永磁同步電機無傳感器矢量控制技術研究
2021-02-18 10:06:00姜如霞
通信電源技術 2021年16期
王 金,姜如霞
(江西交通職業技術學院,江西 南昌 330013)
0 引 言
相對于普通交流變頻電機,永磁同步電機(Permanent Magnet Synchronous Motor,PMSM)具有效率高、能量密度高、轉矩慣量比大的特點以及環保低碳的優勢[1]。同時,永磁同步電機克服了繞線同步電機需要勵磁繞組、換向器、滑環而帶來的限制,具有良好的低速性能。但是,相比于異步電機,PMSM在控制時存在失步問題,因此需要通過轉子位置檢測或速度檢測裝置來獲得準確的轉子位置。當不存在轉子速度傳感器時,則需要通過其他容易測得的電機非轉速信號,如電機參數、定子電壓以及定子電流等來獲得電機的當前轉速或轉子位置,構成無速度傳感器的PMSM控制器[2,3]。
1 基于滑模觀測器的矢量控制方法
滑模觀測器通過不連續的控制變換系統結構,迫使系統狀態沿著特定路徑滑向平衡點,趨于穩定[4]。滑模控制器的原理由下式給出,通過bang-bang控制輸出量z控制電流誤差趨于0,則電壓估計量e~s趨近于真實感應電壓es,通過對es的相位判斷即可確定轉子磁鏈位置[5,6]。基于滑模觀測器的轉子磁鏈觀測算法表達式為:

式中,is為定子電流;為電流估計量;為電壓估計量;vs*為電機轉速;z為滑模控制器控制的輸出量,A為,B為。
式(1)和式(2)的離散形式為:

其中矩陣F和G的表達式為:


式中,I2表示2×2的單位矩陣。
轉子磁鏈位置檢測算法。轉子定位表示PMSM轉子靜止狀態下的轉子磁鏈初始位置檢測算法。
其基本原理是根據內置式PMSM的凸極效應造成PMSM轉子位置不同時定子電感不同,通過檢測電感的不同來確定轉子磁鏈初始位置[7,8]。內置式PMSM具有凸極效應,即Lq>Ld,其中Lq為交軸電感,Ld為直軸電感,記均值電感L=(Lq+Ld)/2,差值電感ΔL=(Lq-Ld)/2,則定子磁鏈方程可表示為:

式中,θe為解耦角度;ψf為永磁體的磁鏈;isα和isβ為電子電流分量;ψsα和ψsb為磁鏈分量。
當具有凸極效應的電機注入高頻旋轉電壓矢量時,其定子電流表達式為:

定子電流經過的坐標變換為:



式(10)中求取反正切即可得到2θe的值。
當定子磁場方向與轉子磁場方向相同,磁場增加,鐵芯飽和程度加強,電感減小,反之磁場減弱,鐵芯飽和程度減弱,電感加強[9,10]。通過施加與轉子磁場同向和反向的定子磁場,比較定子電流上升率即可判斷兩次施加方法的電感大小,進而判斷出轉子磁鏈的N、S極。
2 試驗與分析
2.1 系統仿真
為驗證本文設計的矢量控制技術對系統的控制效果,在MATLAB/Simulink平臺系統搭建仿真模型如圖1所示,其中包括轉速、位置估算的滑模觀測器模塊、電流環、轉速環控制器、Clark-Park變換及其逆變換模塊、SVPWM模塊和逆變模塊。

圖1 基于滑模觀測器的矢量控制
關于電機估算速度、a、b、c三相電流的仿真結果如圖2所示。

圖2 仿真結果
2.2 硬件試驗設計
本文基于DSP硬件資源搭建了永磁同步電機及無傳感器矢量控制硬件系統,對所提出的控制方法進行了實驗驗證。
PMSM控制系統分為主電路、驅動電路(驅動板)和控制電路(控制板)3個部分。其中驅動板主要包括輔助電源模塊、電壓電流溫度采樣模塊以及IGBT的PMW驅動電路,輔助電源模塊提供控制板工作所需的5 V、+15 V、-15 V電源以及隔離24 V電源。控制板主要包括電源模塊、DSP最小系統、EEPROM電路、數字輸出電路、繼電器輸出電路、硬件過流檢測電路、故障鎖存及解鎖電路、PWM使能控制電路、模擬輸入信號調理電路、模擬信號輸出處理電路與通信電路等部分。
該控制系統速度檢測采用正交編碼器,控制板上設計正交編碼器信號處理電路,正交編碼器供電電源選為10 V,輸出信號電平也是10 V。編碼器輸出信號通過施密特反相器HEF50106BT進行信號整形,故HEF50106BT供電電壓選用10 V。由于HEF50106BT輸出信號通過高速光耦HCPL-0601進行電平轉換,因此輸出電平為3.3 V,與DSP數字電平匹配。
2.3 結果分析
本文對設計的控制系統在電機拖動實驗平臺上進行了實驗研究,實驗結果如圖3所示,分別為電機轉速達到480 r/min時的電壓波形和轉子位置波形。
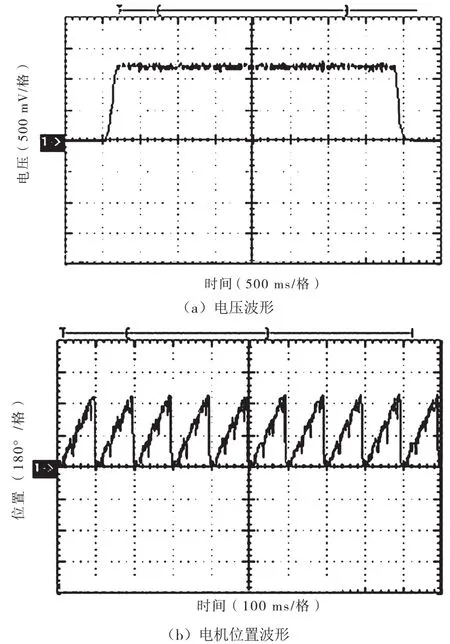
圖3 實驗結果
3 結 論
本文提出了一種基于滑模觀測器的無傳感器矢量控制技術,設計了一種轉子磁鏈位置估算檢測算法,在MATLAB/Simulink中構建了仿真模型,搭建了永磁同步電機無傳感器矢量控制的硬件平臺,并在電機拖動的負載實驗平臺進行實驗,通過實驗驗證轉子位置檢測算法響應速度較快、穩定性好,系統有效實現了永磁同步電機的無傳感器控制。
