WKNN在UWB定位中的應(yīng)用研究
2021-02-27 08:53:16宋雨昊劉林王平
現(xiàn)代計(jì)算機(jī) 2021年35期
宋雨昊 ,劉林,2,王平,2
(1.西南交通大學(xué)信息科學(xué)與技術(shù)學(xué)院,成都 611756;2.軌道交通工程信息化國(guó)家重點(diǎn)實(shí)驗(yàn)室(中鐵一院),西安 710043)
0 引言
隨著時(shí)代的發(fā)展,人們對(duì)基于位置服務(wù)的需求是迫切的,尤其是在隧道、室內(nèi)、地下等特殊場(chǎng)景下。然而全球定位系統(tǒng)在這些特殊場(chǎng)景下并不能使用,因?yàn)樾l(wèi)星無線電信號(hào)無法穿透堅(jiān)固的墻壁和障礙物[1]。現(xiàn)有的室內(nèi)定位技術(shù)有UWB定位技術(shù)、Zigbee定位技術(shù)、藍(lán)牙定位技術(shù)、WIFI定位技術(shù)、可見光定位技術(shù),等。UWB定位技術(shù)因?yàn)榭垢蓴_性強(qiáng)、時(shí)間分辨率高、測(cè)距精度高[2]等特點(diǎn)在主流的室內(nèi)定位技術(shù)中脫穎而出。
在UWB定位技術(shù)中,常見的定位方法可以分為位置指紋定位法和三角測(cè)量定位法兩種[3]。在實(shí)際定位過程中,多徑效應(yīng)與非視距環(huán)境的存在會(huì)對(duì)三角測(cè)量定位法產(chǎn)生很大影響[4]。而位置指紋定位法可以通過建立指紋庫,在復(fù)雜的環(huán)境中依然可以提供準(zhǔn)確的位置估計(jì)[5]。決定位置指紋定位法定位精度的核心是指紋密度與指紋匹配算法[6]。指紋匹配算法常采用WKNN算法,但其定位性能受多種因素影響,如何發(fā)揮其優(yōu)良的定位性能,是許多科研人員的研究熱點(diǎn)。
WKNN算法通常通過計(jì)算在線定位階段接收的指紋信息與離線數(shù)據(jù)庫儲(chǔ)存的指紋信息之間的“距離”來評(píng)估指紋相似性。文獻(xiàn)[7]中WKNN算法采用傳統(tǒng)的歐氏距離作為距離度量方式;文獻(xiàn)[8]中采用曼哈頓距離;文獻(xiàn)[9]中采用卡方距離。不同的距離度量方式的定位效果不同。因此分析常見的距離度量方式,找到適用于基于TOA的UWB位置指紋定位方法的最佳距離度量方式以提高WKNN算法定位性能是很重要的。除了距離度量方式的選擇,K值的選擇對(duì)WKNN的定位性能有重要影響。文獻(xiàn)[10]在K值為2~6上進(jìn)行分析,視距場(chǎng)景下K值選為5,非視距場(chǎng)景下K值選為6;文獻(xiàn)[11]在非視距場(chǎng)景下指定K值為3進(jìn)行實(shí)驗(yàn)分析;文獻(xiàn)[12]在K為1~10上進(jìn)行分析后,選取K值為3。以上文獻(xiàn)表明,不同條件下,K值的選擇各不相同,K值的大小會(huì)影響WKNN算法的性能,因此,有必要研究適合UWB定位系統(tǒng)的K值。此外,根據(jù)文獻(xiàn)[11]可知,指紋網(wǎng)格劃分對(duì)定位精度有著一定的影響。針對(duì)上述問題,本文將綜合考慮距離度量方式、K值的選取、網(wǎng)格大小三項(xiàng)指標(biāo),把UWB測(cè)距值作為指紋信息,在非視距場(chǎng)景下對(duì)基于WKNN的UWB位置指紋定位法進(jìn)行仿真分析。
1 基于TOA的UWB位置指紋定位方法
UWB位置指紋定位法的主要思路是在待定位區(qū)域?qū)崟r(shí)采集指紋信息,通過匹配指紋數(shù)據(jù)庫中預(yù)先采集到的指紋信息來達(dá)到定位的目的。該方法一般分為兩個(gè)階段,第一階段是構(gòu)造指紋數(shù)據(jù)庫的離線采集階段;第二階段是目標(biāo)定位的在線定位階段。UWB位置指紋定位法如圖1所示。
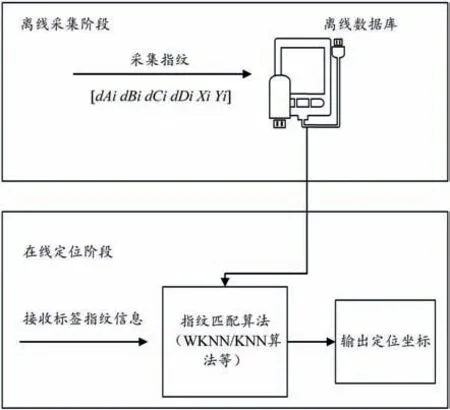
圖1 位置指紋定位法結(jié)構(gòu)
為了減少一定的工作量,離線采集階段一般是將待定位區(qū)域按照網(wǎng)格劃分,把網(wǎng)格的中心或者網(wǎng)格的交界點(diǎn)作為采樣點(diǎn),再進(jìn)行指紋信息的采集工作。在本文的研究中,考慮到基站與標(biāo)簽之間的到達(dá)時(shí)間信息(time of arrival,TOA)數(shù)值過小,因此將基站與標(biāo)簽之間的測(cè)距值作為指紋。離線數(shù)據(jù)庫的存儲(chǔ)結(jié)構(gòu)如表1所示。
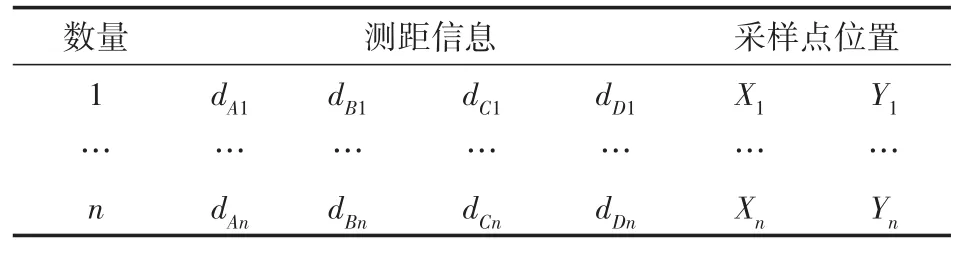
表1 離線數(shù)據(jù)庫
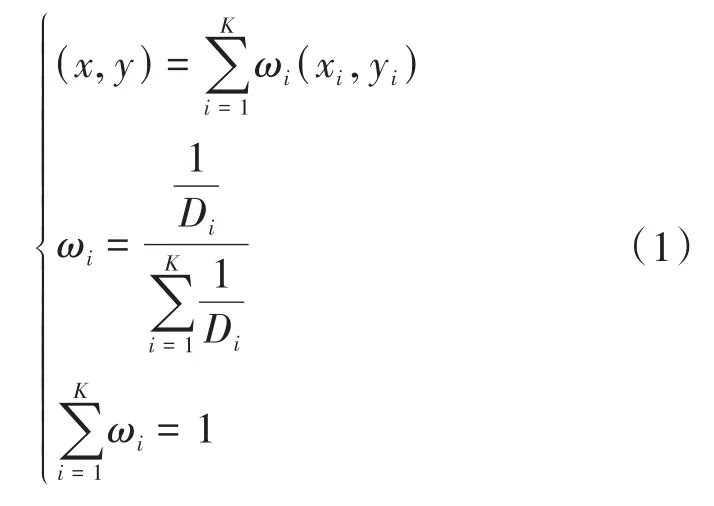
在線定位階段利用指紋匹配算法對(duì)實(shí)時(shí)采集的指紋信息進(jìn)行匹配。本文采用WKNN算法進(jìn)行指紋匹配。WKNN算法是一種判決式方法,在匹配時(shí),通過計(jì)算實(shí)時(shí)采集的指紋信息與離線階段構(gòu)建的指紋數(shù)據(jù)庫中的指紋信息之間的“距離”,找到相似度最高的K個(gè)采樣點(diǎn),然后利用K個(gè)采樣點(diǎn)位置信息進(jìn)行加權(quán)處理,從而得出目標(biāo)位置,加權(quán)方式如式(1)所示。式中,D為指紋“距離”,常采用歐氏距離、曼哈頓距離、切比雪夫距離、卡方距離等距離度量方式。
假定兩個(gè)指紋向量M=(x1,x2,x3,x4),N=(y1,y2,y3,y4)。對(duì)于歐氏距離、曼哈頓距離、切比雪夫距離,D的計(jì)算如式(2)所示。
p=1時(shí)為曼哈頓距離;p=2時(shí)為歐氏距離;p=∞時(shí)為切比雪夫距離。
對(duì)于卡方距離,D的計(jì)算如式(3)所示。
2 定位算法性能分析
在本節(jié)中,將主要對(duì)非視距環(huán)境下的WKNN指紋匹配算法進(jìn)行綜合分析。實(shí)驗(yàn)仿真環(huán)境設(shè)置為2 m×6 m的二維矩形平面,基站選取為4個(gè),標(biāo)簽為1個(gè);基站的位置坐標(biāo)分別為基站A(0 m,0 m),基站B(6 m,0 m),基站C(6 m,2 m),基站D(0 m,2 m)。訓(xùn)練集大小根據(jù)網(wǎng)格大小而定,網(wǎng)格大小分別為0.25 m×0.25 m、0.5 m×0.5 m、0.75 m×0.75 m三種,對(duì)應(yīng)訓(xùn)練集大小分別為221組、61組、25組數(shù)據(jù);測(cè)試集均為1000組數(shù)據(jù)。
非視距環(huán)境下,基站與標(biāo)簽之間的系統(tǒng)測(cè)距誤差符合均值為0,標(biāo)準(zhǔn)差為0.1 m的高斯分布;非視距誤差符合均值不為0的高斯分布或者指數(shù)分布。其中,非視距誤差符合指數(shù)分布時(shí)由公式(4)確定。
其中,trms為均方根時(shí)延拓展,根據(jù)文獻(xiàn)[13]可知,T約為19 ns;di為基站與標(biāo)簽之間的距離;在本文的仿真中,ε取0.5;ξ符合對(duì)數(shù)正態(tài)分布10lg(ξ)~N(0,σ),σ取為4 dB。
2.1 距離度量方式對(duì)定位精度的影響
2.1.1 非視距誤差服從高斯分布時(shí)的影響
圖2是網(wǎng)格邊長(zhǎng)為0.25 m,基站與標(biāo)簽之間的系統(tǒng)測(cè)距誤差符合N(0,0.1 m)的高斯分布,非視距誤差符合N(0.5 m,0.2 m)的高斯分布時(shí),最近鄰居數(shù)K與測(cè)試集均方根誤差(root mean square error,RMSE)的關(guān)系,其中K的范圍在1~20之間。根據(jù)圖2選擇RSME最小時(shí)四種距離度量方式對(duì)應(yīng)K值(K分別取10、10、9、11)進(jìn)行WKNN位置指紋定位性能分析,定位誤差累積分布函數(shù)(cumulative distribution function,CDF)如圖3所示。
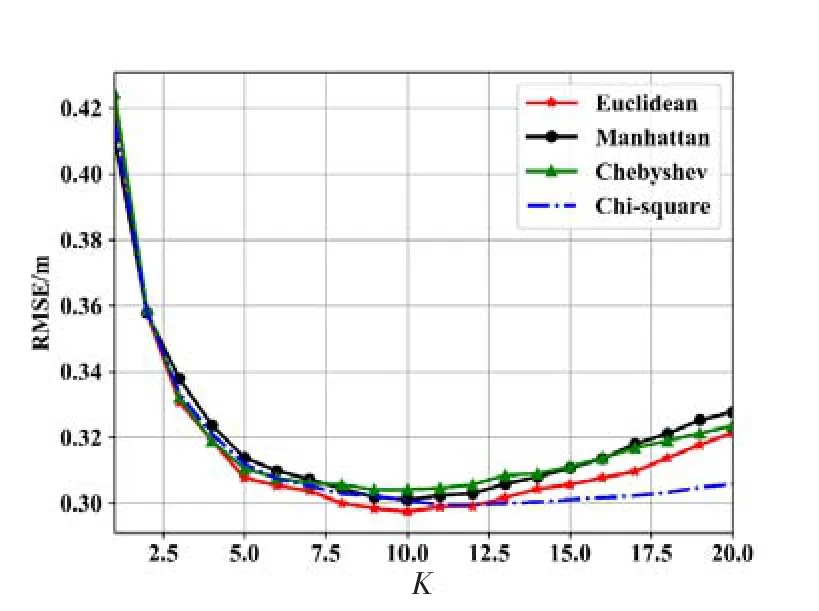
圖2 最近鄰居數(shù)K與均方根誤差的關(guān)系(網(wǎng)格0.25 m)
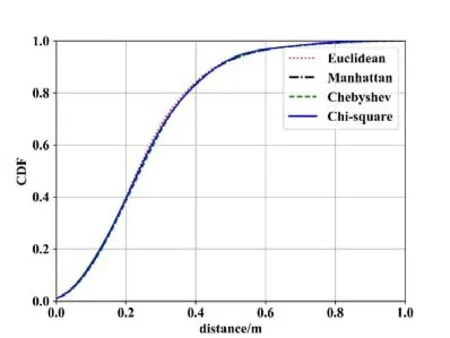
圖3 誤差累積分布函數(shù)圖(網(wǎng)格0.25 m)
當(dāng)網(wǎng)格邊長(zhǎng)為0.25 m,基站與標(biāo)簽之間的系統(tǒng)測(cè)距誤差符合N(0 m,0.1 m)的高斯分布,非視距誤差符合均值分別為0.4 m、0.5 m、0.6 m,標(biāo)準(zhǔn)差分別為0.1 m、0.2 m的高斯分布的各種情況定位結(jié)果如表2所示。
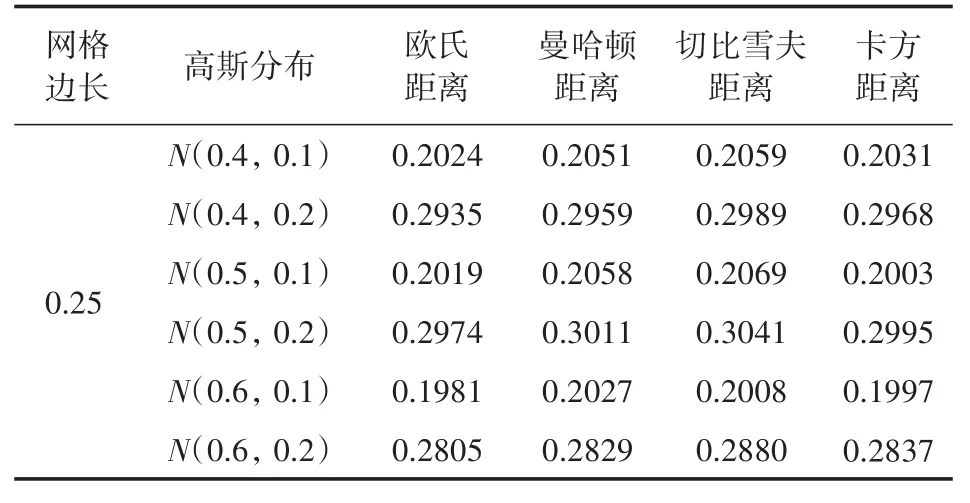
表2 網(wǎng)格邊長(zhǎng)為0.25 m時(shí)均方根誤差分析單位:m
根據(jù)表2、圖2、圖3可以發(fā)現(xiàn),當(dāng)網(wǎng)格大小為0.25 m×0.25 m,非視距誤差符合以上類型的高斯分布時(shí),四種距離度量方式效果接近。
圖4是網(wǎng)格邊長(zhǎng)為0.5 m,其他仿真條件同圖2時(shí)最近鄰居數(shù)K與測(cè)試集均方根誤差的關(guān)系圖。根據(jù)圖4選擇RSME最小時(shí)四種距離度量方式對(duì)應(yīng)K值(K分別取4、5、5、6)進(jìn)行WKNN位置指紋定位性能分析,定位誤差累積分布函數(shù)如圖5所示。表3為網(wǎng)格邊長(zhǎng)是0.5 m,仿真條件同表2時(shí)各種情況下的定位結(jié)果。根據(jù)表3、圖4、圖5可以發(fā)現(xiàn),當(dāng)網(wǎng)格大小為0.5 m×0.5 m,非視距誤差符合以上類型的高斯分布時(shí),切比雪夫距離效果最差;歐氏距離、曼哈頓距離效果較好;卡方距離效果略好于其他三種。
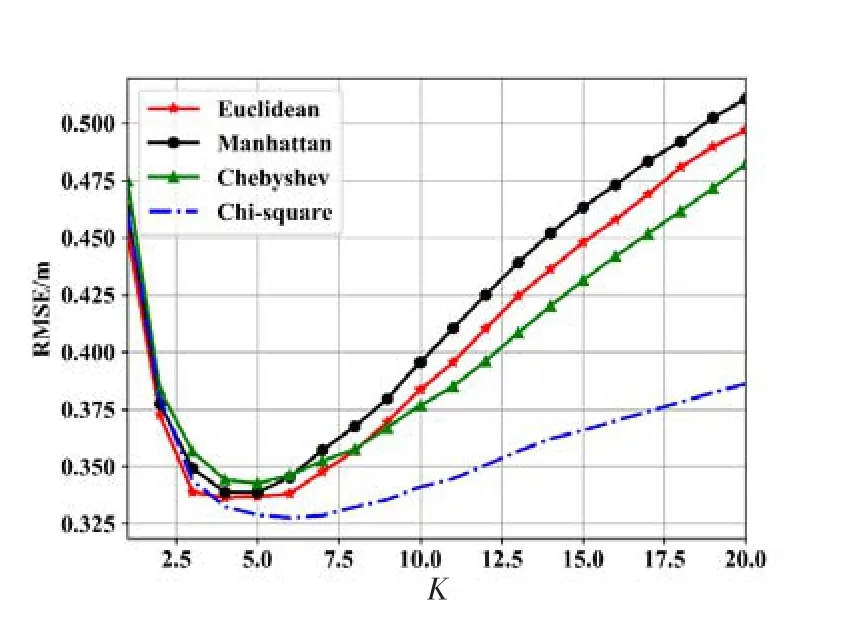
圖4 最近鄰居數(shù)K與均方根誤差的關(guān)系(網(wǎng)格0.5 m)
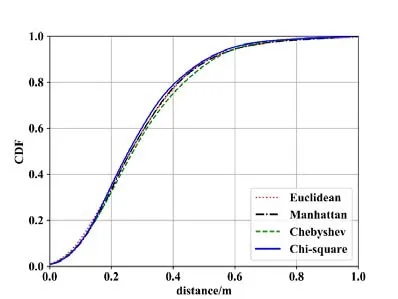
圖5 誤差累積分布函數(shù)圖(網(wǎng)格0.5 m)
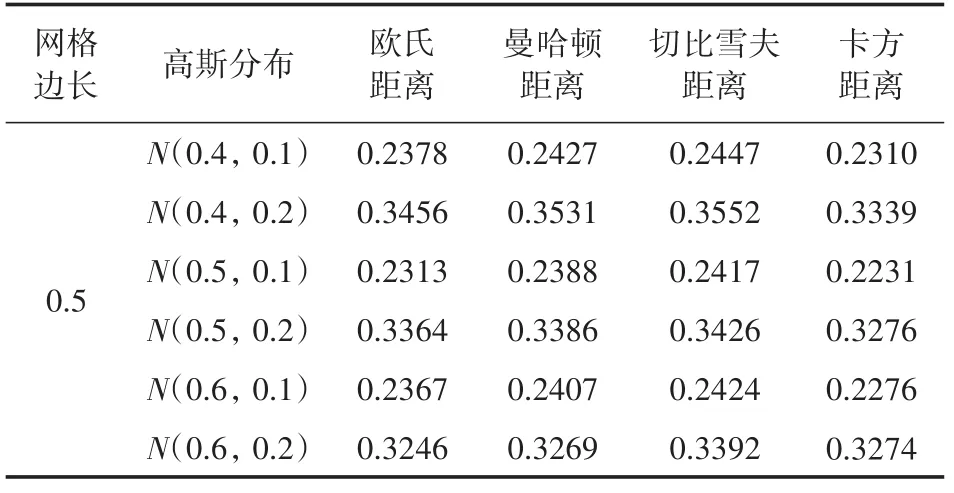
表3 網(wǎng)格邊長(zhǎng)為0.5 m時(shí)均方根誤差分析單位:m
圖6是網(wǎng)格邊長(zhǎng)為0.75 m,其他仿真條件同圖2時(shí)最近鄰居數(shù)K與測(cè)試集均方根誤差的關(guān)系圖。根據(jù)圖6選擇RSME最小時(shí)四種距離度量方式對(duì)應(yīng)K值(K分別取2、2、3、3)進(jìn)行WKNN位置指紋定位性能分析,定位誤差累積分布函數(shù)如圖7所示。表4是網(wǎng)格邊長(zhǎng)為0.75 m,其他仿真條件同表2時(shí)各種情況定位結(jié)果。
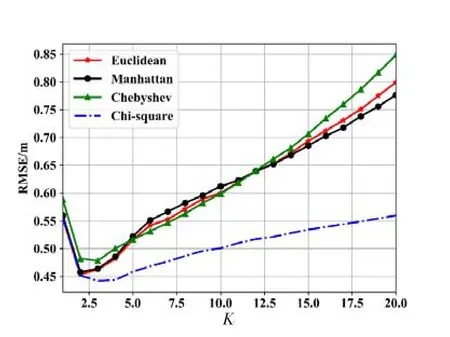
圖6 最近鄰居數(shù)K與均方根誤差的關(guān)系(網(wǎng)格0.75 m)
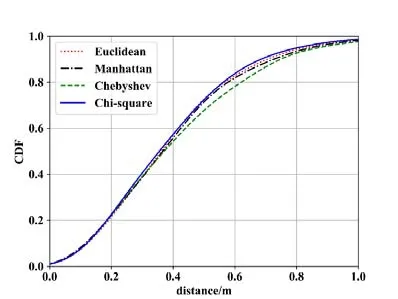
圖7 誤差累積分布函數(shù)圖(網(wǎng)格0.75 m)
根據(jù)表4、圖6、圖7可以發(fā)現(xiàn),當(dāng)網(wǎng)格大小為0.75 m×0.75 m,非視距誤差符合以上類型的高斯分布時(shí),采用卡方距離效果最好。
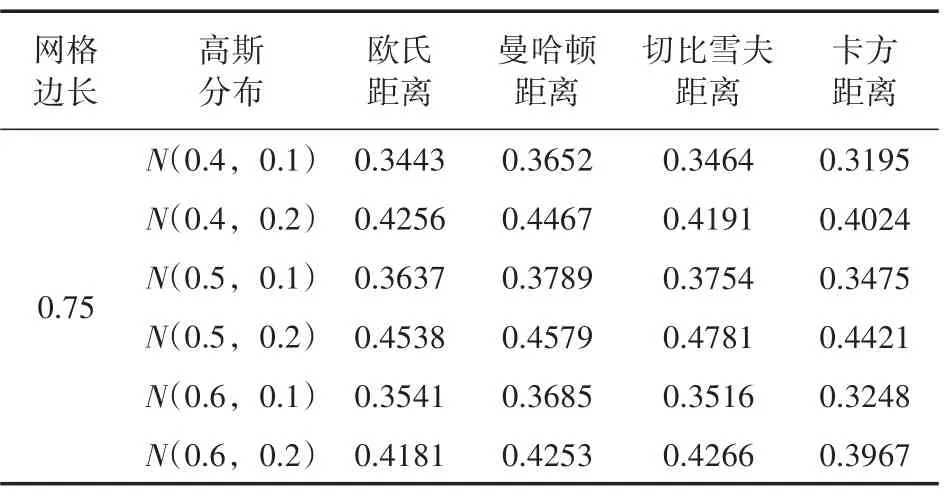
表4 網(wǎng)格邊長(zhǎng)為0.75 m時(shí)均方根誤差分析單位:m
2.1.2 非視距誤差服從指數(shù)分布時(shí)的影響
圖8是網(wǎng)格大小為0.5 m×0.5 m,系統(tǒng)測(cè)距誤差服從N(0 m,0.1 m)的高斯分布,非視距誤差符合指數(shù)分布時(shí),最近鄰居數(shù)K與測(cè)試集均方根誤差的關(guān)系圖。根據(jù)圖8選擇RSME最小時(shí)四種距離度量方式對(duì)應(yīng)K值(K分別取6、6、5、8)進(jìn)行WKNN位置指紋定位性能分析,定位誤差累積分布函數(shù)如圖9所示,曼哈頓距離與卡方距離對(duì)應(yīng)的曲線在上方,說明根據(jù)曼哈頓距離與卡方距離進(jìn)行加權(quán)的效果略優(yōu)。
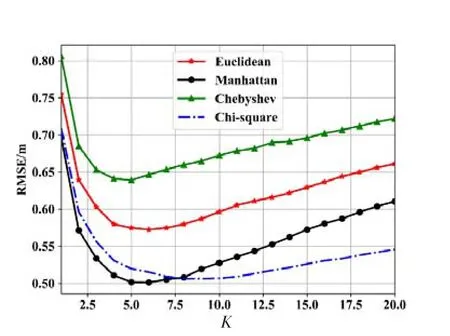
圖8 最近鄰居數(shù)K與均方根誤差的關(guān)系
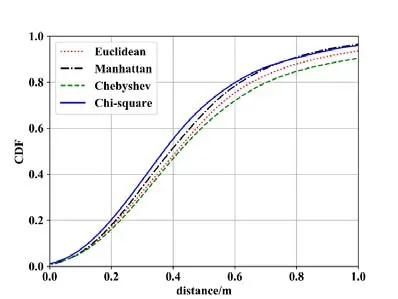
圖9 誤差累積分布函數(shù)
表5是系統(tǒng)測(cè)距誤差符合均值為0,標(biāo)準(zhǔn)差為0.1 m的高斯分布,非視距誤差符合指數(shù)分布,網(wǎng)格邊長(zhǎng)分別為0.25 m、0.5 m、0.75 m時(shí)不同距離度量方式的性能分析。
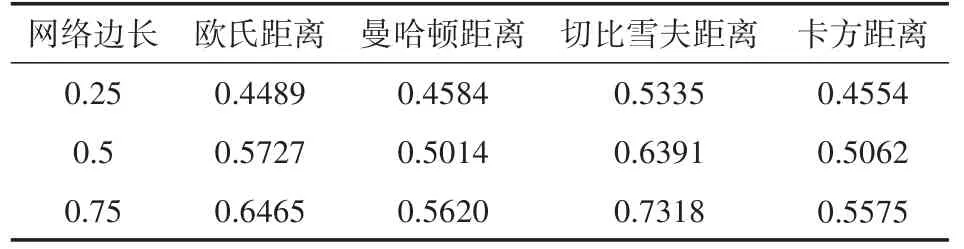
表5 非視距誤差服從指數(shù)分布時(shí)均方根誤差分析單位:m
從以上仿真結(jié)果可以看出,非視距誤差符合以上類型的指數(shù)分布時(shí),切比雪夫距離與歐式距離效果較差,卡方距離與曼哈頓距離效果較好。綜合非視距誤差服從高斯和指數(shù)分布情況的仿真結(jié)果可以得到,卡方距離是最佳的距離度量方式。
2.2 K值對(duì)定位精度的影響
根據(jù)2.1節(jié)的仿真結(jié)果,本節(jié)將分析距離度量方式為卡方距離時(shí)K值對(duì)定位精度的影響。從圖2、圖4、圖6和圖8可以看出,不同情況下均方根誤差最小時(shí)K值的分布如表6所示。可以發(fā)現(xiàn),網(wǎng)格邊長(zhǎng)為0.25 m時(shí),指紋量為221組,指紋密度約為18組/m2,K值的最優(yōu)值在10左右;網(wǎng)格邊長(zhǎng)為0.5 m時(shí),指紋量為61組,指紋密度約為5組/m2,K值的最優(yōu)值在6左右;網(wǎng)格邊長(zhǎng)為0.75 m時(shí),指紋量為25組,指紋密度約為2組/m2,K值的最優(yōu)值在3左右。從以上分析可以看出,網(wǎng)格密度越大,K值的最優(yōu)值越大;網(wǎng)格密度越小,K值的最優(yōu)值越小。因此,實(shí)際運(yùn)用時(shí)可以根據(jù)該規(guī)律進(jìn)行K值的選擇。
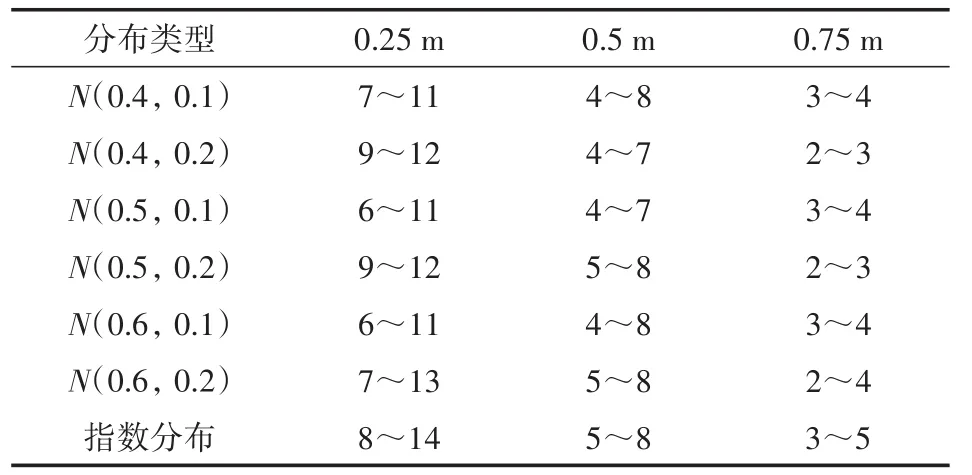
表6 最佳K值單位:m
為了進(jìn)一步驗(yàn)證K值的影響,本文仿真分析了不同K值下的CDF性能。圖10是網(wǎng)格大小為0.5 m×0.5 m,系統(tǒng)測(cè)距誤差符合N(0 m,0.1 m),非視距誤差符合N(0.5 m,0.2 m)時(shí)的定位誤差累積分布函數(shù)。圖11是非視距誤差服從指數(shù)分布,其他條件同圖10時(shí)的定位誤差累積分布函數(shù)。根據(jù)圖10和圖11可以發(fā)現(xiàn),K為5~8時(shí),對(duì)應(yīng)的曲線位于上方,說明K取5~8時(shí)可以使WKNN算法發(fā)揮出較好的定位效果。
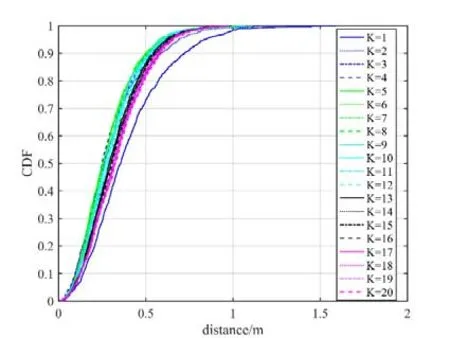
圖10 誤差累積分布函數(shù)
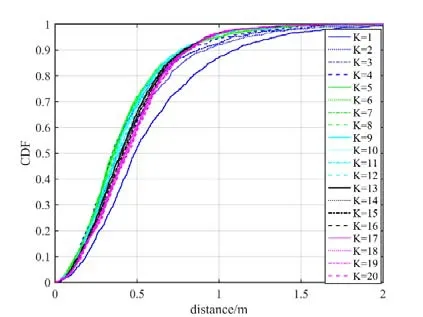
圖11 誤差累積分布函數(shù)
從圖2、圖4、圖6和圖8可以發(fā)現(xiàn),測(cè)試集均方根誤差,隨著最近鄰居數(shù)K的增大,先減小而后增大,說明最近鄰居數(shù)K選擇的過大或過小,均會(huì)影響定位精度。而且,最近鄰居數(shù)K過大也會(huì)增加UWB位置指紋定位法在線定位的時(shí)間。因此,K值的選取可以限制在2~10之間。
2.3 網(wǎng)格大小對(duì)定位精度的影響
非視距誤差符合均值不為0的高斯分布時(shí),通過對(duì)表2、表3、表4的分析可知,當(dāng)系統(tǒng)測(cè)距誤差一定,非視距誤差符合相同分布,網(wǎng)格邊長(zhǎng)為0.25 m時(shí)的定位誤差的均方根誤差小于網(wǎng)格邊長(zhǎng)分別為0.5 m、0.75 m時(shí)的均方根誤差。例如:當(dāng)系統(tǒng)測(cè)距誤差符合N(0 m,0.1 m),非視距誤差符合N(0.4 m,0.1 m)的高斯分布,根據(jù)表2、表3和表4,網(wǎng)格邊長(zhǎng)為0.25 m時(shí),定位誤差的均方根誤差為0.2031 m;網(wǎng)格邊長(zhǎng)為0.5 m時(shí),均方根誤差為0.2310 m;網(wǎng)格邊長(zhǎng)為0.75 m時(shí),均方根誤差為0.3195 m。
此外,由表2、表3、表4可知,當(dāng)網(wǎng)格邊長(zhǎng)一定,非視距誤差符合高斯分布時(shí),均值不同,但標(biāo)準(zhǔn)差相同時(shí),定位誤差均方根誤差均較為接近;且標(biāo)準(zhǔn)差較大時(shí),均方根誤差亦較大。因此,在實(shí)際定位過程中,通過降低測(cè)距值的波動(dòng)范圍,亦可以提高定位精度。
非視距誤差符合指數(shù)分布時(shí),通過對(duì)表5的分析可知,當(dāng)系統(tǒng)測(cè)距誤差一定,非視距誤差符合相同分布,網(wǎng)格邊長(zhǎng)為0.25 m時(shí)的定位誤差均方根誤差均小于網(wǎng)格邊長(zhǎng)分別為0.5 m、0.75 m時(shí)的均方根誤差。當(dāng)網(wǎng)格邊長(zhǎng)為0.25 m時(shí),定位誤差均方根誤差為0.4554 m;網(wǎng)格邊長(zhǎng)為0.5 m時(shí),均方根誤差為0.5062 m;網(wǎng)格邊長(zhǎng)為0.75 m時(shí),均方根誤差為0.5575 m。
為了進(jìn)一步說明網(wǎng)格大小對(duì)定位精度的影響,在系統(tǒng)測(cè)距誤差符合N(0 m,0.1 m)的高斯分布,非視距誤差符合指數(shù)分布與N(0.5,0.2 m)的高斯分布,距離度量方式選定為卡方距離的情況下,增加邊長(zhǎng)分別為0.1 m,0.6 m的網(wǎng)格進(jìn)行對(duì)比分析,結(jié)果如表7所示。
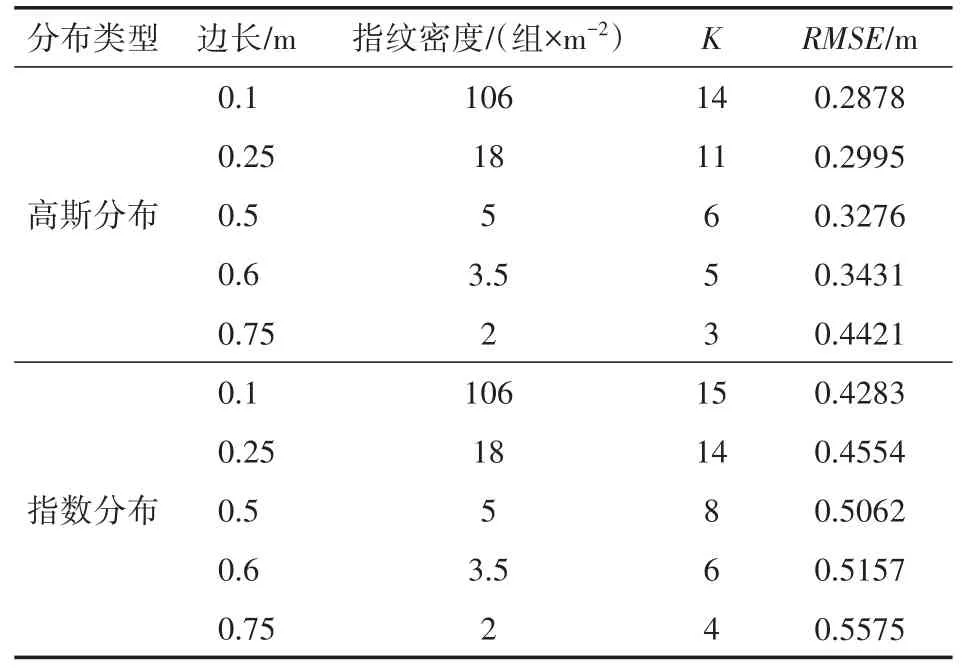
表7 網(wǎng)格大小對(duì)定位精度的影響
對(duì)于固定的定位區(qū)域,從指紋量的角度出發(fā),網(wǎng)格大小決定了指紋密度。網(wǎng)格邊長(zhǎng)小,指紋密度大;網(wǎng)格邊長(zhǎng)大,指紋密度小。根據(jù)上述實(shí)驗(yàn)結(jié)果,說明隨著指紋密度增大,提升定位精度的效果并不是很明顯;但隨著指紋密度變小,定位精度呈現(xiàn)下降的趨勢(shì)。
3 結(jié)語
本文在非視距場(chǎng)景下對(duì)基于WKNN的UWB位置指紋定位法進(jìn)行了仿真分析。仿真表明,WKNN算法采用卡方距離作為距離度量方式優(yōu)于歐氏距離、曼哈頓距離和切比雪夫距離。WKNN算法中最近鄰居數(shù)K的大小對(duì)定位精度有著很大的影響,最近鄰居數(shù)K選擇得過大或過小,均會(huì)影響定位精度。最近鄰居數(shù)K的選擇與指紋密度有關(guān),一般可限制在2~10之間,指紋密度大時(shí),適宜選擇在K=10附近;指紋密度中等時(shí),適宜選擇在K=6附近;指紋密度小時(shí),適宜選擇在K=3附近。