多功能AGV在汽車(chē)物料運(yùn)輸系統(tǒng)的應(yīng)用
2021-02-20 23:09:15于洪
內(nèi)燃機(jī)與配件 2021年2期
于洪



摘要:在汽車(chē)制造過(guò)程中,各車(chē)間之間的物料運(yùn)轉(zhuǎn)量龐大,為提高輸送效率,降低輸送成本,多采用AGV小車(chē)進(jìn)行物料輸送。在AGV輸送系統(tǒng)設(shè)計(jì)過(guò)程中,則需要搭配多類(lèi)別AGV小車(chē)進(jìn)行配合使用,但AGV小車(chē)功能出廠后就已經(jīng)確定,在生產(chǎn)過(guò)程中無(wú)法再改變,如果在工廠建設(shè)完畢并投產(chǎn)之后發(fā)現(xiàn)輸送系統(tǒng)設(shè)計(jì)問(wèn)題,則需要重新購(gòu)買(mǎi)所需類(lèi)型的AGV小車(chē),浪費(fèi)大量時(shí)間和財(cái)力。本文主要研究一種多功能AGV小車(chē)在汽車(chē)物料運(yùn)輸系統(tǒng)的應(yīng)用,該小車(chē)能夠隨意更換不同的應(yīng)用模塊來(lái)改變AGV的功能,適用范圍更廣。
關(guān)鍵詞:汽車(chē)物料;AGV輸送系統(tǒng);多功能;應(yīng)用模塊
中圖分類(lèi)號(hào):TP273? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?文獻(xiàn)標(biāo)識(shí)碼:A? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? 文章編號(hào):1674-957X(2021)02-0208-03
0? 引言
汽車(chē)制造過(guò)程中,各個(gè)車(chē)間的零部件運(yùn)輸量龐大,主要表現(xiàn)為原材料生產(chǎn)后,需要經(jīng)過(guò)下料、發(fā)料,然后運(yùn)送到指定的下一加工地點(diǎn)加工或存儲(chǔ)。在物料輸送過(guò)程中,需要物流設(shè)計(jì)科學(xué)合理,在輸送時(shí),盡量做到按照同一輸送方向進(jìn)行輸送,從而避免物流運(yùn)輸過(guò)程中,產(chǎn)生交叉,出現(xiàn)輸送事故,進(jìn)而提高輸送效率,降低輸送成本。因此在設(shè)計(jì)物料輸送路線時(shí),在設(shè)計(jì)開(kāi)始時(shí)就要反復(fù)驗(yàn)證,如果在工廠建設(shè)完畢并投產(chǎn)之后發(fā)現(xiàn)路線設(shè)計(jì)問(wèn)題,這時(shí)如果要再改變輸送線路布置方案,則需要浪費(fèi)大量時(shí)間和財(cái)力。現(xiàn)階段,大量工廠采用車(chē)間運(yùn)輸系統(tǒng)進(jìn)行物流運(yùn)輸產(chǎn)線布置,采用AGV運(yùn)輸小車(chē)作為主要運(yùn)輸載體。
傳統(tǒng)的AGV功能比較單一,往往汽車(chē)物料輸送系統(tǒng)中,需要多種類(lèi)AGV設(shè)備相互配合,從而組建起完整的物料輸送線路。因此在傳統(tǒng)汽車(chē)物料輸送產(chǎn)線智能化改造過(guò)程中,需要一次性購(gòu)入多種類(lèi)AGV小車(chē)進(jìn)行匹配,該種AGV小車(chē)功能出廠后就已經(jīng)確定,在生產(chǎn)過(guò)程中無(wú)法再改變。隨著多元化生產(chǎn)的需求,需要更多功能的AGV來(lái)匹配。在這種情況下,圍繞著能夠搭載多種應(yīng)用模塊,具有多功能的AGV小車(chē)進(jìn)行設(shè)計(jì),滿(mǎn)足小車(chē)能夠根據(jù)實(shí)際應(yīng)用場(chǎng)景更換不同的應(yīng)用模塊,從而改變AGV的功能,最終將多功能AGV小車(chē)應(yīng)用在汽車(chē)物料運(yùn)輸系統(tǒng)上,提高AGV適用范圍。
1? 整體設(shè)計(jì)方案
圍繞能夠搭載多種可替換的應(yīng)用模塊這一主要功能進(jìn)行設(shè)計(jì),如圖1所示,該多功能AGV包括底盤(pán)和若干能與底盤(pán)搭配的應(yīng)用模塊,底盤(pán)包括底盤(pán)外殼、行走機(jī)構(gòu)和底盤(pán)外殼的頂面形成承接平臺(tái)。應(yīng)用模塊舉升模塊、翻蓋模塊、傳輸模塊等,相對(duì)應(yīng)的AGV類(lèi)型為:舉升AGV、傳輸AGV和翻蓋AGV等。AGV底盤(pán)和應(yīng)用模塊,通過(guò)螺栓柱與螺母的配合以及公母插頭對(duì)接,完成不同應(yīng)用模塊的搭載,進(jìn)而實(shí)現(xiàn)應(yīng)用模塊相對(duì)應(yīng)的功能。
2? 底盤(pán)的結(jié)構(gòu)及功能
如圖2所示,底盤(pán)包括底盤(pán)外殼、行走機(jī)構(gòu)、無(wú)線通訊系統(tǒng)和供電系統(tǒng)等。底盤(pán)的主要作用是與外部通訊,攜帶應(yīng)用模塊行走,向應(yīng)用模塊供電和控制應(yīng)用模塊的動(dòng)作。底盤(pán)外殼的頂面形成承接平臺(tái),承接平臺(tái)用于支撐應(yīng)用模塊,承接平臺(tái)的頂面上設(shè)有與應(yīng)用模塊電性連接的公插頭,承接平臺(tái)頂面的四個(gè)邊角分別設(shè)有與應(yīng)用模塊機(jī)械連接的螺栓柱。
3? 應(yīng)用模塊
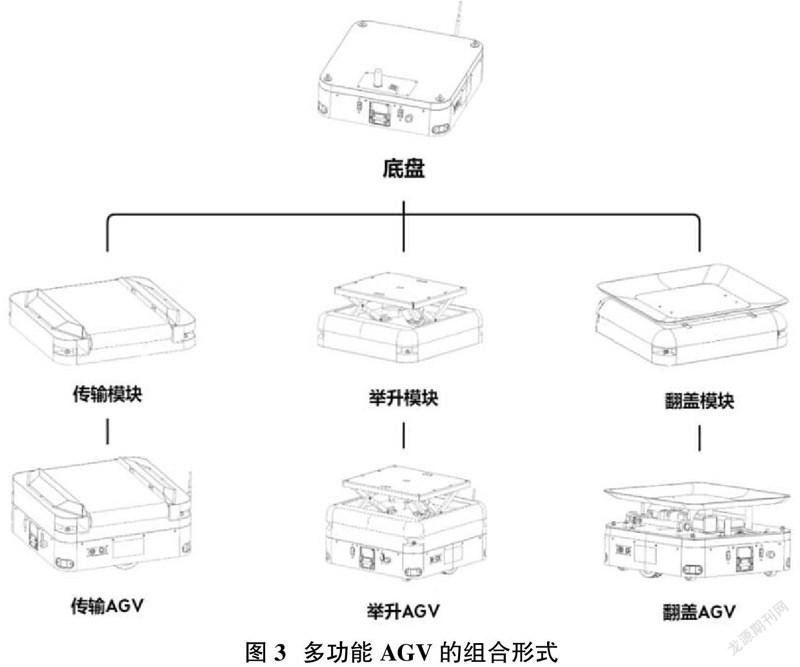
多功能AGV底盤(pán)通過(guò)與不同功能的應(yīng)用模塊搭配可實(shí)現(xiàn)不同功能的AGV,如舉升AGV、傳輸AGV和翻蓋AGV等;通過(guò)螺栓柱與螺母的配合可實(shí)現(xiàn)底盤(pán)與應(yīng)用模塊的機(jī)械連接。
如圖3所示,應(yīng)用模塊包括舉升模塊、翻蓋模塊和傳輸模塊。
傳輸模塊與底盤(pán)配合形成傳輸AGV。傳輸模塊包括傳輸機(jī)構(gòu),傳輸機(jī)構(gòu)包括主動(dòng)輥、被動(dòng)輥、傳輸帶和驅(qū)動(dòng)主動(dòng)輥的電機(jī);
舉升模塊與底盤(pán)配合形成舉升AGV。舉升模塊包含舉升機(jī)構(gòu),舉升機(jī)構(gòu)包括剪式升降座以及驅(qū)動(dòng)剪式升降座的舉升氣缸;
翻蓋模塊與底盤(pán)配合形成翻蓋AGV。如圖4所示,翻蓋模塊包含翻蓋和用于驅(qū)動(dòng)翻蓋翻轉(zhuǎn)的翻轉(zhuǎn)機(jī)構(gòu),翻轉(zhuǎn)機(jī)構(gòu)包括翻轉(zhuǎn)桿、連桿機(jī)構(gòu)和翻轉(zhuǎn)電機(jī);翻轉(zhuǎn)電機(jī)通過(guò)連桿機(jī)構(gòu)帶動(dòng)翻轉(zhuǎn)桿旋轉(zhuǎn)。翻蓋通過(guò)L型桿與翻轉(zhuǎn)桿連接。
4? AGV汽車(chē)物料輸送工作流程
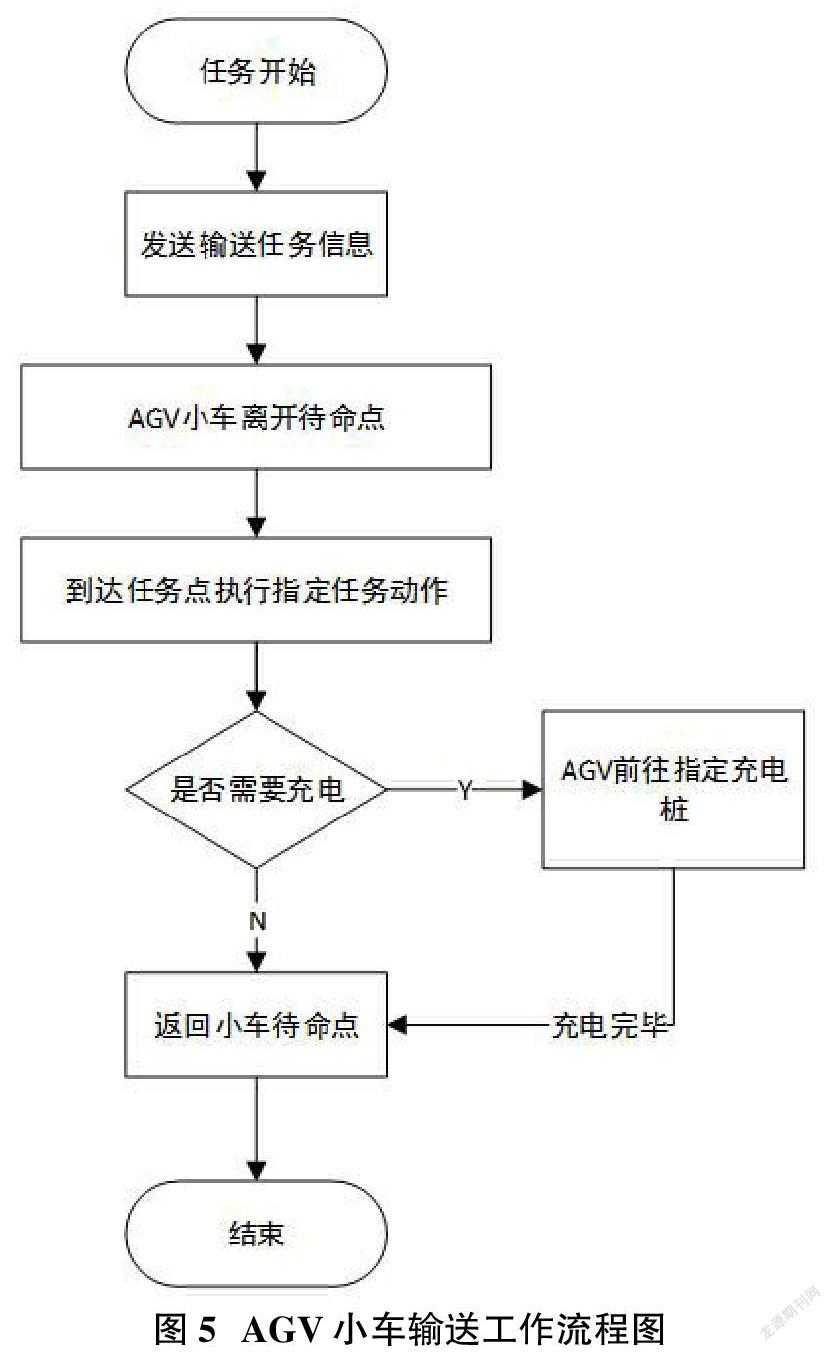
AGV系統(tǒng)發(fā)布任務(wù)信息,AGV小車(chē)接收任務(wù)并開(kāi)始執(zhí)行任務(wù)。當(dāng)AGV小車(chē)通過(guò)掃描工位二維碼,獲取汽車(chē)物料配送的位置信息,從而生成配送任務(wù)。AGV到達(dá)任務(wù)地點(diǎn)后放置汽車(chē)物料,系統(tǒng)根據(jù)AGV小車(chē)反饋電量信息,確認(rèn)是否需要充電,如需要充電則前往指定充電樁進(jìn)行充電,否則返回任務(wù)待命地點(diǎn)。具體物料輸送工作流程如圖5所示。
5? 汽車(chē)生產(chǎn)車(chē)間物料輸送系統(tǒng)的布局設(shè)計(jì)
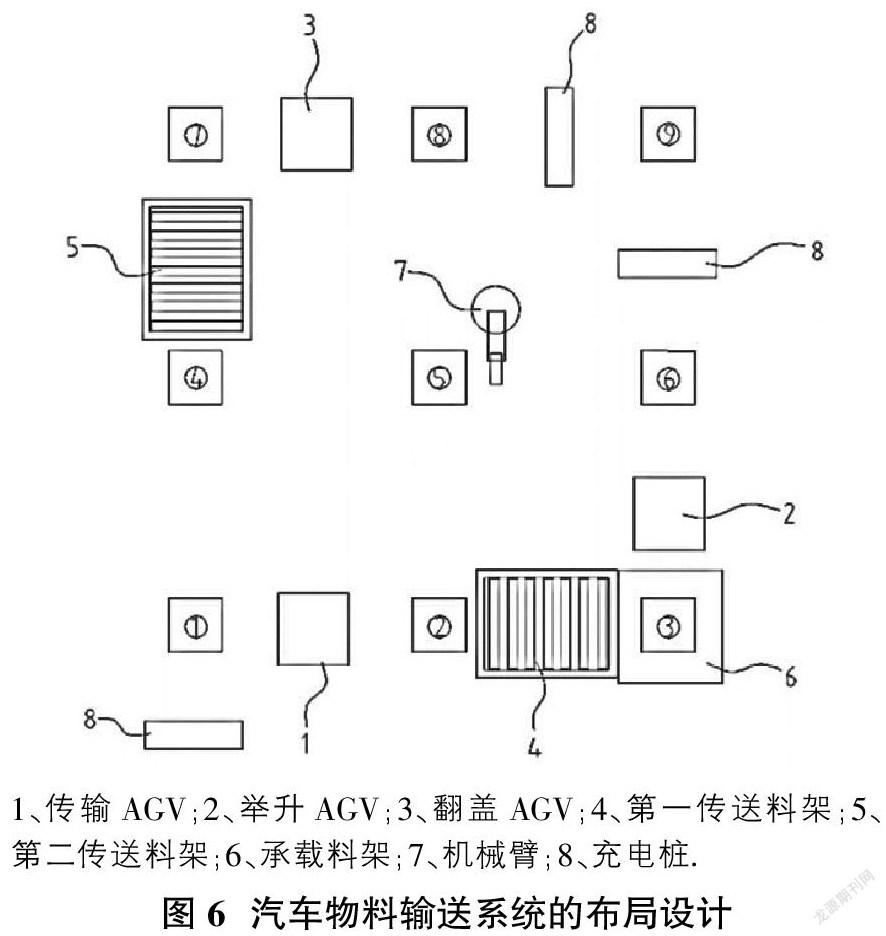
汽車(chē)行業(yè)汽車(chē)物料在輸送時(shí),應(yīng)盡量做到按照同一輸送方向進(jìn)行輸送,從而避免物流運(yùn)輸過(guò)程中,產(chǎn)生交叉,出現(xiàn)輸送事故。針對(duì)上述要求,進(jìn)行汽車(chē)物料輸送系統(tǒng)作業(yè)流程設(shè)計(jì)。如圖6所示,在汽車(chē)物料輸送系統(tǒng)中,設(shè)置呈九宮格分布的1~9號(hào)工位、傳輸AGV、翻蓋AGV、舉升AGV、機(jī)械臂、第一傳送料架、第二傳送料架和承載料架。傳輸AGV行走在1號(hào)工位與2號(hào)工位之間,第一傳送料架位于2號(hào)工位與3號(hào)工位之間,承載料架位于3號(hào)工位的上方,舉升AGV行走在3號(hào)工位與6號(hào)工位之間,翻蓋AGV行走在7號(hào)工位與8號(hào)工位之間,第二傳送料架位于4號(hào)工位與7號(hào)工位之間。傳輸AGV、翻蓋AGV、舉升AGV與機(jī)械臂、第一傳送料架、第二傳送料架和承載料架相互協(xié)調(diào)配合,形成汽車(chē)物料輸送系統(tǒng)。
同時(shí),1~9號(hào)工位處均設(shè)有二維碼,傳輸AGV、翻蓋AGV和舉升AGV的底部均設(shè)有用于識(shí)別二維碼的掃描器,AGV通過(guò)二維碼進(jìn)行定位。在二維碼中,已經(jīng)存儲(chǔ)了制造過(guò)程中AGV移動(dòng)的軌跡及相應(yīng)的位置信息,AGV掃描了工位處所設(shè)置的二維碼,就能夠識(shí)別小車(chē)在輸送過(guò)程中的位置信息,幫助AGV小車(chē)的輔助定位和軌跡移動(dòng),從而提高汽車(chē)物料輸送的效率。由于小車(chē)在移動(dòng)過(guò)程中通過(guò)掃描工位的二維碼,獲取軌跡信息及位置信息之后,能夠幫助AGV小車(chē)在移動(dòng)過(guò)程中進(jìn)行路徑規(guī)劃以及防碰撞,進(jìn)一步提高AGV小車(chē)的定位精度,實(shí)現(xiàn)多輛AGV小車(chē)的協(xié)同工作,提高貨物輸送的效率。
1號(hào)工位、6號(hào)工位和8號(hào)工位的旁邊設(shè)有充電樁,三個(gè)充電樁分別給三個(gè)AGV充電。
6? 汽車(chē)物料輸送系統(tǒng)的工作流程
傳輸AGV、舉升AGV、翻轉(zhuǎn)AGV在汽車(chē)物料輸送系統(tǒng)中,主要承擔(dān)了物料輸送作用,通過(guò)對(duì)三種AGV進(jìn)行物料輸送動(dòng)作的設(shè)計(jì)與匹配,從而實(shí)現(xiàn)高效的輸送流程。具體工作流程如下:
傳輸AGV移動(dòng)到2號(hào)工位并與第一傳送料架的輸送端對(duì)接,傳送物料到第一傳送料架上后,傳輸AGV回到1號(hào)工位待機(jī)及充電;第一傳送料架將物料輸送至3號(hào)工位的承載料架上;處于6號(hào)工位待機(jī)的舉升AGV移動(dòng)至3號(hào)工位,舉升托起承載料架和物料,然后移動(dòng)到6號(hào)工位,再移動(dòng)到5號(hào)工位;機(jī)械臂將物料抓起,舉升AGV原路返回到3號(hào)工位并放下承載料架,之后返回到6號(hào)工位待機(jī);處于8號(hào)工位待機(jī)的翻蓋AGV移動(dòng)到5號(hào)工位,機(jī)械臂將物料放在翻蓋AGV的翻蓋上,翻蓋AGV移動(dòng)到8號(hào)工位,再移動(dòng)到7號(hào)工位,然后將物料轉(zhuǎn)運(yùn)到第二傳送料架上,然后回到8號(hào)工位待機(jī);傳輸AGV從待機(jī)的1號(hào)工位移動(dòng)到4號(hào)工位并與第二傳送料架對(duì)接,承接物料后移動(dòng)到1號(hào)工位,再移動(dòng)到2號(hào)工位,完成循環(huán)。
7? 結(jié)論
在汽車(chē)物料輸送系統(tǒng)設(shè)計(jì)過(guò)程中,采用多功能AGV小車(chē),小車(chē)底盤(pán)通過(guò)與不同功能的應(yīng)用模塊搭配可實(shí)現(xiàn)不同功能的AGV,如舉升AGV、傳輸AGV和翻蓋AGV等,能滿(mǎn)足多元化生產(chǎn)的需求。且小車(chē)能夠隨意更換不同的應(yīng)用模塊來(lái)改變AGV的功能,在汽車(chē)物料輸送車(chē)間智能化改造過(guò)程中,能夠大幅度降低改造投入,并且可以根據(jù)實(shí)際生產(chǎn)需求對(duì)AGV功能進(jìn)行變更,適用范圍更廣,滿(mǎn)足更多使用場(chǎng)景。
參考文獻(xiàn):
[1]趙恬.AGV在倉(cāng)儲(chǔ)作業(yè)中的應(yīng)用[J].計(jì)算機(jī)產(chǎn)品與流通,2020(01):103-104.
[2]吳琦.工業(yè)物聯(lián)網(wǎng)下的AGV智能小車(chē)應(yīng)用研究[J].智能制造,2020(10):56-59.
[3]AGV小車(chē)在汽車(chē)行業(yè)自動(dòng)化生產(chǎn)線上的應(yīng)用[J].汽車(chē)工藝師,2020(07):16-18.
[4]周鵬飛,潘志友,魏磊.AGV調(diào)度控制系統(tǒng)在汽車(chē)總裝車(chē)間的應(yīng)用[J].物流技術(shù),2020,39(09):129-133.