岸邊集裝箱起重機拖車對位引導及安全防護系統(tǒng)
2021-03-04 07:42:06梁錦雄黃金海
港口裝卸 2021年1期
梁錦雄 徐 家 黃金海 竇 琴
1 招商港口集團 2 北京精衡偉視科技有限公司
1 引言
在集裝箱碼頭岸邊裝卸過程中,影響岸邊起重機(以下簡稱岸橋)作業(yè)效率的主要因素為內(nèi)拖車的初次停駐位置與正確位置存在偏差,吊具下放到接近裝卸高度時需要制動,內(nèi)拖車司機需要前后移動車輛與吊具對齊,吊具方能最后下放,導致作業(yè)過程被延長。精確對位依賴于內(nèi)拖車司機的作業(yè)技能,這種對位方式不僅耗時長,作業(yè)效率低下,而且存在磨損吊具角和碰損集裝箱角等問題,嚴重時可能會造成吊具砸碰拖車頭事故。為解決此問題,現(xiàn)階段集裝箱碼頭一般采用人工放置對位標方式實現(xiàn)內(nèi)拖車對位。這種方式雖可以提高對位速度,但是在多車道并發(fā)作業(yè)或作業(yè)模式發(fā)生變化時需要人工在作業(yè)現(xiàn)場頻繁移動對位標桿,耗費人力并存在嚴重的安全隱患。
2 研究現(xiàn)狀分析
2007年武玉升[1]提出基于超聲波測距的集裝箱岸橋吊具定位系統(tǒng)。2010年后該領(lǐng)域?qū)W者紛紛從計算機視覺技術(shù)角度解決吊具下方集裝箱定位的問題,Jung C等[2-5]提出將兩臺攝像機安裝在岸橋吊具上,實時采集吊具下方圖像信息并基于雙目立體視覺和霍夫變換算法定位集裝箱。2017年李定謝爾[6]研究利用SVM算法和視覺跟蹤檢測技術(shù)實現(xiàn)集裝箱定位。基于超聲波測距的方法雖然對硬件平臺要求不高,容易實現(xiàn),但因為容易受到外界環(huán)境的干擾,沒有實用性。而基于計算機視覺的集裝箱定位方法由于工程實際中受到高溫、強振動、強光等復雜工業(yè)環(huán)境對攝像機成像質(zhì)量影響較大,系統(tǒng)工作的穩(wěn)定性得不到保障,后期維護成本較大,這些理論研究方法難以在集裝箱碼頭實際推廣應用。
在實際應用系統(tǒng)方面,徐寶興[7]提出在岸橋大車行走機構(gòu)海陸兩側(cè)固定位置安裝紅外激光發(fā)射模塊和光敏檢測管的方案,通過對射式光電開關(guān)判斷內(nèi)拖車位置是否行駛到指定對位點。光電開關(guān)對位方式雖然具有反應速度快、成本低、功耗低、響應時間快以及使用壽命長等特點,但因為只能針對單一車道的內(nèi)拖車進行位置檢測,其他車道上行駛的內(nèi)拖車會干擾目標車道的對位判斷,并且采用光電開關(guān)對位方式的對位系統(tǒng)只適用于岸橋裝船作業(yè)中吊具與載箱內(nèi)拖車的對位,缺乏靈活性和可拓展性。包起帆、陳志輝等[8-9]提出將激光掃描儀安裝在云臺上對岸橋下方的各作業(yè)車道進行掃描測距,利用云臺旋轉(zhuǎn)實現(xiàn)車道切換,通過微處理器計算內(nèi)拖車上集裝箱與岸橋吊具起吊點之間的偏差,并將偏差量顯示在LED顯示屏上,向內(nèi)拖車司機提供準確的對位引導數(shù)據(jù)。但通過云臺旋轉(zhuǎn)切換車道在多車道同時作業(yè)時無法快速提供實際作業(yè)車道的對位引導信息;偏遠車道的激光掃描面較為傾斜,易受到內(nèi)拖車拖板高度和橫向位置的影響,對位數(shù)據(jù)不夠精確;云臺與激光掃描儀整體安裝結(jié)構(gòu)復雜,安裝難度較大;云臺工作一段時間后不僅存在角度累積誤差,需要定期校正,而且在海岸高潮濕、高鹽霧環(huán)境下,易發(fā)生機械故障,維修困難,使用成本較高,因此難以推廣。
基于對國產(chǎn)激光掃描儀的應用研究,提出一套面向集裝箱碼頭陸側(cè)裝卸作業(yè)的岸橋拖車對位引導及作業(yè)安全防護系統(tǒng)。系統(tǒng)通過作業(yè)信息顯示屏實時給出內(nèi)拖車當前位置與正確停駐位置之間的偏差量及調(diào)整方向,引導內(nèi)拖車司機預先駕駛內(nèi)拖車停駐在準確位置上,岸橋吊具下放過程中不用做中間停頓即能夠完成作業(yè),從而顯著提升作業(yè)效率;同時,通過進一步的數(shù)據(jù)分析,以實現(xiàn)對內(nèi)拖車水平拖吊具和吊具碰砸車頭/碰箱等作業(yè)險情的及時檢測和規(guī)避,實現(xiàn)岸邊作業(yè)的安全保護。
3 系統(tǒng)結(jié)構(gòu)及硬件設(shè)計
岸橋內(nèi)拖車對位引導及安全保護系統(tǒng)的原理結(jié)構(gòu)見圖1。系統(tǒng)主要由5臺車道二維激光掃描儀(以下簡稱激光掃描儀)、系統(tǒng)控制器SC、顯示控制器和4臺作業(yè)信息顯示屏組成。
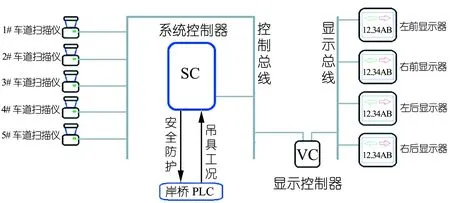
圖1 系統(tǒng)原理結(jié)構(gòu)圖
系統(tǒng)在每臺岸橋上安裝了5臺激光掃描儀,分別對5條常用作業(yè)車道的內(nèi)拖車進行準確定位,這樣不僅解決了單掃描儀+云臺旋轉(zhuǎn)方案的諸多應用問題,而且能同時獲取全部作業(yè)車道內(nèi)正在作業(yè)的內(nèi)拖車拖板及內(nèi)拖車載箱的準確剖面輪廓,能夠同時計算各作業(yè)車道的對位引導數(shù)據(jù)并動態(tài)確定當前作業(yè)車道,從而提高對位引導的有效性和時效性。
激光掃描儀是一種發(fā)射激光掃描光束探測目標的位置、速度等特征量的雷達系統(tǒng),能夠在全天候條件下有效工作,獲取精確的二維輪廓數(shù)據(jù),是本系統(tǒng)的基礎(chǔ)傳感器。選用戶外工作能力較強、性價比更高、具有較高的分辨率,尤其適合對目標的位置和形狀進行精確探測的國產(chǎn)激光掃描儀,同時采用多次回波分析技術(shù)實現(xiàn)雨霧煙塵穿透,確保了系統(tǒng)的有效性和可靠性。
系統(tǒng)控制器SC是本系統(tǒng)的多路數(shù)據(jù)采集和處理的核心部件,SC通過工業(yè)網(wǎng)絡(luò)與岸橋的PLC控制系統(tǒng)通信,獲得岸橋吊具的實時工況數(shù)據(jù),發(fā)送吊具制動等作業(yè)安全防護指令;通過工業(yè)以太網(wǎng)與各車道激光掃描儀通信,實時獲取各車道內(nèi)拖車及內(nèi)拖車載箱的準確剖面輪廓數(shù)據(jù),完成對位偏差量計算和作業(yè)險情檢測;通過工業(yè)以太網(wǎng)將對位引導信息以及安全離場信息實時發(fā)送到顯示控制器VC,引導拖車司機準確對位或安全離場。
系統(tǒng)控制器順序完成如下處理流程和功能:
(1)從岸橋PLC控制系統(tǒng)獲取吊具實時工況參數(shù)。
(2)計算吊具當前作業(yè)工況參數(shù)。
(3)從各激光掃描儀獲取各作業(yè)車道中線的實時掃描輪廓數(shù)據(jù)。
(4)從各作業(yè)車道中線的實時掃描輪廓數(shù)據(jù)中識別內(nèi)拖車拖板及載箱的實時輪廓,計算各車道內(nèi)拖車當前作業(yè)工況參數(shù)及內(nèi)拖車作業(yè)對位偏差量。
(5)基于吊具實時工況參數(shù)、各車道內(nèi)拖車當前作業(yè)工況參數(shù)及作業(yè)對位偏差量,生成各車道的對位引導信息及安全離場提示信息,同時根據(jù)各車道的實時作業(yè)狀態(tài)確定當前需要優(yōu)先顯示的作業(yè)車道。
(6)向顯示控制器發(fā)送當前優(yōu)先顯示作業(yè)車道的對位引導信息及安全離場提示信息。
(7)對吊具所在的作業(yè)車道的作業(yè)險情進行檢測和判定,作業(yè)險情為吊具碰砸內(nèi)拖車車頭、載箱或下方的非拖車目標。
(8)如發(fā)現(xiàn)存在作業(yè)險情,當?shù)蹙呦路鸥叨炔桓哂诎踩苿痈叨葧r,對岸橋PLC控制系統(tǒng)發(fā)出吊具下放制動指令。
顯示控制器VC通過以太網(wǎng)與系統(tǒng)控制器通訊,獲取對位引導信息和安全離場提示信息,并通過以太網(wǎng)分發(fā)到各作業(yè)信息顯示屏顯示。系統(tǒng)設(shè)計4臺高亮度室外型大尺寸圖文顯示屏作為作業(yè)信息顯示屏,分別安裝在岸邊起重機每個門柱的車道側(cè)便于內(nèi)拖車司機觀察的適當位置上。作業(yè)信息顯示屏采用全彩貼片式燈珠,具有廣視角、配光好、混光好和高對比度等特點,具備以太網(wǎng)接口,可接入系統(tǒng)局域網(wǎng),并做了充分的散熱、防水、防雷和防塵設(shè)計,能夠全天候穩(wěn)定工作,在強陽光下圖像清晰醒目。
4 應用測試
4.1 系統(tǒng)處理的內(nèi)拖車對位數(shù)據(jù)點示例
系統(tǒng)的核心是數(shù)據(jù)處理及算法設(shè)計,主要包括激光掃描儀數(shù)據(jù)實時處理、感興趣區(qū)域的劃定、對位特征點檢測、作業(yè)模式識別、對位偏差量計算及相關(guān)安全邏輯處理。算法主要分為3個部分:建立岸橋吊具、集裝箱和內(nèi)拖車平面模型,總結(jié)岸橋裝卸作業(yè)的全部作業(yè)工況,推導對位公式。圖2為經(jīng)數(shù)據(jù)處理后的空載內(nèi)拖車激光掃描數(shù)據(jù)點,圖2(a)為右行內(nèi)拖車,圖2(b)為左行內(nèi)拖車。圖中半圓形即為激光掃描儀,圖中大矩形框代表識別出來的內(nèi)拖車輪廓,小矩形框中為識別的拖車頭輪廓。大矩形框中3個小圈,位于最左和最右的2個圈內(nèi)的點即為對位算法識別出來的前后導板特征點,中間的圈為根據(jù)前后導板特征點計算出來的空載內(nèi)拖車對位基準點。
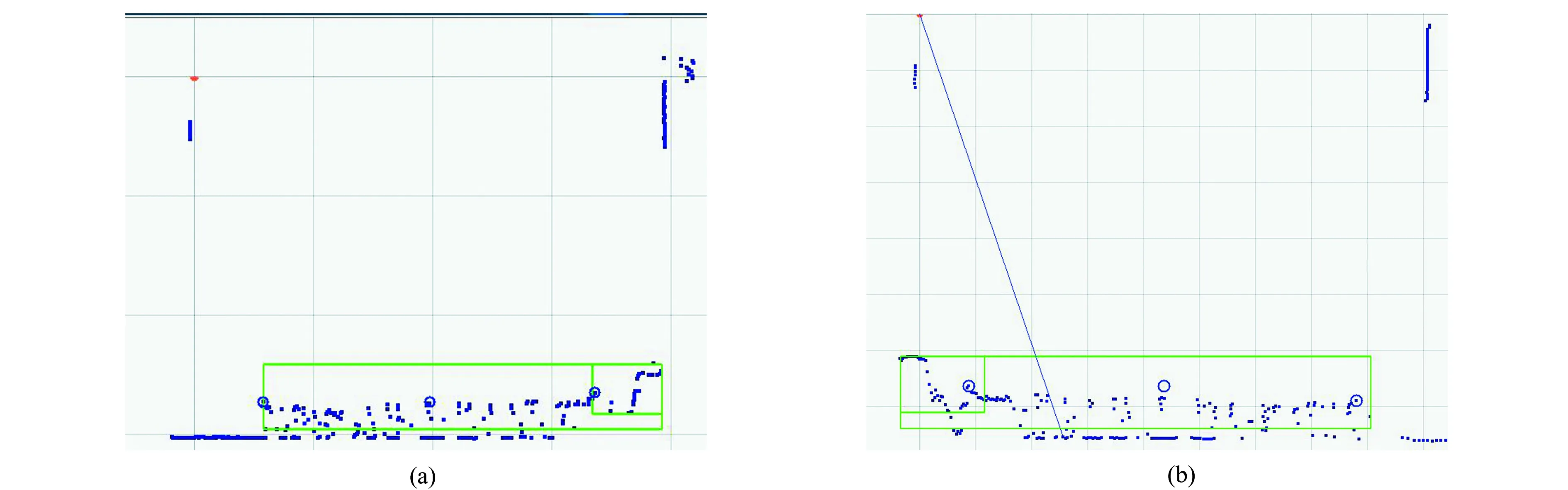
圖2 空載拖車數(shù)據(jù)點示例
圖3所示為正在等待20 ft卸船作業(yè)的空載內(nèi)拖車和雙20 ft載箱內(nèi)拖車的數(shù)據(jù)點示例。圖3(a)中,激光掃描儀正前方的矩形框即為被識別出來的吊具和吊具上的20 ft集裝箱輪廓。在吊具下放過程中,雖然會出現(xiàn)吊具和吊具上的集裝箱遮擋車頭數(shù)據(jù)點的情況,但系統(tǒng)會存儲和跟蹤前一時刻的車頭輪廓。在吊具全速下放過程中,若吊具存在砸車頭的趨勢,防砸算法的判定邏輯生效,此時系統(tǒng)會向岸橋PLC中寫入吊具下放制動指令,從而實現(xiàn)岸橋作業(yè)的安全防護。
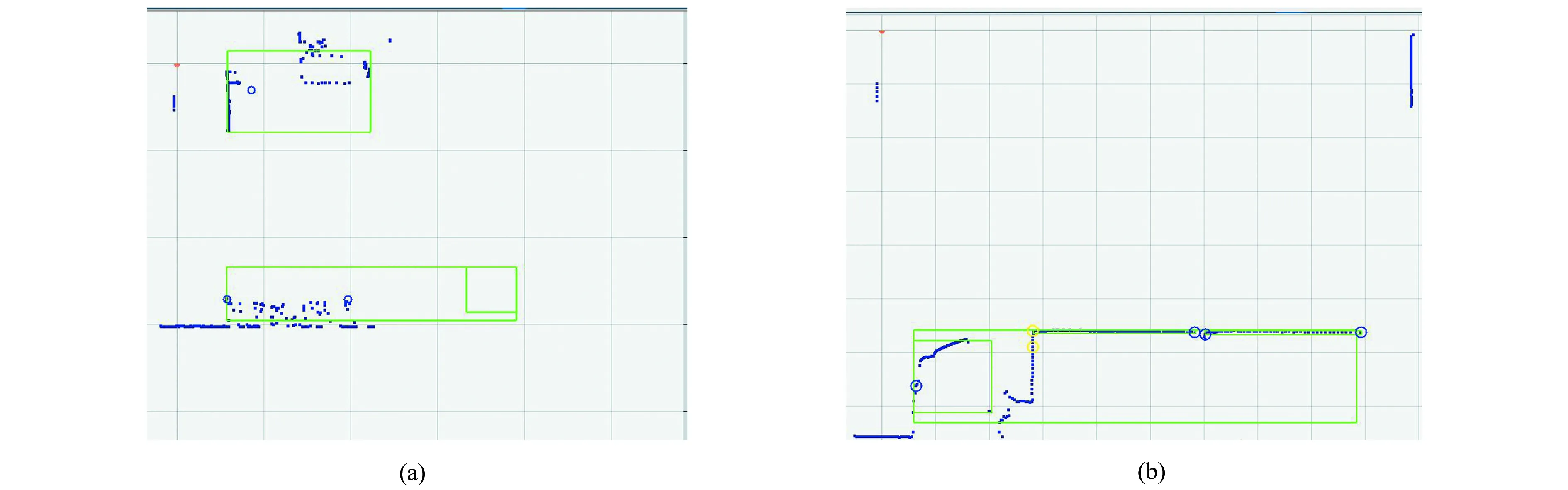
圖3 雙20 ft卸船作業(yè)的空載內(nèi)拖車和載箱內(nèi)拖車的數(shù)據(jù)點示例
圖3(b)為左行雙20 ft載箱內(nèi)拖車,雙20 ft箱對位的實現(xiàn)一直是內(nèi)拖車對位系統(tǒng)的一個難點,目前現(xiàn)有的對位系統(tǒng)均不支持雙箱對位,或雙箱對位準確性差、精度低。但從圖3(b)可以看到,即使前箱和后箱之間的間距很小,本系統(tǒng)對位算法也能夠精準識別和區(qū)分位于左側(cè)集裝箱的左/右特征點和右側(cè)集裝箱的左/右特征點。
4.2 系統(tǒng)安裝和運行結(jié)果
系統(tǒng)在深西集裝箱碼頭42號岸橋上安裝,系統(tǒng)迄今已經(jīng)運行近2年,經(jīng)過運行數(shù)據(jù)統(tǒng)計,當系統(tǒng)輸出對位信息在誤差允許范圍內(nèi)時,基本可以保證單次抓箱成功。此外,對內(nèi)拖車快速通過激光掃描區(qū)域和內(nèi)拖車倒車駛?cè)爰す鈷呙鑵^(qū)域等特殊工況也進行了測試,結(jié)果顯示特殊工況并未對系統(tǒng)功能造成干擾。
5 結(jié)語
該系統(tǒng)突出特點有4個方面:一是系統(tǒng)設(shè)計的激光掃描儀能夠同時獲取岸橋全部作業(yè)車道內(nèi)正在作業(yè)的內(nèi)拖車拖板及內(nèi)拖車載箱的準確剖面輪廓,同時計算各作業(yè)車道的對位引導數(shù)據(jù),動態(tài)確定當前作業(yè)車道并實現(xiàn)及時引導,提高了對位引導的有效性和時效性;二是可以準確區(qū)分拖車拖板上的雙20 ft箱與單40 ft箱,實現(xiàn)作業(yè)工況的準確識別;三是采用高質(zhì)量的國產(chǎn)激光掃描儀,不僅降低了傳感器的維護成本,而且后續(xù)將控制器功能內(nèi)置傳感器產(chǎn)品后,系統(tǒng)更加簡單可靠;四是本系統(tǒng)同時集成了內(nèi)拖車安全離場提示功能和防砸車頭/車道防碰箱功能,為岸橋的車道作業(yè)提供了全面的安全防護。該系統(tǒng)可為岸橋的內(nèi)拖車車道作業(yè)對位引導和安全防護兩種需求提供完整的、高集成度的系統(tǒng)解決方案,在岸橋裝卸作業(yè)中有一定的推廣價值。
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
學生天地(2020年17期)2020-08-25 09:28:54
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
故事大王(2016年7期)2016-09-22 17:30:08
