新一代運載火箭12點調平控制策略設計及優化
2021-03-01 11:29:10劉麗媛李道平鄭國昆李靜妍
導彈與航天運載技術 2021年1期
關鍵詞:動作
劉麗媛,邢 然,李道平,鄭國昆,李靜妍
(北京航天發射技術研究所,北京,100076)
0 引 言
傳統的發射平臺一般采用4點支撐方式,進行垂直度調整,新一代運載火箭采用12點(以下簡稱多點)支撐的平臺,對平臺支撐物的垂直度調整控制提出了更高精度的要求。多點調平的動作狀態較為復雜,主要包括:4點同升同降,12點同升同降,4點對角垂調,12點對角垂調。在調平過程中要滿足支臂高度、支臂載荷和水平儀監測等多條件約束,增加了控制難度,由于無成熟技術借鑒,需對多點調平控制策略進行研究,尋求多條件的相互協調。
根據需求,調平時跟隨精度和載荷控制要求在一定范圍內,以保證系統總體的安全性。基于試驗需要得到:非線性載荷的變化規律,進行支臂載荷調整時對其它支臂載荷的影響情況,掌握載荷調整控制方法,為研究多點調平的控制方法,進行控制流程的優化提供依據。
本文通過理論分析,并結合試驗的具體情況,對多點調平影響因素與控制算法進行了探討,以實現12點平面下的快速調平閉環控制。
1 理想的調平過程及條件
平臺的12個支撐點分布示意如圖1所示。

圖1 12個支撐點分布示意Fig.1 Distribution Diagram of 12 Support Points
多點調平是希望通過程序的計算控制實現12點1個平面的理想狀態。在M、M1、M2、M3、M45個位置分別安裝1個水平測量儀,由5個測量數據計算加權平均值,根據加權平均值進行水平面的調整。
12點調平的主要動作包括:4個主支承臂同升同降;12個支臂同升同降;4個主支承臂4點對角升降調平(1個主支承臂上升,同時其對角主支承臂下降,即1升1降);12點支臂升降調平(1個象限內所有支臂上升,同時其對角象限所有支臂下降,即5升5降,各支臂動作過程中保持平臺支撐物作平面翻轉運動)。最終,希望通過各個動作的調整,使得12點處于同一平面,并在調整過程中滿足以下條件:
a)4個主支承臂同升同降時:中間4個主支承臂以I象限主支承臂為基準,在同升過程中其它3個主支承臂與其高度差不超過±0.5 mm,受力接近極限值時暫停,進行載荷調整,載荷調整好后繼續按上述要求同升,要求全過程4個主支承臂位移差小于±0.5 mm,否則報警停止。
b)12個支臂同升同降時:要求與4點情況相同。
c)4個主支承臂對角升降時(以Ⅰ、Ⅲ象限對角升降為例):各支臂動作過程中,主支承臂Ⅰ為動作基準,主支承臂Ⅲ與其位移偏差小于±0.5 mm。載荷出現偏差時暫停,進行調整后繼續調平。要求全過程4個主支承臂位移差小于±0.5 mm,否則報警,程序停止。
d)12個支臂對角升降時(以Ⅰ、Ⅲ象限對角升降為例),各支臂的支臂速比關系理論位移,如圖2所示。
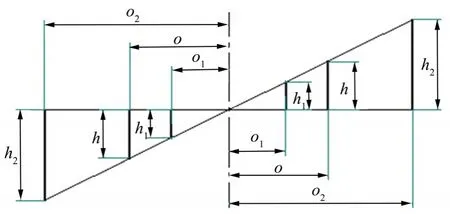
圖2 支臂運動理論位移示意Fig.2 Theoretical Displacement Diagram of Arm Motion
以Ⅰ象限主支承臂為基準,Ⅲ象限主支承臂與其進行反向動作。動作規律是遠端輔助支承臂速度∶主支承臂速度∶近端輔助支承臂速度=1507.6∶850∶443.2,轉換為相應位移比率是遠端輔助支承臂位移(h2)∶主支承臂位移(h)∶近端輔助支承臂位移(h1)=1.77∶1∶0.52。過程中,所有隨動支承臂位移與基準支承臂位移差不超過±0.5 mm,受力接近極限值時進行載荷調整,載荷調整好后繼續運行。要求全過程4個主支承臂位移差小于±0.5 mm,否則報警,程序停止。
外圍8個輔助支承臂隨動控制要求:Ⅰ象限4個支承臂以各自初始設定的速度進行同降,Ⅲ象限4個支承臂以各自初始設定的速度進行同升。其位移與基準支承臂位移(按比例折算值)差不超過±0.5 mm。升降過程中保證支承臂受力在要求范圍內。受力接近極限值時進行載荷調整。
在滿足以上控制要求的同時,以水平儀綜合水平度顯示作為評價標準。可以看出,調平過程狀態多樣,情況復雜,需要考慮協調多種影響因素,并反饋到控制策略中,實時檢測調整控制結果。
2 模型分析
可將圖1的12點支撐簡化為如圖3所示模型。1、2、3、4四點確定的平面中心點為O,實際中的芯級水平儀位置。在調平過程中,如若1、2、3、4四點確定的平面為水平面時,Ⅰ、Ⅱ、Ⅲ、Ⅳ象限的三點平面也為水平面,則12點共處于同一水平面中。

圖3 12點支撐簡化模型Fig.3 The Simplified Model Diagram of 12 Points Support
這樣模型可以拆分為2種簡單共面模型:四點支撐調平和三點支撐調平。
a)四點支撐調平。
將由4個獨立象限中1、2、3、4四點,也就是各象限主支承臂所在點位確定的平面記為芯級平面,如圖4所示。

圖4 芯級平面模型Fig.4 Core Level Plane Model Diagram
水平傳感器沿X、Y方向布置,X、Y兩個方向的水平傾角為α和β,兩傳感器間的夾角為γ,則平臺的傾斜角度θ可由α和β合成為[1]

在實際動作中,γ為90°,則公式可簡化為
b)三點支撐調平。
將各獨立象限中三點確定的平面記為跟隨平面,如圖5所示。

圖5 跟隨平面模型Fig.5 The Follow Plane Model Diagram
O點為象限的主支承臂,默認其為基準已根據式(1)模型調整水平,所以在三點支撐模型中無動作。水平面為過O點的調平平面。A、B兩點為象限內輔助支承臂,A′、B′為A、B兩點在水平面的映射。γ、θ為水平儀所測OAB平面與水平面兩垂直方向上的夾角。α、β為∠AOA'、 ∠BOB'。只需得到AA'和BB'的距離,便可得到各支臂的調整位移[2]。
設OA=OB=a,AC=BC=b,如圖5所示,則存在如下關系式:

可得:

3 方案分析
對理想的調平過程與要求進行分析可知,在實際的調平過程中,高度值需要實時監測并將情況進行反饋,才能進行下一步動作,力和水平儀作為檢測和判別的標準,其規律是需要通過反復試驗進行摸索的,將得到的規律加入到控制中有助于進一步的優化,所以提出的方案是以高度作為主要的調平控制對象。
在高度的控制過程中,主要通過對流量的調控,實現對支承臂升降的控制,從而達到對高度的實時監控。在這過程中,主要依據比例積分微分控制(Proportional Integral Derivative,PID)調節原理。
連續時間PID控制系統如圖6所示。圖中,D(s)為控制器。在PID控制系統中,D(s)完成PID控制規律,稱為PID控制器。PID控制器是一種線性控制器,用輸出量y(t)和給定量r(t)之間的誤差的時間函數。e(t)=r(t)-y(t)的比例,積分,微分的線性組合,構成控制量u(t),稱為PID[3]。

圖6 連續時間PID控制系統Fig.6 Continuous time PID Control System
PID整定的理論方法:通過調整PID的3個參數KP、TI、TD,將系統的閉環特征根分布在s域的左半平面的某一特定域內,以保證系統具有足夠的穩定裕度并滿足給定的性能指標[4]。KP增大,系統響應加快,靜差減小,但系統振蕩增強,穩定性下降;TI增大,系統超調減小,振蕩減弱,但系統靜差的消除也隨之減慢;TD增大,調節時間減小,快速性增強,系統振蕩減弱,穩定性增強,但系統對擾動的抑制能力減弱。常見被控量的PID參數經驗選擇范圍如表1所示。

表1 常見被控制量PID參數經驗選擇范圍Tab.1 Empirical Selection Rang Table for PID Parameters of Common Controlled Quantities
本方案主要對液壓的輸出流量進行控制。采用試湊法確定PID調節參數:根據經驗范圍,設定基本的初值,通過模擬或閉環運行觀察系統的響應曲線,然后根據各環節參數對系統響應的大致影響,反復湊試參數,以達到滿意的響應,從而確定PID參數。反饋誤差參量為位移。建立公式模型如下:

標準腿作為基準,將其動作曲線認為是理想曲線;隨動腿作為跟隨,按照理想曲線調整。計算隨動腿和標準腿的變換高度誤差,將誤差δΔ反饋到隨動腿的流量控制中,反復調整得到最佳的輸出曲線。
4 試驗數據分析
根據第3節的方案分析,結合多點調平樣機試驗臺架進行了模擬試驗,試驗臺架實物分布如圖7所示。通過試驗來驗證方案的正確性,摸索多點調平的綜合控制策略,因此,下面對主要的3個影響因素(高度、載荷和水平度)。分別進行分析,綜合各個因素的影響程度,得到最終的綜合控制原則。

圖7 多點調平樣機臺架試驗實物Fig.7 Physical Drawing of Multi-point Leveling Prototype Bench Test
4.1 控制精度
試驗中,分別對4點同升同降、4點對角升降、12點同升同降、12點對角升降4種工作狀態進行模擬試驗。考慮到控制的輸出量,將KP初步設定為2,TI結合試驗中其對控制效果影響較小的實際情況,將其取為0。KP根據各隨動腿的距離比例分別進行設定。依照閥件特性,以輸出電流12 mA為中心零位,即液壓系統為0 L/min,動作死區范圍為[11mA,13mA],默認無動作。電流值大于13 mA時支臂升;電流值小于11 mA時支臂降。
下面以加載10 t時12支臂對角2降4升試驗數據為例,進行分析討論。在該種工況下,載荷的均勻分布情況為主支承臂1176 N,輔助支承臂735 N。載荷超差范圍控制在各支承臂均勻承載情況下的50%。
a)方案初期,根據經驗值范圍選定系數KP為2,高度偏差、輸出流量變化曲線如圖8、圖9所示。

圖8 高度偏差Fig.8 Height Deviation Chart

圖9 輸出流量Fig.9 Output Flow Curve
b)當內圈四主支承臂KP為1,外圈的四輔助支承臂KP為2時,根據前期的試驗數據結果,調整參數KP的大小。高度偏差、輸出流量變化如圖10、11所示。
對比圖8、圖9與圖10、圖11兩組數據曲線可以看出,試驗前期將所有支臂的KP系數均設定為2時,PID的調節幅度較大,調節頻率較頻繁,并伴有某些支臂出現了反向穿越的情況;根據前期的數據結果,將在不同工況下的相對內側4個主支承臂的系數KP減小時,PID的調節幅度減小,頻度適中,消除了大部分的反向穿越現象,使得PID的調整效果更佳。
4.2 載荷規律
對單個支臂進行升降動作,以觀察分析單支臂動作對其他支臂的載荷產生的影響規律。
a)主支臂動作時(主支臂動作先后順序:3、4、2、1),載荷變化如圖12、圖13所示。

圖12 各主支臂載荷變化Fig.12 Load Variation Curve of Each Arm

圖13 各隨動支臂載荷變化Fig.13 Load Variation Curve of Each Arm
b)隨動支臂動作時(動作支臂與先后動作順序:5、7、9、11),載荷變化如圖14所示。

圖14 各支臂載荷變化Fig.14 Load Variation Curve of Each Arm
通過數據曲線圖,不難發現,單個支臂動作調整載荷時,有以下規律:
a)當動作支臂為主支承臂時,主要影響的首先是本象限內的2個輔助支承臂,其次是兩側象限的輔助支承臂,然后是對角象限的主支承臂,且這些受到影響的支臂載荷變化是與動作支臂呈現相反的趨勢。
b)當動作支臂為輔助支承臂時,其主要影響的是本象限內的主支承臂,且這些受到影響的支臂載荷變化是與動作支臂呈現相反的趨勢。
4.3 水平度
試驗過程中,當將平臺依據水平儀顯示調平后,再對單支臂做微小的載荷調整時,對綜合水平度的影響較小,在5″范圍之內。
4.4 控制策略總結
綜合上述分析,可以得到多點支撐下,垂直度調整的控制策略如下:
考慮到水平度在調平后,單支臂微小動作對其影響較小,在控制中以高度誤差值作為基本的控制反饋參數,兼顧載荷情況。在調平動作過程中,檢測載荷情況,設置報警程序,當載荷出現超差時,發出報警信號并暫停動作進行載荷調整;在調平過程中若載荷未出現超差報警,則直到動作結束后,再進行單支臂的載荷調整。但根據試驗顯示,在動作過程中,載荷基本在控制范圍內變化,滿足控制要求。
5 結束語
本文依據需求以高度作為調整控制對象,提出調平控制算法,試驗證明該算法能實時的調整控制支承臂動作速度,將誤差控制在要求范圍之內。方案能滿足設計要求,實現高精度閉環調平控制功能。本文基于設計方案的試驗結果,對多點調平下的多影響因素間相互協調,做了初步探討,總結了多影響因素下的控制策略及優先程度。本試驗是基于模擬臺架進行的,較于實際工程應用鋼性較強,在實際產品應用中效果會較試驗有所提高,試驗結果具有較強的工程應用性。
猜你喜歡
作文周刊·小學一年級版(2022年16期)2022-05-07 11:28:30
作文周刊·小學一年級版(2021年8期)2021-07-07 11:00:47
動漫界·幼教365(大班)(2021年4期)2021-05-23 21:33:16
小學生作文(低年級適用)(2018年3期)2018-04-17 00:58:35
少年博覽·小學低年級(2017年4期)2017-06-09 16:22:28
作文周刊·小學一年級版(2016年28期)2017-06-03 00:28:49
作文評點報·低幼版(2017年7期)2017-03-11 20:49:41
少兒科學周刊·少年版(2015年4期)2015-07-07 20:56:37
電影故事(2015年30期)2015-02-27 09:03:12
七彩語文·低年級(2014年10期)2015-01-14 14:46:27
