機(jī)載陣列雷達(dá)風(fēng)輪機(jī)回波信號(hào)建模與分析
2021-03-02 05:36:24何煒琨王曉亮
系統(tǒng)工程與電子技術(shù) 2021年3期
關(guān)鍵詞:信號(hào)
何煒琨,劉 昂,王曉亮,張 瑩,陳 敏
(中國(guó)民航大學(xué)天津市智能信號(hào)與圖像處理重點(diǎn)實(shí)驗(yàn)室,天津 300300)
0 引 言
過(guò)往研究發(fā)現(xiàn),地基雷達(dá)在進(jìn)行目標(biāo)監(jiān)視、氣象觀測(cè)等工作時(shí)會(huì)受到風(fēng)力發(fā)電場(chǎng)的影響,運(yùn)作性能受到嚴(yán)重干擾。而對(duì)于機(jī)載雷達(dá)來(lái)說(shuō),這類影響更為復(fù)雜且難以應(yīng)對(duì)[1-3]。為了實(shí)現(xiàn)機(jī)載雷達(dá)風(fēng)電場(chǎng)雜波抑制和目標(biāo)檢測(cè),研究機(jī)載雷達(dá)風(fēng)輪機(jī)的電磁散射特性及回波仿真技術(shù)尤為重要。
目前,風(fēng)輪機(jī)的電磁散射特性及其回波仿真技術(shù)主要是針對(duì)地基雷達(dá)[4-9],對(duì)機(jī)載雷達(dá)的研究較少。Naqvi[10]利用短時(shí)傅里葉變換(short time Fourier transform,STFT)分析了1∶160風(fēng)輪機(jī)計(jì)算機(jī)輔助設(shè)計(jì)(computer aided design,CAD)模型散射回波的時(shí)頻特征,探究雷達(dá)處于機(jī)載高空平臺(tái)時(shí),地面反射回波對(duì)風(fēng)輪機(jī)散射特性的影響。Bhalla等人[11]利用風(fēng)輪機(jī)CAD模型,發(fā)現(xiàn)風(fēng)電場(chǎng)回波在距離-多普勒譜上會(huì)產(chǎn)生偽影,干擾目標(biāo)信號(hào),影響機(jī)載地面運(yùn)動(dòng)目標(biāo)指示(ground moving target indication,GMTI)的性能。另外,Cai等人[12]在研究風(fēng)電場(chǎng)對(duì)多功能機(jī)載監(jiān)視雷達(dá)的影響時(shí),認(rèn)為風(fēng)輪機(jī)葉片材料為理想導(dǎo)體,并利用物理光學(xué)(physics optical,PO)方法計(jì)算風(fēng)輪機(jī)縮微模型[4,13]的散射回波,但沒(méi)有給出機(jī)載雷達(dá)陣列天線風(fēng)輪機(jī)回波信號(hào)模型。
上述研究均通過(guò)建立風(fēng)輪機(jī)的三維模型,然后再研究其電磁散射特性,但這種方式的風(fēng)輪機(jī)模型制作方法較為困難,不方便修改參數(shù),且操作復(fù)雜,計(jì)算量大且耗費(fèi)時(shí)間。Mamgain[14]等人對(duì)機(jī)載監(jiān)視雷達(dá)的風(fēng)輪機(jī)回波進(jìn)行了仿真,并結(jié)合真實(shí)數(shù)據(jù),通過(guò)距離-多普勒譜對(duì)所構(gòu)建的模型進(jìn)行了驗(yàn)證。但其只給出了單通道的回波模型,沒(méi)有給出機(jī)載陣列雷達(dá)各通道風(fēng)輪機(jī)回波,且沒(méi)有對(duì)風(fēng)輪機(jī)回波信號(hào)特性進(jìn)行具體分析,無(wú)法全面了解風(fēng)輪機(jī)的回波特征。
目前,陣列天線雷達(dá)在機(jī)載雷達(dá)中的應(yīng)用越來(lái)越廣泛,其可以通過(guò)空時(shí)濾波有效地去除地面雜波,減緩雜波的干擾,在目標(biāo)監(jiān)視和氣象監(jiān)測(cè)方面發(fā)揮著極其重要的作用。基于這種情況,本文將機(jī)載陣列天線回波模型與風(fēng)輪機(jī)散射點(diǎn)疊加模型相結(jié)合,研究了當(dāng)雷達(dá)處于機(jī)載平臺(tái)時(shí),陣列天線風(fēng)輪機(jī)的回波建模問(wèn)題,給出任一觀測(cè)點(diǎn)處機(jī)載平臺(tái)各通道風(fēng)輪機(jī)回波模型,并將實(shí)驗(yàn)結(jié)果與理論分析結(jié)果進(jìn)行對(duì)比,從時(shí)頻譜、距離-多普勒譜和空時(shí)譜多個(gè)維度分析了機(jī)載陣列雷達(dá)風(fēng)輪機(jī)回波的微動(dòng)特征,驗(yàn)證所建模型的有效性。
1 機(jī)載陣列雷達(dá)風(fēng)輪機(jī)回波模型
風(fēng)輪機(jī)主要由葉片、桅桿和輪機(jī)艙組成。本文結(jié)合風(fēng)輪機(jī)散射點(diǎn)疊加理論[15],將風(fēng)輪機(jī)回波等效為一系列薄圓片回波合成[16],構(gòu)建風(fēng)輪機(jī)葉片的回波模型,并進(jìn)行特征分析。
圖1描述了典型的機(jī)載監(jiān)視雷達(dá)場(chǎng)景。其中,以載機(jī)所在位置作為原點(diǎn)建立坐標(biāo)系,飛行方向?yàn)閅軸正方向,速度為V,線陣陣元的排列方向?yàn)閄軸正方向,陣元間隔為d,風(fēng)輪機(jī)相對(duì)于雷達(dá)的方位角θ為雷達(dá)視線(line of sight,LOS)在XOY面內(nèi)的投影與Y軸的夾角,俯仰角φ為雷達(dá)LOS與XOY面的夾角,α和β分別為陣元夾角和速度夾角,波束直接照射風(fēng)輪機(jī)葉片軸心。
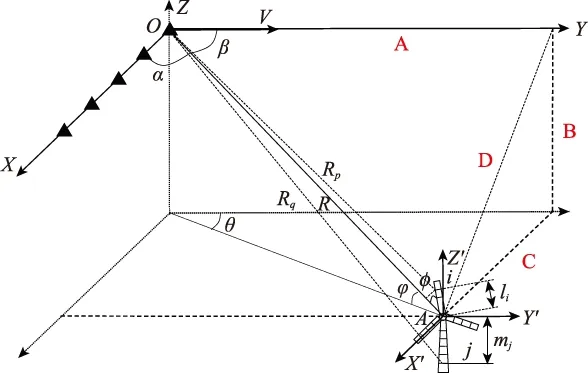
圖1 風(fēng)輪機(jī)與機(jī)載雷達(dá)幾何關(guān)系圖Fig.1 Geometric relationship graph between wind turbine and airborne radar
假設(shè)雷達(dá)所發(fā)射的信號(hào)為線性調(diào)頻信號(hào)(linear frequency modulation,LFM),令up(t)表示單個(gè)LFM的復(fù)包絡(luò),即
(1)
式中,A為信號(hào)幅度;T為脈沖寬度;μ=2πB/T,B為帶寬;rect(t/T)為矩形窗函數(shù)。
設(shè)雷達(dá)陣元發(fā)射相參脈沖串[17]為

(2)

(3)
式中,Tr為脈沖重復(fù)周期;K為脈沖串中的脈沖數(shù)。
第n個(gè)陣元接收到的單個(gè)散射點(diǎn)i的回波信號(hào)[17]可表示為

(4)
式中,ar表示散射點(diǎn)回波信號(hào)復(fù)幅度;τn為第n個(gè)陣元接收到的回波信號(hào)延時(shí);θi和φi分別為散射點(diǎn)i的方位角和俯仰角;ft(θi,φi)為散射點(diǎn)i由于載機(jī)速度所產(chǎn)生的多普勒頻率:
(5)
式中,λ為波長(zhǎng)。

(6)
則式(4)可進(jìn)一步寫為
(7)
式中,τt=2Ri(t)/c,c為光速,Ri(t)為葉片上任一散射點(diǎn)i到達(dá)雷達(dá)的距離;li為散射點(diǎn)i到風(fēng)輪機(jī)軸心的距離,由于(li/R)2→0[15],故
(8)
式中,φ(t)為葉片與雷達(dá)LOS的夾角;R為風(fēng)輪機(jī)軸心與雷達(dá)的距離。因此,由于路徑引起的相位差[15]為
(9)
另外,第n個(gè)陣元相對(duì)于參考陣元的相位差[17]可表示為
(10)
定義該散射點(diǎn)的歸一化空間角頻率為
(11)
假設(shè)雷達(dá)發(fā)射信號(hào)滿足窄帶條件,則回波信號(hào)的復(fù)包絡(luò)在陣元間保持恒定[17],且由式(9)~式(11)可知,式(7)可進(jìn)一步寫為

(12)

(13)
設(shè)一個(gè)葉片可以分為I個(gè)散射點(diǎn),則整個(gè)葉片的回波信號(hào)為

exp[j2πft(θi,φi)t+j(n-1)ωs(θi,φi)]·
(14)
設(shè)風(fēng)輪機(jī)有G個(gè)葉片(一般為3),葉片與雷達(dá)LOS相應(yīng)的夾角為φg(t),于是所有葉片總的回波信號(hào)可寫為
exp[j2πft(θi,φi)t+j(n-1)ωs(θi,φi)]·
(15)
式中,第g個(gè)葉片與雷達(dá)LOS的夾角余弦值cosφg(t)利用空間兩直線夾角公式[15]推導(dǎo)為
cosφg(t)=cosθcosφcosγg(t)+sinφsinγg(t)
(16)
式中,γg(t)為第g個(gè)葉片與水平軸Y′負(fù)方向的夾角,定義其為葉片夾角。
若j是桅桿上的任一點(diǎn),其到葉片軸心的距離為mj;桅桿上任意一點(diǎn)j到雷達(dá)的距離為Rj[15],則

(17)
雷達(dá)第n個(gè)陣元接收到的散射點(diǎn)j的回波信號(hào)為

(18)
與葉片回波推導(dǎo)過(guò)程類似,求出整個(gè)桅桿的回波信號(hào)并進(jìn)行下變頻,最終得出第n個(gè)陣元接收到的桅桿回波信號(hào)為
exp[j2πft(θj,φj)t+j(n-1)ωs(θj,φj)]·
(19)
式中,J為桅桿散射點(diǎn)數(shù)。因此,第n個(gè)陣元接收到的風(fēng)輪機(jī)回波可表示為
sWT(t,n)=sblade(t,n)+smast(t,n)
(20)
exp[j2πft(θi,φi)tm+j(n-1)ωs(θi,φi)]·
exp[j2πft(θj,φj)tm+j(n-1)ωs(θj,φj)]·
(21)
exp[j(k-1)ωt(θi,φi)+j(n-1)ωs(θi,φi)]+
exp[j(k-1)ωt(θj,φj)+j(n-1)ωs(θj,φj)]
(22)
另外,一般把某一特定距離單元內(nèi)的風(fēng)輪機(jī)回波對(duì)應(yīng)空時(shí)二維數(shù)據(jù)寫入一個(gè)N行K列的矩陣:
(23)
式中,N為陣元數(shù);K為脈沖數(shù)。通常為方便處理,把單距離單元的接收數(shù)據(jù)排成一個(gè)NK×1的列向量,即x=[x1,1,x2,1,…,xN,1,x1,2,x2,2,…,xN,2,…,x1,K,x2,K,…,xN,K]T。
2 機(jī)載陣列雷達(dá)風(fēng)輪機(jī)回波信號(hào)時(shí)頻分析
由所建立的機(jī)載陣列雷達(dá)風(fēng)輪機(jī)回波模型可知,其與地基雷達(dá)的風(fēng)輪機(jī)回波模型[15]不同之處在于,由于載機(jī)具有速度,在雷達(dá)與風(fēng)輪機(jī)徑向上的速度分量會(huì)產(chǎn)生額外的多普勒頻率。同時(shí),由于不同時(shí)刻下的載機(jī)與風(fēng)輪機(jī)的幾何關(guān)系不同,導(dǎo)致風(fēng)輪機(jī)與雷達(dá)的姿態(tài)(如方位角,俯仰角等)發(fā)生變化,進(jìn)而導(dǎo)致風(fēng)輪機(jī)回波信號(hào)的微動(dòng)特征更為復(fù)雜。
設(shè)載機(jī)的飛行高度為3 000 m,選取的風(fēng)輪機(jī)參數(shù)參照金風(fēng)82[20],葉片長(zhǎng)度為40.25 m,桅桿高度為70 m,葉片旋轉(zhuǎn)速度設(shè)定為15 r/min,風(fēng)輪機(jī)的旋轉(zhuǎn)面假定平行于圖1中所建立坐標(biāo)系的YOZ平面。雷達(dá)發(fā)射信號(hào)為L(zhǎng)FM,頻率為9.486 GHz,脈沖寬度為20 μs,脈沖帶寬為4.687 5 MHz,脈沖重復(fù)周期為100 μs,脈沖重復(fù)頻率(pulse repetition frequency,PRF)為10 kHz[12]。
本文采用STFT對(duì)風(fēng)輪機(jī)的回波信號(hào)進(jìn)行時(shí)頻分析[21],其定義為

(24)
式中,g(t)為窗函數(shù)。
假設(shè)一個(gè)相干處理時(shí)間(coherent-processing interval,CPI)內(nèi)脈沖數(shù)為64,載機(jī)速度為71 m/s,且在CPI內(nèi),雷達(dá)與風(fēng)輪機(jī)的相對(duì)幾何關(guān)系不變。
設(shè)定風(fēng)電場(chǎng)中風(fēng)輪機(jī)的方位角θ=0°,軸心坐標(biāo)為(0,10 000,-2 930)m,雷達(dá)位于坐標(biāo)原點(diǎn),LOS與風(fēng)輪機(jī)的旋轉(zhuǎn)面平行,風(fēng)輪機(jī)參考葉片夾角為γ=106°,得到風(fēng)輪機(jī)回波信號(hào)時(shí)頻分析結(jié)果,如圖2所示。

圖2 風(fēng)輪機(jī)回波時(shí)頻分析Fig.2 Time-frequency analysis of wind turbine echo
從圖2(a)可以看出,此時(shí)風(fēng)輪機(jī)某葉片與雷達(dá)LOS垂直且遠(yuǎn)離雷達(dá),能量分布集中,地基雷達(dá)與機(jī)載雷達(dá)的回波時(shí)頻譜中出現(xiàn)多普勒閃爍,如圖2(b)所示。不同之處在于:一方面,對(duì)于機(jī)載雷達(dá)來(lái)說(shuō),由于載機(jī)本身具有速度,回波信號(hào)被調(diào)制,風(fēng)輪機(jī)葉片回波產(chǎn)生的多普勒頻率在時(shí)頻譜上平移,同時(shí)由于葉片旋轉(zhuǎn)導(dǎo)致其對(duì)應(yīng)的回波在平移的同時(shí)產(chǎn)生頻譜展寬。另一方面,機(jī)載雷達(dá)的回波中具有地雜波,同樣被載機(jī)速度調(diào)制,能量在整個(gè)時(shí)頻分析觀察時(shí)間內(nèi)集中于載機(jī)速度所對(duì)應(yīng)的多普勒頻率附近。另外,在0.003 8 s附近,葉片旋轉(zhuǎn)產(chǎn)生的多普勒閃爍與地雜波能量疊加,使得功率歸一化后其他位置的歸一化功率降低。
經(jīng)推算可知,載機(jī)速度所產(chǎn)生的多普勒頻率ft為
(25)
單葉片葉尖回波所產(chǎn)生的最大多普勒頻率fWTmax為[15]
(26)

為便于分析不同照射條件下,風(fēng)輪機(jī)葉片的時(shí)頻譜特性,下面對(duì)只有風(fēng)輪機(jī)葉片的回波信號(hào)進(jìn)行時(shí)頻譜分析。
2.1 葉片夾角對(duì)風(fēng)輪機(jī)時(shí)頻譜的影響
設(shè)定風(fēng)輪機(jī)的方位角θ=0°,軸心坐標(biāo)為(0,10 000,-2 930)m,此時(shí)雷達(dá)LOS與風(fēng)輪機(jī)的旋轉(zhuǎn)面平行,改變風(fēng)輪機(jī)參考葉片與水平軸的夾角,得到不同葉片夾角的風(fēng)輪機(jī)回波信號(hào)分析結(jié)果,如圖3所示。由圖2和圖3可以看出,與地基雷達(dá)類似的是,在俯仰角和方位角相同的情況下,雷達(dá)掃描到風(fēng)輪機(jī)時(shí),由于葉片夾角的不同,導(dǎo)致葉片回波信號(hào)的能量分布不同。當(dāng)風(fēng)輪機(jī)某葉片與雷達(dá)LOS垂直時(shí),能量分布集中,時(shí)頻譜中出現(xiàn)多普勒閃爍。當(dāng)風(fēng)輪機(jī)3個(gè)葉片與雷達(dá)LOS均不垂直時(shí),能量分布較為分散。但是由于載機(jī)本身具有速度,風(fēng)輪機(jī)回波信號(hào)被調(diào)制,在時(shí)頻圖上表現(xiàn)為頻率搬移,且不同夾角下的搬移程度相同。由于仿真參數(shù)中的PRF相對(duì)較小,圖3時(shí)頻譜中都有頻率折疊的現(xiàn)象。
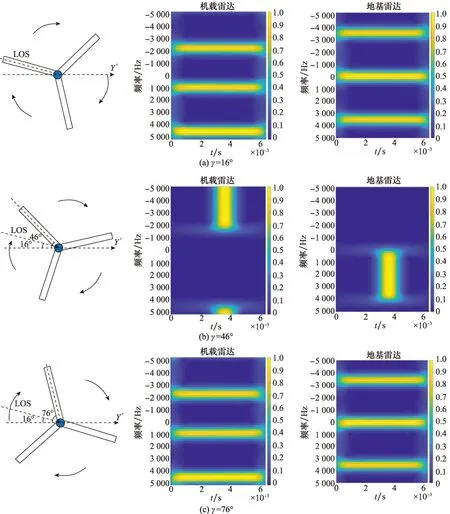
圖3 不同葉片夾角對(duì)時(shí)頻分析的影響Fig.3 Influence of different blade angles on time-frequency analysis
2.2 俯仰角和方位角對(duì)風(fēng)輪機(jī)時(shí)頻譜的影響
在假定風(fēng)輪機(jī)葉片與雷達(dá)LOS垂直的情況下,設(shè)定風(fēng)輪機(jī)的方位角θ=0°,軸心坐標(biāo)分別為(0,12 000,-2 930)m和(0,1 000,-2 930)m,得到不同俯仰角的風(fēng)輪機(jī)回波信號(hào)分析結(jié)果,如圖4所示。
由式(5)可知,徑向的載機(jī)速度分量會(huì)根據(jù)俯仰角的改變而改變,所產(chǎn)生的多普勒頻率也會(huì)隨之變化。由圖4可看出,在方位角θ=0°的情況下,雷達(dá)掃描到風(fēng)輪機(jī)時(shí),等效葉片長(zhǎng)度不變,垂直葉片轉(zhuǎn)動(dòng)產(chǎn)生的多普勒閃爍寬度相同,而由于載機(jī)運(yùn)動(dòng)所引起的頻譜平移程度會(huì)受到俯仰角的影響:俯仰角越大,平移程度越小;俯仰角越小,平移程度越大。
在假定風(fēng)輪機(jī)葉片與雷達(dá)LOS垂直的情況下,設(shè)定風(fēng)輪機(jī)相對(duì)載機(jī)的俯仰角φ=30°,方位角θ分別為37°和53°,軸心坐標(biāo)分別為(3 000,4 000,-2 930)m和(4 000,3 000,-2 930)m,得到不同方位角的風(fēng)輪機(jī)回波信號(hào)分析結(jié)果,如圖5所示。
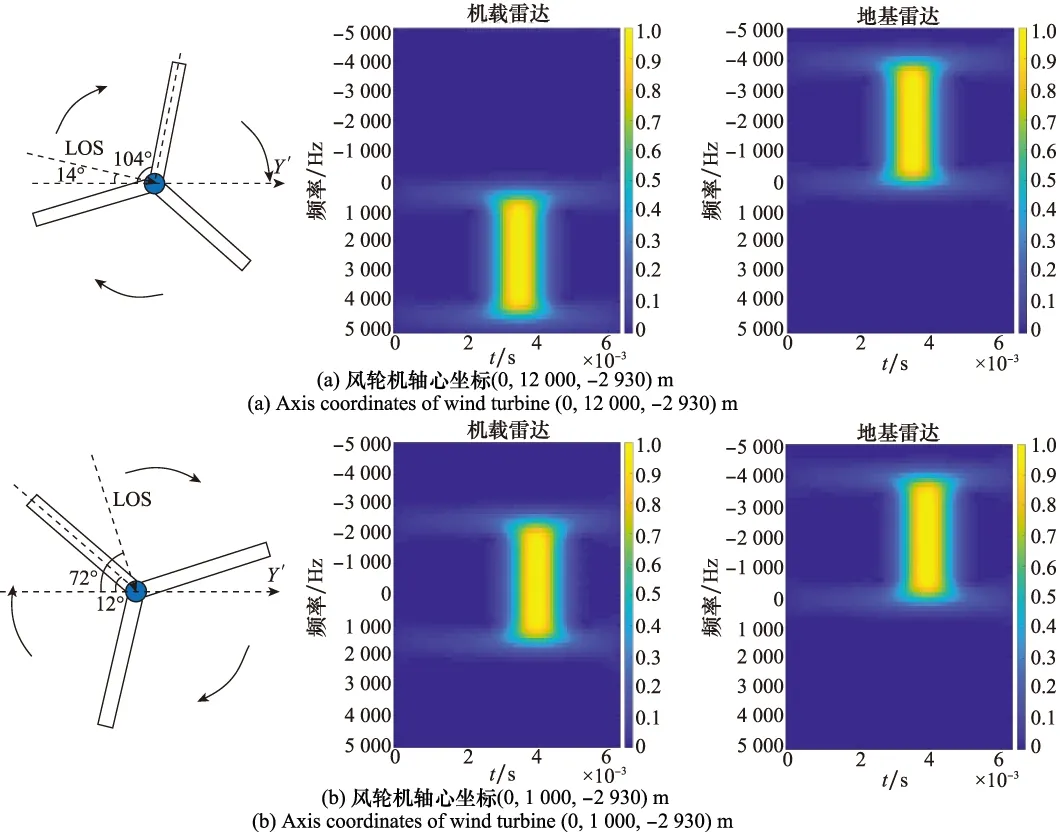
圖4 不同俯仰角對(duì)時(shí)頻分析的影響Fig.4 Influence of different pitch angles on time-frequency analysis

圖5 不同方位角對(duì)時(shí)頻分析的影響Fig.5 Influence of different azimuth angles on time-frequency analysis
同理,徑向的載機(jī)速度分量也會(huì)根據(jù)方位角的改變而改變,由圖5可看出,在俯仰角φ=30°的情況下,不同方位角風(fēng)輪機(jī)所對(duì)應(yīng)的時(shí)頻譜多普勒閃爍寬度不同,即葉片旋轉(zhuǎn)產(chǎn)生的最大多普勒頻率不同,且由于載機(jī)運(yùn)動(dòng)所引起的頻譜平移程度也會(huì)受到方位角的影響:方位角越小,閃爍寬度越寬,平移程度越大;方位角越大,閃爍寬度越窄,平移程度越小。
3 機(jī)載陣列雷達(dá)風(fēng)輪機(jī)回波信號(hào)距離-多普勒分析
對(duì)軸心坐標(biāo)為(0,10 000,-2 930) m的風(fēng)輪機(jī)進(jìn)行距離-多普勒分析如圖6所示。經(jīng)計(jì)算得出,風(fēng)輪機(jī)與機(jī)載雷達(dá)之間的距離為10 420 m,與實(shí)驗(yàn)結(jié)果相符。從圖6中可以看出,當(dāng)風(fēng)輪機(jī)旋轉(zhuǎn)狀態(tài)處于圖2(a),即葉片夾角γ=106°時(shí),風(fēng)輪機(jī)回波在頻域上連續(xù)展寬,反射率較強(qiáng),能量較大。另外,與第1節(jié)的時(shí)頻分析結(jié)果相同,由于載機(jī)本身的速度,風(fēng)輪機(jī)回波信號(hào)被調(diào)制,譜圖上的展寬在縱軸頻域上整體平移。由式(25)和式(26)可以得出,此風(fēng)輪機(jī)回波所對(duì)應(yīng)的ft和fWTmax分別為4 309 Hz和3 998 Hz,與距離-多普勒譜中的表現(xiàn)形式相符。
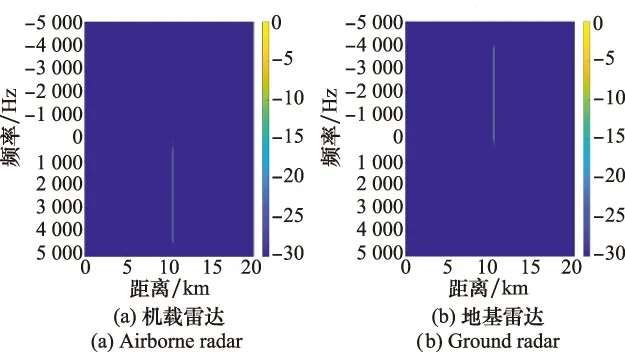
圖6 風(fēng)輪機(jī)回波距離-多普勒分析Fig.6 Range-Doppler analysis of wind turbine echo
同理可以證明,不同葉片夾角、俯仰角和方位角,對(duì)機(jī)載陣列雷達(dá)風(fēng)輪機(jī)回波信號(hào)的距離-多普勒特征的影響規(guī)律與時(shí)頻譜的影響規(guī)律相同:在載機(jī)飛行方向與風(fēng)輪機(jī)旋轉(zhuǎn)面平行的情況下,俯仰角和方位角越大,平移程度越小;俯仰角和方位角越小,平移程度越大。另外,方位角也會(huì)影響垂直葉片產(chǎn)生的頻譜展寬,方位角越小,展寬越大;方位角越大,展寬越小。
4 機(jī)載陣列雷達(dá)風(fēng)輪機(jī)回波信號(hào)空時(shí)譜分析
為了研究機(jī)載陣列雷達(dá)下風(fēng)輪機(jī)回波的空時(shí)域特征,設(shè)陣元數(shù)為32個(gè),風(fēng)輪機(jī)與雷達(dá)的其他參數(shù)不變,風(fēng)輪機(jī)的旋轉(zhuǎn)面假定平行于XOY面。
對(duì)風(fēng)輪機(jī)進(jìn)行空時(shí)二維譜分析,設(shè)定風(fēng)輪機(jī)軸心的位置為(0,10 000,-2 930)m,此時(shí)雷達(dá)LOS與風(fēng)輪機(jī)的旋轉(zhuǎn)面平行,風(fēng)輪機(jī)參考葉片與水平軸的葉片夾角為106°(見(jiàn)圖2(a)),歸一化處理結(jié)果如圖7所示。
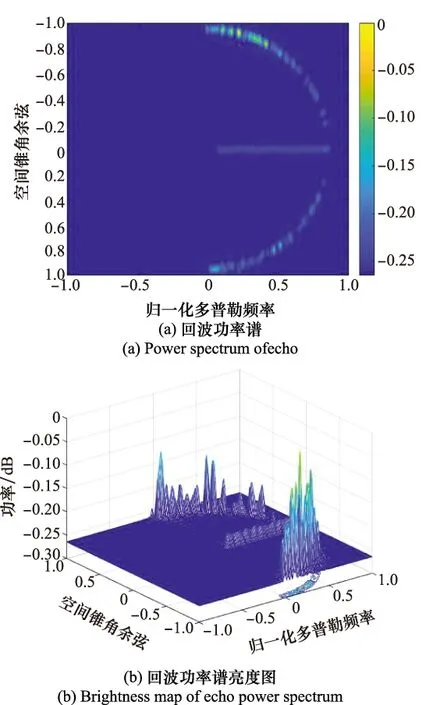
圖7 回波空時(shí)譜(γ=106°)Fig.7 Space-time spectrum of echo (γ=106°)
仿真實(shí)驗(yàn)中,風(fēng)輪機(jī)雜波對(duì)應(yīng)的雜噪比為32 dB,地雜波對(duì)應(yīng)的雜噪比為40 dB。由圖7可以看出,地雜波在空時(shí)譜中表現(xiàn)為橢圓形的分布(天線陣列軸線與載機(jī)航向垂直,由空域錐角與多普勒頻率之間的關(guān)系可知,此時(shí)雜波分布為正橢圓),而當(dāng)風(fēng)輪機(jī)的某一葉片與雷達(dá)LOS垂直時(shí),風(fēng)輪機(jī)回波在多普勒域存在明顯展寬,總體表現(xiàn)為一條“窄帶”。
由風(fēng)輪機(jī)的位置和式(10)可知,其空間角余弦cosα=0,與圖7(a)中“窄帶”在空域的位置相符。另外由式(25)和式(26)可知,該風(fēng)輪機(jī)回波所對(duì)應(yīng)的ft=4 309 Hz,葉片轉(zhuǎn)動(dòng)產(chǎn)生的fWTmax=3 998 Hz,且由于此刻垂直葉片遠(yuǎn)離雷達(dá)旋轉(zhuǎn),所以該情況下的風(fēng)輪機(jī)回波的最小多普勒頻率和最大多普勒頻率應(yīng)為fdmin=ft-fWTmax=311 Hz和fdmax=ft=4 309 Hz。根據(jù)歸一化多普勒頻率2fd/PRF可知,風(fēng)輪機(jī)回波所對(duì)應(yīng)的最小歸一化多普勒頻率和最大歸一化多普勒頻率應(yīng)為0.062 2和0.861 8,與空時(shí)二維譜中“窄帶”在多普勒域的擴(kuò)展情況相符,理論分析與實(shí)驗(yàn)結(jié)果一致。
對(duì)于機(jī)載前向陣來(lái)說(shuō),地雜波在空時(shí)譜上的分布是固定的,但風(fēng)輪機(jī)雜波會(huì)在不同的參數(shù)下與前向陣的雜波帶呈現(xiàn)不同的分布。設(shè)定風(fēng)輪機(jī)參考葉片夾角為46°,結(jié)果如圖8所示。
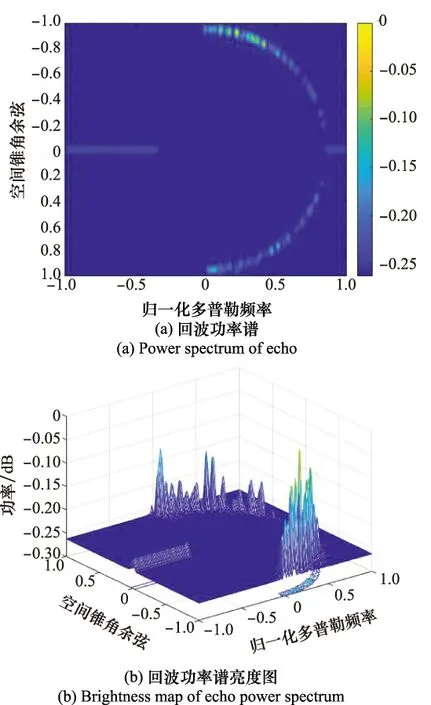
圖8 回波空時(shí)譜(γ=46°)Fig.8 Space-time spectrum of echo (γ=46°)
由圖8可以看出,當(dāng)葉片夾角為46°時(shí),此刻與雷達(dá)LOS垂直的風(fēng)輪機(jī)葉片朝向雷達(dá)旋轉(zhuǎn),產(chǎn)生正向的多普勒頻率。風(fēng)輪機(jī)“窄帶”由歸一化多普勒頻率0.861 8處向正向擴(kuò)展,擴(kuò)展寬度與葉片夾角為106°時(shí)相同。另外,由于PRF的限制,造成多普勒頻率折疊。由此可見(jiàn),對(duì)于不同參數(shù)下的風(fēng)輪機(jī)葉片,其回波在空時(shí)譜中的表現(xiàn)形式不同。
為便于分析不同照射條件下,風(fēng)輪機(jī)葉片的空時(shí)譜特性,下面對(duì)只有風(fēng)輪機(jī)葉片的回波信號(hào)進(jìn)行空時(shí)譜分析。
4.1 葉片夾角對(duì)空時(shí)二維譜的影響
設(shè)定風(fēng)輪機(jī)的方位角θ=0°,軸心坐標(biāo)為(0,10 000,-2 930)m,此時(shí)雷達(dá)LOS與風(fēng)輪機(jī)的旋轉(zhuǎn)面平行,改變風(fēng)輪機(jī)參考葉片與水平軸的夾角,與圖3一致,得到不同葉片夾角的風(fēng)輪機(jī)回波信號(hào)空時(shí)譜,如圖9所示。
由圖9可以看出,隨著風(fēng)輪機(jī)葉片夾角的不同,風(fēng)輪機(jī)回波在空時(shí)二維譜中所表現(xiàn)的形式也隨之不同:當(dāng)雷達(dá)LOS與風(fēng)輪機(jī)某一葉片垂直時(shí)(見(jiàn)圖7(a)和圖9(b)),風(fēng)輪機(jī)回波在多普勒域存在明顯展寬,表現(xiàn)為一條“窄帶”,且葉片遠(yuǎn)離雷達(dá)和朝向雷達(dá)時(shí)的“窄帶”關(guān)于載機(jī)速度所對(duì)應(yīng)的歸一化多普勒頻率點(diǎn)對(duì)稱;當(dāng)雷達(dá)LOS與風(fēng)輪機(jī)各葉片不垂直時(shí)(見(jiàn)圖9(a)和圖9(c)),由于散射點(diǎn)回波能量相消,在空時(shí)二維譜中沿多普勒域能量發(fā)散,能量主要集中在葉尖所產(chǎn)生多普勒頻率上,同時(shí)由于PRF的限制,圖9空時(shí)譜具有多普勒頻率折疊的現(xiàn)象。
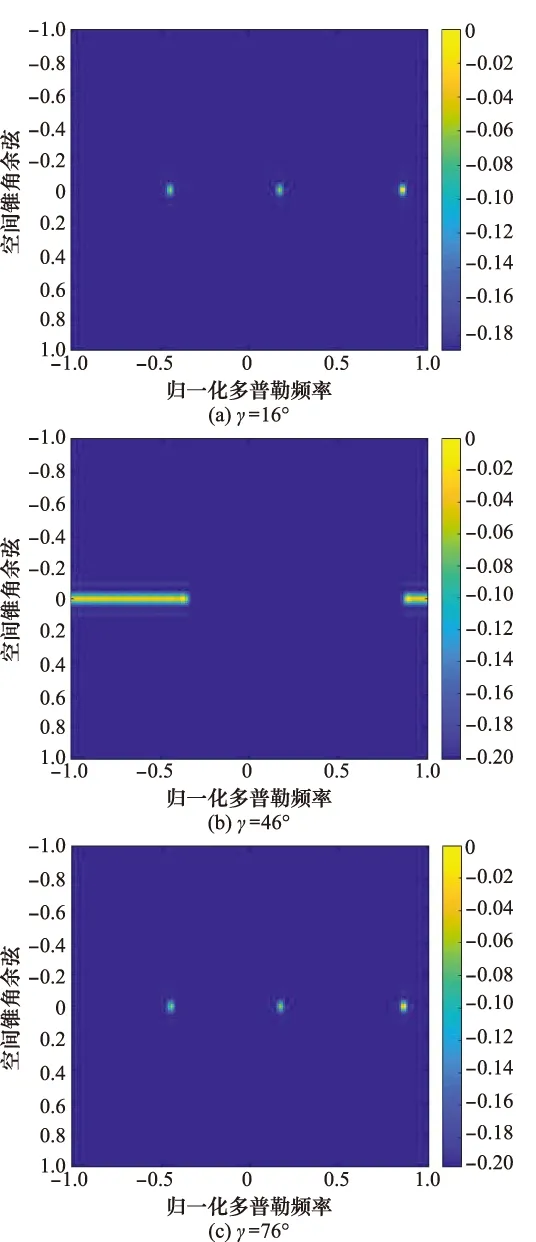
圖9 不同葉片夾角對(duì)空時(shí)二維譜的影響Fig.9 Influence of different blade angles on space-time two-dimensional spectrum
4.2 俯仰角和方位角對(duì)空時(shí)二維譜的影響
在假定風(fēng)輪機(jī)葉片與雷達(dá)LOS垂直的情況下,設(shè)定風(fēng)輪機(jī)的方位角θ=0°,軸心坐標(biāo)分別為(0,12 000,-2 930)m和(0,1 000,-2 930)m,此時(shí)雷達(dá)LOS與風(fēng)輪機(jī)的旋轉(zhuǎn)面平行,得到不同俯仰角風(fēng)輪機(jī)回波信號(hào)的空時(shí)譜,如圖10所示。
在假定風(fēng)輪機(jī)葉片與雷達(dá)LOS垂直的情況下,設(shè)定風(fēng)輪機(jī)相對(duì)載機(jī)的俯仰角φ=30°,方位角分別為37°和53°,軸心坐標(biāo)分別為(3 000,4 000,-2 930)m和(4 000,3 000,-2 930)m,得到不同方位角風(fēng)輪機(jī)回波信號(hào)的空時(shí)譜,如圖11所示。
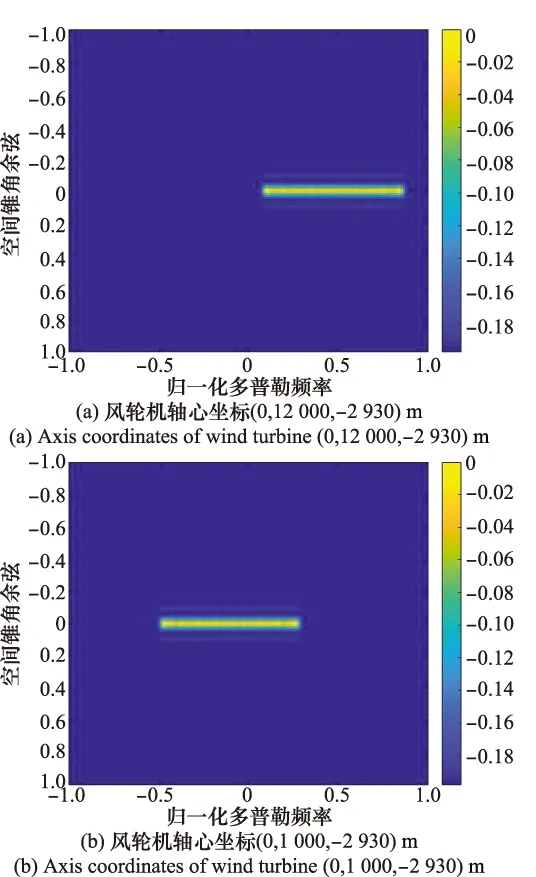
圖10 不同俯仰角對(duì)空時(shí)二維譜的影響Fig.10 Influence of different pitch angles on space-time two-dimensional spectrum
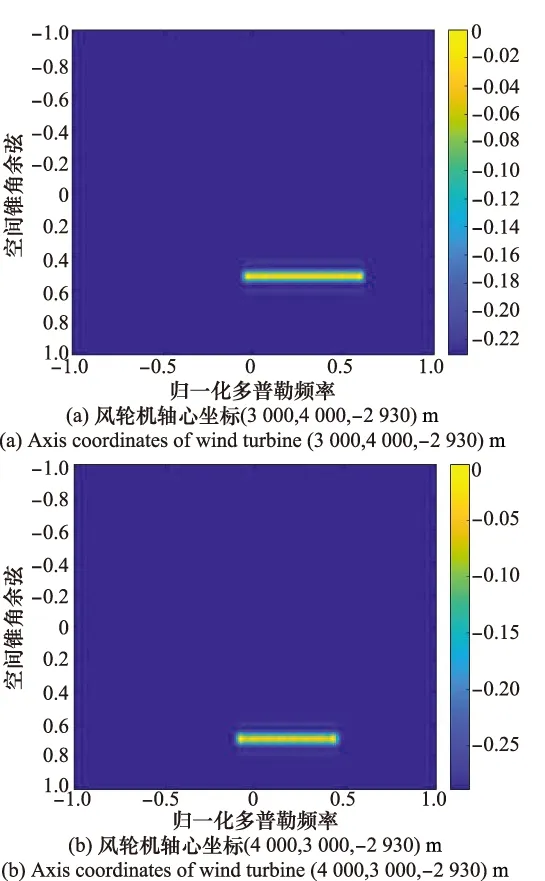
圖11 不同方位角對(duì)空時(shí)二維譜的影響Fig.11 Influence of different azimuth angles on space-time two-dimensional spectrum
由式(10)可知,當(dāng)方位角θ=0°時(shí),圖10(a)和圖10(b)中風(fēng)輪機(jī)回波的能量都集中在cosα=0附近,而兩者葉片轉(zhuǎn)動(dòng)產(chǎn)生的最大多普勒頻率相同,所對(duì)應(yīng)的“窄帶”寬度相同。不同之處在于由于俯仰角不一樣,載機(jī)速度在風(fēng)輪機(jī)徑向方向上的分量不一樣,影響“窄帶”在多普勒域的位置。當(dāng)俯仰角φ=30°時(shí),風(fēng)輪機(jī)的空間錐角余弦值隨著方位角變化而變化,方位角越大,cosα值越大,如圖11所示。另外,由于兩位置風(fēng)輪機(jī)的等效葉片長(zhǎng)度不同,轉(zhuǎn)動(dòng)產(chǎn)生的最大多普勒頻率不同,所對(duì)應(yīng)的“窄帶”寬度有所差異,方位角越大,“窄帶”寬度越小。
5 結(jié) 論
本文以風(fēng)輪機(jī)為研究對(duì)象,建立了對(duì)于機(jī)載陣列雷達(dá)任一觀測(cè)點(diǎn)處的風(fēng)輪機(jī)回波信號(hào)模型,從時(shí)頻域、距離-多普勒域和空時(shí)域?qū)υ撉闆r下的風(fēng)輪機(jī)回波信號(hào)微動(dòng)特征進(jìn)行分析,結(jié)果如下。
(1) 風(fēng)輪機(jī)回波信號(hào)在機(jī)載平臺(tái)下的表現(xiàn)形式與地基雷達(dá)不同,主要區(qū)別在于,地基雷達(dá)與風(fēng)輪機(jī)的位置都是固定的,風(fēng)輪機(jī)的位置參數(shù)不變。而對(duì)于機(jī)載雷達(dá)來(lái)說(shuō),由于雷達(dá)平臺(tái)的運(yùn)動(dòng),風(fēng)輪機(jī)相對(duì)載機(jī)的方位角和俯仰角信息會(huì)不斷改變,其微多普勒特征也會(huì)隨之變化。
(2) 雷達(dá)平臺(tái)自身的速度會(huì)使風(fēng)輪機(jī)的回波信號(hào)得到調(diào)制,使得風(fēng)輪機(jī)葉片轉(zhuǎn)動(dòng)產(chǎn)生的多普勒頻率在時(shí)頻譜、距離-多普勒譜和空時(shí)譜的多普勒域整體平移,而俯仰角和方位角會(huì)影響平移的程度,在0°~90°的范圍內(nèi),俯仰角和方位角越大,平移程度越小;俯仰角和方位角越小,平移程度越大。
(3) 除平臺(tái)速度會(huì)對(duì)回波信號(hào)調(diào)制,影響其在時(shí)頻譜中的表現(xiàn)形式外,風(fēng)輪機(jī)相對(duì)平臺(tái)的位置和葉片夾角也會(huì)影響風(fēng)輪機(jī)回波信號(hào)的時(shí)頻特征。當(dāng)平臺(tái)的運(yùn)動(dòng)方向與風(fēng)輪機(jī)的旋轉(zhuǎn)面平行時(shí),風(fēng)輪機(jī)葉片與雷達(dá)LOS非垂直情況下的回波信號(hào)在時(shí)頻譜中的能量分布比較分散,而當(dāng)風(fēng)輪機(jī)葉片夾角改變使得葉片與雷達(dá)LOS垂直時(shí),能量分布集中,時(shí)頻譜中出現(xiàn)多普勒閃爍,方位角會(huì)影響閃爍的寬度:方位角越小,閃爍寬度越寬;方位角越大,閃爍寬度越窄。
(4) 當(dāng)平臺(tái)的運(yùn)動(dòng)方向與風(fēng)輪機(jī)的旋轉(zhuǎn)面平行時(shí),不同葉片夾角的風(fēng)輪機(jī)回波在空時(shí)二維譜中的表現(xiàn)形式不同。葉片與雷達(dá)LOS垂直時(shí),其頻譜特征表現(xiàn)為一條“窄帶”;葉片與雷達(dá)LOS不垂直時(shí),其頻譜能量較為發(fā)散,主要由各葉片的葉尖產(chǎn)生。俯仰角固定的情況下,風(fēng)輪機(jī)相對(duì)雷達(dá)的方位角會(huì)影響回波最大多普勒頻率及空域角頻率,在0°~90°的范圍內(nèi),方位角越大,空間錐角余弦值越大,最大多普勒頻率越小;方位角越小,空間錐角余弦值越小,最大多普勒頻率越大。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國(guó)生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(hào)(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(hào)(2018年2期)2018-04-18 12:18:10
鐵道通信信號(hào)(2016年11期)2016-06-01 12:11:32
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25
中國(guó)病理生理雜志(2015年8期)2015-12-21 12:38:06