波輪洗衣機(jī)懸掛系統(tǒng)動力學(xué)建模及動力學(xué)特性研究
2021-03-03 06:07:24張強(qiáng)楊洪永熊瑞周鑫林
家電科技 2021年1期
張強(qiáng) 楊洪永 熊瑞 周鑫林
ZHANG Qiang YANG Hongyong XIONG Rui ZHOU Xinlin
珠海格力電器股份有限公司 廣東珠海 519070
Gree Electric Appliances, Inc. of Zhuhai Zhuhai 519070
1 引言
洗衣機(jī)已經(jīng)成為不可或缺的家用電器之一。按洗滌方式的不同,洗衣機(jī)可分為波輪式、滾筒式和攪拌式等。國內(nèi)市場以波輪洗衣機(jī)和滾筒洗衣機(jī)為主,且滾筒洗衣機(jī)所占比重越來越高,但波輪洗衣機(jī)因為價格低廉、洗凈度高、洗滌容量大等優(yōu)勢,仍然占有相當(dāng)?shù)氖袌龇蓊~。
隨著對生活品質(zhì)需求的不斷提升,用戶對家用電器的要求也越來越高,特別是振動水平,已經(jīng)成為衡量洗衣機(jī)性能的關(guān)鍵指標(biāo)之一。波輪洗衣機(jī)源起日本,我國波輪洗衣機(jī)起步于技術(shù)引進(jìn)或產(chǎn)品模仿,而且國內(nèi)洗衣機(jī)廠商研發(fā)重點集中在產(chǎn)品本身,對波輪洗衣機(jī)振動機(jī)理缺乏深入研究。對洗衣機(jī)的減振,仍以試錯式的樣機(jī)驗證為主,產(chǎn)品在設(shè)計初期缺乏低振動設(shè)計的理論指導(dǎo),導(dǎo)致振動問題較多,且嚴(yán)重影響產(chǎn)品開發(fā)進(jìn)度。
目前有關(guān)波輪洗衣機(jī)振動特性的文獻(xiàn)較多,錢靜[1],陳海衛(wèi)[2]等對波輪洗衣機(jī)懸掛系統(tǒng)的動力學(xué)特性進(jìn)行了細(xì)致研究,但所建立的振動模型都較為復(fù)雜,不適于洗衣機(jī)結(jié)構(gòu)設(shè)計工程師直接使用。本文將波輪洗衣機(jī)懸掛系統(tǒng)的運(yùn)動簡化為平面二自由度系統(tǒng)的運(yùn)動,并建立了其二自由度運(yùn)動微分方程,然后對此二自由度系統(tǒng)的動力學(xué)特性進(jìn)行了研究,探討了平衡環(huán)和吊桿安裝位置對懸掛系統(tǒng)振動的影響,提供了一種研究波輪洗衣機(jī)懸掛系統(tǒng)振動的工程方法。
2 懸掛系統(tǒng)動力學(xué)建模
2.1 模型簡化
波輪洗衣機(jī)桶部件通過四根吊桿懸掛于箱體四角,如圖1a)所示,吊桿上端(吊桿座)與箱體角板連接,下端(上托)與桶部件連接,上下連接點均可視為球鉸,如圖1b)所示,故吊桿的金屬桿只承受軸向載荷,為二力桿模型,吊桿阻尼筒(即上托)內(nèi)包含彈簧和阻尼元件,分別用于緩沖桶部件的振動沖擊和抑制桶部件的共振幅值。
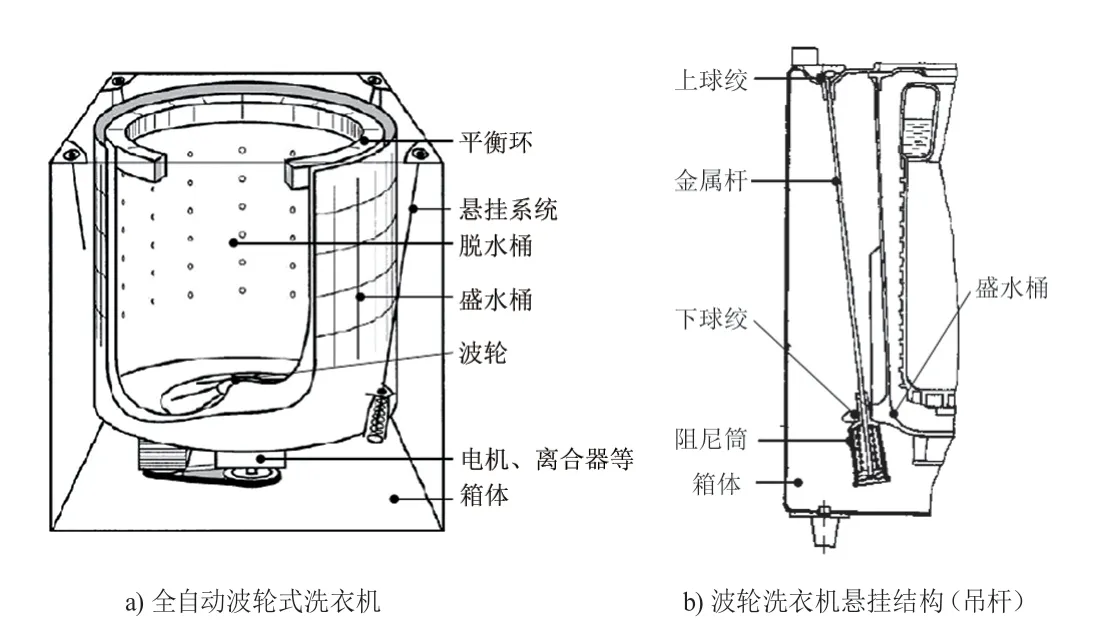
圖1 全自動波輪洗衣機(jī)結(jié)構(gòu)圖[3]
波輪洗衣機(jī)于脫水轉(zhuǎn)速穩(wěn)定運(yùn)行時,桶部件徑向振幅可視為沿圓周方向處處相等,故可將其懸掛系統(tǒng)運(yùn)動簡化為平面運(yùn)動,在簡化平面內(nèi)有兩個運(yùn)動分量,分別是桶部件的平動(表現(xiàn)為吊桿類似于單擺的擺動)和轉(zhuǎn)動,由此可將波輪洗衣機(jī)懸掛系統(tǒng)的運(yùn)動模型簡化為平面二自由度模型。
將吊桿與桶部件的連接方式進(jìn)行簡化,將四根吊桿簡化為一根,吊桿與桶部件的鉸接點簡化至桶軸線與彈簧支點連線的交線處,如圖2所示。圖3為波輪洗衣機(jī)懸掛系統(tǒng)的平面二自由度模型圖,桶部件的平動表現(xiàn)為吊桿的轉(zhuǎn)動,記為θ1,桶部件的轉(zhuǎn)動記為θ2,本文將針對簡化的模型進(jìn)行數(shù)學(xué)建模和求解。
根據(jù)重心位置不同,如圖4所示,可以將懸掛系統(tǒng)二自由度模型分為三種:a)桶部件質(zhì)心在彈簧支點上側(cè);b)桶部件質(zhì)心與彈簧支點同高度;c)桶部件質(zhì)心在彈簧支點下側(cè),本文主要討論第三種情況,即空桶偏心工況。
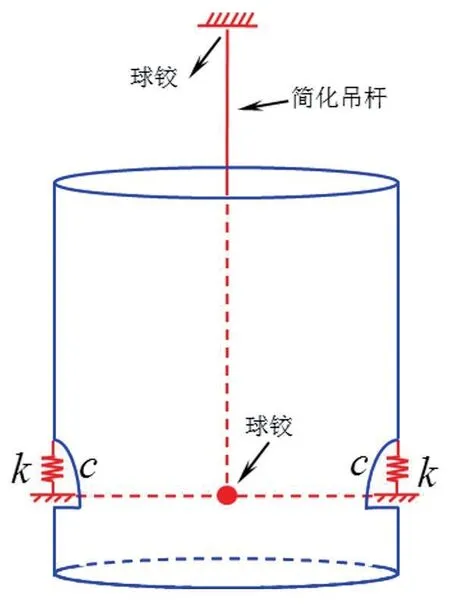
圖2 波輪洗衣機(jī)懸掛系統(tǒng)動力學(xué)簡化模型
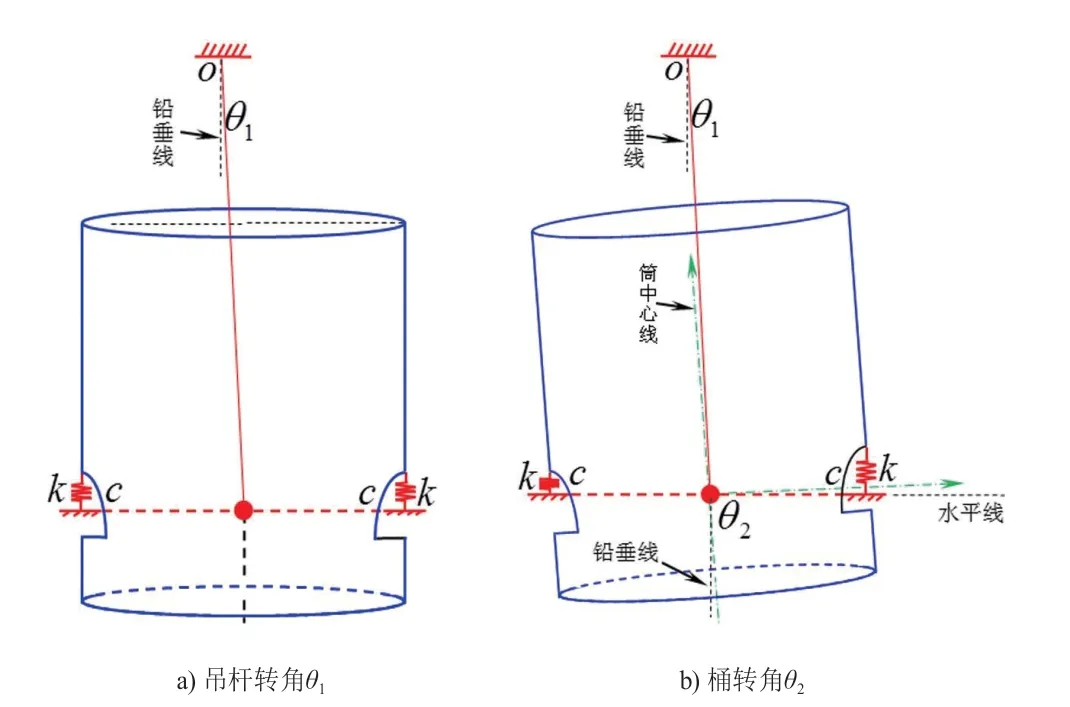
圖3 波輪洗衣機(jī)懸掛系統(tǒng)平面二自由度模型

圖4 桶部件質(zhì)心位置的三種情況
2.2 動力學(xué)建模
2.2.1 基本假設(shè)
波輪洗衣機(jī)懸掛系統(tǒng)平面二自由度模型的初始狀態(tài)如圖5a)所示,本文動力學(xué)建模有以下兩點基本假設(shè):
(1)僅分析懸掛系統(tǒng)的穩(wěn)態(tài)振動,因阻尼對穩(wěn)態(tài)振動影響較小,故動力學(xué)建模中忽略吊桿阻尼c,僅考慮吊桿剛度k;
(2)內(nèi)桶頂端安裝有液體平衡環(huán)(見圖1),液體平衡環(huán)中的液體依據(jù)自動定心原理向偏心負(fù)載相對一側(cè)移動,理論上在桶部件轉(zhuǎn)速遠(yuǎn)大于懸掛系統(tǒng)共振轉(zhuǎn)速時,平衡環(huán)液體的平衡質(zhì)量與偏心負(fù)載的質(zhì)量相位差接近180°,本分析假定達(dá)到洗衣機(jī)最高脫水轉(zhuǎn)速時二者相位差等于180°,即圖5a)中偏心質(zhì)量m1和液體平衡環(huán)中液體的抗偏心質(zhì)量m2的旋轉(zhuǎn)離心力方向相反;另外平衡環(huán)液體的偏移量與懸掛系統(tǒng)振動幅值兩者之間相互影響,本分析不考慮二者之間的雙向耦合問題,假定平衡環(huán)中的液體集中于一處,產(chǎn)生的平衡力為m2rω2,其中r為旋轉(zhuǎn)半徑。
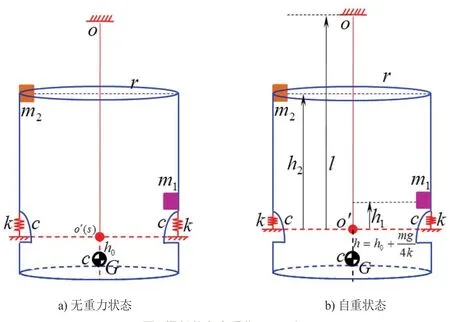
圖5 桶部件在自重作用下下沉
2.2.2 運(yùn)動方程(Equation of Motion)
在簡化模型中,吊桿與箱體的鉸接點標(biāo)記為O,將吊桿與彈簧支點連線的交點定義為吊桿與桶部件的鉸接點,并標(biāo)記為O’。圖5a)中初始狀態(tài)在桶部件上與O’點重合位置標(biāo)記S點,S點為桶部件隨體運(yùn)動點,桶部件在自重作用下下沉,S點下移,與O’點脫離,達(dá)到圖5b)中的自重狀態(tài),O’S長度,即彈簧壓縮量,為mg/4k,其中m為桶部件總質(zhì)量,k為單根彈簧的剛度,四根彈簧并聯(lián)剛度為4k。
以圖5b)自重狀態(tài)為基準(zhǔn),標(biāo)記桶部件質(zhì)心C與O’點高度差、偏心質(zhì)量m1與O’點高度差、平衡環(huán)抗偏心質(zhì)量m2與O’點高度差分別為h,h1,h2,吊桿長度為l。在圖5b)基準(zhǔn)狀態(tài)上,桶部件發(fā)生平動和轉(zhuǎn)動運(yùn)動后各參量的狀態(tài)變化見圖6和圖7。
根據(jù)達(dá)郎貝爾原理,建立針對O點和O’點的力矩動平衡方程,即獲得圖7所示平面二自由度模型的運(yùn)動微分方程:
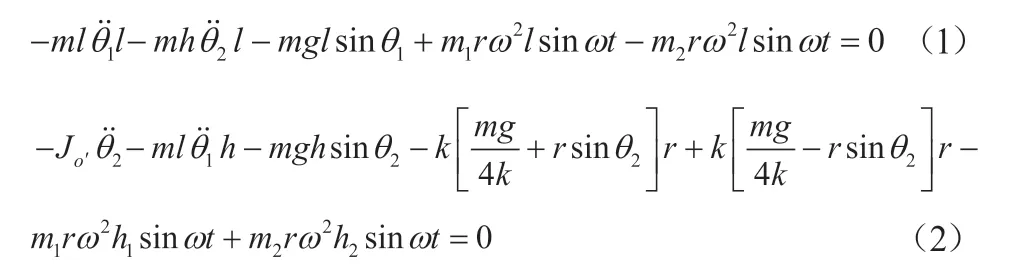
式(2)中,Jo'為桶部件繞O’點的轉(zhuǎn)動慣量,將式(1)、(2)整理為:
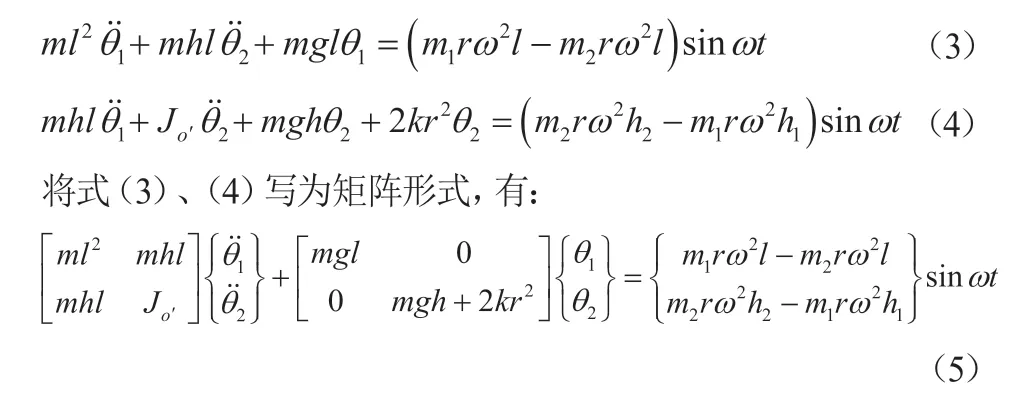
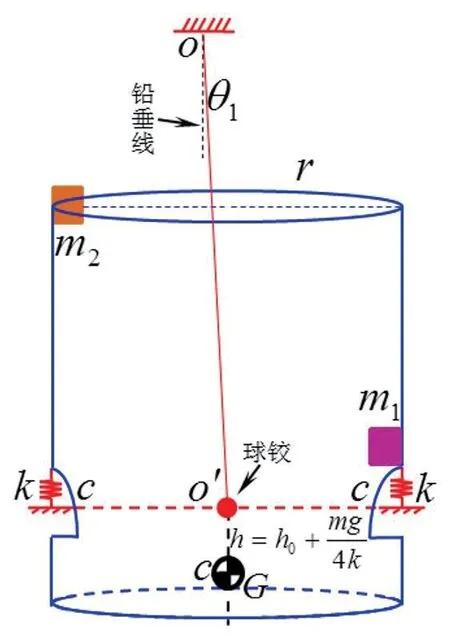
圖6 桶部件平動
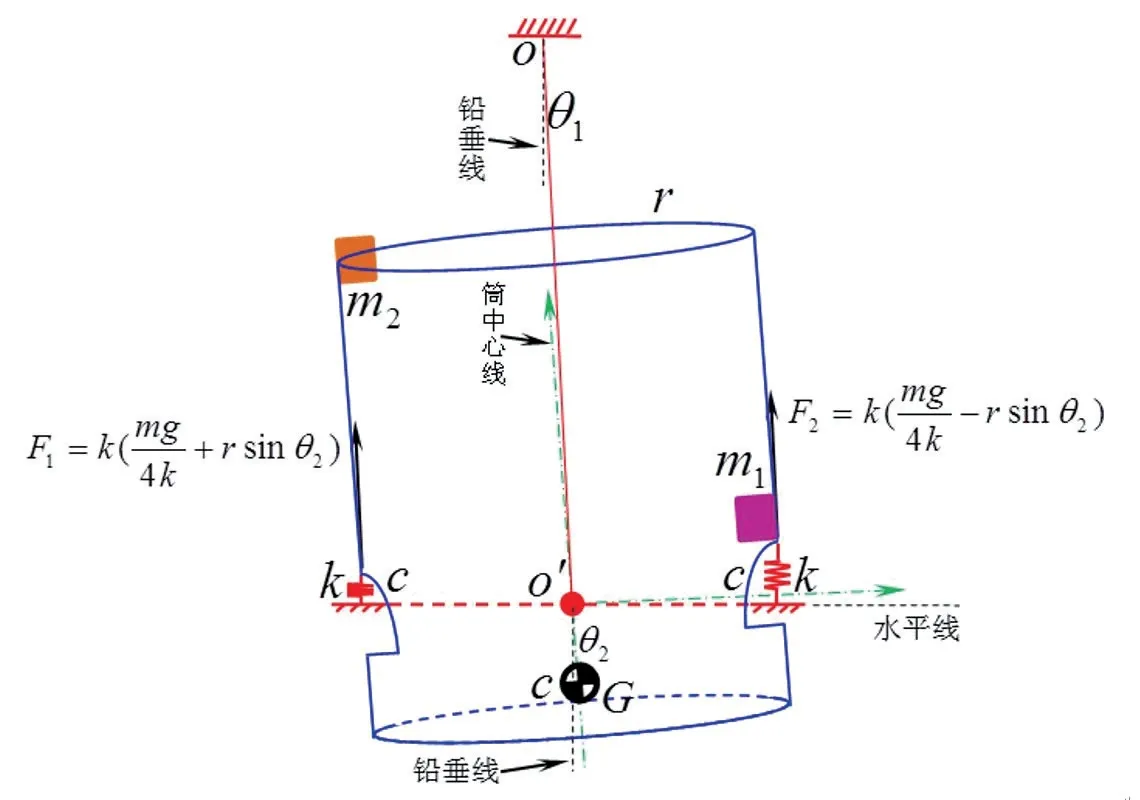
圖7 桶部件平動+轉(zhuǎn)動
式(5)即為波輪洗衣機(jī)懸掛系統(tǒng)平面二自由度模型的運(yùn)動微分方程。
使用拉格朗日方法建立該平面二自由度模型的運(yùn)動方程,廣義坐標(biāo)定義為吊桿繞O點的轉(zhuǎn)角θ1和桶部件繞O’點的轉(zhuǎn)角θ2:
系統(tǒng)動能為:

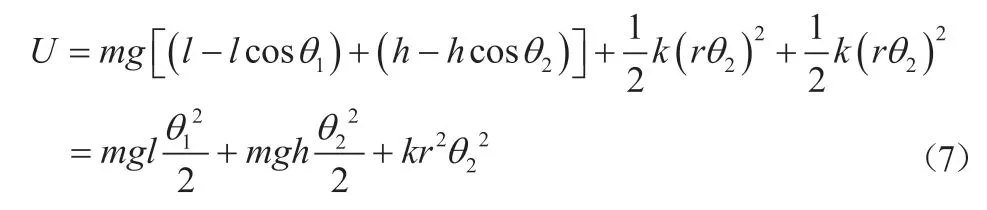
系統(tǒng)勢能為:
廣義坐標(biāo)θ1和θ2對應(yīng)的廣義力分別為:

將式(6)、(7)、(8)、(9)代入拉格朗日方程:

得到系統(tǒng)的運(yùn)動方程:

將式(11)、(12)寫為矩陣形式:

式(5)與式(13)一致,即使用達(dá)郎貝爾原理和拉格朗日方法建立的運(yùn)動方程一致,進(jìn)一步佐證了所建運(yùn)動方程的正確性。
2.2.3 模型求解
對式(5)所示運(yùn)動方程進(jìn)行求解,并根據(jù)求解結(jié)果對波輪洗衣機(jī)懸掛系統(tǒng)動力學(xué)特性進(jìn)行研究,設(shè)定:

將式(14)、(15)代入式(5),式(5)可寫為:

因為是無阻尼系統(tǒng),假設(shè)式(16)的解為:

將式(17)代入式(16)得:
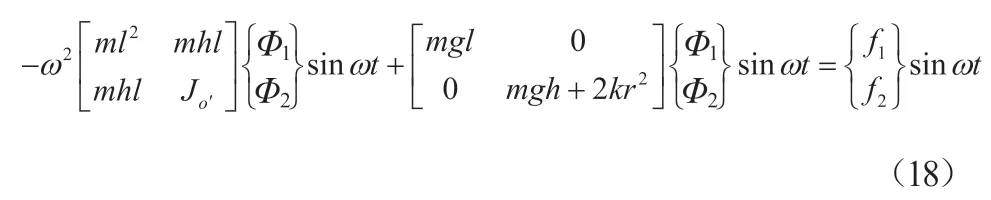
進(jìn)一步寫為:

設(shè)定:

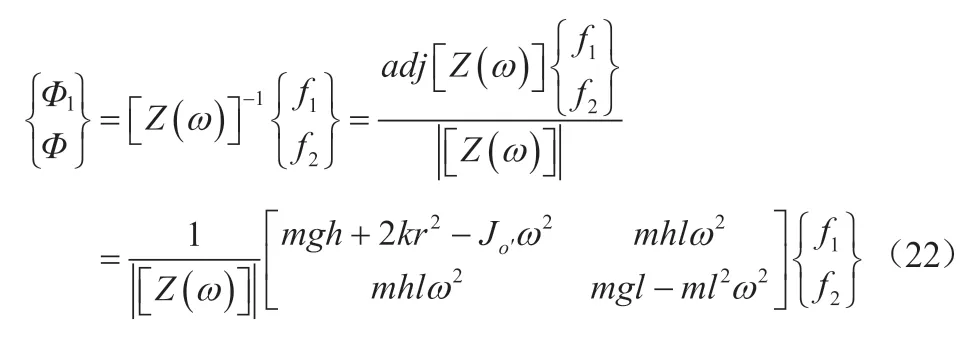
將式(20)代入式(19)得:

式(21)的解為:
針對式(21),滿足如下關(guān)系的ω值,則為運(yùn)動方程的特征值:

運(yùn)動方程的特征值即為運(yùn)動系統(tǒng)的固有頻率,因為所建模型為二自由度系統(tǒng),存在兩階固有頻率,將其分別標(biāo)記為ω1和ω2,則存在如下關(guān)系:

運(yùn)動方程的最終解為:
桶部件頂端的合位移為:

3 動力學(xué)特性研究
假設(shè)某波輪洗衣機(jī)懸掛系統(tǒng)各參數(shù)如下:m=20 kg;m1=0.5 kg;m2=0 kg(暫不考慮平衡環(huán)平衡力);Jo'=1 kg·m2;l=0.45 m;r=0.25 m;h=0.05 m;h1=0.06 m;h2=0.3 m;k=2500 N/m。基于此波輪洗衣機(jī)系統(tǒng)進(jìn)行波輪洗衣機(jī)懸掛系統(tǒng)的動力學(xué)特性分析。
3.1 振型分析
使用設(shè)定的懸掛系統(tǒng)各參數(shù),求解式(23),可得運(yùn)動方程的特征值,即系統(tǒng)的共振圓頻率:

按照單擺固有頻率公式求解波輪懸掛系統(tǒng)第一階擺動模態(tài)的固有圓頻率,如下:

與所建平面二自由度模型解出的第一階固有圓頻率相當(dāng),進(jìn)一步證明了波輪洗衣機(jī)懸掛系統(tǒng)第一階模態(tài)的振型等同于單擺的振動。其第二階模態(tài)的振型是與質(zhì)量、彈簧相關(guān)的彈性跳動模態(tài),其大小由懸掛系統(tǒng)質(zhì)量和彈簧剛度決定。
3.2 平衡環(huán)對系統(tǒng)振動的影響
使用設(shè)定的懸掛系統(tǒng)各參數(shù),根據(jù)式(25)、(26)、(27)繪制Φ1(ω)、Φ2(ω)、X(ω)的幅頻曲線,分別如圖8、圖9、圖10所示。
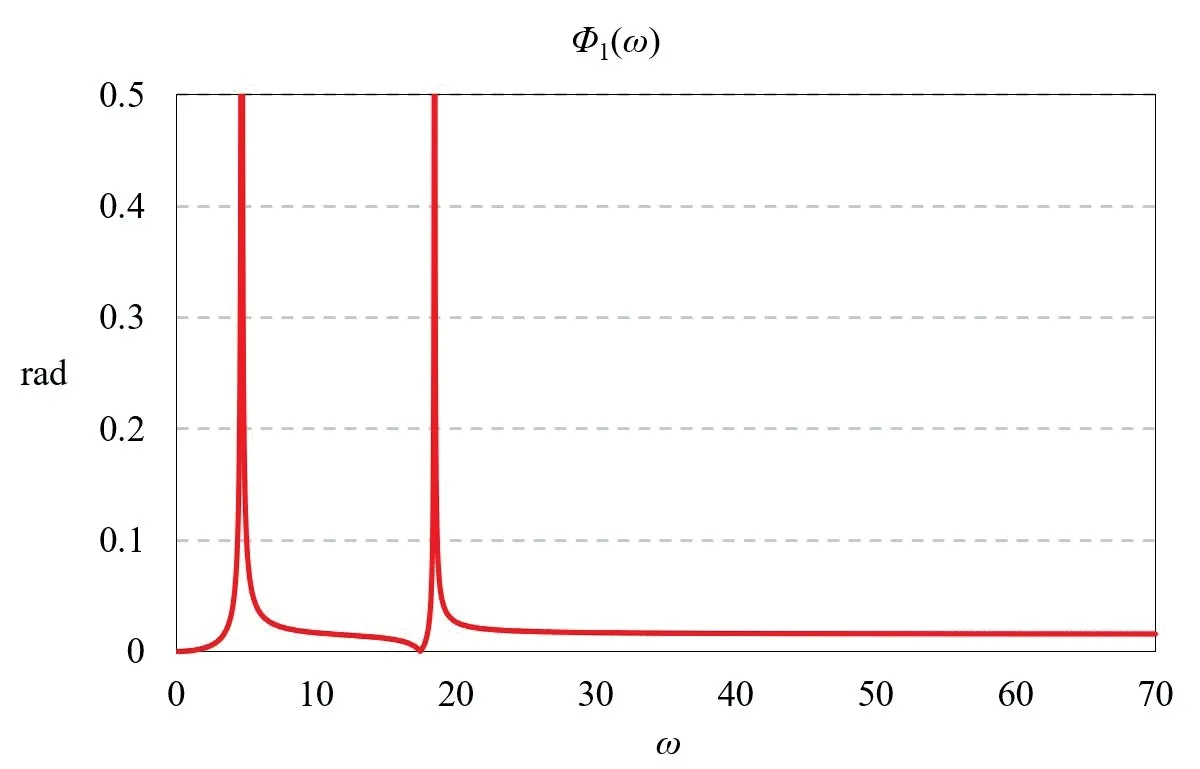
圖8 Φ1(ω)幅頻曲線
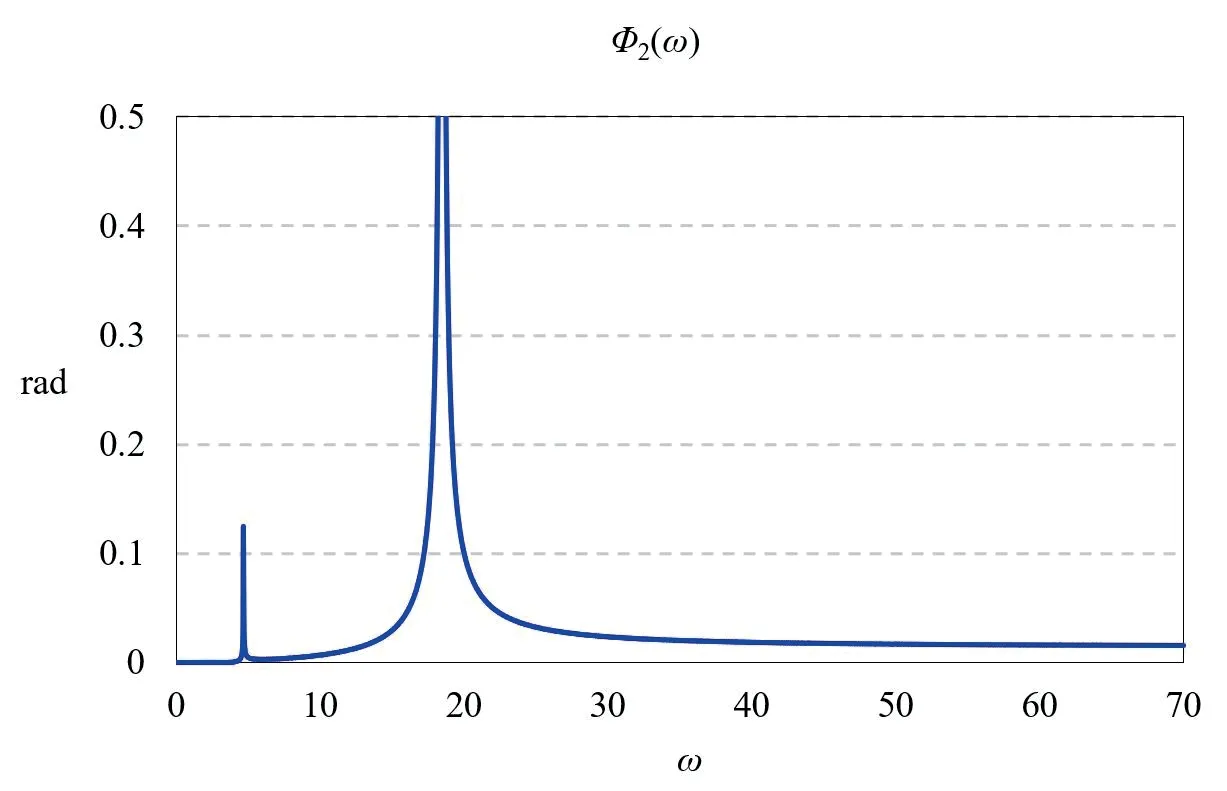
圖9 Φ2(ω)幅頻曲線
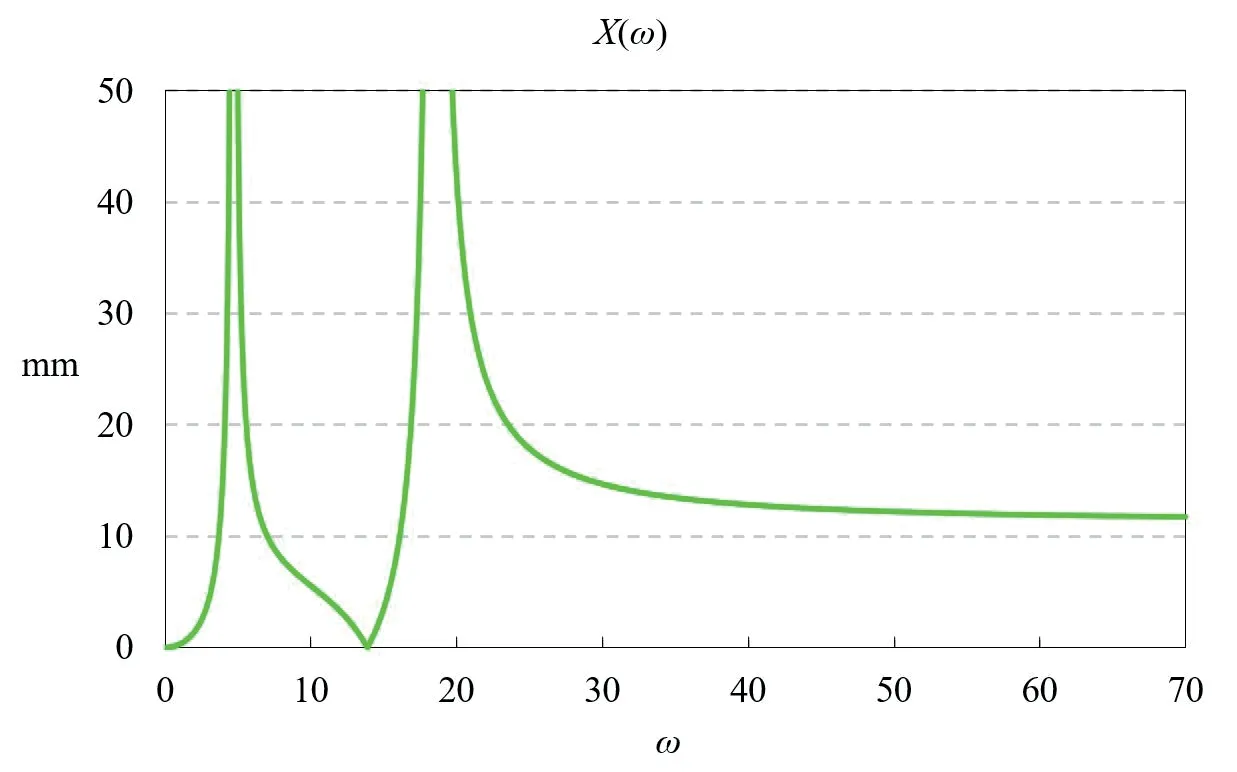
圖10 合位移X(ω)幅頻曲線
為考察平衡環(huán)平衡力對懸掛系統(tǒng)振動的影響,分別假設(shè)平衡環(huán)內(nèi)液體的抗偏心質(zhì)量為0 kg、0.1 kg、0.2 kg、0.3 kg、0.4 kg、0.5 kg,桶部件頂端合位移X(ω)的幅頻曲線見圖11。
從分析結(jié)果可以看出,主要由第一階模態(tài)(單擺模態(tài))貢獻(xiàn)的振動幅值與偏心力、平衡環(huán)平衡力的力差成正比,主要由第二階模態(tài)(質(zhì)量-彈簧模態(tài))貢獻(xiàn)的振動幅值與偏心力、平衡環(huán)平衡力相對于吊桿-桶部件鉸接點的力矩差成正比。
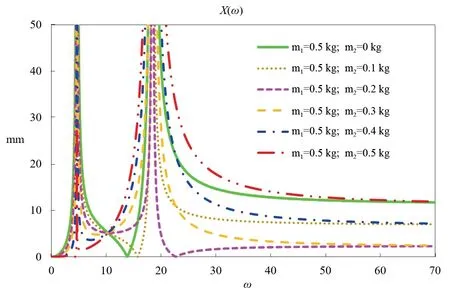
圖11 不同平衡環(huán)抗偏心質(zhì)量工況下合位移X(ω)幅頻曲線
3.3 吊桿安裝位置對系統(tǒng)振動的影響
為考察吊桿安裝位置(吊桿-桶部件鉸接點位置)對懸掛系統(tǒng)振動的影響,分別將桶部件向上移動10 mm、20 mm,向下移動10 mm、20 mm(隨之發(fā)生變化的參數(shù)包括h、h1、h2、Jo'),第一、二階固有頻率隨之發(fā)生變化,各種工況下的系統(tǒng)固有頻率見表1。假定平衡環(huán)抗偏心質(zhì)量為0.3 kg,桶部件頂端合位移幅頻曲線見圖12。
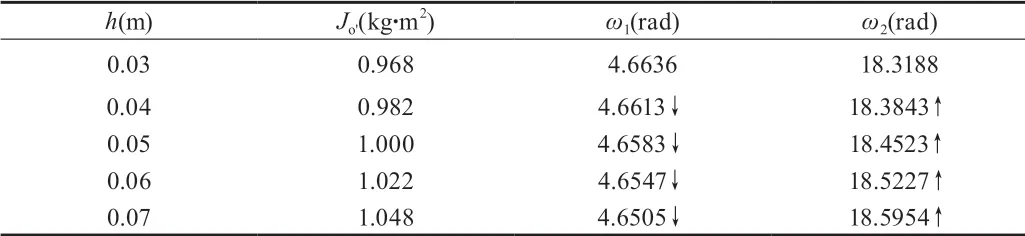
表1 固有頻率對比
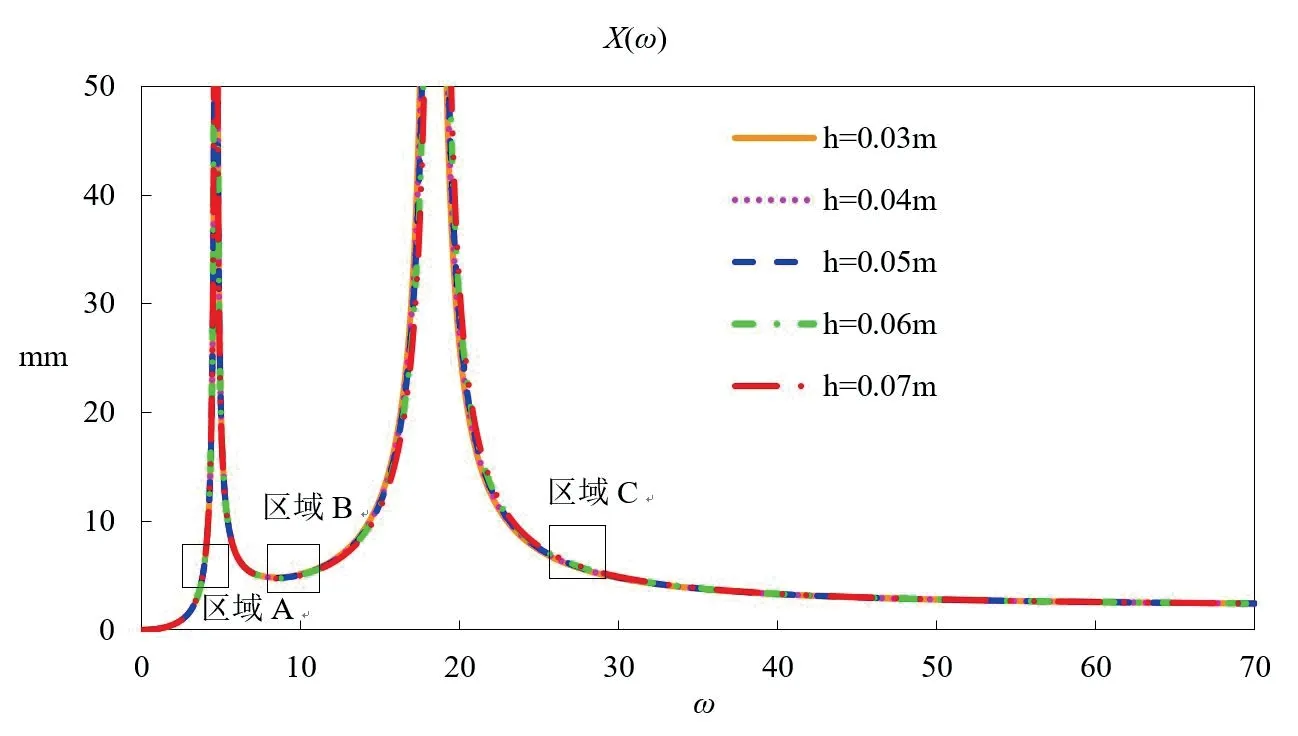
圖12 不同吊桿安裝位置工況下合位移X(ω)幅頻曲線
從圖12、圖13的幅頻特性曲線可以看出:
(1)在低頻(第一個共振點之前)和高頻(第二個共振點之后)階段,桶部件質(zhì)心越靠近吊桿-桶鉸接點,桶部件振幅越小;在中間階段(第一、二個共振點之間),桶部件振幅與吊桿安裝位置沒有明顯的一致性。總體而言,吊桿安裝位置的小幅變更對桶部件的振動影響幅度較小。
(2)桶部件質(zhì)心靠近吊桿-桶鉸接點,第一個共振點幅值升高,第二個共振點幅值降低。
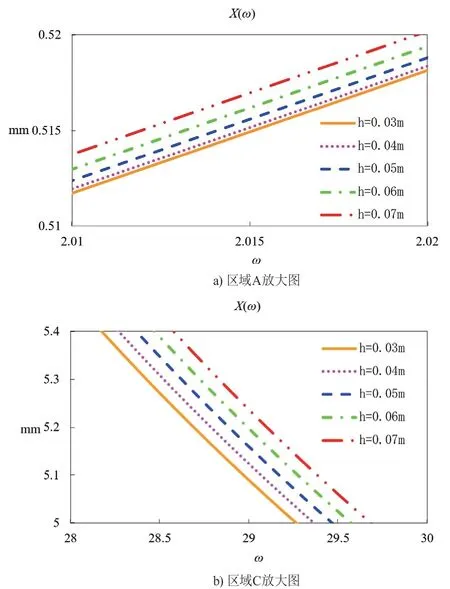
圖13 對圖12部分區(qū)域放大圖
3.4 理論分析
從3.1節(jié)的論述中可知,通過所建平面二自由度模型求解出的模型第一階固有頻率值與單擺固有頻率理論公式求解值一致,簡化模型與基本理論吻合,本節(jié)進(jìn)一步從理論分析的角度解釋3.2節(jié)、3.3節(jié)所得結(jié)論的合理性。波輪洗衣機(jī)有兩類鉸接點:吊桿和箱體鉸接點、吊桿和外桶鉸接點,均可視為球鉸接,球鉸只傳遞力而不可傳遞力矩,所以內(nèi)桶衣物偏心產(chǎn)生的激勵力,可使桶部件產(chǎn)生平動,而激振力相對于吊桿和外桶鉸接點的力矩可使桶部件產(chǎn)生轉(zhuǎn)動,這與3.2節(jié)所得結(jié)論一致。當(dāng)桶部件的質(zhì)心位置越靠近吊桿-外桶鉸接點,平動和轉(zhuǎn)動模態(tài)的耦合程度越小,桶的振動越小,這與3.3節(jié)所得結(jié)論也是吻合的。以上理論分析進(jìn)一步佐證了所建波輪洗衣機(jī)懸掛系統(tǒng)平面二自由度模型的合理性。
4 結(jié)論
(1)將波輪洗衣機(jī)懸掛系統(tǒng)的運(yùn)動簡化為平面二自由度運(yùn)動,從而建立了其二自由度運(yùn)動方程,先是對懸掛系統(tǒng)的振型進(jìn)行了分析,然后繪制了兩個自由度及其合位移的幅頻特性曲線,得到了桶部件頂端位移的計算公式,可以據(jù)此進(jìn)行桶部件穩(wěn)態(tài)振幅的計算;
(2)根據(jù)所建立的運(yùn)動方程,對波輪洗衣機(jī)懸掛系統(tǒng)的動力學(xué)特性進(jìn)行了研究,分別探討了平衡環(huán)平衡力和吊桿安裝位置對桶部件振動的影響。通過對平衡環(huán)平衡力的研究,得出以下結(jié)論:主要由第一階模態(tài)(單擺模態(tài))貢獻(xiàn)的振動幅值與偏心力、平衡環(huán)平衡力的力差成正比,主要由第二階模態(tài)(質(zhì)量-彈簧模態(tài))貢獻(xiàn)的振動幅值與偏心力、平衡環(huán)平衡力相對于吊桿-桶部件鉸接點的力矩差成正比。
(3)分析中未考慮平衡環(huán)液體偏移量與桶部件振幅的雙向耦合問題,根據(jù)所推導(dǎo)的桶部件頂端合位移的穩(wěn)態(tài)振幅公式,可以結(jié)合平衡環(huán)內(nèi)液體偏移量與平衡環(huán)液體質(zhì)心之間的關(guān)系[3],對平衡環(huán)液體偏移量和桶部件振幅進(jìn)行迭代計算,從而最終確定各種工況下達(dá)到穩(wěn)態(tài)階段時平衡環(huán)內(nèi)的液體偏移量。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
科學(xué)大眾(2023年17期)2023-10-26 07:39:14
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
天天愛科學(xué)(2020年6期)2020-09-10 07:22:44
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
數(shù)學(xué)物理學(xué)報(2017年6期)2018-01-22 02:26:40
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
湖北經(jīng)濟(jì)學(xué)院學(xué)報·人文社科版(2015年8期)2015-12-29 05:53:07
上海電機(jī)學(xué)院學(xué)報(2015年4期)2015-02-28 14:30:00
計算物理(2014年2期)2014-03-11 17:01:44