基于限定記憶加權的輔雷達時變系統誤差估計方法?
2021-02-26 12:34:42
艦船電子工程 2021年1期
(海軍航空大學 煙臺 264001)
1 引言
雷達組網利用多部雷達之間的信息互聯、對比判決,有效克服單一雷達信息獲取的局限,實現不同情報的相互共享以及更精確地對目標的參數特征進行估計識別[1]。但組網雷達中系統誤差的存在是制約信息融合效用的重要因素。對此,雷達誤差配準問題得到了廣泛的研究,傳統方法主要可以分為三類:1)離線估計方法,如最小二乘(LS)類[2]、極大似然(EML)類算法;2)實時估計方法[3~4],如卡爾曼濾波類算法;3)聯合估計算法,如擴維類[5~6],雙階算法等[7~8]。以上算法都主要針對固定系統誤差的估計與修正。
在現實環境中,雷達系統誤差往往事先無法得知或不準確,或受海域環境多變以及雷達本身機械損耗影響,系統誤差在海域內的分布情況極易發生變化。而傳統方法在系統誤差未知、時變時難以準確跟蹤目標航跡。對此,文獻[9]提出針對量測誤差變化進行建模的方法進行誤差修正,但誤差變化的多樣性是否能完全利用模型代替仍有待驗證。文獻[10]提出利用mean-shift進行動態誤差估計,但對量測樣本要求較高,工程實現較為困難。文獻[11]提出利用反比例函數進行變誤差估計,但僅對距離誤差進行了估計。且當前組網雷達系統誤差動態估計時,沒有考慮充分利用探測精度高或者已被標校的雷達來實現對組網系統其余雷達的誤差輔助估計。
針對系統誤差時變時,當前方法難以準確跟蹤目標航跡以及發生濾波發散的問題,本文以探測精度高的中心雷達為參照,將限定記憶指數加權方法與次優極大后驗(Maximum A Posterior,MAP)估值器[12]相結合,提出一種基于限定記憶MAP估值器的輔助雷達自適應EKF誤差配準算法。該算法在雷達系統誤差未知、時變情況下,能夠對輔助雷達系統誤差進行有效的實時估計和校準。一方面,該自適應算法相較于現有濾波算法無需提前獲知雷達系統誤差,且遞推校準算法簡單,易于現實應用;另一方面,限定記憶加權因子的引入相較于次優常值MAP估值器以及減消記憶MAP估值器精度得到提高,計算時間大大減少。仿真分析及對比實驗驗證了本文所提算法的有效性和可行性。
2 系統模型與問題描述
設組網雷達由中心雷達與多個輔助雷達組成,其中,中心雷達經過標校設備事先標校,探測精度較高。以此中心雷達為參考,對多輔助雷達的系統誤差進行估計。
對于與中心雷達同時探測到一批目標的各輔助雷達i,其觀測向量定義為Zi(k)=[ri(k)'θi(k)] ,狀態向量為,系統偏差為,則有如下關系式:


其中,L(k)為白色高斯的隨機變量,其方差陣為Q(k),G(k)為過程噪聲分布矩陣。
設輔助雷達i相對于中心雷達存在系統誤差Δi(k),且 Δi(k)隨量測時間的推進發生變化,則輔助雷達i的量測方程為

其中,W(k)為白色高斯的隨機變量,其方差陣為R(k)。利用擴展卡爾曼濾波實現各輔助雷達的目標狀態的估計。

一般來說,對于系統誤差估計與修正問題由以下假設:1)同一雷達在某海域的系統誤差在很長一段時間內可看作是緩變的;2)不同雷達對于同一海域的系統誤差變化情況是不同的。因此,假設中心雷達利用合作目標(GPS、AIS等)實現了精確校準,但多個輔助雷達系統誤差未知且海域系統誤差時變、分布不明。本文即以中心雷達為參考,實時估計各輔助雷達的系統誤差,實現更精準的信息融合。
3 系統誤差估計
3.1 恒定系統誤差下次優MAP估值器

但對于時變系統誤差的估計,距當前時刻較遠的陳舊數據會影響時變系統誤差估計的更新,使估計值不夠準確,進而對后續估計值產生影響,直至產生發散。因此在估計時應著重利用新進數據,逐漸遺忘陳舊數據。對此,可將次優MAP系統誤差估計器進行衰減指數加權以實現數據的權重選取。從系統誤差變化快慢以及計算耗時的角度出發,給出兩種指數加權MAP估計器。
3.2 時變系統誤差下漸消記憶指數加權MAP估值器
當時變系統誤差變化緩慢時,可以將漸消記憶指數加權應用到MAP估值器中,即對各時刻中心、輔助雷達濾波差值賦予不同的權重系數。加權系數{βj}的選取滿足如下公式:

其中,b為遺忘因子,其值視系統誤差時變快慢而選擇不同值。實際應用中,一般取0.95~0.995。對于b的取值與衰減程度的關系,如圖1所示。
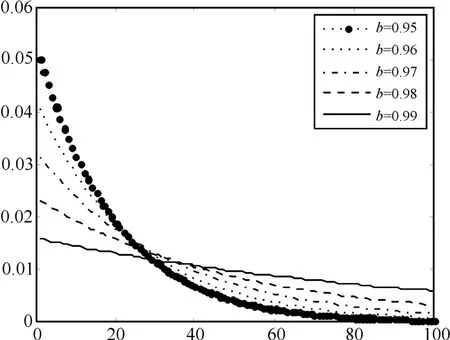
圖1 加權系數與遺忘因子數值關系曲線
式(12)中每項濾波差值利用加權系數βk+1-j替換原有權系數1k,即得到漸消記憶時變系統誤差MAP估計器:

3.3 時變系統誤差下限定記憶指數加權MAP估值器
漸消記憶指數加權MAP估值器在對時變系統誤差進行處理時,利用了當前時刻過去所有的記憶數據,但數據較當前時刻越陳舊,其所被賦予的權重越小,即對當前系統誤差的估計作用越小。當系統誤差變化較快或可能產生突變時,過于陳舊的濾波差值數據對當前時刻系統誤差的估計參與度很小,由于遺忘因子與加權系數的關系,當雷達采樣時間較長時,過于陳舊的濾波差值數據被賦予極小的權重,不僅對當前時刻估計作用不大,且各時刻因頻繁、重復的權重因子分配使計算時長增大。因此,一方面,為提高時變系統誤差估計精度;另一方面,減小計算時長,只利用當前時刻之前一固定時間段內數據進行誤差估計,即將限定指數加權方法應用到MAP估值器中。
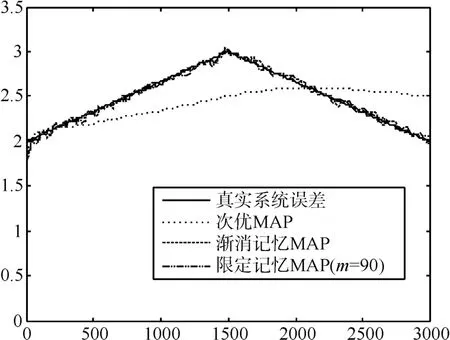
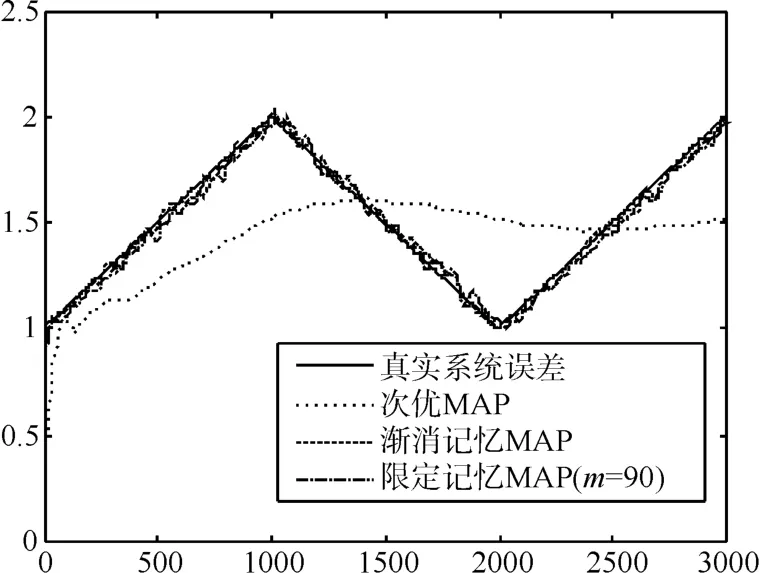
預先設定限定記憶長度為m,且0 其中,b為遺忘因子。將式(12)中k-m時刻之后每項利用加權系數βj+1-m替換原有權系數,即得到限定記憶時變系統誤差MAP估計器: 限定記憶時變系統誤差MAP估值器的起始遞推時刻為k=m+1,因此在計算時需要已知當前時刻之前存儲的歷史數據。即事先確定m時刻之前初 始 值若m時刻之前初始值無法事先確定,則當k 假設在k時刻,各輔助雷達利用EKF得到各自對目標的狀態濾波值,然后利用限定記憶指數加權MAP估值器得到系統誤差估計,之后對k+1時刻輔助雷達i的量測數據Zi(k+1)進行修正,對雷達在探測海域內時變系統誤差進行實時遞推估計和校準。最后,將各雷達修正后航跡上報融合中心,進行數據融合。 圖2 限定記憶MAP誤差配準方法框架 利用仿真實驗進一步說明本文所提誤差配準的精確性。考慮如下仿真環境。 假設存在三部岸基對海雷達,其中一部為中心雷達,位于坐標原點,兩部為輔助雷達,其中輔助雷達1位置坐標為(u1'v),輔助雷達2位置坐標為(u2'v),其中u1=185200m,u2=55260m,v=0。海面存在一船舶待探測目標,遠離海岸方向向東行進,如圖3所示,雷達探測過程中均存在雷達扇面橫掃過程。 圖3 仿真場景示意圖 設三部雷達的量測噪聲誤差均為σr=σr1=σr2=50m ,σθ=σθ1=σθ2=0.2°。 為對變化的系統誤差進行準確的仿真,仿真之前利用測試雷達1、2與AIS標校設備對某海域船舶目標進行量測。利用AIS得到的目標精準位置與雷達量測位置的一次差得到雷達的系統誤差(量測目的是為探究系統誤差大體變化趨勢,所以此時忽略量測誤差影響)。得到系統誤差與其量測向量關系大體如圖4、5所示。分析可以看出,距離、角度系統誤差與其量測向量總體呈線性關系,但角度系統誤差波動性較大。 圖4 測試雷達距離系統誤差與量測關系 圖5 測試雷達角度系統誤差與量測關系 基于此實測驗證,為簡化誤差變化模型,現將系統誤差設定如下:雷達1距離、角度系統誤差,雷達2距離、角度系統誤差分別為 其中,n為迭代步數。目標的真實初始狀態為(6000'50'50000'-10),迭代步數為n=3000。 圖6~9是本文所提限定記憶MAP估值方法(限定長度m=90)與減消記憶MAP估值方法以及次優MAP估值方法進行系統誤差實時配準后的對比結果,可以看出,限定記憶MAP估值方法(限定長度m=90)與減消記憶MAP估值方法都可以對時變系統誤差進行實時跟蹤,但限定記憶方法較減消記憶方法計算時間大大縮減。另外,次優MAP常值系統誤差估值方法無法對時變系統誤差進行實時估計。 圖6 雷達1三種不同方法距離系統誤差估計對比 圖7 雷達1三種不同方法角度系統誤差估計對比 圖8 雷達2三種不同方法距離系統誤差估計對比 圖9 雷達2三種不同方法角度系統誤差估計對比 圖10~13為限定記憶MAP估值方法在限定長度m取不同值時的誤差配準效果,可以看出,當限定長度過小時,一旦系統誤差出現估計發散,后續系統誤差估計極易受此影響進而產生偏差較大的系統誤差估計,因此,在實際應用中,應合理選取m的取值。且由實驗可知,當m取值大于90時,限定記憶方法即可達到與減消記憶方法相近的效果,這相較于減消記憶方法動輒近千的權重因子計算分配大大降低了計算量。 圖10 雷達1距離系統誤差不同限定長度誤差估計 圖11 雷達1角度系統誤差不同限定長度誤差估計 圖12 雷達2距離系統誤差不同限定長度誤差估計 圖13 雷達2角度系統誤差不同限定長度誤差估計 對海雷達在對海上目標進行探測時,雷達系統誤差在數值上主要有兩種可能性:1)誤差未知或不準確;2)分布非均勻或時變。而傳統誤差配準方法在系統誤差未知、時變情況下無法對目標狀態進行有效識別,甚至由于系統誤差估計偏離過大出現濾波發散。對此,本文將限定記憶指數加權方法應用到次優極大后驗估值器(MAP)中。充分利用組網系統中中心雷達高精度優勢,設計了一種基于自適應EKF濾波算法的時變系統誤差估計器。用以對輔助雷達的時變系統誤差進行實時估計和校準。所提限定記憶MAP估值算法具有以下優勢:1)所提遞推方法簡單靈活,且不附加任何限制條件,易于工程應用;2)能對未知、時變系統誤差進行快速、精準估計,且相對于減消記憶方法大大減少了計算量。

3.4 誤差配準框架

4 仿真實驗










5 結語
猜你喜歡
學苑創造·A版(2020年10期)2020-11-06 05:21:26兒童故事畫報(2019年5期)2019-05-26 14:26:14作文周刊·小學一年級版(2016年27期)2017-06-03 23:21:17絲綢之路(2016年9期)2016-05-14 14:36:33新湘評論·下半月(2016年4期)2016-05-05 22:12:41新湘評論·下半月(2016年4期)2016-05-05 22:12:41海外文摘(2016年4期)2016-04-15 22:28:55Coco薇(2016年2期)2016-03-22 02:42:52Coco薇(2015年1期)2015-08-13 02:47:34小雪花·成長指南(2015年7期)2015-08-11 15:03:12
