基于機器視覺的固體發動機擺動噴管空間位姿的實時測量技術*
2021-02-16 11:54:24林新東鐘織富畢浩然梅天燦仲思東
固體火箭技術 2021年6期
關鍵詞:測量
林新東,冉 沖,鐘織富,孟 浩,畢浩然,梅天燦,仲思東,2
(1.武漢大學 電子信息學院,武漢 430079;2.測繪遙感信息工程國家重點實驗室,武漢 430079;3.湖北三江航天江北機械工程有限公司,孝感 432000)
0 引言
固體發動機擺動噴管的空間位姿測量是測試矢量發動機性能的重要步驟之一,為發動機的研究和設計提供了可靠的數據,對火箭飛行姿態和發動機推力矢量的控制具有重要意義[1-2]。目前,國內外對固體發動機擺動噴管運動參數測量的研究較少,且現有的擺動噴管空間位姿測量技術由于缺乏針對性的專用設備,實際操作起來較為困難,無法滿足噴管的實際測量要求[3]。
SEELY等[4]介紹了一種噴管擺角激光測量系統,該測量方案使用了激光二極管和位移敏感探測器,但是并未給出具體的擺角測量方法。針對固體火箭噴管的擺心偏移等問題,DONAT[5]進行了深入的研究。文獻[6]對噴管擺角測量的不確定度進行了分析,指出擺角標定精度對測量精度影響最大。后續馬新宇等[7]提出了一種集高精度零位桿、位移傳感器、采集器等一體的噴管擺角測量方案,該方案雖然能夠通過電腦操縱即可完成測量,但是依舊存在接觸式測量效率低、測量精度受測量頭精度影響、測量一致性差等缺點。文獻[8]提出了一套基于雙目視覺的火箭噴管運動姿態測量系統,根據基于雙截面的噴管擺心測量方法和基于投影的噴管擺角測量方法來確定擺心和擺角。此方案繁瑣之處在于每次測量之前都需要調整雙目相機系統的位置并完成標定,而且不能同步數據采集。文獻[9]提出的紅外光電探測方案通過紅外LED發光板和裝有紅外濾光片的高速相機來完成噴管表面大量目標物三維坐標的測定,通過圓錐曲面擬合得到噴管軸線,以大量瞬時轉軸擬合得到擺動軸,將噴管軸線和擺動軸的公垂線與軸線的交點作為擺心,并且實現了同步數據采集。
基于機器視覺的測量方案越來越多地應用于發動機擺動噴管空間位姿測量[10]。機器視覺方案通過使用攝像機拍攝被測目標的單幀或序列圖像,然后利用圖像處理、圖像分析等技術來測量目標的結構參數。視覺測量屬于非接觸測量范疇,在測量過程中對目標沒有影響,可以在復雜環境下工作。因此,它適用于動態目標的結構參數和運動狀態的測量,具有較高的測量精度和可靠性[11]。
本文提出了一種基于攝影測量+機器視覺的實時測量方案。首先,確定視覺測量系統坐標系與噴管運動坐標系之間的轉換關系,采用單目相機對靶標實時成像,得到靶標運動軌跡。由于靶標是人為設定好的,因此可以根據后續的圖像處理情況以及定位跟蹤情況,對靶標進行調整,直至滿足要求。然后,對靶標的運動軌跡進行曲線(面)擬合,采用截面法得到擺動噴管的瞬時擺軸。最后,建立噴管擺動瞬時軸線和擺心、擺角的計算模型,實現擺動噴管運動參數的測量。
1 擺動噴管位姿測量系統結構
1.1 噴管位姿測量總體方案
在擺動噴管和驅動擺桿上放置靶標物——靶標1和靶標2,理想中的靶標放置位置應在驅動擺桿所在的中心參考擺動軸線上,如圖1所示。在噴管和驅動擺桿運動的同時,使用單目相機對靶標進行實時成像,通過數字圖像處理技術,如二值化、輪廓提取等,對靶標進行定位與跟蹤,計算出兩個靶標的三維位移,即得到驅動擺桿和噴管的三維運動軌跡。
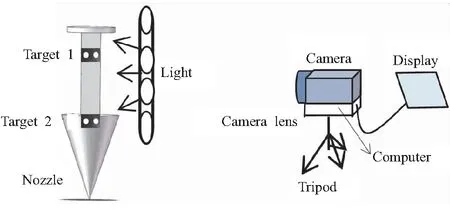
圖1 整體測量方案硬件組成
柔性接頭在受壓情況下,由于彈性材料會反生應變,其擺心在擺動過程當中有一定的漂移。漂移程度和壓強、擺角大小等因素有關,這種現象稱為擺心漂移[12]。基于上述理論,對火箭噴管擺心和擺角的測量均離不開對噴管軸線的準確定位。本文通過對靶標運動軌跡進行擬合,以相鄰點連線的中垂線作為瞬時軸線,利用瞬時軸線過擺心這一特點,瞬時軸線兩兩相交的交點為擺心[13]。
1.2 單目視覺測量系統
式中k為比例系數;b為瞬時軸線與Zw軸截距,為常數項。

圖2 靶標示意圖
本測量方案依賴于單目視覺測量系統[14]。機器視覺測量通過鏡頭和相機實時完成對靶標圖像的采集,并將采集的圖像進行數字圖像處理,得到靶標物的實時三維運動軌跡。
“‘萬’就是要利用3年的時間服務1萬戶種植大戶,這些大戶包括家庭農場、農業專業合作社、公司化經營的種植基地,這是我們目標客戶的調整。”楊福旺表示,對這些大戶,天脊集團要進行更加精細化的服務措施,幫助這些大戶節約成本,生產出高品質的農產品。
2 測量原理
為了進一步探究微滴包埋實驗中碳納米管纖維和樹脂微滴之間的破壞機理,利用掃描電子顯微鏡對微滴發生滑移后的樣品進行觀察,SEM圖如圖5所示.在滑移后的微滴端部,可以清晰地看到被少量樹脂包覆的碳納米管.這一現象表明,在微滴樣品制備過程中,樹脂基體部分進入碳納米管纖維的表面空隙中,致使微滴在滑移過程中將部分碳納米管從纖維表面剝離.
2.1 單目視覺測量原理
相機成像原理可以簡化為小孔成像。圖3為小孔成像模型。
高中物理教師在進行學生探究的過程中,要抓住物理知識的本質規律,讓學生的探究能力能夠進一步的發展和提升,而不是在一些細節問題上進行來回的探討,既浪費時間,也降低了學生的探究效率.注重知識本質,淡化細節問題,可以更有效的讓學生掌握物理知識的關鍵點,從而提升學生的探究能力和創新能力,達到高效教學的目的.
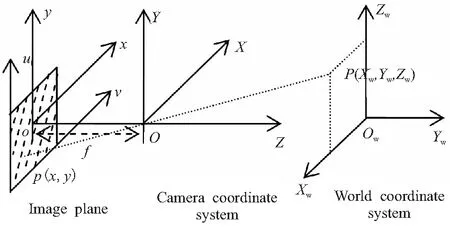
圖3 小孔成像模型
其中,(o-uv)為以像素為單位的坐標系,o為像平面中心點即為圖像主點;(o-xy)以圖像主點o為原點,以mm為單位建立的圖像坐標系;(O-XYZ)為相機坐標系,O為相機光心,Z軸與光軸重合,指向相機外側;(O-XwYwZw)是世界坐標系。設靶標經相機成像在像平面上后的圓心距為l,靶標在光軸方向上的位移量為
(1)
式中Z為相機到靶標所在平面的距離;f為相機焦距;u為相機每個像素的尺寸;N為靶標圖像的圓心距所占的像素個數。
本方案所使用的人為設置靶標可以針對不同的實驗環境進行設計,在保證不影響被測主體的前提下,合理設計靶標可以有效提高測量效率和精度。
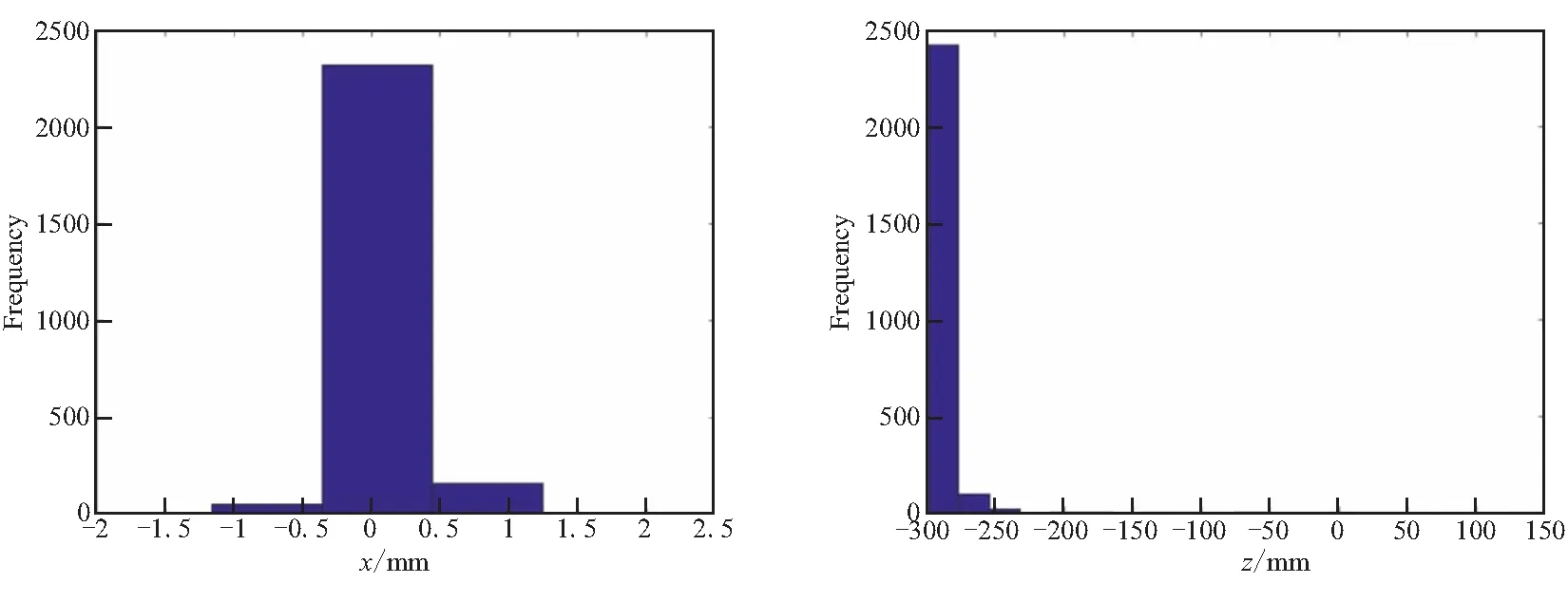
由于柔性接頭的擺心并不固定,而是會受到壓強、溫度等環境因素的影響,擺心會漂移,因此更關注的是擺心集中分布的區間。在剔除偏離程度很大的異常點之后,得到x、z兩個方向上的頻數分布直方圖,如圖9所示。本文做了量化統計,統計了90%的點落在的區間為:x∈[-0.6,0.7],z∈[-289.8,-276.2](單位:mm)。
噴管擺動過程中,某一時刻t采集的圖像與起始時刻t0采集的圖像中,靶標在像平面上的位移量在(o-xy)圖像坐標系下為Δx和Δy,在世界坐標系(O-XwYwZw)下的位移量為ΔX和ΔY,則有如下對應關系:
(2)
建立以t0時刻靶標初始點為原點的世界坐標系,由式(1)、式(2)可以測量出靶標在三個坐標軸的方向上的位移量,得到了t時刻靶標的世界坐標。
測量原理包括單目視覺測量原理和固體發動機擺動噴管瞬時軸線測量原理。
2.2 噴管軸線測量原理
火箭噴管圍繞擺心擺動,且任意時刻的瞬時軸線過擺心。將靶標放置在驅動擺桿上,使用伺服液壓作動器使驅動擺桿帶動噴管在平面周期擺動,其擺動示意圖如圖4所示。
目前,公認具有這一能力的姑娘是信小呆。上一個這樣的平民女神還是楊超越。窮苦出身,唱跳欠佳,卻能依靠粉絲投票在選秀中名列前茅。于是,被網友奉為“躺贏”的錦鯉,好運的象征。
5.7.3 呼吸困難 進行膈神經移位術后要嚴密觀察呼吸情況并進行氧飽和度的監測。呼吸困難嚴重時可使用正壓呼吸機輔助通氣,加強腹式呼吸訓練,刺激神經恢復,逐漸脫機恢復自主呼吸。
(Xi-X0)Z+(Z0-Zi)X+X0(Zi-Z0)+Z0(X0-Xi)=0
(3)

圖4 噴管平面周期擺動
由ti和ti+1時刻求得的瞬時擺軸滿足以下公式:
木犀草素·4,4′-聯吡啶藥物共晶對小鼠巨噬細胞RAW264.7的抗炎作用研究 ……………………………… 劉立新等(5):602
(4)
本文主要針對柔性噴管在不同壓強下周期擺動的可靠性測試,圖2為人為設置的靶標示意圖,圓直徑d和圓心距D已知。
噴管周期擺動時,以起始點t0=0時刻靶標位置為原點建立世界坐標系Ow-XwZw,使用單目視覺測量系統來確定靶標位置坐標。靶標在任意時刻ti(i≠0)的坐標設為(Xi,Zi),擺心坐標設為(X0,Z0)。則ti時刻的瞬時擺軸表達式為
系統通過錄入河道等級、起訖點、長度基本信息,通過實時觀測反饋閘站內外水位、雨量信息,以定位查看、查詢詳情,通過河道漂浮物和保潔船只的實時監控,整合現有保潔船GPS系統,實現對保潔船的統一管理,并對主要河道水質進行實時監測、現場監控和監測數據分析,合理有序調度河道保潔船只和河道自凈工程設備進行河道保潔和水環境治理,實現河道及水源地的實時監測、實時預警、實時調度與應急處理。
實際情形中,噴管不止在一個平面內進行擺動,而是空間擺動。為解決噴管空間擺動時擺心擺角的測量問題,在噴管平面周期擺動測量的基礎上,加裝一個靶標物。其擺動示意圖如圖5所示。
靶標的理想位置應在驅動擺桿的中心參考擺動軸線上,在此情形中的任意時刻,兩個靶標物的中心也即靶標上兩圓圓心連線的中點,其連線必過擺心。但實際操作中,很難保證兩個靶標的位置滿足理想情形,可以采取“標定”的方法來消除靶標實際位置的偏差,也可以對兩個靶標的三維運動數據分別進行“截面法”處理,以得到空間擺動情形下的擺心、擺角參數測量。
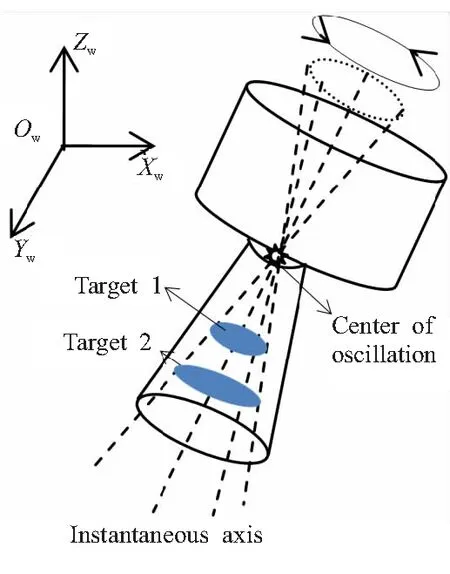
圖5 噴管圓周擺動示意圖
綜上所述,利用單目視覺測量原理得到靶標的實時三維運動軌跡,通過擺動噴管軸線測量原理從運動軌跡中確定擺動噴管的瞬時軸線,最后建立噴管瞬時軸線與擺心、擺角的計算模型,計算得到噴管的空間運動參數。
3 實驗驗證與結果分析
3.1 實驗設備及實驗環境
為了驗證本方案的有效性,進行了實地試驗。實驗設備包括單目視覺測量系統實驗設備和控制擺桿及噴管擺動的實驗平臺。圖6給出了噴管運動視覺測量系統的示意圖,圖中用機械臂代替了實地實驗中控制噴管擺動的擺動測試工業平臺。
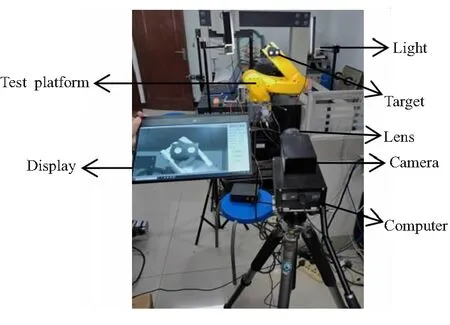
圖6 噴管運動視覺測量系統示意圖
相機采用GS3-U3-23S6M(黑白),分辨率為1920×1200像素,像素尺寸為0.005 86 mm,最高幀率達到162 Hz。鏡頭采用尼康生產的50 mm定焦鏡頭。控制擺桿及噴管擺動的實驗平臺包含X、Y兩方向上的伺服液壓作動器,通過這兩個作動器來帶動擺桿進行轉動。考慮到高速相機在進行拍攝時對光源的照明亮度要求高,因此采用了對稱式光源為整個視覺測量系統提供穩定的照明。
實驗前,將相機固定在三腳架上,受到現場測試環境影響,相機對靶標的成像距離在3 m左右。實地試驗完成了在2個不同壓強、3個不同輸入波形下的噴管擺動空間位姿測量。
3.2 單向擺動試驗
在某一確定壓強下,X方向或Y方向上的伺服液壓作動器,以頻率為0.2 Hz的三角波作為輸入波形,擺動5個周期,擺動設定擺角為6°。通過本系統完成對靶標物的捕獲,由于相機的幀頻較高且目標圖像處理速度很快(約100 Hz),通過實時對高速相機采集的圖像進行數字圖像處理,得到了靶標的實時運動軌跡數據,其輸出波形如圖7所示。
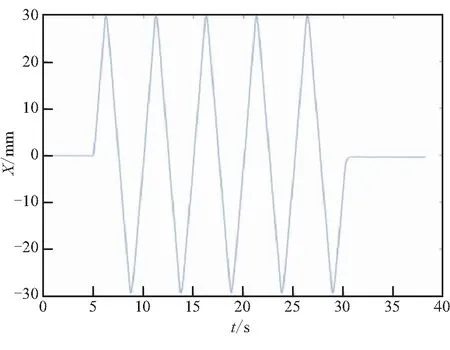
圖7 三角波輸出波形
針對擺心漂移的測量可以采用兩點法、弦長法和擬合法。三種方法求解擺心的核心均是確定任一時刻的瞬時擺軸,由瞬時擺軸相交過擺心這一特性確定擺心。使用這三種方法對擺心漂移進行求解,得到的擺心位置分布結果如圖8所示。
中外運-敦豪國際航空快件有限公司近日在其北京總部舉行媒體發布會,宣布其珠海口岸正式落成并投入使用,成為落戶珠海口岸國際快遞監管中心的首家國際快遞公司。此外,DHL正式宣布將持續加大在中國的戰略投資,對外公開了今年以來的一系列投資舉措。DHL稱,借助港珠澳大橋帶來的高效物流通道,DHL珠海口岸的建立將大幅提升珠江西岸地區國際物流的快遞效率。隨著2018年10月24日港珠澳大橋正式通車,由珠海口岸清關的國際快遞轉運至其香港轉運中心(DHL全球三大轉運中心之一)的時間將從原來的4小時縮短為45分鐘,大大提升了轉運時效。而這對于專業做國際限時快遞服務的DHL來說,尤為重要。
噴管在試驗過程當中的左右擺動角度是監測柔性噴管質量、火箭推力偏心性、伺服機構工作性能和推力向量控制系統性能等的重要測試和參考指標。在確定各瞬時擺軸位置后,擺角可以由瞬時擺軸擺動到左右最大角度的夾角來求解。

(a) Two point method (b)Chord length method (c)Fitting method
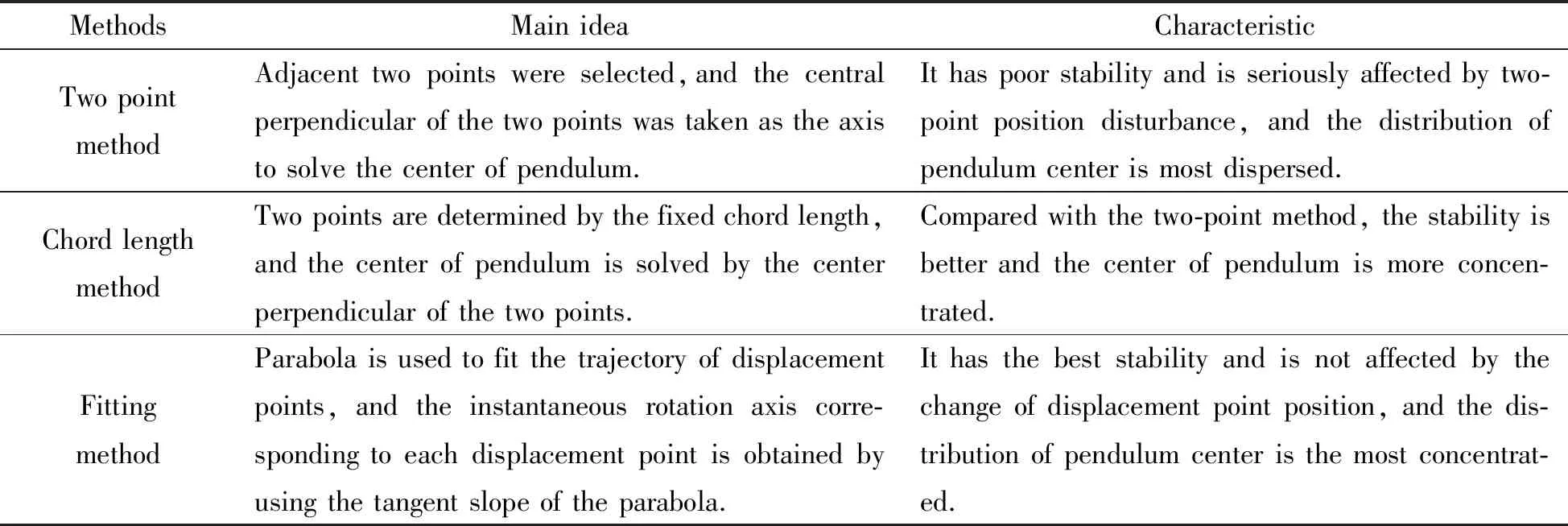
表1 兩點法、弦長法和擬合法對比
(a)x direction (b)z direction
根據得到的瞬時擺軸位置,由瞬時擺軸左右擺動到最大角度的位置來確定擺角。表2給出了在兩種不同壓強下,分別輸入頻率為0.2 Hz的方波、三角波以及正弦波,擺動5個周期,擺動設定擺角為6°,利用本文測量方案實時測量得到的擺角。本測試方案在不同壓強和不同輸入波形對固體發動機擺動噴管的擺角測量中,具有一定的測試精度和穩定性。當設定擺動角度為6°時,由于受到系統誤差以及偶然誤差等因素影響,測試得到的結果雖有波動,重復實驗結果表明,整體測量結果趨于一致,說明本方案具有良好的測試穩定性。
首先,行政等級高的城市,基本公共服務總體水平明顯高于其他城市。在總體基本公共服務水平前5名中,上海、南京、杭州在列,處于領先地位。在其他幾類公共服務排名中,也同樣如此。這些城市行政等級高,城市規模大。這是因為基本公共服務的水平不僅取決于地方政府的財政收入,還取決于當地居民對服務的消費需求。后者正是受到城市規模即市場大小的直接影響。然而除了滬寧杭三市外,長三角其他各市人口水平相似,卻在基本公共服務的供給水平上參差不齊。這說明,基本公共服務水平受到城市行政等級、經濟發展水平影響更大,受城市規模影響較小。
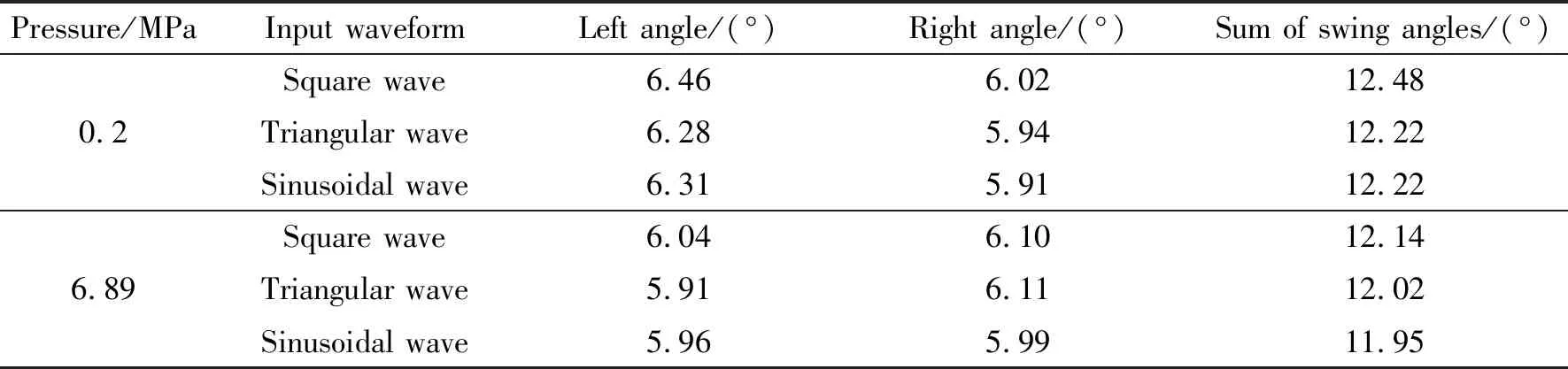
表2 方波、三角波和正弦波在0.2 MPa及6.89 MPa下擺角
3.3 圓周擺動試驗
本方案還測試了在圓周擺動情形下的噴管擺動空間位姿情形。圓周擺動試驗是指同時在x、y兩個方向上,伺服液壓作動器以0.2 Hz的頻率擺動5個周期,擺角為6°,輸出波形均為正弦波。依據單目視覺測量系統,利用實時得到的靶標三維運動軌跡得到驅動擺桿的圓周擺動波形,如圖10所示。同時得到了驅動擺桿在x、y方向上的正弦波輸入波形,如圖11所示。

圖10 驅動桿圓周擺動波形

圖11 x、y方向輸入波形
依據李薩如圖形相關理論知識,這兩個輸入波形相位差為π/2,且沿著互相垂直方向的正弦振動的合成的軌跡圖形應為橢圓,采用單目視覺實時測量系統得到的實際擺動軌跡與理論輸出波形一致。針對火箭噴管的空間擺動軌跡情形,采用本方案能夠得到實時運動軌跡,本文僅就圓周擺動情形下的軌跡測量給出說明,圓周擺動情形下的相關參數(如擺心、擺角等)測量不再給出。
4 結論
本文通過單目視覺實時測量方案,對固體發動機擺動噴管在不同壓強和不同波形下的擺動情形進行了擺心和擺角的測量。實驗結果表明,該實時測量技術測量準確度高,耗時低,穩定性好,實驗操作簡便,能夠滿足擺動噴管空間位姿的測量要求。本測量方案具有以下三個特點:
集中集熱分戶儲熱太陽能熱水系統現場總線控制應用分析……………………………………… 劉瑋,尹立增,郭衛星(3-46)
(1)在單目視覺測量系統中,利用人為設置的靶標實現了單目視覺測量系統快速實時獲取靶標的三維運動軌跡。且靶標能夠根據不同的現場工業環境進行定制化設計,以適應實時性測量要求。
(2)處理三維運動軌跡時,結合實際運動模型,提出了擬合法來對軌跡進行處理。和“兩點法”等方法相比,“擬合法”有效降低了數據量,提升了數據處理效率,同時求解的擺心分布更加集中,90%的點落在的區間為:x∈[-0.6,0.7],z∈[-289.8,-276.2](單位:mm)。在不同壓強以及不同輸入波形的實驗中,當輸入擺角設定為6°時,擺角的求解結果趨于一致,測量穩定性良好。
(3)該系統不僅可以對單靶標進行跟蹤測量,對多靶標也可以進行跟蹤測量,借助多靶標可以完成火箭噴管圓周擺動的運動軌跡測量,相比多目視覺測量系統,系統操作簡便。
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00
