移動掃描系統采集與處理系統軟件是基于隧道內部復雜的環境,實現在隧道內移動快速采集激光掃描數據,并在后續的數據處理中實現直徑收斂和管片錯臺的形變數據解算,且可根據項目需求定制報表模板,一鍵自動生成直徑收斂、錯臺、滲漏病害等專題報表。
2.1 三維掃描基礎理論
三維激光掃描儀的主要構造是一臺高速精確的激光測距儀,配上一組可以引導激光并以均勻角速度掃描的反射棱鏡。地面三維掃描系統一般使用儀器自定義的坐標系統:坐標原點位于掃描儀中心,X軸在橫向掃描面內,Y軸在橫向掃描面內與X軸垂直,Z軸垂直于橫向掃描面組成左手坐標系,如圖1所示。
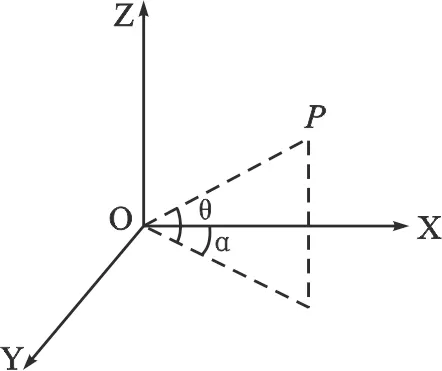
圖1 掃描坐標系
激光測距儀主動發射激光,同時接受由自然物表面反射的信號測算出原點O距激光掃描點的距離S;激光掃描系統通過內置伺服驅動馬達系統精確控制多面反射棱鏡的轉動,使脈沖激光束沿橫軸方向和縱軸方向快速掃描,測得每個脈沖激光的橫向掃描角度α和縱向掃描角度θ。由此,可計算出掃描激光點在被測物體上的三維坐標為[3]:
(1)
2.2 三維激光移動掃描系統組成
三維激光移動掃描系統能夠對隧道及周邊實現全覆蓋移動掃描,在露天或隧道內都可以正常使用。該系統有著獨一無二的安裝設計,在隧道維護與整修環節能夠縮短項目周期,并提供測繪級精度的三維點云。
移動隧道掃描系統(圖2)通過整合強大的非接觸式里程計,可以在沒有GNSS信號的地鐵隧道里精確定位。
通過整合三維激光掃描儀、里程計、軌距測量儀等多種傳感器,三維激光移動掃描系統可獲取高質量的三維點云數據及專業的軌道檢測維護成果,電動前進無須停留,軌檢效率高達 5.4 km/h。適用于軌道檢測、線路管理維護、竣工分析、限界測量、凈空測量、軌道探傷等多個領域。
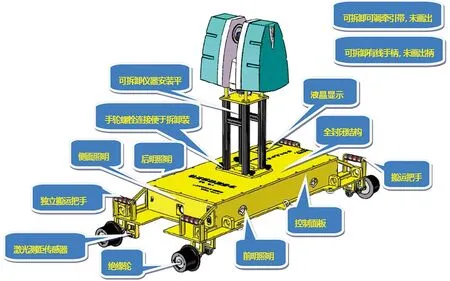
圖2 三維激光移動掃描系統組成
2.3 數據采集流程
三維激光移動掃描隧道全息數據采集工作主要包括作業前準備、現場作業以及作業結束整理等步驟(如圖3所示)。
使用配套的數據采集軟件,建立項目,設置相關的掃描參數:作業方式、作業順序、隧道類型以及其他相關信息。在作業過程中還需要采集軌距相關信息,用連接線將采集設備軌距傳感器接口與筆記本電腦或工業平板電腦進行連接,然后點擊現場作業下的軌距,選擇對應的COM端口和采集頻率后點擊連接軌距傳感器。連接成果后可以點擊開始進行測量,點擊結束完成測量。
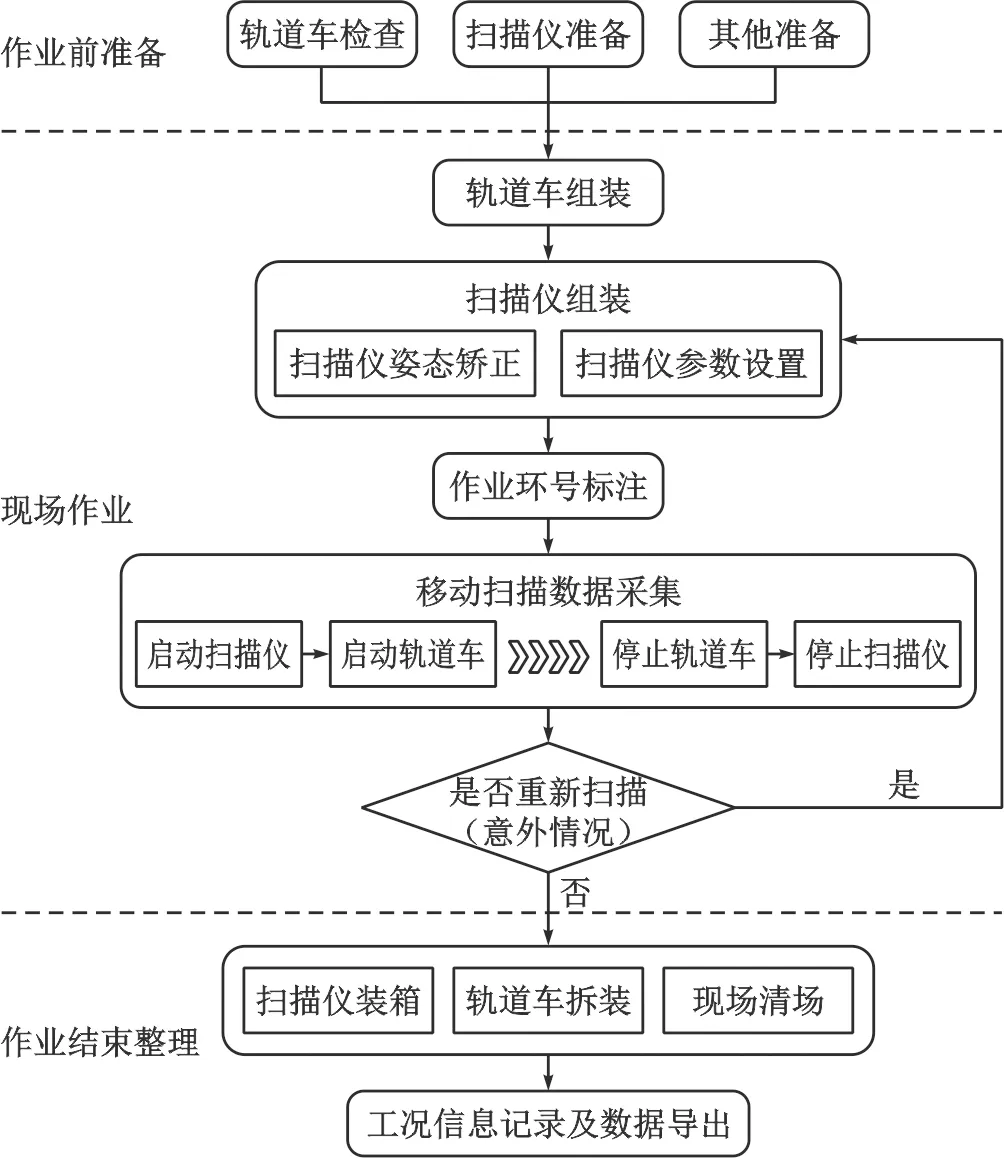
圖3 作業流程
2.4 數據處理
(1)參數設置
對于盾構隧道,每一環都是有固定的6片管片拼裝而成,只是順序有差異,對于環片錯臺量計算首先需要設置6片管片的空間相對角度關系,這個角度對于不同地區可能略有差異,但通常一個地方是固定的。另外還得設置環寬和直徑等相關信息,管片參數設置如圖4所示。

圖4 管片參數設置
(2)影像標記
導入掃描的點云數據后,首先進行點云預處理,將點云數據展開成正射影像,通過KP塊完成數據糾正,此過程就是逐環標記KP塊位置,為后續點云處理提供位置信息。如圖5所示標記框,對于環號默認從1開始,也可進行手動更改;設置好環寬和初始里程后,隨著環號的增加,里程依次增加。
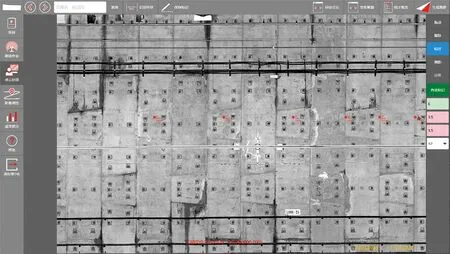
圖5 KP塊標記示意圖
(3)數據解算
經過上述過程后,下一步需要進行數據解算,解算需要設置參數:收斂測量、管片錯臺、過濾道床、隧道起止、軌道參數、儀器高度,錯臺閾值等(如圖6所示)。設置好相關參數后,一鍵處理即可得到相關數據,還支持報表導出、視頻漫游等功能。

圖6 參數設置示意圖
內業數據解算功能主要可以實現如下:
①隧道結構形變處理:可實現軌面線、結構中心線的提取;斷面提取;收斂、橢圓度、旋轉、錯臺、接觸網導高分析;侵界檢測;里程配付等功能。
②病害檢測系統:根據點云反射率,生成隧道壁正射影像圖,可自動或人工識別滲水等病害信息并進行標注。
3 三維激光移動掃描系統在地鐵隧道中的應用
三維激光移動掃描系統通過在軌道上運行獲取整個隧道正射影像及三維空間點云,通過后期的點云處理、影像配對、影像正射數字化,借助影像匹配算法可以準確識別裂縫、漏水以及管片錯臺等相關病害信息。同時可實現相關幾何尺寸的提取,進而得到相關的侵界分析情況。以青島市勘察測繪研究院中標的青島地鐵2號線運營監測項目,選取某個區間的三維激光移動掃描數據,進行相關的分析。
3.1 侵界分析
限界分析就是分析盾構區間環線斷面尺寸和設計尺寸的差異,如果實際尺寸和設計尺寸相差較大,就會造成后續軌道鋪設以及設備安裝等過程不能正常進行。經過移動掃描系統掃描后的數據,經過后期處理,對指定里程的點云進行切割、離散化處理,就可以得到對應里程的斷面尺寸,然后和設計斷面進行對比即可獲得該里程的限界分析結果,地鐵隧道限界尺寸示意圖和分析圖如圖7所示。
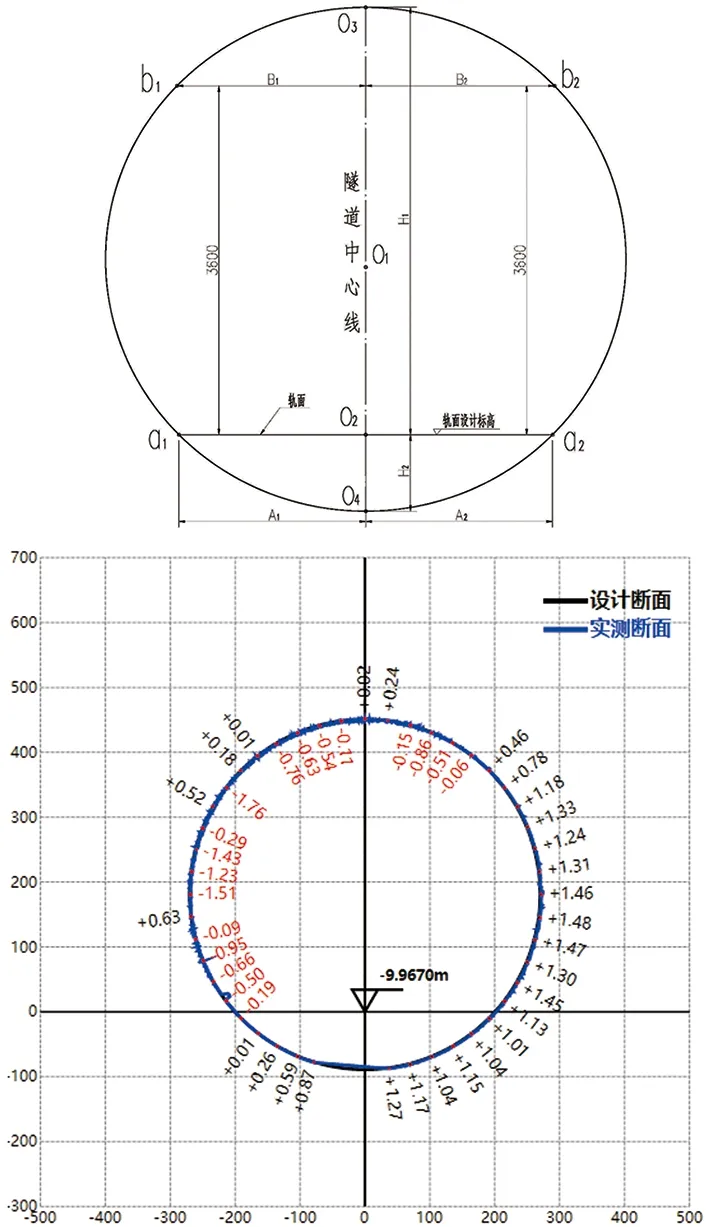
圖7 地鐵隧道限界尺寸示意圖和分析圖
3.2 錯臺分析
錯臺分析包括環與環之間的錯臺以及環之間管片與管片之間的錯位,如圖8、圖9所示,經過2.4中(1)的參數設置后,可以計算出指定里程的管片之間以及環與環之間的位移量。

圖8 錯臺環與環分析圖
圖9 錯臺環分析圖
3.3 滲水分析
三維激光移動掃描系統獲取的三維點云數據中不僅包含坐標信息,還包含反射強度信息,利用RGB反射強度信息可以判讀出滲水信息,如圖10、圖11所示。
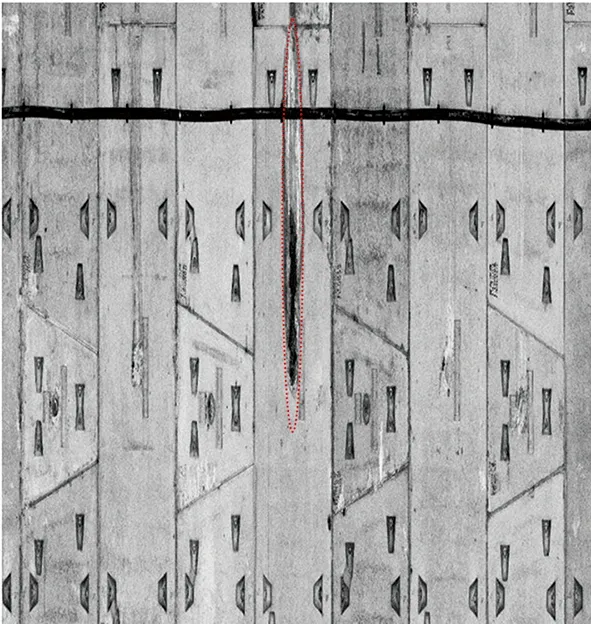
圖10 里程YK11+681處有滲水
4 結 論
三維激光移動掃描系統是借助軌道小車,將傳統的站式掃描儀固定在小車上,實現勻速掃描獲取隧道空間三維點云數據的過程。由于在掃描過程中可以保持勻速前進,因而可以保證整個區間隧道點云密集程度的一致性,從而可以獲取高質量正射影像。通過圖像識別技術可以從影像信息中獲取比如滲水、裂縫等病害信息,極大提高了作業效率。三維激光點云數據同時含有三維坐標信息,因而可以獲取比如空間尺寸、限界分析等與空間形態有關的幾何信息。同時三維激光點云數據可以作為隧道的原始數據存檔,用于后續的線路規劃、檢查、展示等二次開發利用。本文借助青島地鐵2號線某盾構隧道區間,分析了三維激光移動掃描系統的相關應用,為類似工程提供很好的借鑒。

圖11 區間滲水情況影像強度示意圖
但從目前來看,三維激光移動掃描系統在地鐵隧道中的應用有待進一步的提升和擴展,尤其是點云數據處理算法方面有待進一步深入。隨著各個地區城市軌道交通的迅速發展,加之測繪技術手段日新月異,三維激光掃描技術勢必會在地鐵中得到廣泛的應用。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
家庭影院技術(2017年9期)2017-09-26 03:41:45
中華手工(2017年2期)2017-06-06 23:00:31
中外會展(2014年4期)2014-11-27 07:46:46
祝您健康(1987年3期)1987-12-30 09:52:32
祝您健康(1987年2期)1987-12-30 09:52:28
