長基線天線六自由度激光測量技術
2021-02-14 15:04:46郭賢斌焦曉光劉冠宇
制導與引信 2021年4期
關鍵詞:測量
高 潔, 郭賢斌, 焦曉光, 劉冠宇, 王 瑞
(1.上海無線電設備研究所,上海 201109;2.上海宇航系統工程研究所,上海 201109)
0 引言
六自由度測量不僅在柔性制造、自動裝配、數控機床檢測、光纖對接耦合以及多自由度平臺等領域具有廣泛應用[1-4],而且對空間長基線天線位移和姿態的多自由度、高精度測量有重要意義。長基線天線在軌展開的過程中,會遇到兩個問題:一是展臂呈現大撓性結構特征,二是各種擾動會引起伸展臂末端運動。上述問題將導致天線的位置和指向發生變化,進而影響雷達成像的相干性或直接引入干涉相位誤差。因此,空間長基線天線高精度六自由度在軌測量成為亟待解決的問題。當前主流的多自由度測量系統包括三坐標測量、雙目視覺六自由度測量、基于全反射原理的五自由度測量、多光束六自由度測量、基于全息透鏡的六自由度測量等系統[5-8]。這些測量系統,雖然已經能夠實現對目標的多自由度測量,但普遍存在系統過于復雜、價格非常昂貴、測量精度不高等問題。為此,有必要研發一種結構簡單、體積小、操作方便、測量精度和可靠性高的六自由度測量系統。
針對空間長基線天線多自由度、高精度測量需求,本文提出了一種基于激光干涉測長、自準直測角和細光束測位移的激光基線測量系統。利用該系統完成六自由度測量實驗,并將測試結果與P I公司的高精度六足控制臺的測試結果對比,驗證系統測試性能。
1 六自由度測量原理
1.1 測量系統結構
同時用于基線相對長度、偏轉角、位移和俯仰角測量的六自由度測量系統結構如圖1所示。
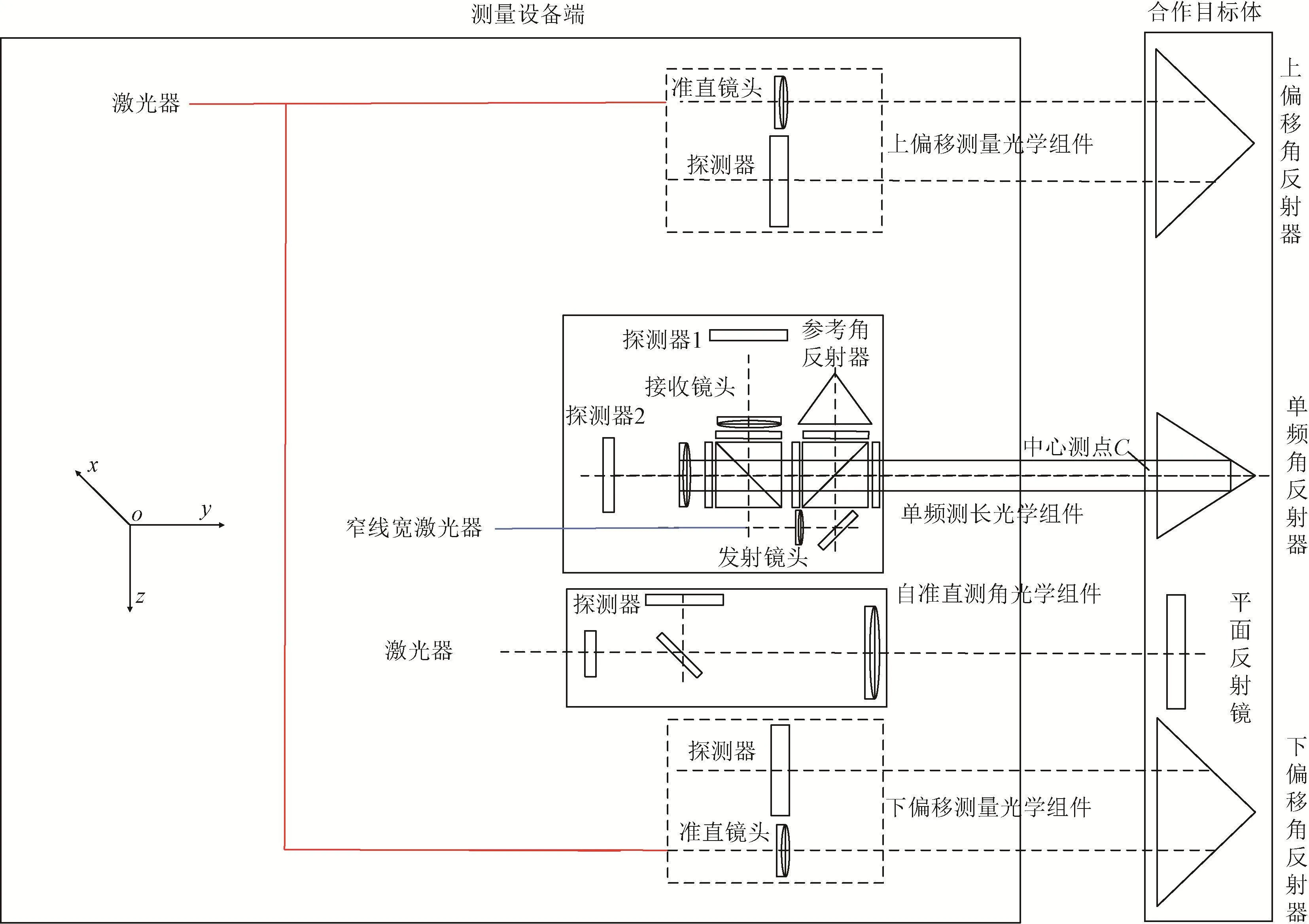
圖1 六自由度測量系統結構圖
該系統由測量設備端和合作目標體兩部分組成。合作目標體安裝在待測物體上,隨待測物體移動。測量設備端由上偏移測量光學組件、下偏移測量光學組件、單頻測長光學組件和自準直測角光學組件組成。合作目標體由上偏移角反射器、下偏移角反射器、單頻角反射器和平面反射鏡組成。在圖1顯示的o x y z坐標系中,中心測點C位于單頻角反射器光學面幾何中心位置。上偏移角反射器和下偏移角反射器用于中心測點C在x和z方向位移量Δx和Δz的測量,兩者聯合可獲得俯仰角θy的測量參數,θy為oxz平面上沿y軸的轉角。單頻角反射器用于中心測點C相對長度Δ y的測量。平面反射鏡用于中心測點C偏轉角θx和θz的測量,θx為oyz平面上沿x軸的轉角,θz為oxy平面上沿z軸的轉角。
1.2 基線相對長度測量
基線相對長度Δ y利采用單頻激光干涉原理實現測量,系統組成包括測量設備端和合作目標體兩部分,如圖2所示。
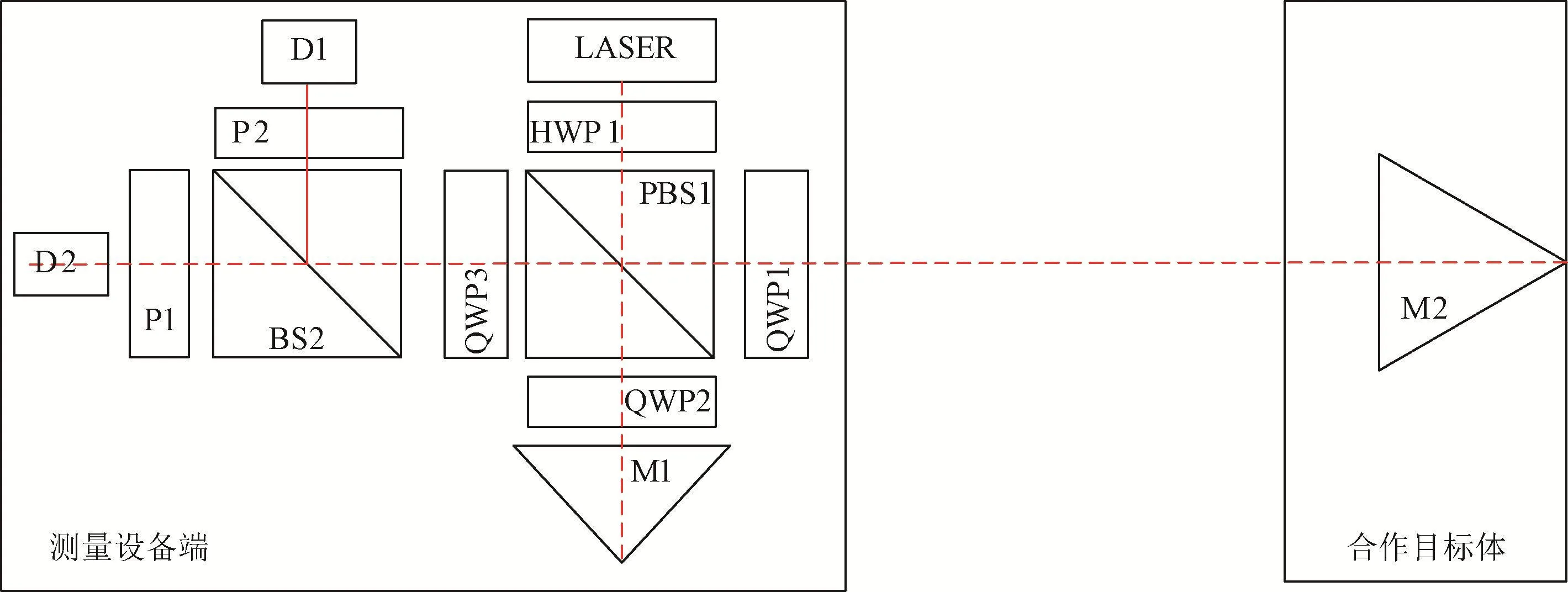
圖2 單頻激光干涉測長原理
測試設備端的激光器LASER發出的光經1/2波片HWP1入射到偏振分光棱鏡PBS1上,反射光經1/4波片QWP1入射到動角反射器M2上,透射光經1/4波片QWP2入射到角反射器M1上。由合作目標體端的動角反射器M2返回的光經偏振分光棱鏡PBS1和1/4波片QWP3入射到分光棱鏡BS2上。由分光棱鏡BS2分光后的兩束光分別經過偏振片P1和P2入射到探測器D1和D2上。
動角反射器M2為單頻角反射器,當M2隨合作目標體沿y軸方向移動λ/2時(λ為激光器的工作波長),探測器D1和探測器D2接收的光程差就改變了一個波長。于是干涉條紋就產生一個周期的明暗變化,這個變化的條紋信號通過兩個光電探測器接收并轉化成交變的電信號。應用移相方法將干涉條紋分為兩組,彼此相位偏移π/2,分別經光電轉換后,輸出兩組彼此位移偏移π/2的光電信號。這兩組光電信號分別經過放大、整形、倒相,變成4個相位依次差π/2的矩形脈沖,再經波形變換電路變換成尖脈沖。通過判向電路把一個周期的干涉條紋變成4個脈沖輸出信號。因此在測長時,當條紋變化一條時,可逆計數器顯示4個脈沖數。這等于把條紋細分成4份,即4倍頻計數,每一脈沖代表λ/8的移動量。則所測長度

式中:N為動角反射器M2移動時干涉條紋變化的周期數。至此實現了以光的波長為標尺對物體距離進行檢測的目的。由式(1)可知,測長系統的測量精度為λ/8。本系統中采用λ=1.55μm的窄線寬激光器作為激光光源,測長精度約為0.2μm。
1.3 天線橫滾角和天線偏航角測量
天線橫滾角θx和天線偏航角θz采用自準直測角原理進行測量。自準直測角系統由光學組件及合作目標組成,其中光學組件包括光源、分光棱鏡、長焦物鏡和電荷耦合器件(CCD),其合作目標為平面鏡,如圖3所示。
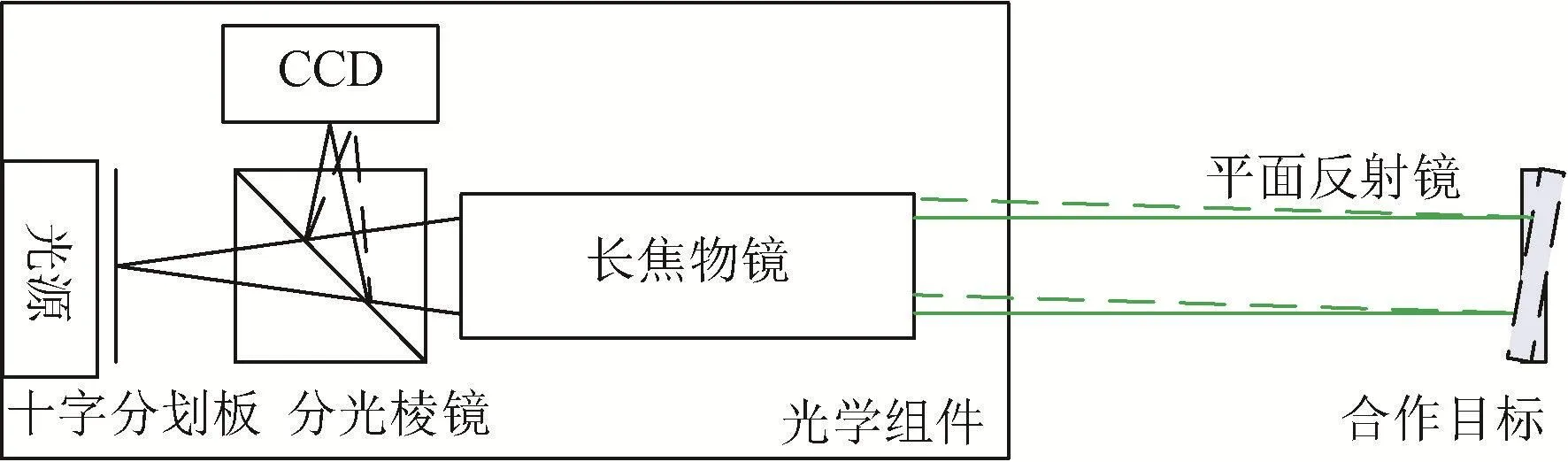
圖3 自準直測角系統
自準直測角的過程為經過勻化的光束通過十字分劃板及分光棱鏡進入長焦物鏡,形成準直光束照射到平面鏡上,反射光線通過準直物鏡匯聚到CCD像面上。十字分劃板和CCD像面共軛。當平面鏡與準直光束垂直時,CCD像面上的十字劃線處于像面中心,當平面鏡與準直光束存在夾角時,CCD像面上的十字劃線將在像面中移動,移動量與夾角一一對應。
自準直測角原理如圖4所示。f′為物鏡焦距,在物鏡焦點處發光點O所發出的光線經物鏡成為一束平行光出射,再經反射鏡反射。如果反射鏡垂直于儀器的光軸,光束將沿原路線返回,在同一位置處形成自準直像O′,即發光點O的自準直像O′與O重合,如圖4(a)所示。當反射鏡偏轉角度δ時,反射光將偏轉角度2δ,自準直像在O′處,相對于O產生位移t,如圖4(b)。
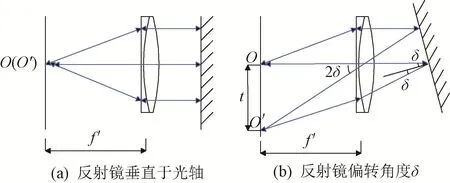
圖4 自準直測角原理
從光線與O和O′所形成的直角三角形可以看出

即

沿x軸旋轉的偏轉角度δ即為天線橫滾角θx,沿z軸旋轉的偏轉角度δ即為天線偏航角θz。系統中CCD的測量精度可達到10μm,若光學系統的焦距為300mm,則系統的測角精度約為3.4″。
1.4 基線傾角、偏航角和天線俯仰角測量
基線傾角θ1、偏航角θ2和天線俯仰角θy的測量采用細光束測位移的方法,如圖5所示。
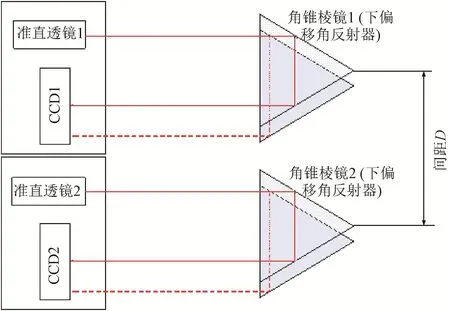
圖5 細光束測位移及俯仰角原理
圖5中,光束經分束器后分成兩束光,光束1經過準直透鏡1準直后,作為測量光束入射到角錐棱鏡1上。角錐棱鏡1安裝在待測目標上,隨待測目標一起移動,經角錐棱鏡1反射的光束入射到探測器CCD1上。同樣地,光束2經過準直透鏡2準直后,作為測量光束入射到角錐棱鏡2上,經角錐棱鏡2反射的光束入射到探測器CCD2上。當待測目標旋轉一個角度時,照射到角錐棱鏡上的光束就會發生相對位移,由探測器測量其位置變化。實際測量過程中,激光器和探測器固定不動,角錐棱鏡隨被測物體運動,因此只有經過角錐棱鏡反射到探測器上的光束會發生位移變化。相應的探測器可以檢測到光斑沿z向和x向的位移Δz和Δx

式中:d是像元尺寸;m1,m2分別是CCD1和CCD2上光斑的x向位移;n1,n2分別是CCD1和CCD2上光斑的z向位移。
通過測量雙光束光斑的偏移及雙角錐棱鏡之間的距離,即可計算得出俯仰角

式中:D是兩個角錐棱鏡之間的中心距。
由Δz和Δx結合目標端和測量設備端的距離L,就可計算得到基線傾角θ1和偏航角θ2,即

測角系統中探測器CCD1和CCD2的測量精度可達10μm,位移測量精度可達5μm,角錐棱鏡之間的距離為300mm,天線俯仰角測量精度約為3.4″。
2 實驗裝置
根據上述測量原理,搭建六自由度測試實驗裝置,如圖6所示。
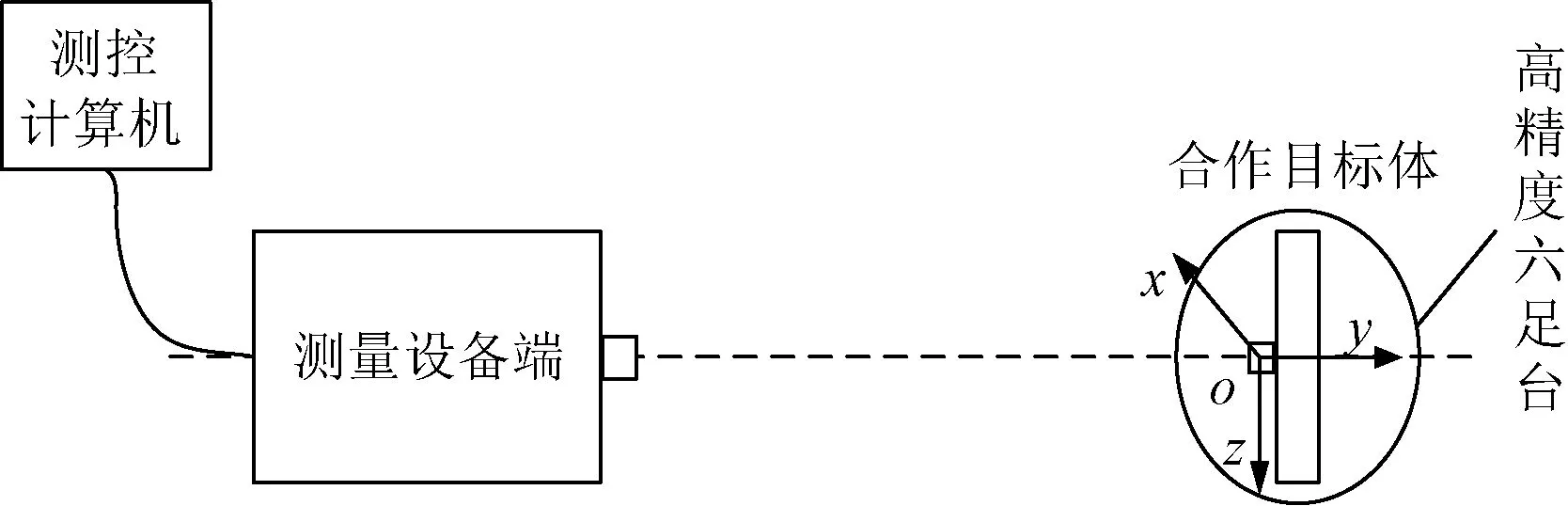
圖6 六自由度測試實驗裝置
將測量設備端通過轉接支架固定在光學平臺上,將合作目標體安裝在高精度六足臺上。六足臺是具有高精度六自由度的可調節設備,能夠實現亞微米級的位移和微弧級的角度轉動,并且允許設定回轉中心。系統測試時,首先利用自準直儀通過基準鏡將測量設備端與合作目標端的零位對齊,將合作目標到測量設備的距離誤差標定到±0.5mm,調整合作目標位置使光軸指向偏差在2″以內;然后通過調整六足臺的位移及旋轉角度控制合作目標的姿態,記錄六足臺的調整量和六自由度測量設備輸出的數據得出測量結果;最后對比測量結果和六足臺的姿態數據。
3 測量結果與分析
實驗中,分別對基線相對長度Δy、天線橫滾角θx、天線偏航角θz、基線傾角θ1、基線偏航角θ2和天線俯仰角θy進行了測量。
(1)基線相對長度
沿y軸向以微米級精度調整高精度六足臺位置,即改變合作目標體的位置,采用單頻激光干涉原理測量基線相對長度Δy。基線相對長度測量結果如表1所示,每組數據為測量500次平均測量結果。通過數據分析可知,5組基線相對長度測量數據與真值的最大誤差為2.7μm。
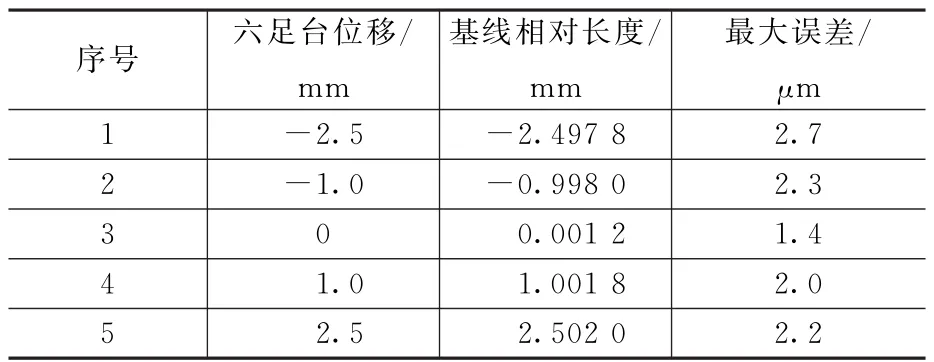
表1 基線相對長度測量結果
(2)天線橫滾角
繞x軸以微弧級精度調整高精度六足臺的轉動角度,利用自準直測角原理測量天線橫滾角θx,測量結果如表5所示。每組數據為測量500次的平均測量結果。通過數據分析可知,5組測量數據與真值最大誤差為4.16″。
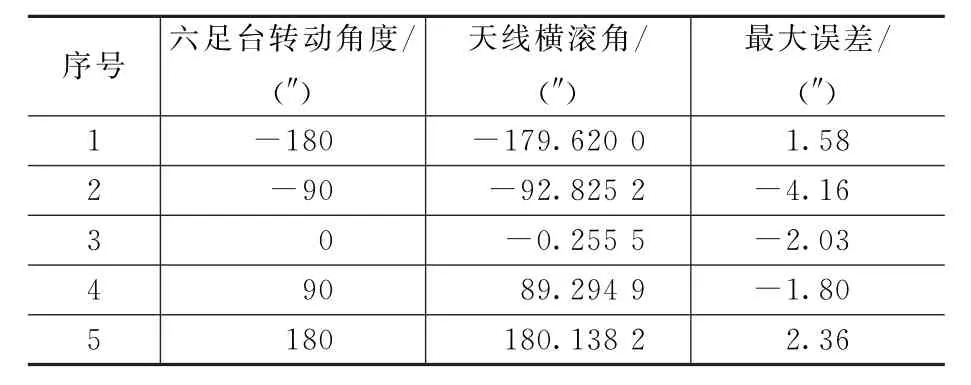
表2 天線橫滾角測量結果
(3)天線偏航角
繞z軸以微弧級精度調整高精度六足臺的轉動角度,利用自準直測角原理測量天線偏航角θz,測量結果如表3所示。每組數據為測量500次的平均測量結果。通過數據分析可知,5組測量數據與真值的最大誤差為1.8″。
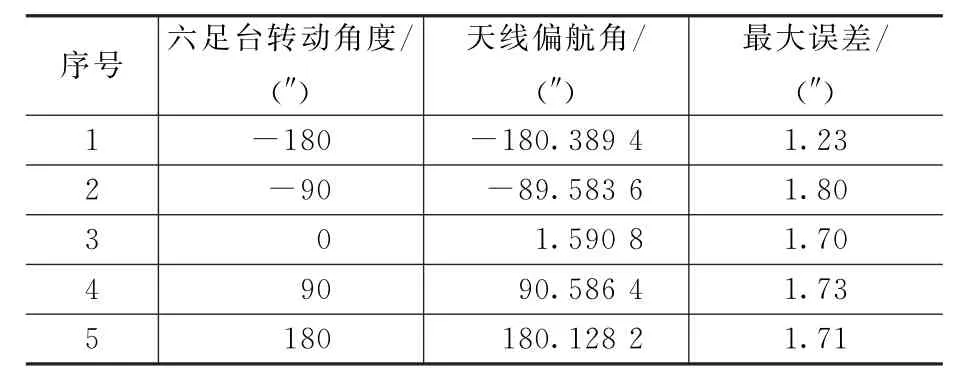
表3 天線偏航角測量結果
(4)基線傾角
沿z軸向以微米級精度調整高精度六足臺位置,采用細光束測位移方法測量合作目標體基線傾角θ1,測量結果如表4所示。每組數據為測量500次的平均測量結果。通過數據分析可知,5組測量數據與位移/角度真值的最大誤差為4.1μm/0.0846″。

表4 基線傾角測量結果
(5)基線偏航角
沿x軸向以微米級精度調整高精度六足臺位置,采用細光束測位移方法測量基線偏航角θ2,測量結果如表5所示。每組數據為測量500次的平均測量結果。通過數據分析可知,5組測量數據與位移/角度真值的最大誤差為-3.1μm/-0.0639″。

表5 基線偏航角測量結果
(6)天線俯仰角
繞y軸以微弧級精度調整高精度六足臺的轉動角度,采用細光束測位移的方法測量天線俯仰角θy,測量結果如表6所示。每組數據為測量500次的平均測量結果。通過數據分析可知,5組測量數據與真值的最大誤差為-4.42″。

表6 天線俯仰角測量結果
由上述實驗結果可知,采用本文所提測試方法,利用高精度六足臺控制合作目標的位移及轉動角度模擬長基線天線在軌姿態變化,可以滿足長基線天線六自由度的測量需求。測試距離為10m時,長度測量精度優于5μm,基線傾角測量精度優于0.1″,天線姿態角測量精度優于5″。
4 結論
本文提出了一種基于激光干涉測長、自準直測角、細光束測位移的六自由度測量系統。該系統測試結果與P I公司高精度六足臺輸出數據進行對比,證明該系統可以實現長度測量精度優于5μm,基線傾角測量精度優于0.1″,天線姿態角測量精度優于5″的高精度測量。該系統具備操作性強、精度高和可靠性高的特點,可廣泛應用于空間機構展開、光學薄膜展開以及大口徑天線高精度、多自由度測量等場合。
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00
