穴盤苗移栽機(jī)自動(dòng)取苗技術(shù)研究現(xiàn)狀與展望*
2021-02-22 11:34:04王寧任玲李江全胡海鵬汪博文尚晉
中國農(nóng)機(jī)化學(xué)報(bào) 2021年1期
王寧,任玲,李江全,胡海鵬,汪博文,尚晉
(1. 石河子大學(xué)機(jī)械電氣工程學(xué)院,新疆石河子,832003; 2. 農(nóng)業(yè)農(nóng)村部西北農(nóng)業(yè)裝備重點(diǎn)實(shí)驗(yàn)室,新疆石河子,832003)
0 引言
穴盤育苗移栽具有提高幼苗質(zhì)量,延長作物生長期,避開幼苗的冷凍、干燥時(shí)期等優(yōu)點(diǎn)[1-2]。2018年我國蔬菜種植面積達(dá)到20 439 khm2,蔬菜產(chǎn)量達(dá)70 347.72 萬t[3],育苗移栽已成為蔬菜花卉生產(chǎn)的主要種植方式[4]。在20世紀(jì)穴盤育苗技術(shù)就得到了比較廣泛運(yùn)用,集中育苗和規(guī)模化生產(chǎn)成為主要方式,育苗商品化已形成趨勢[5-6]。
近些年來我國農(nóng)業(yè)機(jī)械水平逐步提高,我國農(nóng)業(yè)已經(jīng)逐步從手工作業(yè)漸漸轉(zhuǎn)變?yōu)闄C(jī)械自動(dòng)化作業(yè)[7]。目前我國移栽作業(yè)主要以人工操作和半自動(dòng)機(jī)械操作為主,移栽勞動(dòng)強(qiáng)度大、效率低、成本高,機(jī)械化效益不明顯[8-9]。
全自動(dòng)移栽機(jī)能很好地解決勞動(dòng)力不足、勞動(dòng)強(qiáng)度大、作業(yè)效率低等問題。目前國外已有全自動(dòng)移栽機(jī)應(yīng)用到農(nóng)業(yè)生產(chǎn)中,而國內(nèi)還未見推廣使用,還以半自動(dòng)移栽機(jī)為主。全自動(dòng)移栽機(jī)采用自動(dòng)取苗機(jī)構(gòu),利用自動(dòng)取苗技術(shù)替代人工喂苗,取苗機(jī)構(gòu)是區(qū)分移栽機(jī)是全自動(dòng)還是半自動(dòng)的關(guān)鍵,也是全自動(dòng)移栽機(jī)的核心裝置。由于全自動(dòng)移栽機(jī)的取送苗機(jī)構(gòu)較為復(fù)雜,而自動(dòng)取苗技術(shù)也隨著取苗機(jī)構(gòu)的不同而變化。自動(dòng)取苗技術(shù)的研究,對于全自動(dòng)移栽機(jī)的發(fā)展起著積極的推動(dòng)作用。
本文綜述了穴盤苗自動(dòng)取苗技術(shù)研究現(xiàn)狀,對目前的自動(dòng)取苗方式進(jìn)行分類,針對每一類的控制方法進(jìn)行闡述,指出了目前穴盤苗機(jī)械化移栽中,自動(dòng)取苗技術(shù)存在的問題,對取苗技術(shù)及移栽機(jī)的發(fā)展提出建議,為今后全自動(dòng)移栽機(jī)研制提供參考。
1 穴盤苗自動(dòng)取苗技術(shù)現(xiàn)狀
國外移栽機(jī)發(fā)展較早,早在20世紀(jì)20年代,歐洲、日本等一些國家在開始研發(fā)秧苗栽植機(jī)械,經(jīng)過一個(gè)世紀(jì)的發(fā)展,國外對移栽機(jī)的研究己進(jìn)入自動(dòng)化階段。如日本幾大主要農(nóng)機(jī)企業(yè)研制出了多款穴盤苗自動(dòng)移栽機(jī)[10-13]。如荷蘭PC21型全自動(dòng)移栽機(jī)[14],還有美國TEA XP404N型移栽機(jī)[15];美國RTW系列穴盤苗全自動(dòng)移栽機(jī)等。
我國生產(chǎn)的移栽機(jī)主要以半自動(dòng)移栽機(jī)為主,如:新疆農(nóng)科院獨(dú)立研制的2ZT-2型移栽機(jī)、中國農(nóng)業(yè)大學(xué)研制的2ZDF型半自動(dòng)導(dǎo)苗管式移栽機(jī)、安徽滁州農(nóng)機(jī)研究所完成研制的2ZY-2型油菜移栽機(jī)等[16]。通過對國內(nèi)外移栽作業(yè)和取苗作業(yè)相關(guān)參數(shù)的研究對比(表1),我國移栽機(jī)的自動(dòng)化水平還處于起步階段,國內(nèi)全自動(dòng)移栽機(jī)研究與國外還有一定的差距。
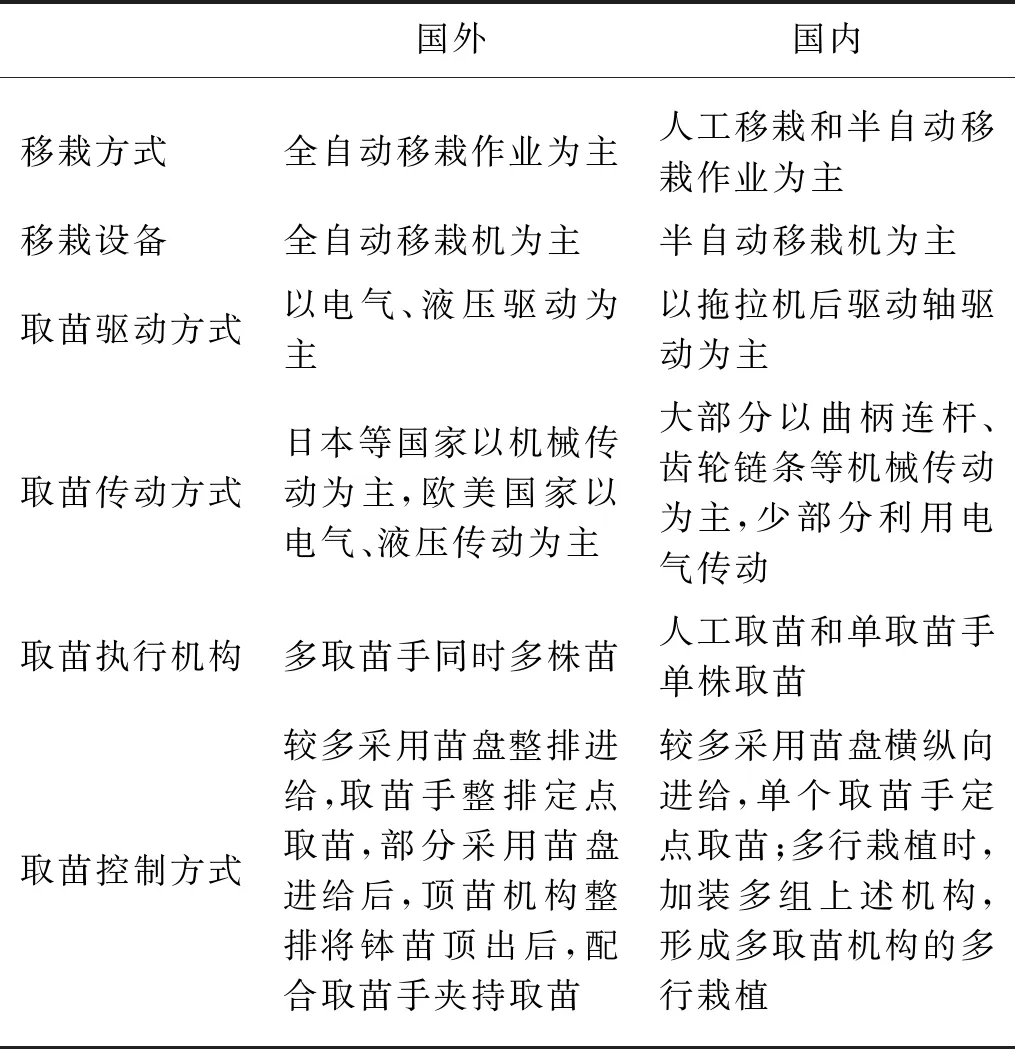
表1 國內(nèi)外取苗技術(shù)研究對比
從穴盤中自動(dòng)取苗作為全自動(dòng)移栽機(jī)最為核心的部分,取苗的成功與否直接影響到后續(xù)工作的能否正常運(yùn)行。目前穴盤取苗主要采用的是機(jī)械手或苗針手夾取式取苗,后來出現(xiàn)利用頂桿從苗盤底部小孔頂出式取苗,又出現(xiàn)利用氣流通過苗盤底部小孔氣吹式取苗。根據(jù)國內(nèi)外現(xiàn)有的自動(dòng)取苗控制方式大致有五種方式:(1)移動(dòng)苗盤供苗,固定取苗手定點(diǎn)取苗,稱為移盤固手型;(2)苗盤固定,移動(dòng)取苗手全盤取苗,稱為固盤移手型;(3)移動(dòng)苗盤供苗,同時(shí)移動(dòng)取苗手取苗,稱為移盤移手型;(4)移動(dòng)苗盤供苗,頂桿頂苗取苗,稱為移盤頂苗型;(5)移動(dòng)苗盤供苗,噴嘴吹苗取苗,稱為移盤吹苗型。
1.1 移盤固手型取苗控制
通過苗盤進(jìn)給機(jī)構(gòu)控制苗盤供苗到達(dá)取苗位置,后由取苗手定點(diǎn)從苗盤將缽苗取出,取苗手位置固定,一般采用機(jī)械連桿機(jī)構(gòu)帶動(dòng)機(jī)械手在取苗點(diǎn)與放苗點(diǎn)擺動(dòng),將這樣一種控制方式稱為移盤固手型。如果取苗手是單株取苗,需要苗盤S形進(jìn)給苗盤,則需要控制苗盤在橫縱兩個(gè)方向的移動(dòng);如果取苗手是整排取苗,只需要苗盤在一個(gè)方向上的進(jìn)給[17]。
這種取苗方式也比較常見,單株取苗的如洋馬推出的PF2R型乘坐式全自動(dòng)蔬菜移栽機(jī)[18](圖1),該移栽機(jī)需要控制苗盤橫縱兩個(gè)方向的進(jìn)給,使每一顆缽苗到達(dá)取苗點(diǎn),采用取苗手旋轉(zhuǎn)臂帶動(dòng)取苗針定點(diǎn)取苗,旋轉(zhuǎn)一定角度后定點(diǎn)投苗到栽植器中,該裝置能夠?qū)崿F(xiàn)兩行同時(shí)作業(yè)。還有周瑩等設(shè)計(jì)的旱地穴盤苗自動(dòng)移栽機(jī)[19],PLC作為核心控制器,各部件利用位置傳感器,實(shí)時(shí)監(jiān)測位置信號(hào)。采用兩個(gè)步進(jìn)電機(jī)控制移箱橫縱向移動(dòng),使苗盤準(zhǔn)確到達(dá)取苗點(diǎn),機(jī)械手固定,機(jī)械連桿配合定點(diǎn)取苗,定點(diǎn)投苗,到達(dá)投苗位將缽苗釋放到接苗杯中。

圖1 PF2R型取苗機(jī)構(gòu)
整排取苗的例如美國RTW型秧苗移栽機(jī)[20](圖2),該機(jī)通過控制苗盤的橫向進(jìn)給,配合整排機(jī)械手定點(diǎn)取苗,取苗速度快,適應(yīng)性強(qiáng)。石河子大學(xué)崔財(cái)豪等設(shè)計(jì)的移栽機(jī)整排取送苗機(jī)構(gòu),使苗盤第一排與輸送接苗帶相互垂直,擺位氣缸控制整排取苗手在苗盤與接苗帶位置轉(zhuǎn)換,傳感器模塊采集各部件的信息信號(hào)反饋給控制器;取苗時(shí),步進(jìn)電機(jī)控制苗盤每次進(jìn)給一排,取苗氣缸控制整排取苗手插入穴盤中,夾苗氣缸實(shí)現(xiàn)缽苗的夾持,取苗動(dòng)作由取苗氣缸和夾苗氣缸共同作用完成。

圖2 RTW型取苗機(jī)構(gòu)
1.2 固盤移手型取苗控制
苗盤固定,通過控制取苗手到達(dá)苗盤取苗位置后由取苗手從苗盤將缽苗取出,將這樣一種控制方式稱為固盤移手型。如果取苗手是單株取苗,需要取苗手S形移動(dòng)到每個(gè)缽苗的位置上方后立向移動(dòng)取苗,則需控制取苗手橫向、縱向、立向三個(gè)方向的移動(dòng);如果取苗手是整排取苗,需要取苗手橫向移動(dòng)到每排缽苗的位置上方后立向移動(dòng)取苗,則需取苗手在縱向、立向兩個(gè)方向上的移動(dòng)[21]。
采用單株取苗由于需要控制取苗手三個(gè)方向的移動(dòng),控制較復(fù)雜且效率低,所以采用這種方式的較少,采用整排取苗的較多。例如澳大利亞XT616型自動(dòng)移栽機(jī)[22]是茶樹苗專用移栽機(jī),采用 PLC實(shí)現(xiàn)對步進(jìn)電機(jī)、氣缸等驅(qū)動(dòng)裝置的自動(dòng)控制,該機(jī)采用整排指針式結(jié)構(gòu)取苗爪,移栽作業(yè)時(shí),控制整排取苗手縱向移動(dòng)至穴盤第一排,立向移動(dòng)取苗手抓取缽苗基質(zhì)塊,依次縱向移動(dòng)至下一排整排取苗直至取完整盤。如李樹峰等設(shè)計(jì)的整排取送苗裝置[23](圖3),采用PLC實(shí)現(xiàn)對步進(jìn)電機(jī)、氣缸的控制,加入自適應(yīng)模糊PID控制算法對機(jī)械手水平定位控制。移栽作業(yè)時(shí),通過送苗直線模組和取苗直線模組帶動(dòng)整排取苗機(jī)械手,實(shí)現(xiàn)縱向和立向兩個(gè)方向的移動(dòng)。取苗機(jī)械手配合夾苗氣缸、退苗氣缸完成夾苗和退苗過程。
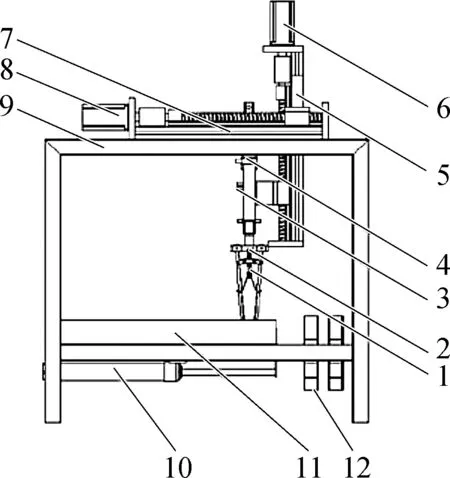
圖3 整排取送苗裝置
1.3 移盤移手型取苗控制
控制苗盤一排一排進(jìn)給,同時(shí)控制取苗手到達(dá)取苗位置后從苗盤將缽苗取出,將這樣一種控制方式稱為移盤移手型。當(dāng)苗盤一排一排進(jìn)給后,如果取苗手是單株取苗,取苗手直線移動(dòng)到每個(gè)缽苗的位置取苗,則需控制取苗手橫向、立向兩個(gè)方向的移動(dòng);如果取苗手是整排取苗,取苗手在取苗位置整排取苗,只需取苗手在立向一個(gè)方向上的移動(dòng)[24]。
移盤移手型將取苗手動(dòng)作簡化分配到苗盤動(dòng)作,苗盤和取苗手同時(shí)動(dòng)作節(jié)省了時(shí)間,簡化了控制過程,也是現(xiàn)在采用較多的取苗方式。由于單株取苗效率不高等原因,采用單株取苗較少,而采用整排取苗的較多。
采用單株取苗的有,韓綠化等設(shè)計(jì)了一種全自動(dòng)溫室缽苗移栽機(jī)[25],采用激光光電開關(guān)和接近開關(guān)檢測位置信號(hào),傳輸給TOP5530R型三軸運(yùn)動(dòng)控制器,電動(dòng)機(jī)轉(zhuǎn)動(dòng)帶動(dòng)鏈輪鏈條,控制目標(biāo)盤輸送機(jī)構(gòu)一排一排進(jìn)給苗盤,電動(dòng)機(jī)驅(qū)動(dòng)直線模組的滑塊使得取苗手實(shí)現(xiàn)橫向的位移,利用無桿氣缸進(jìn)氣、回氣實(shí)現(xiàn)取苗手立向的位移,實(shí)現(xiàn)缽苗從苗盤到栽植盆的自動(dòng)化工作,效率較高。如魏新華等設(shè)計(jì)了全自動(dòng)移栽機(jī)控制系統(tǒng)[26],采用PLC(可編程邏輯控制器)為系統(tǒng)控制器,與繼電器相結(jié)合實(shí)現(xiàn)對移栽機(jī)動(dòng)作的協(xié)調(diào)控制,利用到位傳感器對機(jī)械手苗盤位置進(jìn)行標(biāo)定,零位傳感器對行星輪架的初始位置進(jìn)行標(biāo)定,編碼器測量行星輪架的轉(zhuǎn)速和累計(jì)轉(zhuǎn)角。苗盤固定平放,由步進(jìn)電機(jī)驅(qū)動(dòng)鏈條傳動(dòng)機(jī)構(gòu)控制苗盤橫向一排一排進(jìn)給。機(jī)械手采用四指夾鉗式,氣動(dòng)部件驅(qū)動(dòng)機(jī)械手整體下行、出針、苗針夾緊完成取苗。機(jī)械手橫向、立向兩個(gè)移動(dòng)實(shí)現(xiàn)單株取苗,與移盤裝置配合完成整盤喂取。
采用整排取苗的有,美國的西紅柿自動(dòng)移栽機(jī)[27],整機(jī)結(jié)構(gòu)較為復(fù)雜,取苗爪采用雙平板苗莖夾持式取苗,工作時(shí)苗盤進(jìn)給機(jī)構(gòu)缽苗成排進(jìn)給,夾持式取苗后氣動(dòng)取苗爪二次夾取,取苗機(jī)構(gòu)整排取出缽苗。荷蘭Packplanter 型自動(dòng)移栽機(jī)[27](圖4),整機(jī)的系統(tǒng)運(yùn)行由微機(jī)控制,操作簡單。取苗機(jī)構(gòu)由整排取苗爪構(gòu)成,取苗爪采用4指式結(jié)構(gòu),每個(gè)都單獨(dú)的氣缸驅(qū)動(dòng),工作時(shí),整排氣缸驅(qū)動(dòng)取苗爪取苗,性能良好。
圖4 荷蘭Packplanter型自動(dòng)移栽機(jī)
1.4 移盤頂苗型取苗控制
控制苗盤一排一排進(jìn)給,缽苗到達(dá)取苗位置時(shí),整排頂桿從苗盤底部小孔頂出式取苗,將這樣一種控制方式稱為移盤頂苗型。采用這種方式的都是整排頂苗,效率較高,被頂出的缽苗一般會(huì)由傳送帶輸送到栽植機(jī)構(gòu),或者采用夾持機(jī)構(gòu)夾取缽苗后送到栽植機(jī)構(gòu)。
移盤頂苗型可以很好地解決取苗手從苗盤夾取缽苗時(shí)夾不出、傷苗等問題,缽苗頂出苗盤后有利于提高取苗的成功率。例如意大利Futura系列自動(dòng)移栽機(jī),移栽機(jī)采用PLC作為核心控制器,取苗過程分為缽苗頂出和夾取兩部分。工作時(shí),苗盤進(jìn)給到頂苗位置,氣缸驅(qū)動(dòng)頂桿將整排缽苗頂出,后氣缸驅(qū)動(dòng)取苗手夾持缽苗基質(zhì)將缽苗成排取出,利用頂桿頂苗和取苗手夾苗配合,實(shí)現(xiàn)取苗控制。意大利Checchi & Magli自動(dòng)移栽機(jī)[28](圖5),工作時(shí),該機(jī)型是利用苗盤進(jìn)給機(jī)構(gòu)使缽苗一排一排到達(dá)取苗位置,整排頂桿將缽苗的基質(zhì)塊部分頂出,然后取苗爪通過側(cè)面抓取基質(zhì)塊取出缽苗,完成取苗控制。

圖5 意大利Checchi & Magli自動(dòng)移栽機(jī)
國內(nèi)的例如倪有亮等[29]設(shè)計(jì)的全自動(dòng)移栽機(jī),該移栽機(jī)采用PLC作為核心控制器,PP17-1觸摸面板作為上位機(jī),到位傳感器檢測各部件位置信號(hào)。苗盤縱向移動(dòng)氣缸控制苗盤一排一排進(jìn)給,采用集排式頂苗機(jī)構(gòu)在氣缸作用下向前驅(qū)動(dòng)頂苗桿并將缽苗成排頂出,取苗機(jī)構(gòu)苗夾夾片開合相向轉(zhuǎn)動(dòng)夾住缽體,完成取苗控制。王東洋、金鑫等設(shè)計(jì)的穴盤苗自動(dòng)輸送裝置[30](圖6),該裝置采用機(jī)械傳動(dòng)控制,由移栽機(jī)地輪提供動(dòng)力,苗盤在縱向輸送機(jī)構(gòu)的作用下有序、精準(zhǔn)進(jìn)給缽苗到達(dá)取苗位置,利用頂苗桿穿過苗盤底部小孔將缽苗完全頂出,與此同時(shí)夾苗機(jī)構(gòu)將缽苗夾持住,完成取苗控制。
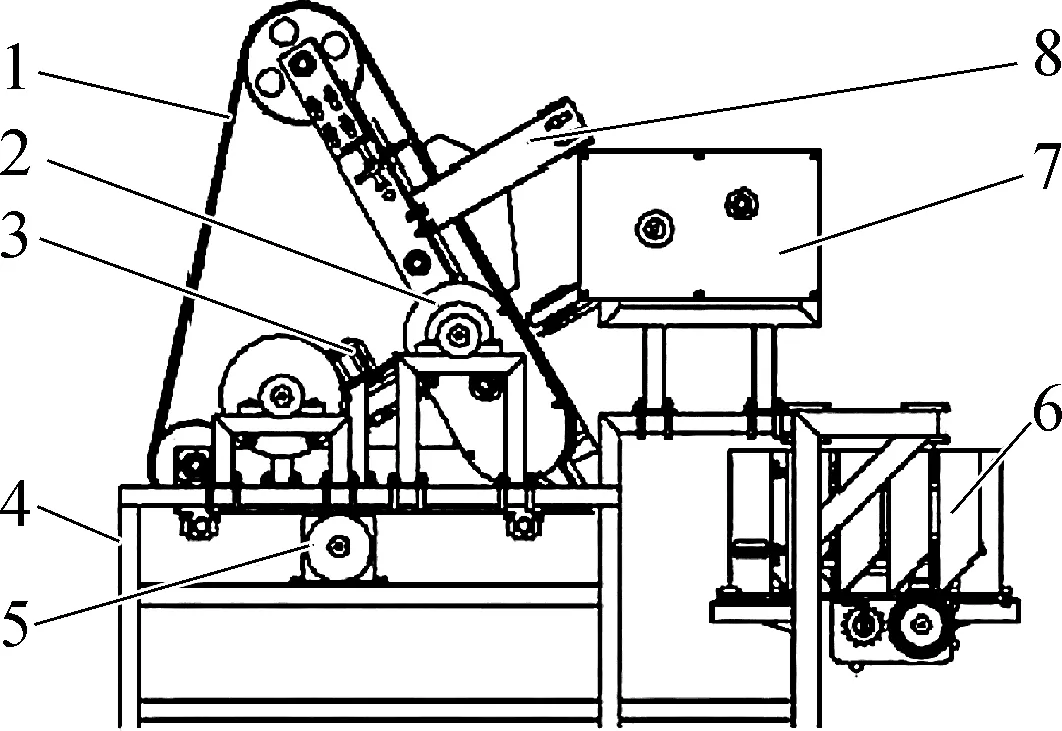
圖6 穴盤苗自動(dòng)輸送裝置結(jié)構(gòu)簡圖
1.5 移盤吹苗型取苗控制
控制苗盤一排一排進(jìn)給,缽苗到達(dá)取苗位置時(shí),氣吹式噴嘴向苗盤底部小孔噴射一定氣壓范圍內(nèi)的氣流實(shí)現(xiàn)將缽苗吹出或吹松式取苗,將這樣一種控制方式稱為移盤吹苗型。采用這種方式的都是整排或多個(gè)氣嘴同時(shí)吹苗,被吹出的缽苗一般會(huì)由傳送帶輸送到栽植機(jī)構(gòu),或者利用氣嘴吹松后采用夾持機(jī)構(gòu)夾取缽苗后送到栽植機(jī)構(gòu)。
移盤吹苗型一般會(huì)在吹苗前進(jìn)行打破缽苗與苗盤之間粘結(jié)力的作用后進(jìn)行吹苗成功率較高,采用這種方式可以簡化取苗過程,提高工作效率。也有將氣體吹苗不用于取苗作用,而用于缽苗吹松作用,吹松后的缽苗再配合夾持機(jī)構(gòu)完成取苗過程,缽苗吹松后有利于提高取苗手取苗的成功率。
例如高捷[31]設(shè)計(jì)的氣動(dòng)取苗系統(tǒng)(圖7),采用型號(hào)為LPC1114的微控制器,利用電磁鐵和復(fù)位彈簧,控制推桿式氣嘴撞擊苗盤底部破結(jié),后通過控制電磁閥控制噴嘴噴出射流氣體沖擊缽苗底部,將缽苗吹出穴盤,進(jìn)入缽苗輸送裝置,完成取苗控制。郭警偉等[32]設(shè)計(jì)的氣吹式落苗試驗(yàn)裝置,該裝置利用位移滑道使整排氣吹裝置進(jìn)給移動(dòng),每次移動(dòng)至每一排苗盤底部,使氣嘴對準(zhǔn)底部小孔,通過氣動(dòng)裝置氣嘴噴出氣流將穴盤中的缽苗吹出,缽苗在重力和空氣阻力的作用下落入排苗輸送帶,完成取苗。還有韓綠化等[33]設(shè)計(jì)的蔬菜穴盤育苗氣吹式缽體松脫裝置(圖8),該裝置采用TC5510型單軸運(yùn)動(dòng)控制器,采用磁性開關(guān)檢測氣缸氣桿的位置信息。工作時(shí),將整盤缽苗固定,控制系統(tǒng)驅(qū)動(dòng)直線模組,控制氣嘴排一排一排進(jìn)給到穴盤底部的穴孔排水口,后控制氣動(dòng)回路從氣嘴排里瞬間噴射高壓空氣,由此產(chǎn)生的氣流沖擊力頂吹缽苗,然后驅(qū)動(dòng)氣嘴排移動(dòng)至下一排缽苗底部,直到完成整盤缽苗吹松工作。
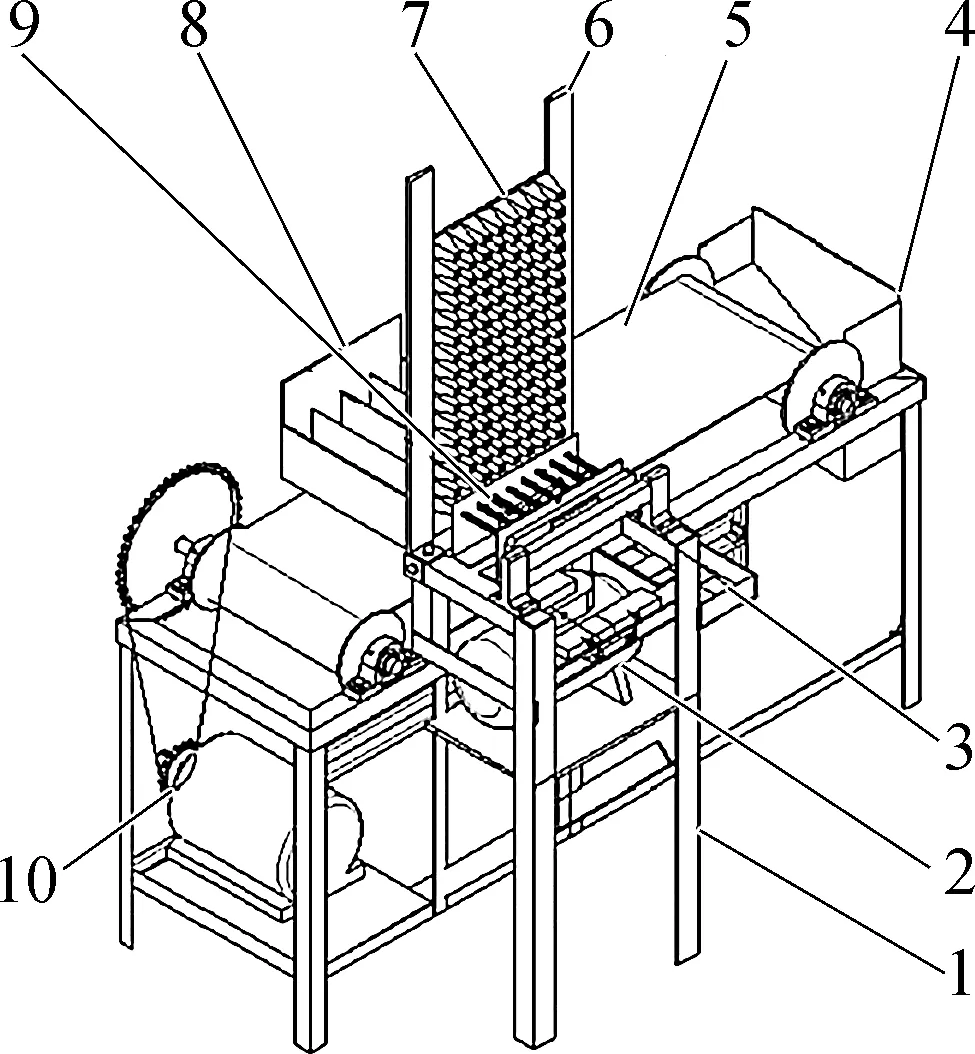
圖7 氣動(dòng)取苗系統(tǒng)結(jié)構(gòu)示意圖
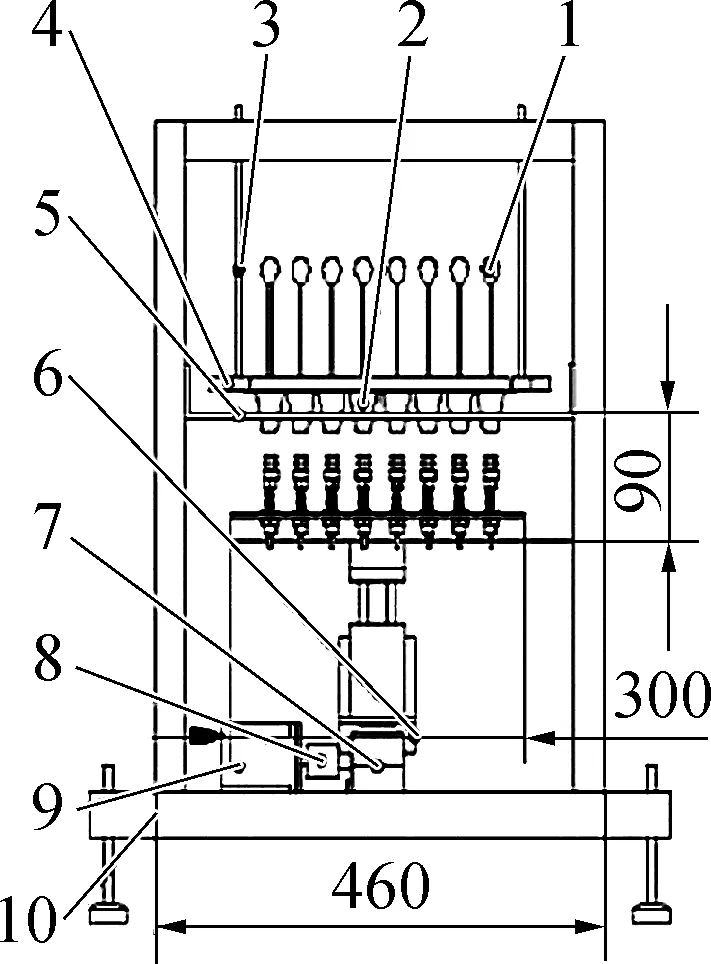
圖8 蔬菜穴盤育苗氣吹式缽體松脫裝置結(jié)構(gòu)簡圖
2 我國自動(dòng)取苗技術(shù)存在的問題
目前,我國在全自動(dòng)移栽機(jī)自動(dòng)取苗技術(shù)的研究尚在實(shí)驗(yàn)室階段,大部分相關(guān)樣機(jī)還是單株取苗為主,有關(guān)整排取苗的以試驗(yàn)臺(tái)架為主,市場上未見較為成熟的產(chǎn)品。
1) 取苗工作效率較低,傷苗率較高。大部分樣機(jī)采用單株取苗,這種方式的取苗速度限制整機(jī)的工作效率,使整機(jī)的工作效率較低。關(guān)于整排取苗的試驗(yàn)臺(tái)可以一定程度的提高移栽效率,但由于苗盤缽苗距離較近,對于取苗手的機(jī)構(gòu)、取苗成功率以及取苗后的分苗、投苗、植苗過程又提出了更高的要求。采用單株取苗的如馬曉曉等[34]進(jìn)行作業(yè)參數(shù)優(yōu)化的番茄缽苗移栽機(jī)自動(dòng)取苗裝置,其取苗頻率在57株/min左右,采用整排取苗的如王東洋等設(shè)計(jì)的自動(dòng)頂-夾式蔬菜穴盤苗取苗裝置,其取苗頻率可以達(dá)到140株/min左右。
關(guān)于取苗執(zhí)行機(jī)構(gòu),較多采用取苗手夾取式或取苗針扎取式取苗。取苗時(shí),由于取苗手需插入苗盤中夾取基質(zhì)對可能會(huì)傷及缽苗根部,整排取苗時(shí)由于缽苗距離較近,可能對缽苗的葉片及苗桿有所傷害。采取苗桿頂苗時(shí),如果不進(jìn)行破結(jié)過程,可能造成基質(zhì)被頂碎傷及苗根部或苗體。傷及缽苗造成缽苗成活率低,栽植后死亡,影響農(nóng)業(yè)生產(chǎn)。
2) 取苗成功率較低。單株取苗成功率相對較高,整排取苗過程中,由于多個(gè)取苗手或取苗針同時(shí)取苗,且取苗手之間距離較小,相互之間有所干擾,影響取苗成功率。采用單株取苗的如李華等[35]設(shè)計(jì)的辣椒穴盤苗自動(dòng)取苗機(jī)構(gòu),其取苗成功率高達(dá)98.6%。取苗時(shí),取苗手夾持力過小,缽苗脫落,夾持力過大,基質(zhì)夾碎,造成取苗失敗;整排取苗手定位不準(zhǔn)確,取苗時(shí)沒有到達(dá)取苗位置,造成取苗失敗。頂苗、吹苗前不進(jìn)行破結(jié)工作,可能造成缽苗吹不出苗盤,缽苗頂不出苗盤或者基質(zhì)被頂穿,造成取苗失敗。所以優(yōu)化取苗方式、提升系統(tǒng)的控制性能、提高定位精度,對于提高取苗成功率有著積極的作用。
3) 缽苗種類、苗盤規(guī)格繁多。移栽作物種類繁多,每種作物的移栽要求有所不同,苗盤的規(guī)格各異,對于移栽設(shè)備、取苗技術(shù)又提出不同的要求。目前移栽機(jī)種類繁多,取苗方式各異,移栽設(shè)備通用性較低,對于不同種類移栽機(jī)的研發(fā),投資較大,造成資源浪費(fèi)。
3 自動(dòng)取苗技術(shù)發(fā)展建議
3.1 高速取苗機(jī)構(gòu)的研發(fā)
國外的蔬菜全自動(dòng)移栽機(jī)自動(dòng)取苗技術(shù)較為成熟,意大利FUTURA型蔬菜移栽機(jī)的效率高達(dá)130株/min,國內(nèi)移栽機(jī)缽苗自動(dòng)取投的研究水平僅能接近單行70株/min,工作效率較低[20],因此提高我國自動(dòng)取苗技術(shù)的工作效率較為關(guān)鍵。參照目前國內(nèi)自動(dòng)取苗技術(shù)現(xiàn)狀,移栽速率的提高勢必會(huì)影響取苗質(zhì)量,出現(xiàn)漏苗傷苗等情況。
取苗控制方式上采用苗盤進(jìn)給的整排頂苗夾苗結(jié)合的取苗控制方式,采用這種方式可以簡化單一苗盤進(jìn)給和單一取苗手移動(dòng)的控制過程,整排取苗,簡化單株取苗的過程重復(fù),減少取苗時(shí)間,提高工作效率;整排頂夾結(jié)合的方式可以解決夾苗夾不出、傷苗等問題,提高工作效率,減小傷苗率。
3.2 一體化智能移栽裝備
利用智能控制算法提高取苗手、苗盤定位精度,增加夾持力監(jiān)控系統(tǒng),對取苗手夾持力實(shí)時(shí)控制,頂苗、吹苗取苗前進(jìn)行破結(jié)工作都可以在一定程度上提高取苗成功率。對于提高取苗成功率,國內(nèi)一些學(xué)者將控制算法、機(jī)器視覺、監(jiān)控系統(tǒng)等技術(shù)應(yīng)用于取苗手的定位、缽苗位置的定位等。如任玲等[36]針對整排穴盤苗取苗裝置,將模糊PID控制應(yīng)用在整排取苗機(jī)械手定位控制中,實(shí)現(xiàn)機(jī)械手的精確定位、提高取苗成功率。胡飛等[37]將機(jī)器視覺圖像處理應(yīng)用于缽苗的識(shí)別與定位,實(shí)現(xiàn)對缽苗位置的精度定位。王俊等[38]設(shè)計(jì)苗缽?qiáng)A持力檢測系統(tǒng),實(shí)時(shí)監(jiān)測取苗爪對苗缽?qiáng)A持力的變化情況,減少對苗缽的損傷、提高取苗成功率。
對于自動(dòng)移栽機(jī)在控制系統(tǒng)上存在著很多問題,如系統(tǒng)不穩(wěn)定,電氣化程度低,操作較為復(fù)雜等。對于全自動(dòng)移栽機(jī)控制系統(tǒng)的研發(fā),性能優(yōu)良的控制系統(tǒng)可以提高整機(jī)的工作效率。隨著人機(jī)界面控制、智能控制等技術(shù)的發(fā)展,全自動(dòng)移栽機(jī)的研發(fā)也將朝著智能化、可視化、便捷化的方向發(fā)展。如賀磊盈等[39]利用機(jī)器視覺獲取穴盤苗信息,將貪心遺傳算法應(yīng)用于規(guī)劃補(bǔ)栽路徑,減少補(bǔ)苗時(shí)間,提高移栽效率。如王寧等人將三菱人機(jī)界面應(yīng)用于移栽機(jī)控制系統(tǒng)中,簡化了操作過程,實(shí)現(xiàn)了移栽信息的實(shí)時(shí)顯示監(jiān)控。
3.3 多功能的通用型移栽機(jī)
在不同的國家,氣候、環(huán)境、蔬菜種植種類的不同,不同的作物移栽需要不同的移栽機(jī)械,不同的環(huán)境下對于移栽要求也是不一樣的,因此需要數(shù)量類型眾多的全自動(dòng)移栽機(jī)。對于整機(jī)控制系統(tǒng),每一種機(jī)型配套控制系統(tǒng)都不一樣,需要研發(fā)與某種機(jī)型配套的控制系統(tǒng)。由于移栽機(jī)種類各異,呈現(xiàn)出多系列、多品種的局面,所以提高移栽機(jī)的通用性,研發(fā)多功能聯(lián)合的通用型移栽機(jī)是非常必要的。
規(guī)范化育苗,采用統(tǒng)一規(guī)格的苗盤,集中統(tǒng)一育苗管理,可以節(jié)約種子、肥料、農(nóng)藥等,提高成苗率高,缽苗素質(zhì)好,易成活。規(guī)范化育苗便于良種推廣和規(guī)范管理,成苗便于遠(yuǎn)距離運(yùn)輸和機(jī)械化移栽等優(yōu)點(diǎn)。規(guī)范化研發(fā),提高制造標(biāo)準(zhǔn),注重移栽機(jī)標(biāo)準(zhǔn)件的研發(fā),注重多移栽種類,多環(huán)境下適用的一體化移栽機(jī)研發(fā)。規(guī)范化研發(fā)可以減少不必要的投資與資源浪費(fèi),對于綠色環(huán)保的可持續(xù)發(fā)展是十分重要的。
4 結(jié)論
1) 國外發(fā)達(dá)國家對移栽機(jī)的研發(fā)較早,歷經(jīng)長期的發(fā)展,自動(dòng)取苗技術(shù)較為成熟,自動(dòng)化程度較高,在農(nóng)業(yè)生產(chǎn)得到了廣泛的應(yīng)用。國內(nèi)對自動(dòng)取苗技術(shù)的研發(fā)與國外相比還有很大差距,研究尚處在初級(jí)階段,研究的相關(guān)裝置大部分處于實(shí)驗(yàn)室階段,并未投入生產(chǎn)中。
2) 對于自動(dòng)取苗技術(shù)的五種方式中,國外成型的全自動(dòng)移栽機(jī)較多采用移盤移手型和移盤頂苗結(jié)合的整排取苗手夾持型。相較兩種方式,移盤頂苗結(jié)合整排取苗手夾持型可以解決夾缽苗夾不出、傷苗等問題,提高取苗成功率,減少傷苗率。國內(nèi)較多采用移盤固手型取苗,通過取苗手翻轉(zhuǎn)式換位,實(shí)現(xiàn)取苗位與投苗位的轉(zhuǎn)換。
3) 隨著我國自動(dòng)取苗技術(shù)的發(fā)展,未來全自動(dòng)移栽裝備將以高速取苗機(jī)構(gòu)的研發(fā)為主要方向。實(shí)現(xiàn)智能化、可視化、便捷化控制的從取苗、送苗、分苗、到植苗整個(gè)栽植過程的多功能一體化全自動(dòng)移栽機(jī)。逐步規(guī)范農(nóng)機(jī)農(nóng)藝生產(chǎn)標(biāo)準(zhǔn),提高全自動(dòng)移栽機(jī)的通用性。
