風光混合驅動長航程無人海空立體探測船研發
2021-03-02 13:30:22姚天成趙永生王紅雨何炎平丁子龍池哲瀛蔡煒鍇
上海交通大學學報 2021年2期
姚天成, 趙永生, 王紅雨, 何炎平, 丁子龍, 池哲瀛, 蔡煒鍇
(上海交通大學 a. 船舶海洋與建筑工程學院; b. 電子信息與電氣工程學院, 上海 200240)
信息技術和控制技術的快速發展使人工智能和無人系統成為當前研究的熱點領域,為海洋調查裝備的發展提供了新的思路.無人船(USV)以船形浮式平臺為載體,是一種可執行某類指定任務,并基于任務目的進行功能、性能設計的多功能水面機器人.作為一種新型的無人搭載平臺,與傳統載人調查船相比,無人船優勢在于靈活機動[1],安全、隱蔽性強[2],可以在海洋中承擔長時間、大范圍、低成本的海洋監測任務[3-4],有廣闊的應用前景[5-7].
現階段大部分USV均使用燃油和電池作為能源[8],自身無法實現能源動力補給,不能滿足長期海洋觀測的需求.在環境信息探測感知方面,現有的無人船由于傳感器距離水面高度較低,易受到波浪抨擊等復雜海洋環境的干擾,從而導致感知受限等問題,且視覺設備往往存在探頭視野受限現象[9-11].
針對上述問題,本文研發了CWind無人船,為風能太陽能混合驅動的長航程無人海空立體探測船,以風能和太陽能作為驅動能源,續航持久.同時,配備了艇載系留無人機探測系統,感知范圍廣、精度高、視野靈活,可用于長周期的海洋大范圍環境立體探測,從而實現海空一體的特定海域大面積巡航和定點觀測,并能遠程傳輸探測信息.
1 CWind系統組成
CWind無人船主要由船體、風能太陽能混合動力系統、無人機(UAV)桅桿系統和海空立體探測系統四大部分組成.表1為主要技術參數,圖1為CWind概念示意圖.
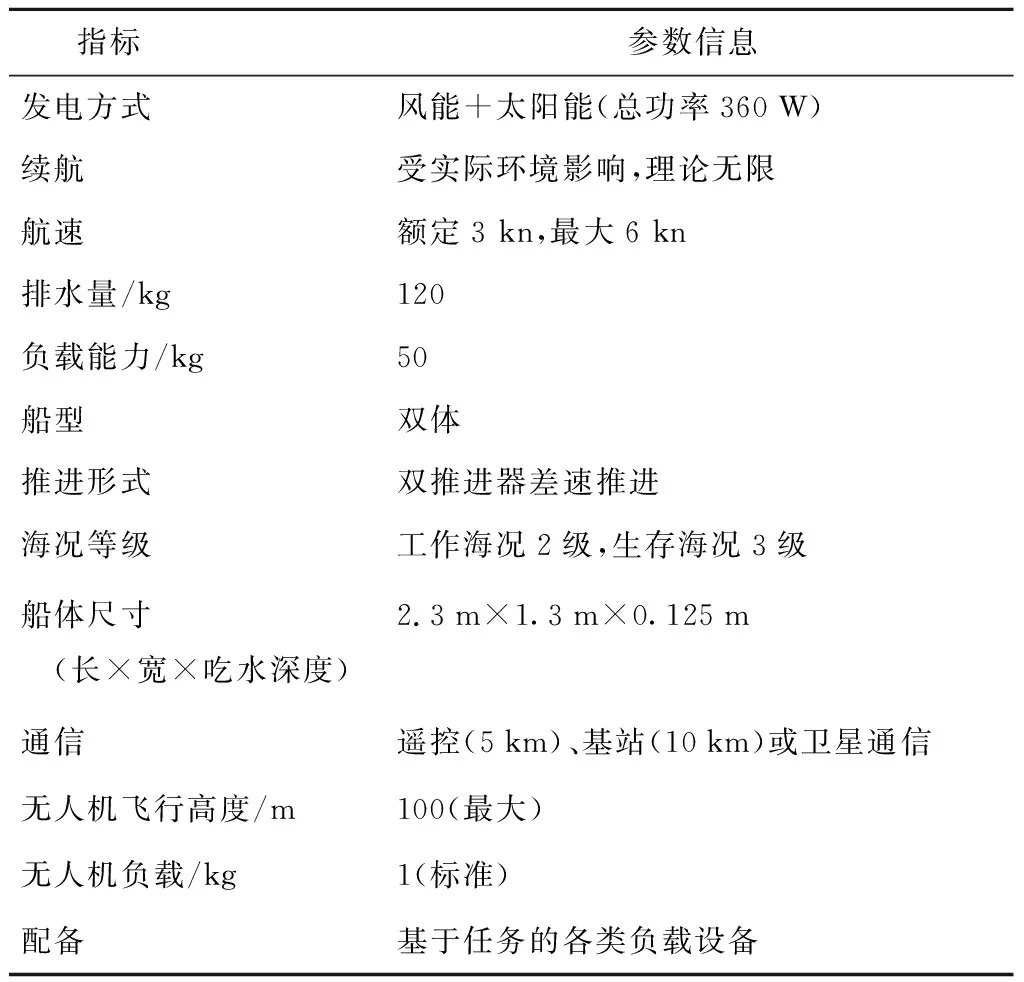
表1 CWind主要技術參數Tab.1 Main technical parameters of CWind
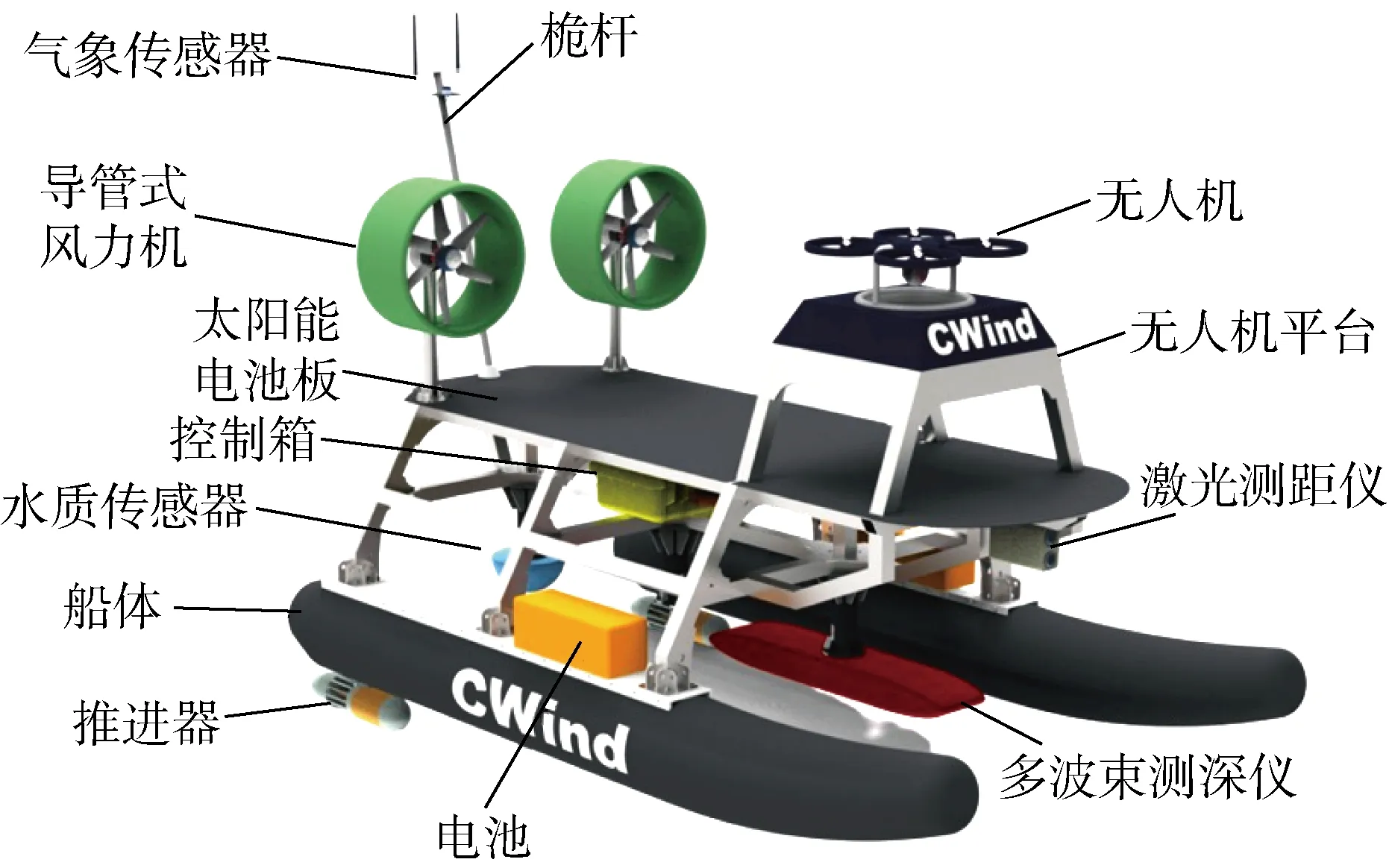
圖1 CWind主要系統組成Fig.1 Main system composition of CWind
在船體設計上,CWind采用低速高性能雙體船型,具備良好的初始穩性,結合可調節型負載系統,可以進一步提升無人船的穩性以應對更為復雜惡劣的海洋環境.
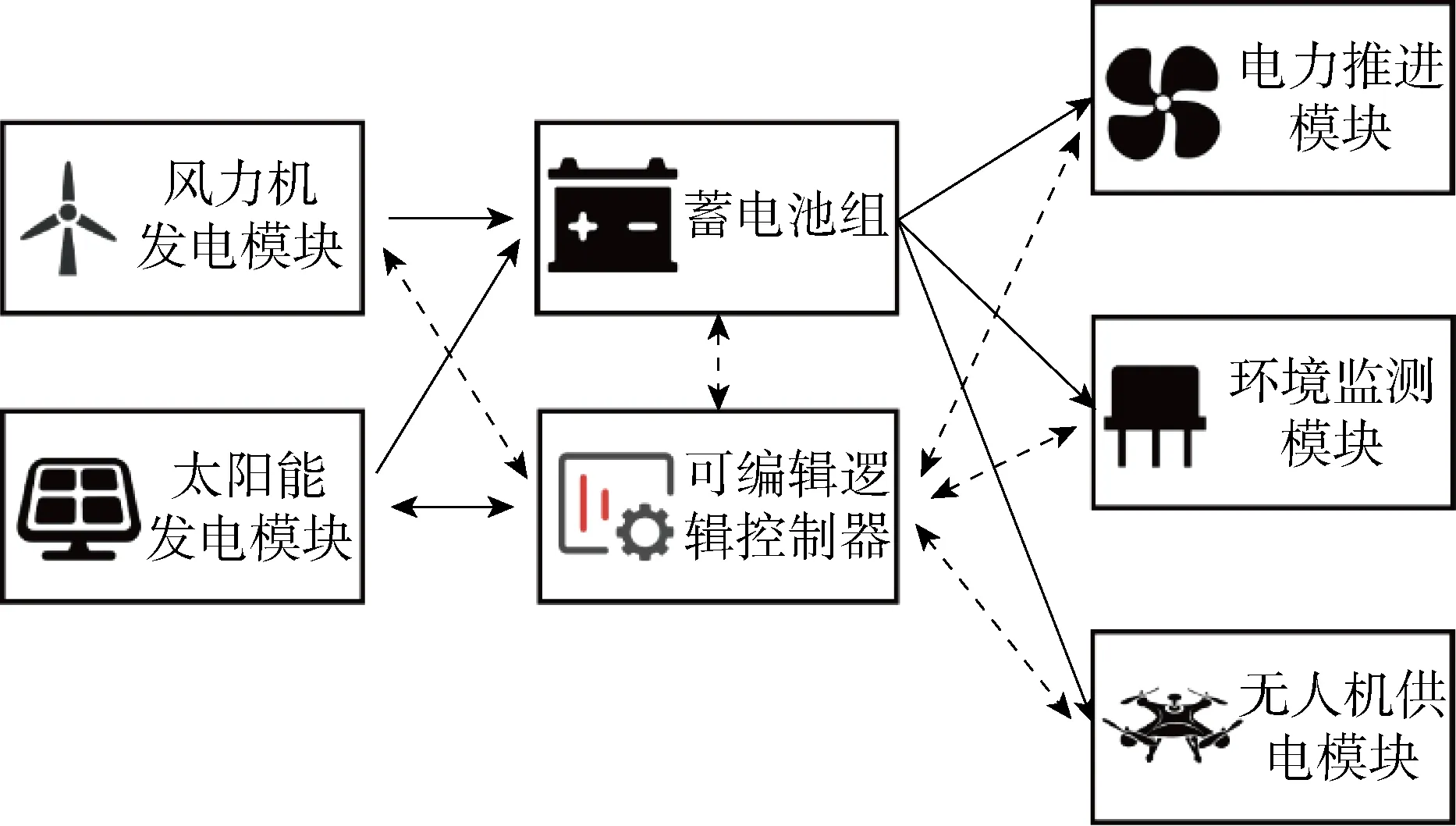
圖2 CWind混合動力系統Fig.2 Hybrid power system of CWind
風能太陽能混合動力系統如圖2所示,主要包括升降式的導管型高效低風速風力機、可展式的太陽能光伏發電系統、鋰電池儲能單元,以及能量管理控制器.在能量管理控制器的統一管控下,風力機和太陽能光伏發電系統對船載鋰電池組進行充電,鋰電池組對船載電力推進系統、探測系統和系留無人機進行供電.采用可再生能源混合配置,可克服單一能源供電的不穩定性,提高供電效率.
CWind的無人機桅桿系統如圖3所示,由多旋翼系留無人機、線纜自適應收放絞車和艇載系留無人機起降平臺組成.系留無人機采用無人船載電源通過系留線纜供電,可長時間滯空懸停發揮機動性優勢,參數見表2.系留無人機上搭載了視覺和激光雷達等設備,通過GPS、超聲波測距儀、陀螺儀和加速度計等實現與無人船的同步巡航;同時,機載視覺設備采集的高清視頻等數據可以通過系留線纜內置的光纖回傳到無人船,具有空中作業時間長、數據傳輸帶寬大的優勢.無人機桅桿系統大幅提升了無人船的態勢感知能力,相當于無人船的一雙“天眼”.
CWind的海空立體探測系統如圖4所示,利用多傳感器信息融合技術,通過整合高分辨率攝像頭、超聲波氣象站、激光雷達、毫米波雷達和多波束測深儀等船載和機載傳感器信息,實現對環境信息的可靠感知,提升無人船在復雜環境下對環境探測與識別的準確性,避免系統因單傳感器受環境強干擾而做出錯誤決策.設計基于“即插即用”和模塊化設計概念,通過在標準平臺上集成不同的功能模塊以實現多樣化作業任務,具有較強的重配置性、擴展性和多功能性,從而滿足用戶任務需求,如水文測量、氣象監測、海洋生物觀測等.

圖3 無人機桅桿系統Fig.3 UAV mast system
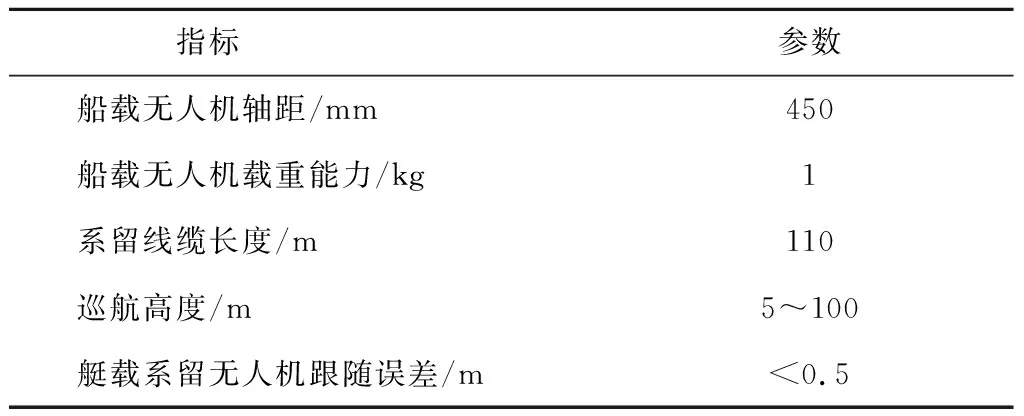
表2 無人機主要參數Tab.2 Main parameters of UAV
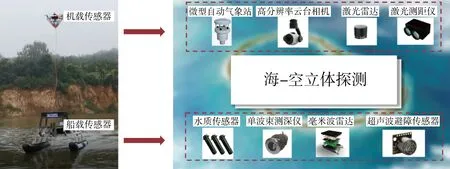
圖4 海空立體探測系統Fig.4 Ocean-air stereoscopic detection system
2 關鍵技術
CWind無人探測船的優勢在于其長航程續航能力和多維立體的海空立體探測能力,開發中采用了多項關鍵技術.
2.1 艇載系留無人機自主降落控制
無人船海上航行作業時在隨機風、浪、流載荷的作用下始終處于六自由度運動中,無人機自主著艦難度高,因此無人機的精確自主降落是實現無人機-無人船協同控制的關鍵[12-14],尤其當無人船處于巡航狀態時,無人機的精準降落更具挑戰性.
視覺導航技術是目前無人機自主著艦的主流方法[15-16],然而惡劣海上天氣條件下,圖像識別精度顯著降低,無人機完成自主降落十分困難.無人機自主降落如圖5所示,降落過程中無人船的六自由度運動包含縱蕩(Surge)、橫蕩(Sway)、垂蕩(Heave)、橫搖(Roll)、縱搖(Pitch)和首搖(Yaw).
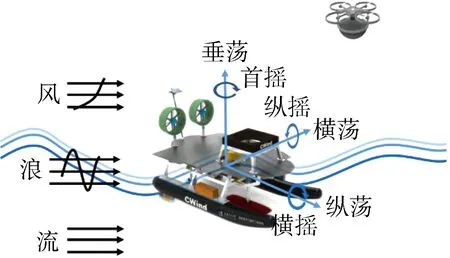
圖5 無人機在無人船六自由度運動條件下的自主降落Fig.5 Autonomous landing of UAV under six-degree-freedom USV motion condition
針對無人機精準自主著艦,開發了系纜主動牽引降落技術和自適應對接平臺,如圖6所示.在正常飛行作業期間,無人機會充分發揮其機動性優勢進行較大范圍的機動航行,同時利用線纜自適應收放絞車實現線纜收放控制,保證外放長度維持在一個合適的水平,減小其對系留無人機飛行機動性帶來的影響.在艇載系留無人機降落階段,結合基于線纜主動牽引的自主起降控制方法(見圖7),無人機旋翼升力自適應平衡回收的線纜對無人機所施加拉力的垂向分量,同時維持無人機和無人船的相對水平方位,保證了艇載系留無人機在有限的降落平臺面積上可以安全地在線纜的引導下降落于艇載系留無人機起降平臺.
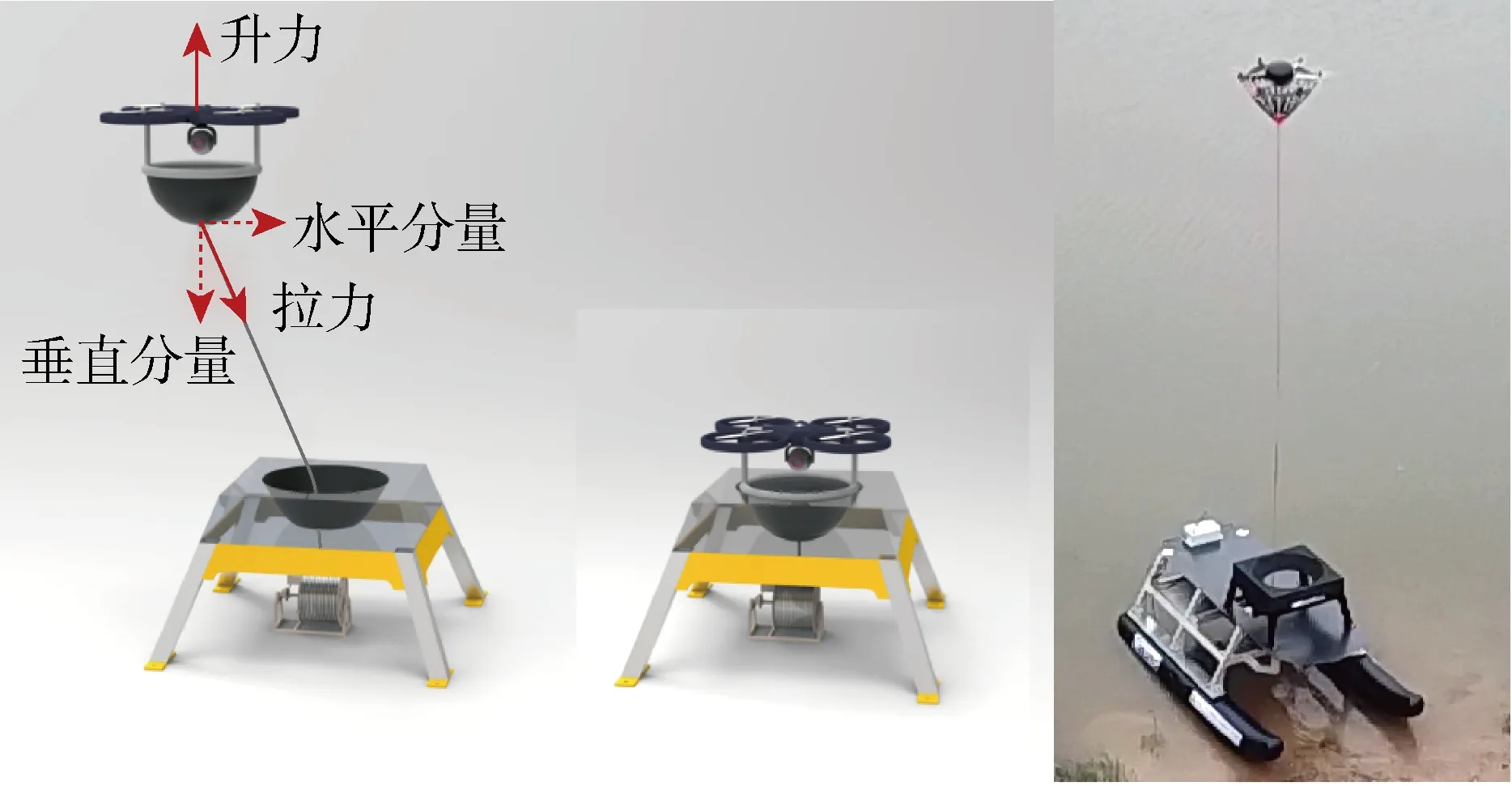
圖6 無人機降落控制原理Fig.6 Landing control principle of UAV
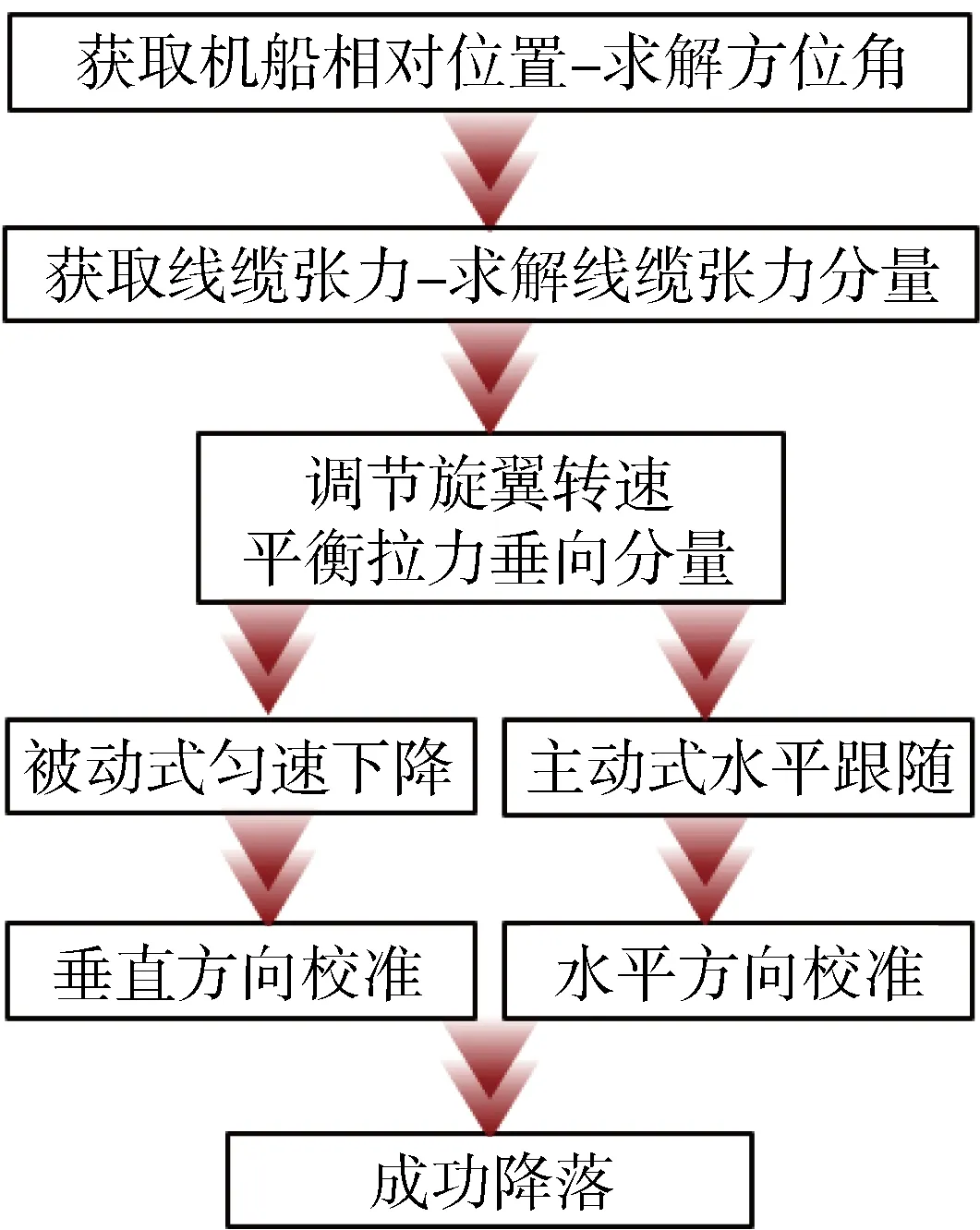
圖7 無人機自主降落控制流程Fig.7 Autonomous landing control of UAV
2.2 導管式高效低風速風力機
導管式高效低風速風力機設計是研發過程中的另一項關鍵技術.目前,小型垂直軸和水平軸風力機在船舶上均有應用:垂直軸風力機雖然具有萬向受風優點,但存在發電效率低的缺點(功率系數約0.15);水平軸風力機發電效率雖有所提高(功率系數約0.25),但存在啟動風速高問題.為此,對傳統三葉片小型風力機的葉片數量、葉片外形進行了優化設計[17],開發了具有整流和增速作用的全風向導流管裝置,如圖8所示.
為評估導流管裝置對風力機氣動性能和發電效率的影響,基于計算流體力學(CFD)方法對風力機在有/無導管兩種情況下進行了模擬.計算采用隱式差分格式進行三維非定常模擬,為節省計算網格將計算域設為圓柱形,并對風力機旋轉區域及尾流區域進行了加密,網格總數約為570萬.計算域中風機上游設為速度入口,下游設為壓力出口,弧面設為對稱面,采用滑移網格模擬風機旋轉,如圖9所示.
圖10所示為風力機在有/無導管兩種情況下的尾渦對比,導管剖面設計為機翼形狀,導管和葉尖之間空隙極小,可顯著降低繞流損失并限制尾流收縮,減少能量損失,提高發電效率.在3種典型工況下,風力機在有無導管時的計算結果如表3所示.計算結果表明新型導管式風力機的啟動風速約3 m/s,且相對單獨風力機工況獲得了更高的功率系數.該導管式風力機結構上均采用輕質材料加工制造,所需的布置空間小,且能夠24 h全天候工作,特別適用于為遠海無人平臺提供電力.
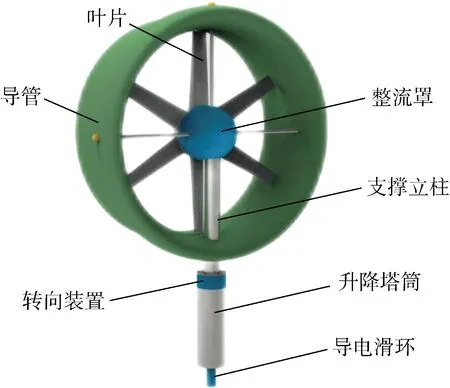
圖8 導管式小型風力機Fig.8 Small ducted wind turbine
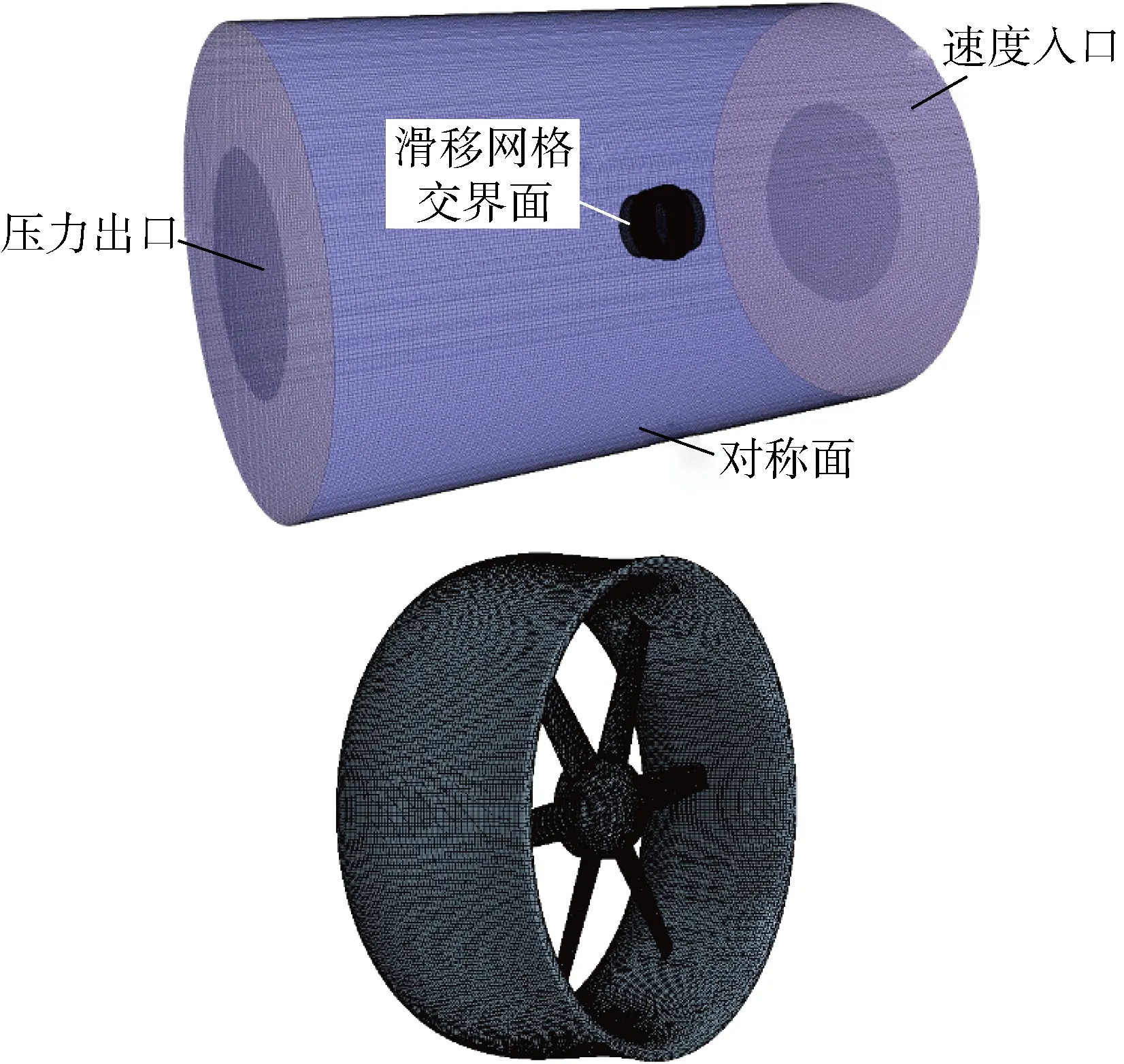
圖9 計算域及導管式風力機表面網格Fig.9 Computational domain and surface mesh of ducted wind turbine
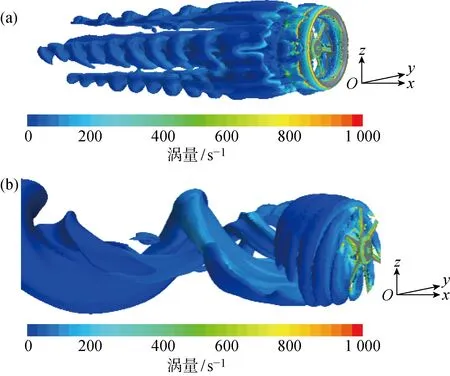
圖10 風力機尾渦對比Fig.10 Comparison of trailing vortex of wind turbine

表3 CFD計算工況及結果Tab.3 Calculation conditions and results based on CFD
3 結語
CWind無人海空立體探測船采用風能和太陽能混合驅動,解決了無人船長航程作業缺少能源補給難題,進一步通過搭載系留無人機解決了傳統無人船在海洋環境下水面感知能力受限的瓶頸問題,具有優良的續航能力和強大的海空探測能力,未來應用場景包括以下幾個方面.
(1) 遠海島礁海空立體環境探測.我國南沙島礁海流潮流特點復雜,暗礁眾多,水深變化大,水動力環境復雜,采用傳統調查技術在該區域工作效率低、風險大且耗費大量人力和物力.采用CWind無人船,可實現遠海島礁海域的海空立體探測,快速獲取島礁地表數據和水深、水下地形等基礎數據.
(2) 海洋中尺度渦連續觀測.目前水下滑翔機、波浪滑翔機及ARGO浮標等平臺在中尺度渦觀測能力上存在不足.CWind為長航程無人船,通過搭載自動水下剖面觀測平臺、自動氣象站,可實現低成本、高精度的大洋中尺度渦的觀測,獲取高分辨率的中尺度渦立體海洋要素.
(3) 遠海氣象探測.當前遠海氣象探測主要依靠衛星遙感技術,不能直接測得精確的氣象參數.CWind無人船可穿越臺風眼,結合艇載系留無人機,“看清”臺風內部結構,實時獲得臺風內部風場、溫度場和濕度場等各項探測數據,為臺風數值預報和機理研究提供可靠的實測資料.
(4) 深遠海域海洋動物種群觀測.CWind為無人船和無人機立體觀測系統,可以在不驚擾海洋動物(如鯨魚、海豚等)的前提下收集資料,無需借助昂貴的直升機和固定翼飛機進行觀測.