基于傳感器技術的新型泵站水閘實時信息采集管理系統
2021-03-03 04:03:00王輝
水利科學與寒區工程 2021年1期
王 輝
(東莞市水利勘測設計院有限公司,廣東 東莞 523115)
1 基于傳感器的新型泵站水閘實時信息采集管理系統
泵站水閘是水利工程中的重要組成設備之一,通過啟停、升降水閘,實現攔洪、擋潮、抬高水位、泄洪、排澇、沖沙、取水等水資源調動和調控活動,從而實現水閘的有效控制和管理[1]。
隨著計算機信息技術、通信技術、控制技術的發展,新型泵站水閘逐漸取代了傳統泵站水閘,使得水資源度調控更加自動化,提高泵站水閘工作效率,但是也由于新型泵站水閘的應用,傳統的應用在泵站水閘管理中的實時信息采集管理系統無法滿足新型泵站水閘控制的需要,信息采集和管理出現嚴重的滯后性[2]。本文為滿足新型泵站水閘控制的需要,在傳統實時信息采集管理系統的基礎上,進行改進,研究集檢測、監視、管理、控制、維護等為一體的綜合性實時信息采集管理系統,全面提高系統的整體性能,以便更好地為新型泵站水閘服務。
1.1 系統整體框架設計
基于傳感器技術的新型泵站水閘實時信息采集管理系統整體框架設計大體分為三個單元,即現場控制單元、遠程控制單元和中間通信傳輸單元[3]。
(1)現場控制單元
現場控制單元負責對現場泵站水閘信息進行采集、處理、發送等操作,以及接收上位機發送過來的控制指令,并執行指令。該單元具體包括兩種功能:①由布設在現場的各類傳感器、視頻設備采集泵站水閘水位、液壓、閘高、開度、油泵電流等運行參數和狀態信號,然后對這些信息進行處理,最后將其發送給上位機,為指令生成提供可靠依據[4]。②上位機根據傳輸過來的信息生成指令并發送給現場控制設備,控制閘門工作,包括啟停、開度等,完成水資源調度。
(2)遠程控制單元
操作人員在遠控室實時查看水閘的運行狀態,同時上位機根據現場設備采集到的信息進行分析,并得出閘門的具體控制方案[5]。該單元具體包括三種功能:①接收現場信息,并進行存儲和在線顯示。②生成控制命令并發送,完成對閘門的提升、下降、停止和同步糾偏等控制。③建立數據庫,對實時和歷史信息進行備錄,并可隨時查看,兼有報警等功能。
(3)中間通信傳輸單元
現場控制單元和遠程控制單元之間需要中間通信傳輸單元作為橋梁,進行連接,完成信息傳輸和指令傳輸[6]。
1.2 系統關鍵硬件設計
1.2.1 傳感器
(1)液位傳感器
水位直接關系到閘門控制方案,因此液位傳感器是整個系統中最關鍵的硬件設備之一。本系統中采用的液位傳感器為MPM426W投入式變送器,用于閘門上下游水位計算[7]。該設備具體性能參數如表1所示。

表1 MPM426W投入式變送器主要性能參數指標
(2)壓力傳感器
壓力傳感器主要作用是采集液壓啟閉機中的油液壓力信息,油液壓力是以壓力油液作為介質來工作的,繼而控制閘門提升、降落等行為[8]。本系統當中的壓力傳感器為德魯克PTX 1400,主要性能參數如表2所示。
(3)閘門傳感器
閘門傳感器主要作用是檢測水閘的狀態信息,以便及時進行調整。本系統當中的閘門傳感器為一種ZKC-3型閘門開度傳感器。該傳感器安裝方便,適應性強,穩定可靠[9]。ZKC-3型閘門開度傳感器主要技術指標如表3所示。

表2 德魯克PTX 1400壓力傳感器主要性能參數

表3 ZKC-3型閘門開度傳感器主要技術指標
(4)視覺傳感器
視覺傳感器的作用是對整個現場設備的工作環境進行監測,主要采集視覺圖像信息,以便通過畫面及時發現異常。 本系統當中的視覺傳感器利用集成工業相機鏡頭拍攝的圖像來確定目標物體的存在、大小、形狀、方向和圖案等。采用LED照明,相機和鏡頭的集成設計使用戶可以更輕松地設置和管理設備。像機采用全景快門方式捕獲精確圖像,傳感器具有13種基本檢測功能,適用于各種應用。捕獲的圖像也可以直接保存到FTP服務器,以便單獨管理和分析檢測數據。
1.2.2 可編程控制器(PLC)
PLC是現場控制單元的核心,現場所有設備都通過I/O接口與之相連,實現現場設備的分布式控制。本系統當中的PLC為施耐德TWDL-CAC220DRF。該PLC主要性能特征有以下三點:
(1)10種本體,分別為10點、16點、24點或40點四種類型,其中6種本體分別可擴展4~7個數字量或模擬量模塊,還可以添加顯示界面、實時時鐘卡或儲卡等。
(2)內置模擬量I/O、可作為高速計數的快速輸入、脈沖輸出和以太網通訊等多種功能,幫助控制器滿足OEM客戶的設備控制要求。
(3)通訊協議:Modbus,CANopen,CAN J1939全部內部集成。
總而言之,TWDL-CAC220DRF具有靈活的配置,緊湊的結構,強大的功能,豐富的通信方式,CPU的Firmware可不斷升級。
1.2.3 多處理器芯片Neuron
Neuron是遠程控制單元的核心,起到主控作用。Neuron是一塊大規模集成電路,主要集成了CPU、存儲器、接口等部件,如圖1所示。

圖1 Neuron多處理器芯片結構
Neuron由于集成了三種CPU,工作效率高、配置也更為靈活,同時也支持多種傳輸介質,能夠實現泵站水閘群的同時控制[10]。
1.3 系統主要軟件程序設計
本系統軟件程序主要包括傳感器信息采集程序、水閘控制程序、監控報警程序。下面進行具體分析。
1.3.1 傳感器信息采集程序
本系統的關鍵是利用各種傳感器進行新型泵站水閘實時信息采集,通過采集到的信息進行水閘控制,因此傳感器信息采集程序是本系統中最關鍵的程序[11]。雖然有四種傳感器類型,但是基礎采集流程是大致相同的,具體如圖2所示。

圖2 傳感器信息采集程序
1.3.2 泵站水閘控制程序
本系統研究的目的是通過采集到的信息更好的為泵站水閘控制服務,因此泵站水閘控制程序是本系統中另一關鍵程序[12]。根據水閘狀態,分為水閘上升/下降子程序以及水閘左/右糾偏子程序,具體如圖3所示。

圖3 泵站水閘控制程序
1.3.3 監控報警程序
為及時發現現場環境中的異常,監控報警程序至關重要。
(1)視覺傳感器定時采樣警情圖像。
(2)對圖像進行處理,消除干擾。
(3)判斷是否存在異常?若不存在異常,則回到步驟1,若存在異常,則進行異常定位和登記。
(4)現場高分貝尖叫報警。
(5)向遠程操作人員發送報警信息,并給出警情位置和類型。
(6)工作人員采取相應措施處理[13]。
2 系統測試與分析
系統理論設計完成后,還需要進行測試與分析,發現設計中存在的問題,以便及時進行改進。
2.1 系統測試環境
系統測試環境對系統測試與分析尤為重要,具體配置見表4。

表4 系統測試環境
2.2 測試結果分析
系統測試方法一般分為白盒測試和黑盒測試兩種,分別用于系統性能和功能。
2.2.1 白盒測試結果
在上系統環境設置的基礎上,進行白盒測試,得到結果如表5所示。
2.2.2 黑盒測試結果
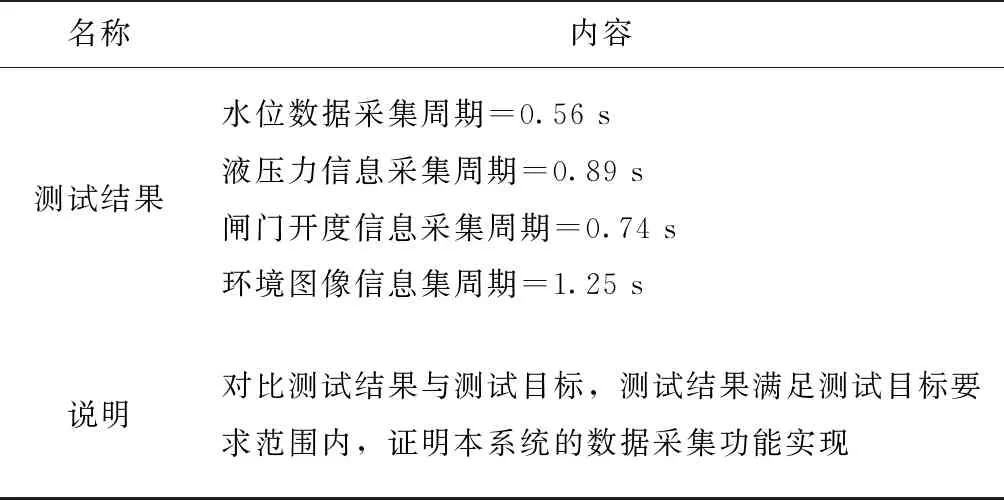
在上述系統環境設置基礎上,進行信息采集測試以滿足測試要求范圍,得到結果如表6,水閘控制功能測試結果如表7。

表5 白盒測試結果

表6 信息采集功能測試結果
續表6

表7 水閘控制功能測試結果
3 結 語
本系統經黑盒和白盒測試,證明了其性能和功能均達到了預期要求,但是本系統設計還存在一些不足,如系統需要在實際環境中進行進一步測試,以保證系統能夠在實際工作中得以應用,這也是未來研究的重點。
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
湖南水利水電(2021年6期)2022-01-18 06:07:40
電子制作(2018年11期)2018-08-04 03:26:08
中華手工(2017年2期)2017-06-06 23:00:31
河南水利年鑒(2017年0期)2017-05-19 02:32:09
河南水利年鑒(2016年0期)2016-08-03 05:01:40
工業設計(2016年12期)2016-04-16 02:52:00
河南水利年鑒(2015年0期)2015-08-16 04:25:49
中外會展(2014年4期)2014-11-27 07:46:46
消費者報道(2014年7期)2014-07-31 11:23:57
