一種基于stm32的感應(yīng)互聯(lián)智能運(yùn)輸裝置
2021-02-28 07:27:44哈爾濱工程大學(xué)智能科學(xué)與工程學(xué)院黃新源宋子涵
電子世界 2021年23期
關(guān)鍵詞:單片機(jī)
哈爾濱工程大學(xué)智能科學(xué)與工程學(xué)院 黃新源 宋子涵
如今,人工智能正朝著低成本,多功能,高精度等方面發(fā)展,物聯(lián)網(wǎng)技術(shù)以及自動(dòng)駕駛是國內(nèi)外研究的熱點(diǎn)話題,目前正處在飛速發(fā)展的關(guān)鍵階段,且在信息技術(shù)飛速發(fā)展,多設(shè)備協(xié)同服務(wù)下具有廣闊的應(yīng)用前景。而智能小車作為一種自動(dòng)化技術(shù)的載體,在當(dāng)今世界的應(yīng)用也十分廣泛。例如在新冠疫情期間,為防止疫情大范圍傳播,可以使用一種感應(yīng)互聯(lián)的運(yùn)輸裝置,將各種物件自動(dòng)送給所需要的顧客,減少人員接觸,這會(huì)對疫情防控帶來很大的幫助。
本文將介紹一種基于stm32單片機(jī)且具備多種傳感器感應(yīng)、物聯(lián)網(wǎng)互聯(lián)等特點(diǎn)的智能運(yùn)輸裝置。本裝置將搭載stm32f103rct6處理器和OpenMV攝像頭、ESP8266、DHT11溫濕度傳感器、超聲波等模塊,并且基于TCP協(xié)議進(jìn)行手機(jī)終端-整車硬件的聯(lián)網(wǎng)消息交互,實(shí)現(xiàn)貨物的智能運(yùn)輸。
1 總體設(shè)計(jì)
此運(yùn)輸裝置總體設(shè)計(jì)分為三大部分,分別為機(jī)械結(jié)構(gòu)設(shè)計(jì)、硬件設(shè)計(jì)以及軟件設(shè)計(jì)。機(jī)械結(jié)構(gòu)采用可擺式的懸掛底盤并配備麥克納姆輪;主要的硬件結(jié)構(gòu)為stm32f103rct6單片機(jī)、OpenMV攝像頭模塊,超聲波測距模塊,ESP8266WiFi模塊,LM2596直流穩(wěn)壓模塊、雙通道直流有刷電機(jī)驅(qū)動(dòng)器和MD36N行星減速編碼器電機(jī);軟件設(shè)計(jì)主要為電機(jī)PID控制的程序設(shè)計(jì)、超聲波避障的程序設(shè)計(jì)和物聯(lián)網(wǎng)系統(tǒng)的軟件開發(fā)。總體設(shè)計(jì)框圖如圖1所示。

圖1 總體設(shè)計(jì)框圖
此裝置的工作流程大致為:我們將需要運(yùn)輸?shù)奈锲贩胖迷诖搜b置的載物區(qū),然后給系統(tǒng)上電。系統(tǒng)上電后通過WiFi模塊向遠(yuǎn)程終端請求連接。操作者通過手機(jī)或電腦設(shè)備登錄終端,并且WiFi模塊進(jìn)行配對。配對成功后操作者通過終端向系統(tǒng)發(fā)送工作指令,此裝置開始在相應(yīng)工作指令下運(yùn)輸物品。同時(shí)OpenMV進(jìn)入圖像識(shí)別狀態(tài),此裝置的運(yùn)動(dòng)狀態(tài)會(huì)隨著OpenMV識(shí)別到的物體的不同而發(fā)生改變。在運(yùn)輸?shù)倪^程中,此裝置會(huì)將各傳感器采集的數(shù)值通過WiFi模塊上傳至手機(jī)或電腦終端。如果在運(yùn)輸?shù)倪^程中遇到障礙物,此裝置會(huì)優(yōu)先執(zhí)行避障功能。當(dāng)OpenMV識(shí)別到相應(yīng)的結(jié)束運(yùn)輸標(biāo)志或者終端向此裝置發(fā)出結(jié)束指令時(shí),此裝置停止運(yùn)動(dòng),結(jié)束運(yùn)輸。
2 結(jié)構(gòu)設(shè)計(jì)
2.1 麥克納姆輪
該輪主要由輪轂和圍繞輪轂的輥?zhàn)咏M成,輪轂軸與輥?zhàn)愚D(zhuǎn)軸呈45°角。其中輥?zhàn)邮且环N沒有動(dòng)力的小滾子,各個(gè)小滾子的包絡(luò)線為圓柱面,所以該輪能夠連續(xù)地向前和左右滾動(dòng)。此種運(yùn)動(dòng)方式能適應(yīng)復(fù)雜的工作環(huán)境,克服了傳統(tǒng)輪胎轉(zhuǎn)彎需要較大空間的局限性。麥克納姆輪實(shí)物圖如圖2所示。

圖2 麥克納姆輪實(shí)物圖
2.2 擺式懸掛底盤
由于在平面幾何中,三點(diǎn)確定一平面,所以一般的四輪小車只能在三個(gè)輪胎底部確定的平面內(nèi)運(yùn)動(dòng)。如果地面不是絕對水平,這種結(jié)構(gòu)會(huì)導(dǎo)致總有一只輪胎懸空,造成小車的運(yùn)動(dòng)受到干擾。擺式懸掛結(jié)構(gòu)的底盤可以有效地解決這一問題。此擺式懸掛結(jié)構(gòu)的底盤由兩塊鋁板和一個(gè)改裝后的聯(lián)軸器構(gòu)成,每塊鋁板的兩側(cè)配有兩個(gè)麥克納姆輪。由于兩塊鋁板之間可以繞聯(lián)軸裝置轉(zhuǎn)動(dòng),當(dāng)有一個(gè)輪胎懸空時(shí),通過受力轉(zhuǎn)動(dòng)此輪會(huì)馬上著地,故不會(huì)出現(xiàn)輪胎懸空的情況。這種擺式懸掛結(jié)構(gòu)對室外一些環(huán)境復(fù)雜的地形會(huì)有較強(qiáng)的適應(yīng)性。
3 硬件設(shè)計(jì)
3.1 超聲波測距模塊
HC-SR04超聲波測距模塊可提供2cm-400cm的非接觸式距離感測功能,測距精度可達(dá)3mm,包括發(fā)射器、接收器與控制電路。通常來說,HC-SR04有四個(gè)引腳,分別是VCC、GND、trig和echo。在進(jìn)行硬件連接時(shí),VCC與電源穩(wěn)壓模塊的5v相連,GND與電源穩(wěn)壓模塊的負(fù)極相連,trig角與單片機(jī)上的一個(gè)gpio輸入口相連,echo角與單片機(jī)上的一個(gè)gpio輸出口相連。
此模塊的使用原理十分簡單。給此模塊上電后,通過單片機(jī)的gpio口給echo角一個(gè)20us的高電平信號(hào),觸發(fā)此模塊發(fā)出超聲波,并且使此模塊的trig口開始輸出高電平。當(dāng)此模塊接收到返回的超聲波后,trig口停止輸出高電平,開始輸出低電平。單片機(jī)可以通過定時(shí)器來測量接收到高電平的時(shí)間從而推算出被測量的物體與此模塊之間的距離。
被測量距離(d)=接收到高電平時(shí)間(t)*聲速(v)/2。超聲波模塊工作原理圖如圖3所示。
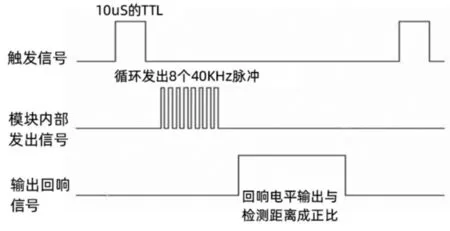
圖3 超聲波模塊工作原理圖
3.2 OpenMV
OpenMV是一個(gè)開源,成本低,卻功能十分強(qiáng)大的攝像頭模塊。OpenMV以STM32為主控電路板,集成了OV7725攝像頭芯片,內(nèi)部已經(jīng)裝載了大量機(jī)器視覺算法。使用者用簡單的micopython語法編程就能使用OpenMV的機(jī)器視覺功能,包括顏色與形狀辨別、人臉識(shí)別、邊緣檢測、目標(biāo)跟蹤等。只需要幾行簡單的python代碼,使用者就可以將這些視覺功能移植到其他控制系統(tǒng)中所需要的位置。其移植過程具有開發(fā)周期小,成本低,操作簡單且效率較高的特點(diǎn)。
例如,此裝置就需要使用OpenMV進(jìn)行目標(biāo)識(shí)別。在運(yùn)輸?shù)倪^程中,我們會(huì)在中途各個(gè)關(guān)鍵點(diǎn)設(shè)置一系列圖標(biāo),不同的圖標(biāo)對應(yīng)這不同的運(yùn)動(dòng)狀態(tài)。例如,如果黃色圓形對應(yīng)左轉(zhuǎn),當(dāng)OpenMV識(shí)別到黃色圓形時(shí),就會(huì)向此裝置發(fā)出左轉(zhuǎn)的指令。OpenMV與32單片機(jī)之間使用串口通訊。
3.3 雙通道直流有刷電機(jī)驅(qū)動(dòng)器
雙通道直流有刷電機(jī)驅(qū)動(dòng)器每通道具有持續(xù)輸出7A大電流能力,可驅(qū)動(dòng)最高135W的直流電機(jī)。此驅(qū)動(dòng)器有兩個(gè)電機(jī)接口分別連在兩個(gè)直流電機(jī)的正負(fù)極上。此外,此驅(qū)動(dòng)器還有十個(gè)控制端口,分別控制兩個(gè)電機(jī)的制動(dòng)與旋轉(zhuǎn)方向。電機(jī)接口的強(qiáng)電與控制端口的弱電采用光耦隔離,故在使用時(shí)不得將電機(jī)端與控制端共地。為了更好的觀察與檢測電機(jī)的運(yùn)動(dòng)狀態(tài),此驅(qū)動(dòng)器還配備了兩個(gè)雙色的指示燈。此驅(qū)動(dòng)器的使用原理框圖如圖4所示。
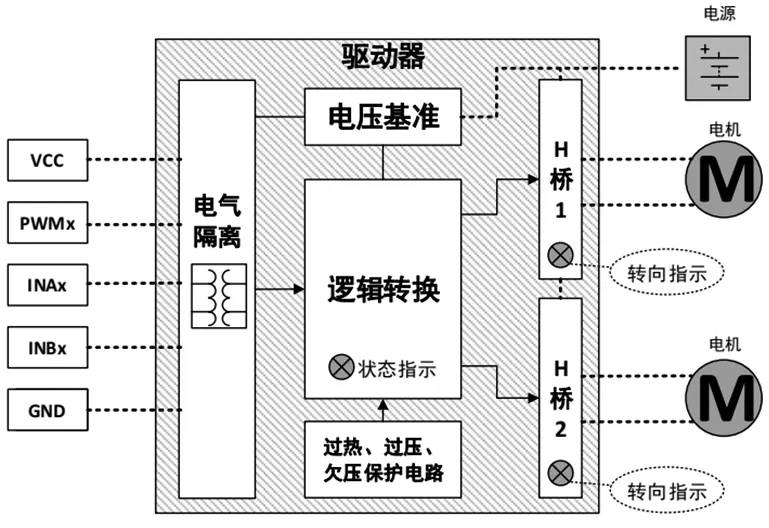
圖4 雙通道直流有刷電機(jī)驅(qū)動(dòng)原理框圖
4 軟件設(shè)計(jì)
軟件設(shè)計(jì)主要由超聲波避障程序、PID算法控制算法程序和物聯(lián)網(wǎng)系統(tǒng)開發(fā)幾個(gè)部分構(gòu)成,總體軟件運(yùn)行流程圖如圖5所示。
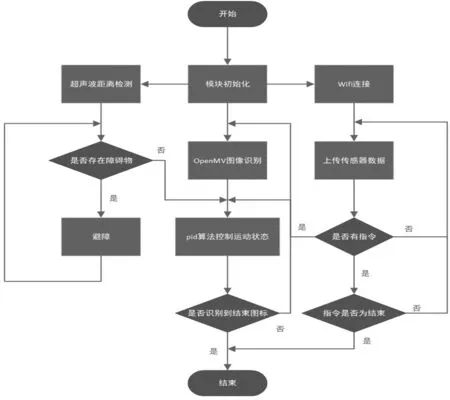
圖5 軟件總體運(yùn)行流程圖
4.1 電機(jī)PID控制程序
PID控制算法是控制系統(tǒng)中最為經(jīng)典的控制算法,也是智能小車電機(jī)控制的設(shè)計(jì)核心,此運(yùn)輸裝置采用的是速度控制中比較常用的PI控制。P是比例部分,可以成比例地反映系統(tǒng)的偏差信號(hào);I為積分部分,主要用于消除靜差提高系統(tǒng)的無差度,且積分效果與積分時(shí)間呈負(fù)相關(guān)。此裝置的PI控制是一種閉環(huán)的線性控制,我們需要通過個(gè)編碼器測量出每個(gè)電機(jī)和車輪的轉(zhuǎn)速。將測量出的轉(zhuǎn)速與給定的轉(zhuǎn)速做對比并使用pi控制公式算出pwm波的占空比,通過單片機(jī)將pwm波輸出給驅(qū)動(dòng)器。
4.2 超聲波避障程序
超聲波測距模塊能對距離超聲波400cm范圍內(nèi)的物體進(jìn)行距離檢測。當(dāng)檢測距離小于20cm時(shí),我們認(rèn)為此超聲波模塊前方存在障礙物。此裝置前部配備有三個(gè)并排放置的超聲波模塊,用于無縫檢測障礙物與裝置間的距離。超聲波1號(hào)放置在最左部,超聲波二號(hào)放置在中間,超聲波三號(hào)放置在最右部。我們可以根據(jù)三個(gè)超聲波模塊檢測到的情況來判斷前方障礙物相對于此運(yùn)輸裝置的方位,然后自主規(guī)劃路徑進(jìn)行避障。當(dāng)障礙物位于此裝置的正前方或者右側(cè)時(shí),此裝置選擇向左移動(dòng)繞過此障礙物。當(dāng)障礙物位于此裝置的右側(cè)時(shí),此裝置選擇向右移動(dòng)繞過此障礙物。只有當(dāng)三個(gè)超聲波模塊的檢測距離都大于等于20cm時(shí),我們認(rèn)為一次避障完成。一次避障完成后,此裝置進(jìn)入正常運(yùn)輸工作模式,并開始下一次距離檢測。具體避障運(yùn)動(dòng)狀態(tài)邏輯表和避障子程序框圖如圖6和圖7所示。
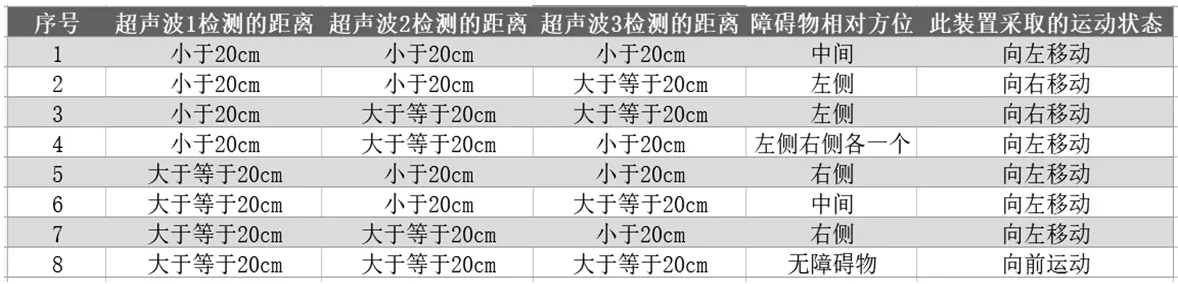
圖6 避障運(yùn)動(dòng)狀態(tài)邏輯表
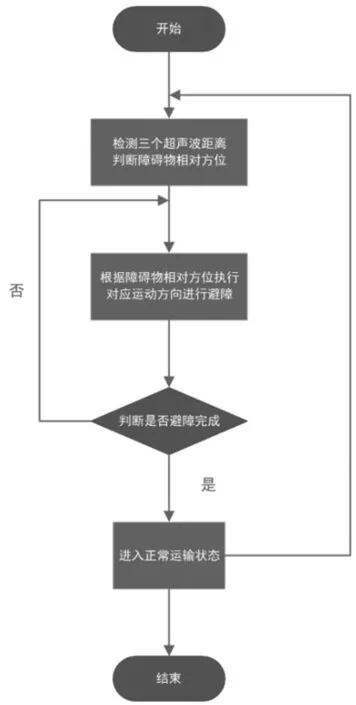
圖7 超聲波避障子程序框圖
4.3 ESP8266WiFi模塊的物聯(lián)網(wǎng)系統(tǒng)開發(fā)
ESP826是一款高性能低功耗的串口轉(zhuǎn)WiFi透傳模塊,通過簡單的AT指令編程能使此模塊連接到互聯(lián)網(wǎng)進(jìn)行通訊。此裝置實(shí)現(xiàn)物聯(lián)網(wǎng)的方式是將ESP-8266WiFi模塊作為客戶端連接到已經(jīng)開發(fā)好的云服務(wù)器平臺(tái)上。這樣操作者就可以通過云平臺(tái)與此裝置進(jìn)行通訊,從而實(shí)現(xiàn)了此運(yùn)輸裝置的物聯(lián)網(wǎng)。云服務(wù)器平臺(tái)的用戶界面以及云服務(wù)器平臺(tái)與WiFi模塊的通訊內(nèi)容需要用戶自行設(shè)定。現(xiàn)在常用的云平臺(tái)有TLink、機(jī)智云、阿里云、深智云等等......此裝置使用的云平臺(tái)是TLink。
本文從機(jī)械結(jié)構(gòu),硬件,軟件等三個(gè)方面介紹了一種感應(yīng)互聯(lián)的智能運(yùn)輸裝置。此裝置以麥克納姆輪、擺式懸掛底盤結(jié)構(gòu)為機(jī)械支撐,搭載stm32單片機(jī)以及OpenMV、溫濕度傳感器和超聲波等傳感模塊實(shí)現(xiàn)對環(huán)境的感知,通過ESP8266模塊和TLink云服務(wù)器平臺(tái)進(jìn)行物聯(lián)網(wǎng)系統(tǒng)開發(fā),最終能在特定的環(huán)境下實(shí)現(xiàn)對物品的智能運(yùn)輸,具有一定的實(shí)際應(yīng)用能力。
猜你喜歡
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年11期)2019-07-04 00:34:48
電子制作(2019年9期)2019-05-30 09:42:02
電子制作(2018年12期)2018-08-01 00:48:04
電子制作(2017年9期)2017-04-17 03:00:53
電子制作(2017年19期)2017-02-02 07:08:27
電子制作(2016年21期)2016-05-17 03:52:51
電子設(shè)計(jì)工程(2015年15期)2015-02-27 12:07:30
電子設(shè)計(jì)工程(2015年8期)2015-02-27 12:05:36