一種改進的民用GPS異步欺騙技術*
2021-02-25 04:17:28易曙明
電訊技術 2021年2期
易曙明,游 凌,李 顯
(1.信息工程大學 信息系統工程學院,鄭州450001;2.盲信號處理國家級重點實驗室,成都610041)
0 引 言
隨著信息戰和導航戰成為新的作戰方式,針對民用GPS的欺騙成為了一個研究熱點[1-6]。目前民用GPS欺騙主要分為轉發式欺騙和生成式欺騙。其中生成式欺騙能夠根據欺騙意圖調整導航電文參數,自主產生高精度導航信號,對GPS接收終端具有更大威脅。
無論是轉發式欺騙還是生成式欺騙,由于擴頻碼的相關特性,必須保證欺騙信號到達接收機天線處偽碼相位與真實信號對齊,才會影響接收機跟蹤狀態。因此根據信號是否同步有異步和同步兩種攻擊方式。異步攻擊的一種實現是通過大功率壓制使接收機進入重捕獲,欺騙信號憑借功率優勢誘捕。此種方式由于GPS系統的擴頻處理增益以及改進,需要付出很高的功率代價,逐漸變得難以實施。另一種攻擊方式最先出現在文獻[7]中針對直擴通信相干干擾提出的靈巧干擾方法,通過改變信號偽碼速率,生成滑動的靈巧干擾信號,實現偽碼相位的自動對齊。文獻[8]將該技術應用于欺騙導航接收機,并分析了成功欺騙的功率要求,在4 dB的欺騙增益下,可在最長50 min破壞接收機的跟蹤狀態。文獻[9]采用偽碼滑動技術欺騙處于跟蹤階段的接收機,并盡量規避RAIM(Receiver Autonomous Integrity Monitoring)預警。文獻[10]研究了滑動過程的功率控制,指出只要欺騙信號具有功率優勢就可實現接收機的牽引,且欺騙功率不宜過大。文獻[11]將生成式欺騙應用于無人機誘捕,采用壓制接入的方式實現了對無人機的誘捕。
由于生成式欺騙技術細節復雜,公開文獻雖對其進行了不同程度的研究,但大多停留在理論分析和軟件仿真驗證,實際環境的測試和驗證缺乏;偽碼滑動是解決碼相位同步的一種手段,但現有研究關注在成功欺騙的方法和功率條件以及欺騙策略上,未對信號參數對欺騙信號的功率影響進行理論分析,且沒有考慮欺騙信號與真實信號的碼片超前滯后問題,導致欺騙起效時間具有不確定性。針對上述問題,本文通過對GPS欺騙問題建模,分析了欺騙信號和真實信號碼片誤差的影響因素,推導了信號參數對偽碼相關峰值的影響公式,針對碼片誤差較大情況下提出了多路并發滑動的方法,并通過碼片誤差滯后擴展解決了碼相位超前滯后模糊問題,與傳統單路滑動技術對比,具有起效時間更短、欺騙更可靠的特點。
1 欺騙問題建模分析
1.1 欺騙模型
GPS欺騙的基本原理是使接收機解算錯誤的偽距得到錯誤的定位信息。構造如圖1所示的欺騙場景。
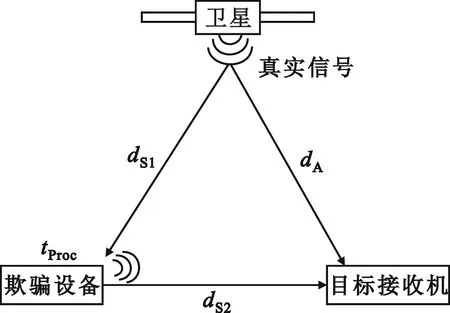
圖1 欺騙場景
依據文獻[12],偽距的篡改體現在傳輸時間上,而GPS接收機處理導航數據獲取衛星信號發射時刻主要依靠Z計數、比特計數、CA碼整周計數和CA碼相位四步完成。因此欺騙設備在構造欺騙信號的調整時延時可以將其體現在欺騙信號CA碼初始相位的超前和滯后上。
1.2 誤差分析
由1.1小節可知,欺騙設備的核心就是調整欺騙信號傳輸時間,對于生成式欺騙可以結合導航電文修改和欺騙信號CA碼初始相位的超前滯后實現欺騙信號、真實信號在目標接收機處碼相位對齊。然而,要實現上述過程,每一環節都必須精準無誤差,而事實上實現這一點是具有很大難度的。下面對欺騙信號初始碼相位調整過程中可能涉及的誤差做簡單分析。
(1)對流層傳輸延遲
GPS信號在傳輸穿越對流層時,傳輸路徑會由于對流層作用發生彎曲,從而使接收機解算位置時的距離測量產生誤差。對流層的延遲與衛星的仰角密切相關,一般在天頂方向時誤差為2~3 m,在水平方向時,對流層導致的傳輸延遲可以達到約25 m。
(2)電離層傳輸延遲
GPS信號作為一種電磁波信號,在大氣中傳輸穿越電離層時會存在一定的延遲。目前公開的研究資料表明,電離層對GPS的傳輸延遲體現在距離上誤差在天頂方向可達50 m,在水平方向可達150 m。
(3)衛星時鐘誤差
GPS衛星配備了高精度原子鐘,在工作過程中,相對而言比較穩定,但仍然存在一定的時鐘偏差和頻率漂移。地面站在對各衛星進行監測的過程中,會在導航電文中傳輸衛星時鐘偏差、衛星時鐘頻率漂移和衛星時鐘頻率漂移速度,接收機在位置解算過程中可以對其進行補償,因此此項可忽略。
(4)接收機時鐘誤差
接收機本地時鐘和GPS系統時間存在一定的誤差,這個誤差在正常解算偽距時會通過定位方程進行修正,但在進行欺騙、已知偽距反向推算時間時,這個鐘差可以導致最大約為10 m的誤差。
(5)探測系統對目標位置的定位誤差
目前,欺騙方對目標位置的探測一般通過雷達探測、光電觀測和無線電偵測等手段,三者的應用場景均有一定限制,且定位精度具有一定限制。而GPS欺騙中,對目標位置定位存在的誤差會導致欺騙信號和真實信號碼相位有一定延遲。當定位距離誤差從500 m變化到3 km,對應的碼片相位誤差將達到將近10個碼片。
綜上所述,在可能影響欺騙信號初始碼相位調整的誤差之中,探測系統對目標位置的定位距離誤差是最大的一個。
2 滑動牽引入鎖
2.1 滑動牽引原理
為解決欺騙信號和真實信號碼片誤差帶來的同步問題,根據文獻[7-8],采用碼片滑動實現欺騙信號與真實信號偽碼相位的自動同步。圖2描述了基于碼片滑動原理的欺騙信號牽引入鎖過程,3個紅色點值分別表示超前、即時、滯后三支路的輸出相關值。
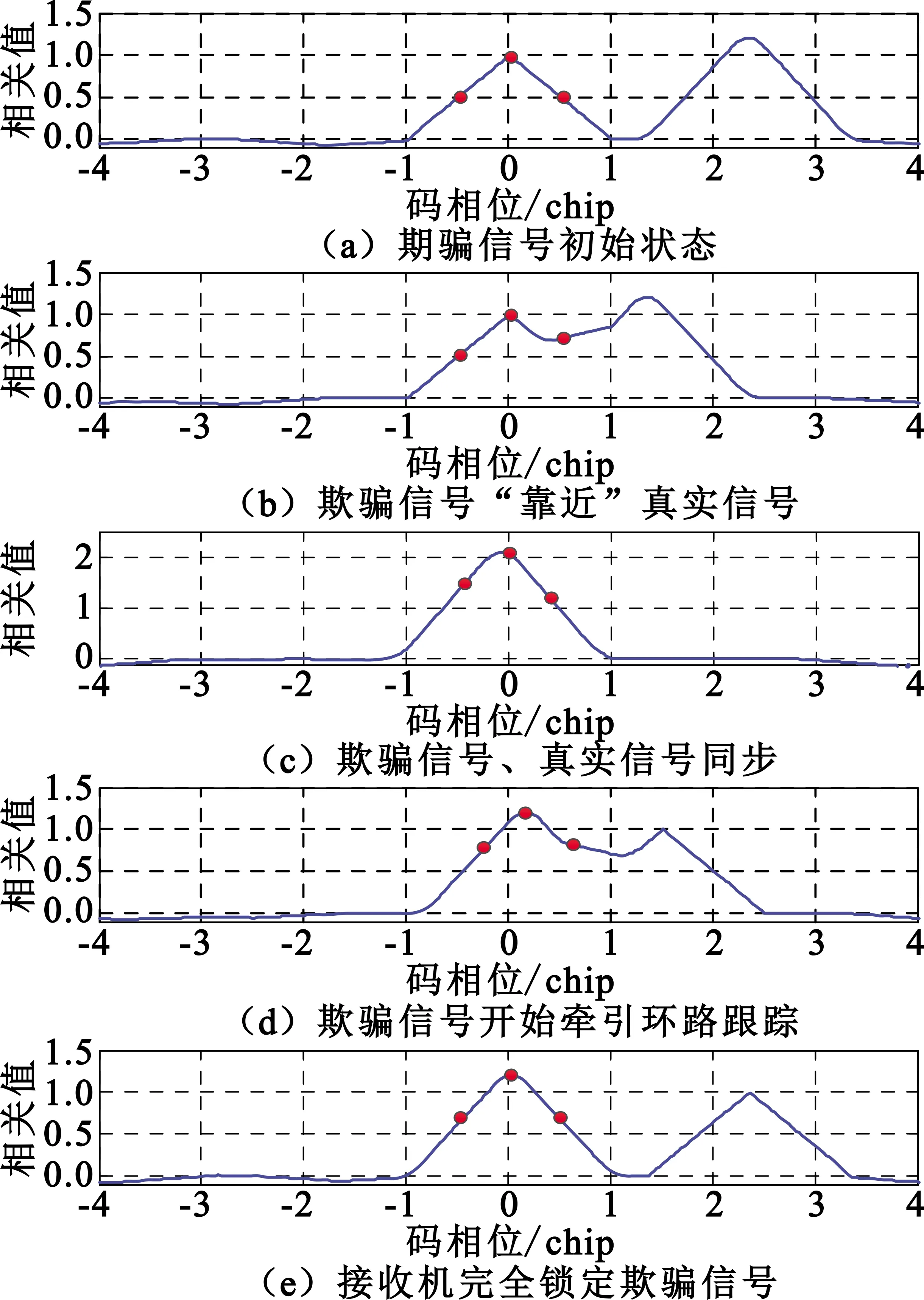
圖2 偽碼滑動入鎖過程
如圖2(a)所示,接收機超前、即時、滯后三條支路已跟蹤鎖定真實信號,欺騙信號與真實信號碼相位誤差大于2個碼片,對接收機狀態不產生影響;圖2(b)表示欺騙信號已逐漸靠近真實信號;圖2(c)表示真實信號與欺騙信號在碼相位上已對齊;圖2(d)表示由于功率優勢,接收機跟蹤環路轉而跟蹤上欺騙信號,并由于欺騙信號與真實信號存在的相對滑動,兩者逐漸遠離;圖2(e)表示接收機已完全跟蹤鎖定欺騙信號,并且欺騙信號與真實信號的碼片差已經大于2個碼片,真實信號對接收機跟蹤狀態不再產生影響,在一定時間后,真實信號和欺騙信號雖然會再次進行碼相位對齊,但由于真實信號功率低于欺騙信號,因此不會影響接收機對欺騙信號的跟蹤狀態。
由圖2及上文可知,對于具有功率優勢的欺騙信號,只要修改其偽碼速率,就能產生相對滑動的相關峰,實現偽碼相位自動同步,并牽引接收機跟蹤欺騙信號。文獻[8,11]對滑動同步原理做了細致的理論證明,指出只要進入接收機的欺騙信號功率大于真實信號,即可牽引接收機跟蹤。
2.2 滑動牽引入鎖的功率損失分析
由于滑動入鎖技術涉及修改信號參數,下面就信號參數對相關峰值的影響進行了理論推導,可為實際應用參數選擇提供指導。
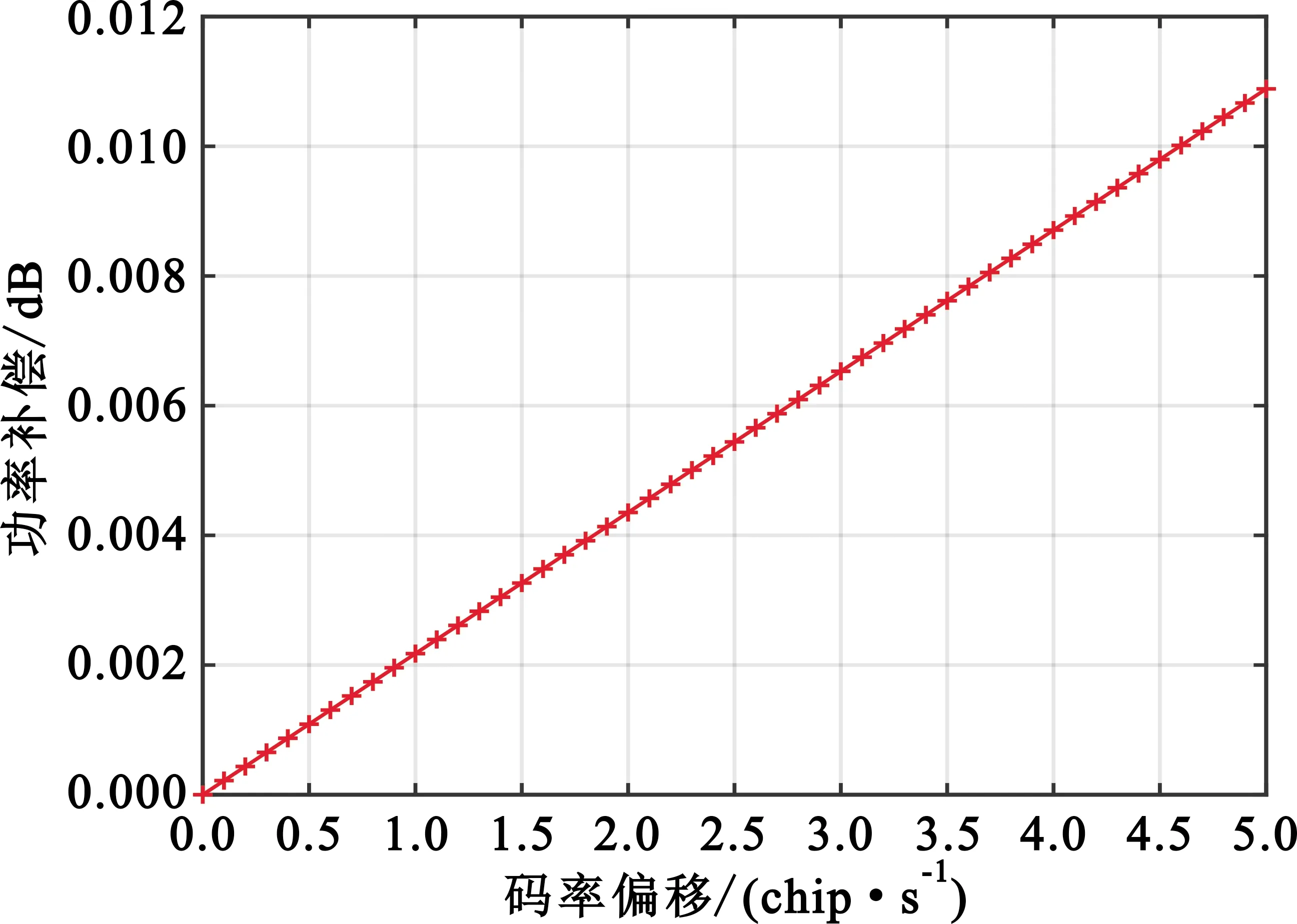
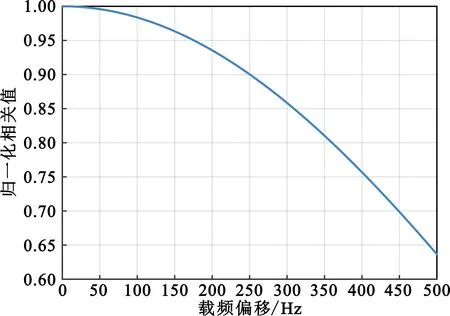
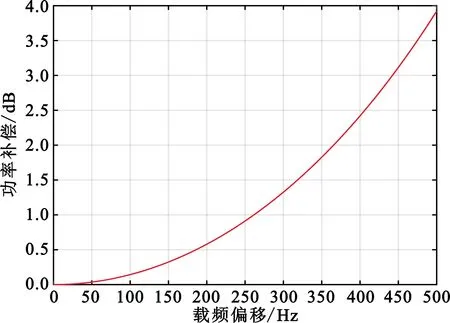
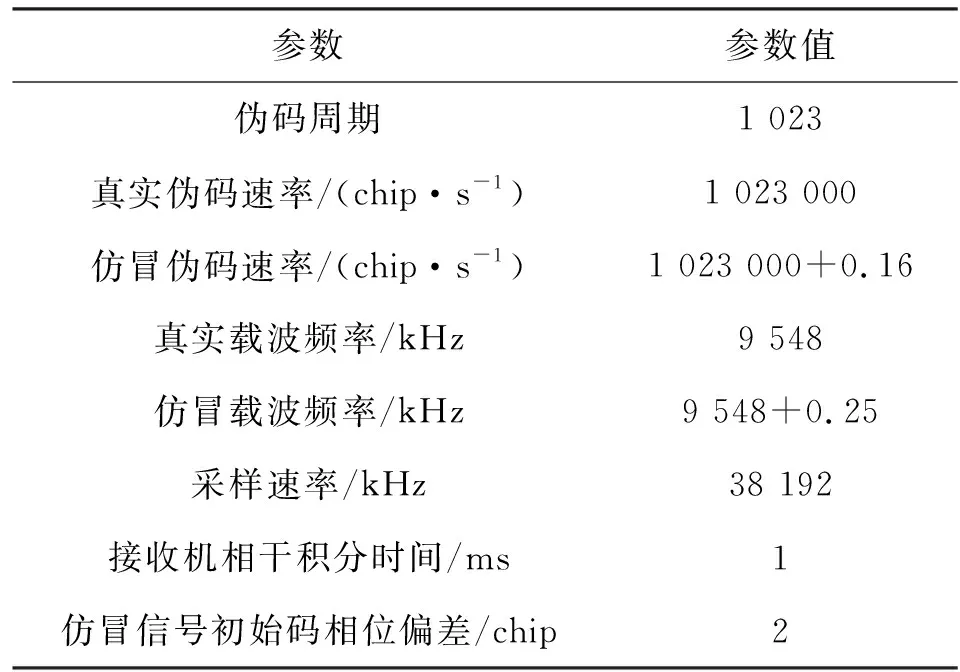
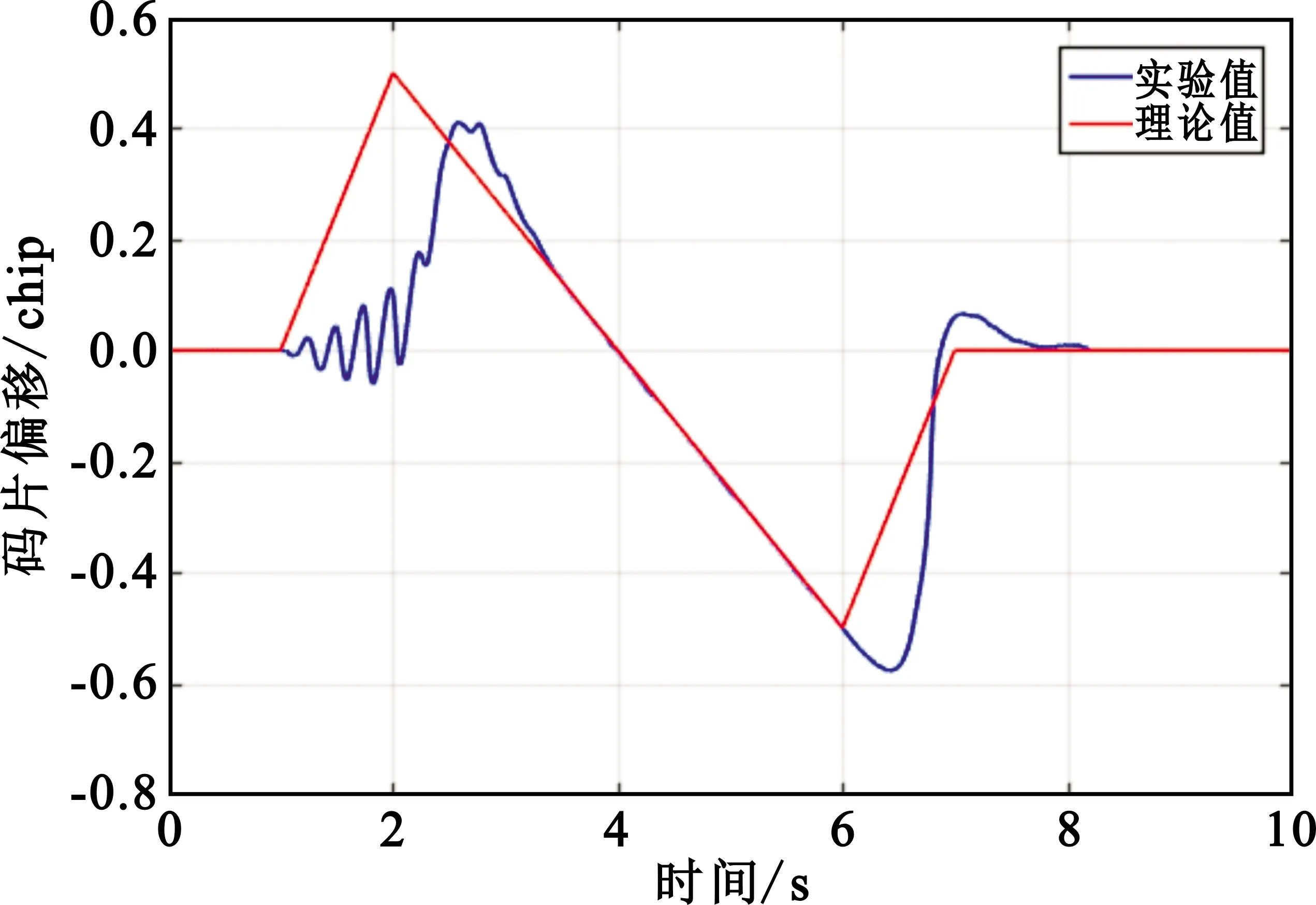
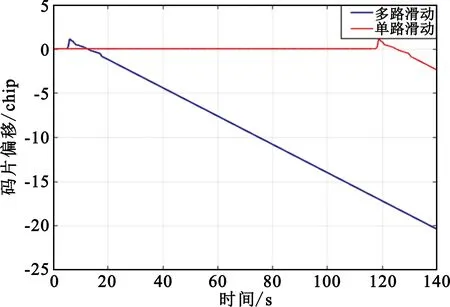
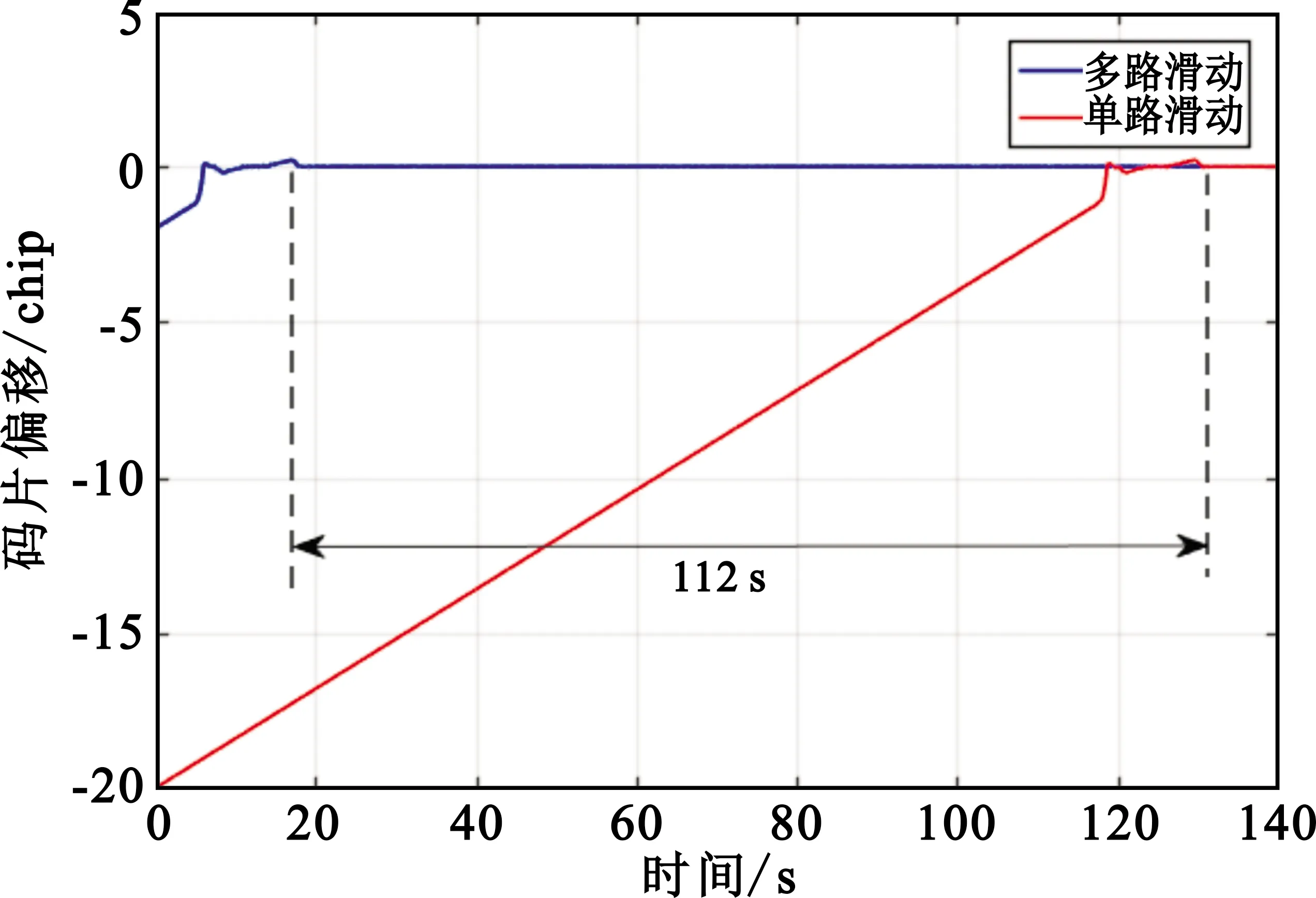
假設GPS接收機已經跟蹤上真實信號,分析偽碼速率的改變對相關峰值的影響。令真實信號偽碼碼元寬度為TActual,欺騙信號偽碼碼元寬度為TSpoof。當TSpoof 設Δ=TActual-TSpoof,則有 (1) (2) 式(1)括號中第二項是錯位部分的貢獻值,因為不同的偽碼這部分值不同,所以該項采用期望值來代替: (3) 又因為ck為偽隨機碼,ck、ck+1和k相互獨立,根據偽隨機碼的性質,對于雙極性非歸零型二元偽碼序列,有E(ck)=E(ck+1)=1/N,所以由式(3)可得 (4) 聯立式(2)和式(4)可知相關值為 (5) (6) 采用前面推導的思想,由式(6)可推導得出 (7) 當i=1時,a=0,b=M,式(7)就是式(5)。實際上,當i=N/2時,相關值最大,此時中心左右兩部分碼片對齊狀態一致。此時,認為中心左右的碼片為第一個碼片,該碼片和本地偽碼有TActual-Δ-Δ/2的寬度對齊,Δ+Δ/2的寬度未對齊;第二個碼片則有TActual-2Δ-Δ/2的寬度對齊,2Δ+Δ/2的寬度未對齊。設此種情況下,仍有M個碼片有交疊,有N-M個碼片在時間上已完全錯開。由于中心對稱,因此計算一半即可。令d=min((N-1)/2,M),計算得該情況下相關值為 (8) 上述分析表明偽碼速率的改變將會導致相關值的損失,但該損失是可計算可預見的,可以通過增加欺騙信號的發射功率進行補償。采用干信比(Jamming-to-Signal Ratio)對其進行衡量: (9) 根據式(9)可知,對于已知偽碼速率、偽碼周期的GPS系統,根據欺騙方案中設定的偽碼速率偏移值就可以求解出成功實現滑動入鎖的最小干信比。由于GPS信號載頻和碼率來自一個時鐘源,兩者保持1 540倍的比例變化關系,且受接收機跟蹤環路帶寬限制,所以在實際應用中選擇的偽碼速率偏移值較小。 圖3給出了偽碼速率偏移5 chip/s內的相關值變化值和其對應的功率補償值,可以看出5 chip/s偏移范圍內相關值變化不大,最小值為0.998 7,其對應的功率補償值為0.010 9 dB,因此實際應用中碼率變化造成的相關峰值損失基本可以忽略不計。此時考慮載頻具有偏差Δf,則相關值為 (10) (a)相關值損失 (b)功率補償值圖3 碼率變化帶來的相關值損失和對應的功率補償值 由于sinc(Δf/RB)≈1,因此式(10)可以寫為 (11) 對應的JSR為 (12) 從圖4中可以看出,500 Hz偏移范圍內相關值變化較大,對應的最大功率補償值接近4 dB,因此載頻偏移對相關峰值損失占主要因素。假設實際應用中Δf=250 Hz時,對應的碼率偏移為RBΔ=Δf/1540≈0.16 chip/s,此時載頻偏差所需的功率補償值為0.912 1 dB,而碼率偏差所需的功率補償值僅為0.000 3 dB,因此實際應用中應考慮載頻偏差為功率損失的主要因素。 (a) 相關值損失 (b)功率補償值圖4 載頻變化帶來的相關值損失和對應的功率補償值 實際工程應用中,無法判斷自主產生的欺騙信號與真實信號偽碼相位的超前滯后關系。當探測系統定位最大距離誤差為3 km,在將滑動速度確定為增加欺騙偽碼速率時,理論最短滑動時間為t=10/RBΔ,最長滑動時間為t=(1 023-10)/RBΔ,當RBΔ=0.16 chip/s時,分別為62.5 s和6 331.25 s,兩者差距明顯,各占0.5的概率,可見超前滯后模糊將會導致欺騙起效時間的二值性,直接造成起效時間顯著增加。 為增強實際工程設備的應用效果,解決偽碼相位超前滯后模糊帶來的起效時間二值性,本文提出碼片誤差滯后擴展處理技術,通過對欺騙信號構造時的初始碼相位進行碼片誤差向滯后方向擴大處理,即假設已知誤差范圍為[-10 chip,10 chip],將誤差基準化,向滯后方向擴展10 chip誤差,將誤差范圍更改為[0,20 chip],確保欺騙信號滯后于真實信號。 圖5為目標-欺騙設備-衛星三維空間關系的簡化模型,將時延計算等效簡化為一維關系。綠點代表目標真實位置。由于探測系統的定位精度,導致計算時延后構造的欺騙信號最大可能超前或滯后真實信號3 km(10 chip)。此時通過控制延時,將欺騙信號初始碼相位滯后10 chip,能夠保證欺騙信號與真實信號的碼相位關系為滯后0~20 chip,保證了欺騙信號的滑動方向。 圖5 空間關系簡化模型 為了縮減由于擴大滑動距離帶來的滑動時間代價,本文采用多路并發信號代替單路信號,即通過空間資源消耗換取時間上的增益,將原本每顆星的單路信號可能需要滑動距離20 chip平均分發給多路信號,單路信號滑動的距離就能得到相應的減少,以便欺騙信號更快實現碼相位同步。整個欺騙過程具體流程如下: Step1 時基同步,保證欺騙設備本地時鐘與衛星系統時間同步。 Step2 欺騙系統根據接收機概略位置計算可見衛星。 Step3 根據衛星信號傳輸時間、欺騙信號初始時間、系統處理時延等計算欺騙信號各顆可見衛星偽碼初始相位。 Step4 根據欺騙距離估計傳輸路徑功率損耗,并通過預設的欺騙信號參數計算欺騙功率增益。 Step5 擴頻調制生成各顆可見衛星信號并合成一路信號,通過時延線處理,實現多路欺騙信號的發射。 Step6 效能評估,觀察目標接收機的應激反應。 為驗證滑動牽引入鎖理論的正確性以及可實踐性,分別采用軟件接收機、商用接收機、移動定位終端對碼片誤差滯后擴展的多路滑動技術進行驗證。 采用GPS軟件接收機模擬靜態接收機進行滑動欺騙技術的原理性驗證,實驗參數設置如表1所示。 表1 實驗1仿真參數 由設置的仿真參數,利用式(9)和式(12)求得成功欺騙所需最小功率補償值為大于0.912 1 dB。將欺騙信號損失功率補償后,分別以不同功率實驗,將實驗結果與文獻[8]所述理論結果進行對比,如圖6~8所示。 (a)真實信號與本地復現碼相位差 (b)欺騙信號與本地復現碼相位差圖6 欺騙信號相關峰值等于真實信號相關峰值 (a)真實信號與本地復現碼相位差 (b)欺騙信號與本地復現碼相位差圖7 欺騙信號相關峰值等于1.25倍真實信號相關峰值 (a)真實信號與本地復現碼相位差 (b)欺騙信號與本地復現碼相位差圖8 欺騙信號相關峰值等于2.5倍真實信號相關峰值 圖6中當欺騙信號和真實信號相關峰值相等時,接收機本地復現偽碼在一定時間的抖動后與真實信號偽碼相位差保持為0,而與欺騙信號逐漸變大,此時欺騙失敗。當增加欺騙干信比,使欺騙信號相關峰值大于真實信號相關峰值,如圖7和圖8所示,在欺騙信號逐漸滑動靠向真實信號時,本地復現碼開始出現抖動,并且經過一定作用時間后,本地復現碼與真實信號的偽碼相位差從0逐漸變大,而與欺騙信號的偽碼相位差最終保持為0,說明最終欺騙信號成功被接收機跟蹤,滑動入鎖成功。同時,對比圖7和圖8可以發現,隨著干信比的增大,能在一定程度上影響欺騙起效時間。實驗值均與理論值對比,除了跳變點,整體趨勢一致,仿真與理論相符。實際應用中,可根據估計真實信號功率確定欺騙生效功率;再根據欺騙參數選擇,結合2.2節理論分析結果對損失功率進行補償。 為了驗證碼片誤差滯后擴展處理對欺騙信號滑動入鎖效能的改進,設置兩組欺騙實驗,每組信號與真實信號的初始碼片誤差隨機設置為[-2 chip,2 chip]中的一值來模擬實際應用場景中初始碼相位的超前滯后模糊問題,欺騙功率增益為2 dB,其他參數設置同表1。對A組信號采用初始碼片誤差滯后擴展處理,B組不做處理,仿真信號時長為100 s,通過欺騙信號在仿真時長內是否入鎖成功來判斷欺騙信號初始時刻是超前還是滯后真實信號,實驗結果如表2所示。 表2 實驗2實驗結果 實驗結果表明,通過碼片誤差滯后擴展處理,能夠保證欺騙信號初始滯后于真實信號,在增加欺騙碼率時,欺騙信號能夠在最快時間內與真實信號同步。 當欺騙信號和真實信號初始碼片誤差達到10個碼片時,再擴大初始碼片誤差到最大20個碼片,通過多路并發滑動技術,選擇并發數為10,可將偽碼相對滑動時間限制在最大為2個碼片,而單路滑動則仍需要20個碼片。設置實驗參數如表1所示,僅將初始碼相位差改為20 chip,欺騙功率增益為2 dB。分別采用多路并發滑動和單路滑動對已經穩定跟蹤真實信號的靜態接收機進行欺騙,仿真結果如圖9所示。 (a)真實信號碼相位差對比 (b)欺騙信號碼相位差對比圖9 多路滑動與單路滑動起效時間對比 欺騙起效時間的理論值分別為12.5 s和125 s,實際上,從圖9中可以看到當采用多路滑動策略時,19 s左右時,接收機完全穩定跟蹤欺騙信號,而采用單路滑動策略,則大約需要131 s接收機才能穩定跟蹤欺騙信號。考慮誤差體現在對接收機牽引過程上,且圖9標注時間為確定接收機完全穩定跟蹤欺騙信號,因此具有一定誤差。無論從理論還是實驗的角度,多路和單路滑動的起效時間差均約為112 s,因此多路滑動策略在欺騙起效時間上存在顯著優勢。 為驗證本文提出方法在實際應用中的可行性和工程可實現性,通過導航信號模擬源進行實際場景驗證。實驗設置欺騙信號功率高于真實信號2 dB,偽碼速率快0.2 chip/s,初始偽碼相位差為2 chip,設置接收機靜態位置為(30.6469N,104.0451E),欺騙信號于真實信號播發60 s后發射,前30 s位置為(30.6469N,104.0451E),確保欺騙信號能夠滑過滯后的碼片,通過功率優勢牽引接收機入鎖;而后將欺騙信號定位位置設置為(30.6469N,104.0451E)到(30.6442N,104.0392E)的一段動態路徑,便于直觀感受欺騙實驗結果。接收機分別采用中科微電子ATGM332D和某型智能手機。實驗結果如圖10所示。 圖10 動態位置欺騙實驗結果 從入鎖前后的接收信號載噪比差2 dB可以初步判斷欺騙信號已被接收機無感接收,從定位結果反映的動態軌跡證明欺騙信號被接收機正常接收并影響了接收機的定位解算,欺騙有效。 本文提出的針對民用GPS異步欺騙改進技術可以定量化計算信號參數對于欺騙信號功率損失的影響。通過碼片誤差滯后擴展處理,解決了實際工程應用中構造欺騙信號存在的偽碼相位超前滯后模糊問題,能保證在最短時間實現偽碼同步。采用多路并發滑動取代傳統的單路滑動技術,克服由于擴展碼片誤差帶來的滑動時間代價,并對目標定位引導數據不敏感。仿真實驗條件下,250 Hz的載頻偏移條件下所需干信比為0.912 1 dB,3 km定位誤差下,0.16 chip/s的相對滑動速度,能夠實現欺騙信號穩定入鎖,且通過實際設備測試,驗證該方法工程可實現。所提欺騙方法具有隱蔽、可靠的特點,對實施GPS欺騙研究具有很好的指導作用。






2.3 欺騙策略

3 仿真驗證
3.1 基于滑動入鎖原理的GPS欺騙實驗


3.2 碼片誤差滯后擴展處理性能驗證
3.3 多路并發滑動與單路滑動起效時間對比
3.4 動態位置欺騙實驗

4 結 論
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
中學生數理化·中考版(2022年11期)2022-02-16 07:01:20
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
中國生殖健康(2019年3期)2019-02-01 06:12:26
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00