基于VR 的無人車間橋式起重機路徑規劃研究
2021-02-22 12:54:42
起重運輸機械 2021年1期
關鍵詞:模型
1.大連理工大學機械工程學院 大連 116024 2.中冶節能環保有限責任公司 北京 100088
0 引言
橋式起重機(以下簡稱橋機)是一種在倉庫、車間、碼頭等場所應用廣泛的起重運輸機械。當前,對一些具有高度危險性和對人體產生健康威脅的如核廢料處理、金屬冶煉等工作場所[1],橋機無人化運行的重要性越來越凸顯。
科學合理的對橋機或其下吊載的運行路徑進行規劃是解決其操控無人化的重要問題。劉少有[2]等借助真機操作,實地探查理論的可行性,這種方法雖然能及時獲取反饋和調整原有理論,但卻造成了能源、成本和時間上的浪費,使得整體研究的效果不佳;更多的學者則是借助計算機技術,建立數據模型,用數據仿真作為研究橋機運行的媒介。在此方面,國內外學者做了大量的研究,魏云平[3]等在Matlab 仿真平臺對橋機的二維柵格地圖路徑拐點作等效距離處理,得到了改進遺傳算法后的最優路徑;杜文正[4]等將機器人路徑規劃技術引入到橋機負載運動的軌跡規劃中,將轉載場地的三維空間信息轉化為二維柵格地圖,利用遺傳算法進行了運動軌跡的優化仿真;Frank Taylor[5]等借助虛擬現實技術驗證了利用橋機進行重型機械虛擬裝配的有效性,確定了虛擬環境中橋機附加載荷后的模擬運動與實際橋機附加載荷后運動間存在相關性。國內外學者的研究主要集中在二維平面的仿真研究,在空間三維領域以及模擬顯示方面,橋機的運行規劃研究仍顯不足。
本文提出了基于Unity 3D 平臺的橋機智能運行仿真方法,在Unity 3D 中實現橋機的三維可視最優路徑運行模擬,本方法充分利用了Unity 3D 強大的圖形渲染功能、物理模擬功能和碰撞檢測功能等,通過對引擎功能進行優化和二次改進,實現了更強的仿真效果。
1 虛擬化車間環境與橋機模型數據構建
橋機三維模型的設計在SolidWorks 環境下完成,采用3D Max 軟件作為整機模型的轉化工具,保留了零件的原層級結構和空間位置排列且很好的兼容Unity 平臺,模型流程設計見圖1。同時,借助3D Max 軟件進行紋理設置和模型優化,在保留主要幾何信息的基礎上最大程度的減少多邊形的數量,經過優化后,模型大小縮減為原來的近1/4。
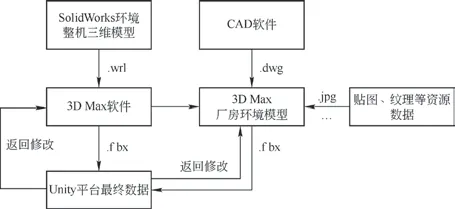
圖1 仿真模型設計流程圖
如圖2 所示,利用3D Max 軟件在建筑、室內設計領域的優勢建立虛擬廠房模型,整合CAD 圖紙和材質、貼圖、紋理等資源,形成與橋機匹配的場地模型,模型主要包括廠房、室內配套設備和作為障礙的物料件等。

圖2 虛擬廠房模型
為了將橋機模型中的零件有組織的加入數據庫并建立合理的層級結構,需要對整機模型進行重構。根據需要,將模型規劃為邏輯結構和空間結構,這兩種結構也是模型數據庫中應用最為廣泛的結構[6]。在邏輯結構中,共同完成某一功能的模型有組織地組合在一起,當控制信號到來時,模型同時響應,縮短信號傳遞路徑,減少傳遞時間,模型的功能被有機地聯系起來。在空間結構中,相鄰空間域的模型組合在一起,保證渲染時模型剔除的快速性和繪制紋理的連續性,縮短時間,提高計算效率。根據兩種結構特點,橋機整機模型的運動節點被設置為邏輯結構,相鄰非運動節點設置為空間結構[7],如圖3 所示。
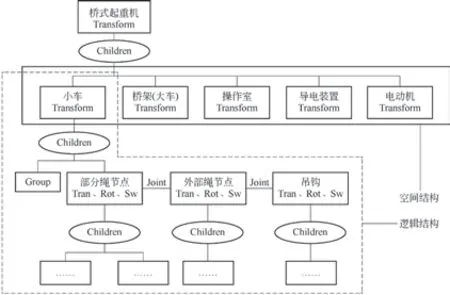
圖3 橋機模型層級結構圖
樣機內的運動模型通過Transform 節點建立父子聯系,以樣機小車運動為例,小車的位置建立在上一層級的內置坐標系下,即相對整機的Transform 節點為基準。鋼絲繩的運動特性在邏輯上隸屬于小車,但考慮到繩索視覺上的柔性本性,本文將部分繩索節點作為小車子物體,其他節點以世界坐標為基準,吊鉤同樣建立在世界坐標系下,且繩節點和吊鉤保持旋轉Rot 和搖擺Sw 特性,由此構成節點逐層嵌套結構,運動通過Transform節點傳遞下去[8]。如圖4 所示。
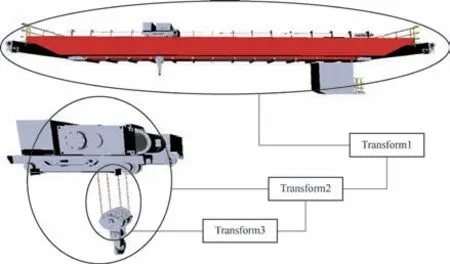
圖4 小車節點及其對應結構
2 空間路徑規劃運行實現
2.1 基于導航網格的A*尋路算法
尋路地圖可以看做是一組存儲地圖信息的數據結構,目前大多數A*算法都是基于具有對稱性的柵格地圖,如圖5 所示,這種地圖在小范圍環境內應用效果較好,在大型地圖,尤其是存在大面積均質化地形環境時,由于其尋路網格節點較多,占用系統資源過大,搜索效率下降[9]。
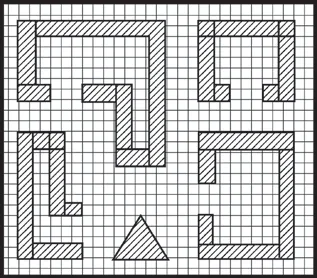
圖5 柵格地圖
導航網格地圖是一種用凸多邊形集合表示的地圖類型,如圖6 所示,凸多邊形保證軌跡均落在導航網格內部,不會經過其他單元,凸多邊形內的任一兩點連線均被認為是可行路徑,也是最短路徑[10,11]。采用這種網格時,減少了搜索節點,提高了搜索效率,無人化的橋機車間屬于非開放性大面積空間,采用導航網格尋路可以取得較好的效果。
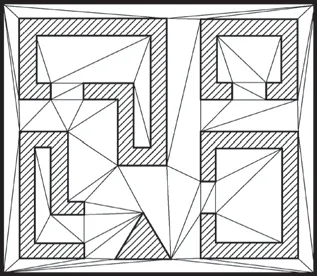
圖6 導航網格示意圖
基于導航網格的A*尋路過程如圖7 所示,與基于柵格地圖尋路算法相比,花費值g 和估計值h 的定義標準發生了改變,且最終路線獲取需要借助拐點法等路徑獲取算法取得。
如圖8 所示,粗箭頭為最終的路徑方向,路徑線進入三角形的邊稱為穿入邊,路徑線出去的邊稱為穿出邊,每個三角形的花費(g 值)采用穿入邊和穿出邊的中線距離,估計值(h 值)使用該三角形的中心點到目標點的距離[12,13]。

圖7 A*尋路算法示意圖
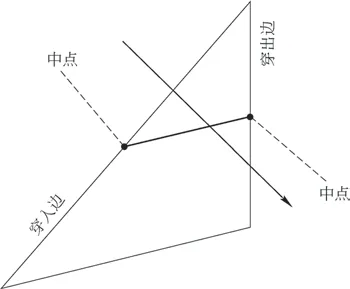
圖8 三角網格應用圖
算法經過前兩方面的步驟之后,形成的并不是最終的最優路徑點,而是一條從起點到終點的由相鄰三角形構成的聯通區域,圖9a 中粗線條是需要生成的導航線路,圖9b 中虛線是導航網格中的多邊形臨邊,稱為多邊形的穿出邊,導航線路需要通過路徑點生成算法找出,常用拐角點算法。
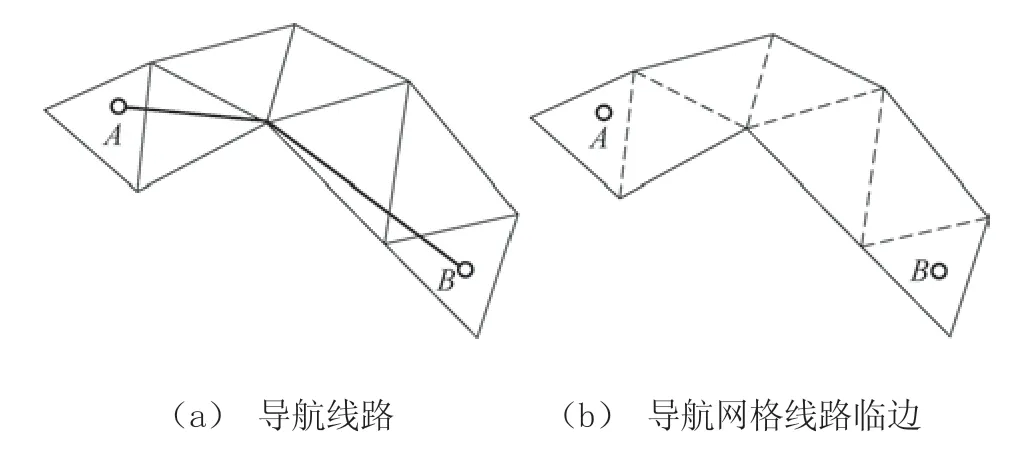
圖9 路徑點生成示意圖
首先找到起始點A 所在的多邊形和穿出邊的兩個端點,由起點連接兩個端點形成兩個線段左線和右線,如圖10a 所示。
繼續尋找下一穿出邊的兩個端點,判斷新的左點和右點是否在左線和右線形成的扇面區域,如果在,則根據新的左點和右點更新左線和右線,如圖10b 所示,當只有一個新點不在扇面區域時,則保留相應線段,只更新另一新點對應的線段。
繼續前一步驟,直到下一個穿出邊的兩個端點出現在左線左側或者右線右側,此時,當前左點(或右點)即為拐點,如圖10d 所示。
重復以上步驟,直到找出通向目標點的所有拐點為止。
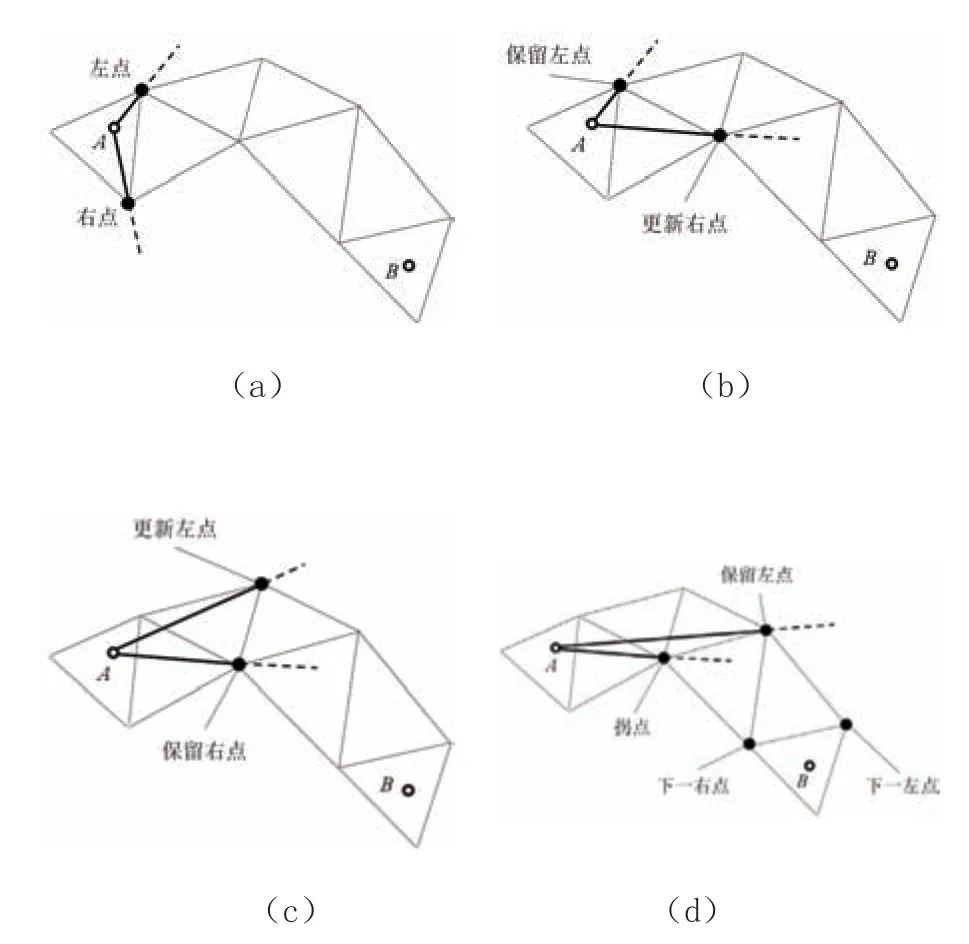
圖10 拐點計算示意圖
可以看出,基于導航網格的A*尋路算法產生的路徑,能直接穿越開放空間,遇到障礙物時具有拐點特性,即貼墻繞行,對比柵格地圖,更符合室內空間路徑運行的特點,更具合理性。
Unity 3D 自帶的導航網格尋路系統,能夠設置障礙區和通行區等地形屬性,并借助尋路主體(NavMesh Agent)實現尋路,但這種網格地圖屬于靜態網格,存在最大的兩個問題,一是地圖必須依靠實體模型,無法獨立的在空間移動,二是無法動態更新地圖環境內存在的障礙物信息,為了實現橋機在空間的路徑規劃仿真,借助Nav Mesh Components 組件解決這兩個問題,該組件將導航網格的生成作為一個腳本文件獨立出來,在空物體上掛載該腳本,并在初始地形層生成一定規格的導航網格后便可自由移動,而且能動態更新地圖所轄的障礙物信息,保障了橋機在空間運行時對路徑信息的獲取。
2.2 橋機空間運行最優路徑的實現
橋機帶載運動時具有空間特性,起升和水平運動是其工作狀態,且往往這兩種狀態是獨立的,因為在依靠鋼絲繩作為起升吊具時,起升運動和水平運動的疊加會導致吊物的搖擺[14],增加額外的力矩,尋路精度也會下降,故本文對橋機的空間運行作如下的處理:1)起升運動和水平運動為串聯動作;2)大、小車保持協同運動。
有了以上兩條考慮,橋機的空間運行,也即吊物的運動,將在空間的每一層級展開,利用Nav Mesh Components 組件,可以獲取任一層空間的最優路徑信息。考慮到吊物及吊具等跟隨大、小車運動,如何保證吊物與最優路線的匹配是運動完成的關鍵,Nav Mesh Agent 是掛載了尋路代碼的執行體,稱之為尋路主體,它依附于網格,且具有位置、速度、加速度和停止距離等控制參數。合理地協同尋路主體與大、小車的運動,可以很好的利用尋路主體的參數實現橋機的運行控制,本文通過添加代碼,將尋路主體的運動分解為大、小車的X、Y 雙向運動,并保持小車與尋路主體在水平投影的位置同步。大車部分代碼如下:

3 仿真與驗證
為了驗證橋機空間軌跡優化運行的可行性,參照GB/T 14405—2011《通用橋式起重機》賦予橋機相應運行數據,見表1。在仿真車間環境中,給定起始點和終點條件,研究在不同高度處運行時橋機的模擬效果。

表1 橋機運行基本參數表
依據標準,對于無空中人行通道的廠房,橋機的額定起重量小于50 t時,廠房跨度與橋機跨度差值取1.5 m,故該橋機運行的廠房通道尺寸為100 m×24 m。
圖11 為在不同高度處的橋機仿真運行效果圖,圖11a 和圖11c 為橋機在1.2 m 高度處繞障礙運行效果,圖11b 和圖11d 為橋機在4.5 m 高度處繞障礙運行效果。根據橋式起重機的運行基本參數,本文設置的大、小車協同速度為60 m/min,起升速度為20 m/min,加速度統一為0.5 m/s2,得到仿真時間如表2 所示,其中,平面運行模式消耗時間是指在不同高度處繞障礙所用時間,是結合地形環境和軌跡規劃算法給出的時間比較,全流程運行模式則是起重機從復位點開始將被吊物體放置目的地所用總時間,反映了總體效率的比較。
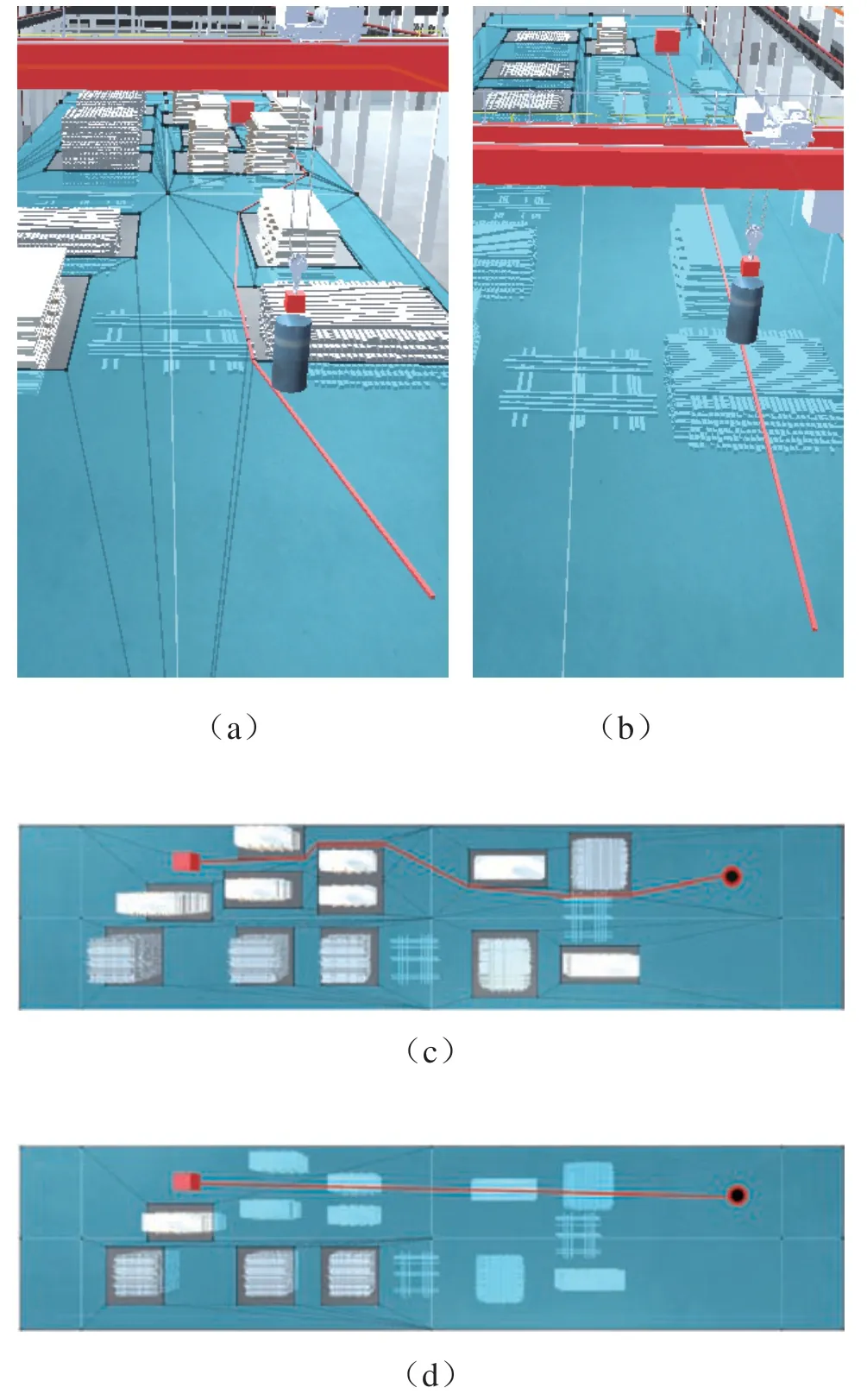
圖11 橋機仿真運行效果圖
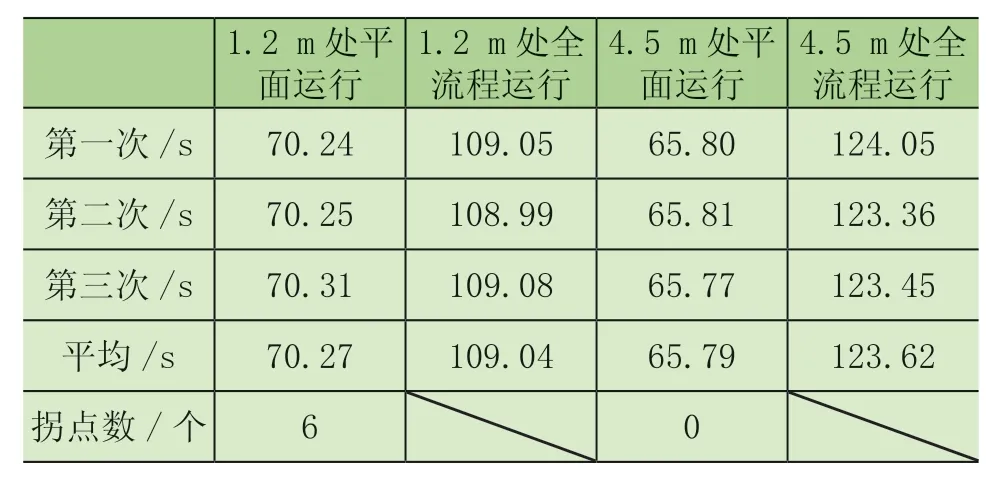
表2 橋機運行仿真時間
4 結論
本文以橋機為研究對象,搭建車間環境,利用Unity 3D 虛擬現實工具,實現了橋機的空間軌跡仿真運行。聯系實際和模擬結果,可以得出如下結論:若只考慮繞障礙用時,橋機運行時間主要受車間障礙物的分布影響,在復雜環境內的用時與頂層直接跨越用時差距不大,這反映了路徑規劃算法產生的效用,不過,拐點較多仍是實際運行需考慮的問題;而全流程運行模式下用時差距較大,主要是因為高度差的存在和垂直起升的模式帶來的時間消耗。在無人車間內橋機運行時,應對復雜環境時,應盡量發揮規劃算法的作用,增大規劃路徑運行時間占工作用時的比重,避免無用高度的產生。
可以看出,通過加入智能化路徑運行,廠房內部空間可以得到極大利用,同時,借助VR 的沉浸式和交互性環境,可以事先規劃出方案,作為無人化車間設計的有效補充,為實際無人化車間和橋機的智能運行的應用及研究提供平臺。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
核科學與工程(2015年4期)2015-09-26 11:59:03
中學數學雜志(初中版)(2006年1期)2006-12-29 00:00:00
