基于激光測距的飛機著陸滑行燈靶板自動化校準系統
2021-02-11 04:14:56夏清鷹鐘學敏任培武龍良剛李卓隆朱杰
計測技術 2021年6期
夏清鷹,鐘學敏,任培武,龍良剛,李卓隆,朱杰
(航空工業成都飛機工業(集團)有限責任公司,四川 成都 610091)
0 引言
著陸滑行燈是飛機著陸及滑行過程中安全措施系統的重要組成部分[1],尤其是執行夜間任務時,著陸滑行燈工作狀態的好壞直接影響飛行員執行相關著陸及滑行操作的效果以及塔臺讀取飛機著陸及滑跑狀態有效信息的準確性[2],因此保證著陸滑行燈工作狀態符合要求具有重要意義。安裝飛機的著陸滑行燈時,飛機處于與地面水平的狀態,將著陸滑行燈照射方向的中心位置調整至位于飛行員正前方90 m處的地面上,這一過程通常被稱為“校靶”。由于光的發散性,著陸滑行燈在90 m處形成的光斑很大,再加上周圍雜散光的影響,導致完成校靶操作非常困難。且目前國內的校靶工作大多采用人工測量方式,工作效率低、測量誤差大、重復性較差,無法滿足對著陸滑行燈的高準確度校準要求,亟需研究具有自動定位功能的校準系統來代替純人工校準[3-4]。
目前激光測距技術的應用已較為成熟[5-12],并已有采用激光測距技術的裝置應用于著陸滑行燈校靶領域[13-14],在一定程度上提升了校準的便利性,但這些方法仍然需要進行較多人工操作,自動化程度有待進一步提高[15]。針對上述問題,本文研究并提出了一套飛機著陸滑行燈自動化校靶系統。對該系統的工作原理、裝置組成、關鍵參數進行詳細介紹,并開展實際實驗驗證該方法的可行性,為著陸滑行燈數字化、自動化檢測提供重要技術支撐。
1 飛機著陸滑行燈校準分析
1.1 著陸滑行燈校準要求
飛機前起落架雙著陸滑行燈的安裝如圖1所示,為保證著陸滑行燈的照明效果,需對滑行燈進行裝機光學調校。兩個滑行燈的安裝中軸線即飛機的中軸線,在偏航方向上兩燈之間的夾角為4°,且照射方向中心對稱。在俯仰方向上兩燈照射角度為0.5°,在設置的10 m測試距離處滑行燈的照度值應不低于700 lx,并保證燈光照射距離達到90 m。
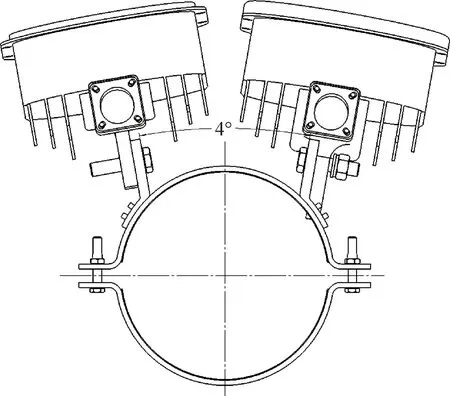
圖1 著陸滑行燈安裝校準示意圖Fig.1 Schematic diagram of landing taxi light installation and calibration
1.2 著陸滑行燈校準方法分析
飛機著陸滑行燈校準示意圖如圖2所示,幾何關系圖如圖3所示。機頭千斤頂頂塊安裝中心點與著陸滑行燈發光面距離d0=3.262 m,實際滑行燈高度設為H0,照射最遠距離為90 m,測試時靶板距離L0=10 m,靶板高度設為H1。
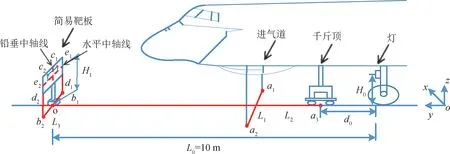
圖2 著陸滑行燈校準示意圖Fig.2 Schematic diagram of landing taxi light calibration
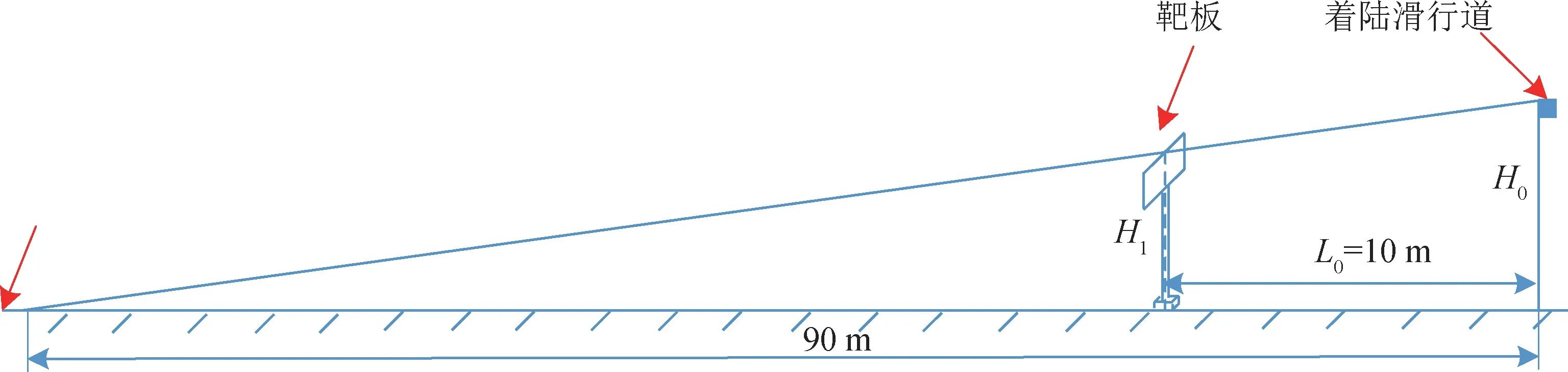
圖3 著陸滑行燈校準幾何關系圖Fig.3 Geometry diagram of landing taxi lights calibration
根據幾何關系,有

著陸滑行燈校準時的主要操作方法為:
1)將簡易激光夾具安裝在前起落架雙著陸滑行燈的燈殼散熱片上,保證簡易激光夾具激光出光面的中心點與滑行燈的中心出光面重合,如圖4所示。
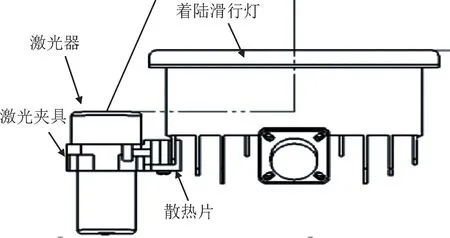
圖4 激光夾具校準安裝示意圖Fig.4 Schematic diagram of laser fixture calibration and installation
2)利用鉛錘分別對飛機雙進氣道基準點作投影,于地面形成投影點a1,a2。
3)在地面用標記筆將a1,a2連線成線段L1。
4)利用鉛錘得到機頭千斤頂頂塊安裝中心點對地面的投影參考點a3,并用標記筆作出標示。
5)過a3點作一條垂直于L1的射線L2,在L2射線上測量得出L0-d0長度的端點o,使得|oa3|=L0-d0;過o點作相交于L2的垂線L3,在L3上放置簡易靶板,使簡易靶板鉛直中軸線在地面的投影與L2重合。
6)測量得出滑行燈中心出光面相對地面的高度H0。
7)校準找平簡易靶板。調校簡易靶板水平中軸線至離地投影點距離為8/9H0的高度H1,再用鉛錘得到簡易靶板水平軸線兩端對地投影點b1,b2,并測量得出投影點b1,b2到靶板水平軸線的鉛錘線長度d1,d2;對比d1,d2的大小,若不相等,則需要重新調校靶板,使d1,d2近似相等,同時保證高度H0基本不變。
8)調校雙著陸滑行燈俯仰及偏航角度,使用卷尺測量激光夾具投射在簡易靶板上的激光點到簡易靶板鉛直中軸線的距離c1,c2,比較c1與c2的相差值K1是否不大于2 cm的允差;測量得出激光點到簡易靶板水平軸線的距離e1,e2,比較e1與e2的相差值K2是否大于1.5 cm的允差。
9)校準找平完成后,關掉環境燈光,使用照度計測量簡易靶板激光點位置上滑行燈光照強度Q是否大于700 lx,若不滿足要求,重復步驟6)~步驟8),直到滿足校準要求。
2 自動化校靶原理
2.1 滑行燈靶板中心位置的激光指示
在飛機前腹千斤頂頂塊正下方設置一臺激光定位小車,利用光學坐標獲取飛機中軸面作為基準面,基準面通過激光投影至靶板。激光定位系統位于飛機機頭千斤頂正下方,激光定位系統中三軸激光儀(如圖5所示)可發射三束互相垂直的準直激光,即鉛錘激光a、水平激光b和天頂激光c。激光a投射在機腹上,與飛機中軸線重合,同時衍射到靶板上;激光b投射在靶板平面上,作為靶板垂直的參考基準線;激光c對準千斤頂支撐位置的中心。

圖5 三軸激光儀示意圖Fig.5 Schematic diagram of three-axis laser instrument
為了實現不開燈調校著陸滑行燈的效果,在燈具測距/校準系統中設計了激光儀(如圖6所示),使該激光儀的激光標記點在10 m外的測試靶板上與滑行燈的光斑中心處重合,以便在測試時用該激光標記點代替滑行燈的中心光強點。
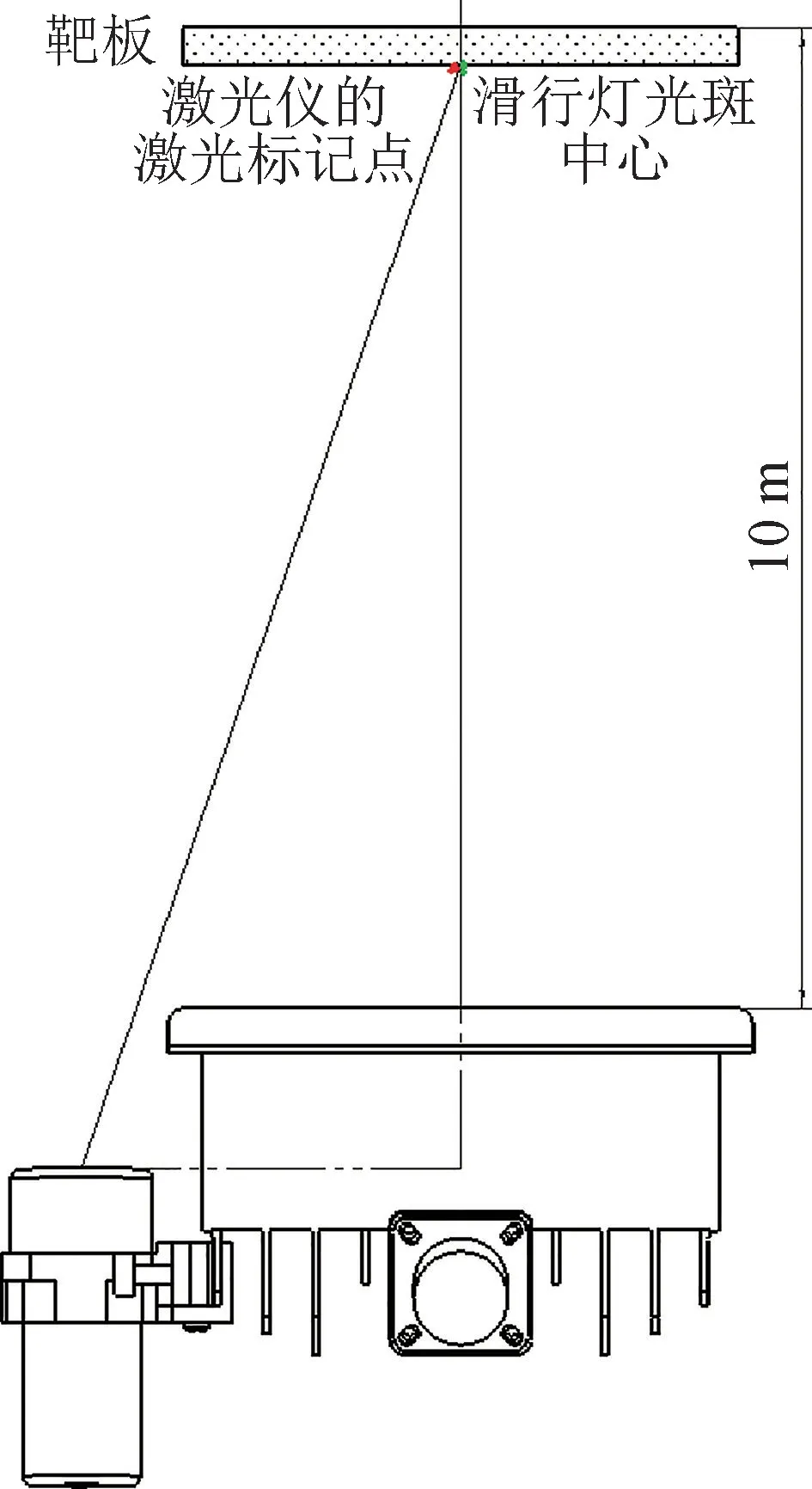
圖6 激光標記點位置示意圖Fig.6 Schematic diagram of the position of the laser marking point
2.2 飛機中軸面與靶板的對準
在靶板上設置感光傳感器、水平傳感器檢測靶板位置,保證靶板既垂直于飛機中軸面又垂直于水平面,如圖7所示。
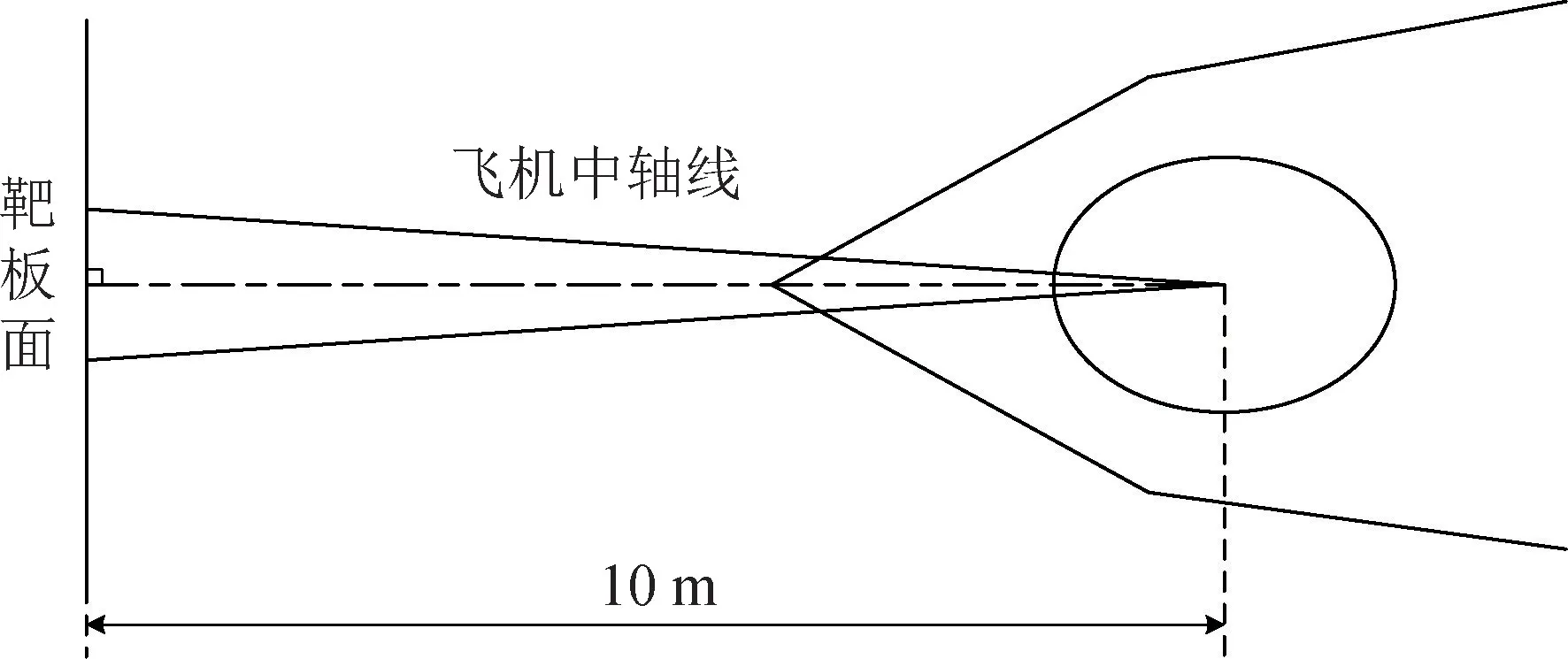
圖7 靶板面與飛機中軸面相互垂直Fig.7 The surface of the target board and the medial surface of the airplane are perpendicular to each other
在飛機中軸面與靶板面相互垂直的條件下,通過觀察激光標記點在靶板上的投影,將左右兩個著陸滑行燈調校至以飛機中軸面為中心對稱,且水平高度一致的狀態。
為保證靶板面和被測飛機的中軸面相互垂直,運用平面與平面垂直的判定定理進行判定,如圖8所示。如果一個平面α經過另一個平面β的一條垂線a,那么這兩個平面互相垂直。
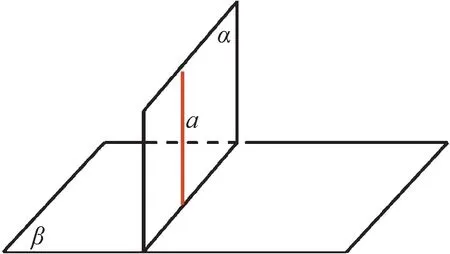
圖8 平面α與平面β相互垂直Fig.8 Planeαand planeβare perpendicular to each other
本文中,使三軸激光儀的垂直激光線與飛機中軸線重合,該垂直激光線和飛機前方10 m處的靶板(可將靶板面看作平面β)相交,通過電機系統自動將靶板面校準為與激光線垂直,此時,可以判定包含了該垂直激光線的飛機中軸面(可將飛機中軸面看作平面α)和靶板面相互垂直。
2.3 靶板自動化調平
電子靶板(如圖9所示)擺放在距離激光定位系統6.732 m的位置上,平移靶板,使靶板上的光源強度感應傳感器與激光a相對重合。
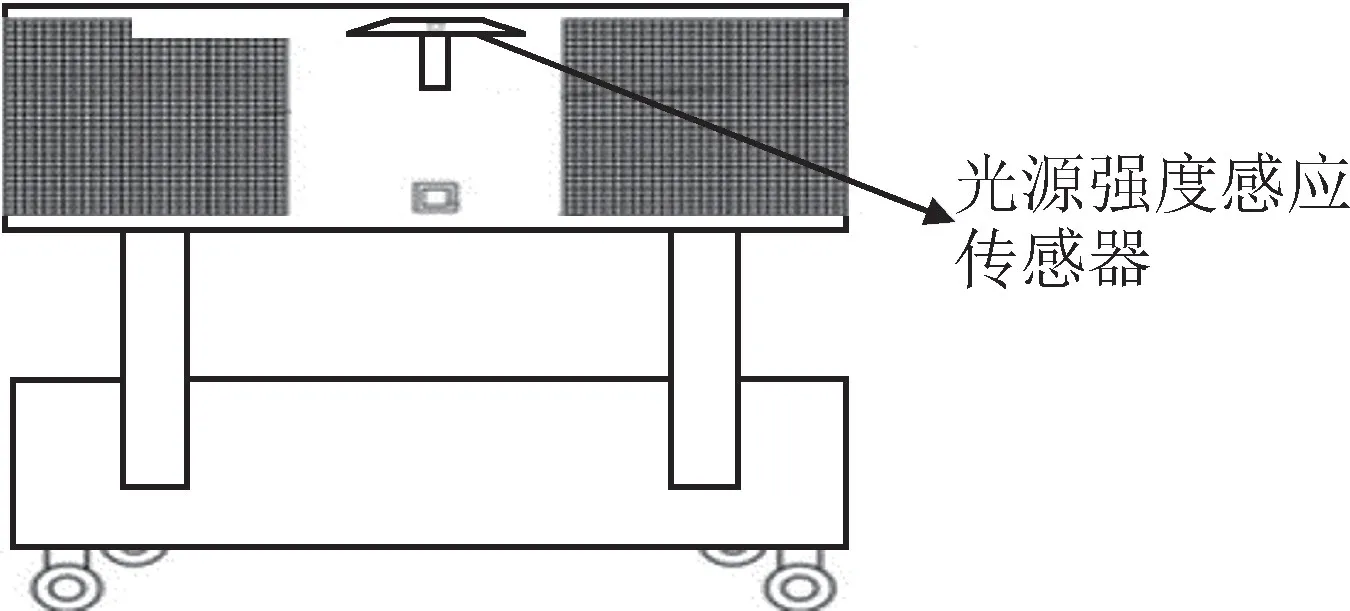
圖9 電子靶板示意圖Fig.9 Schematic diagram of electronic target board
開啟控制單元的電源,靶板系統復位結束后,點擊控制單元上的校準開始按鍵。電子靶板驅動氣缸(如圖10所示)可驅動靶版自動調整其水平、前后、俯仰三個方向的狀態。靶板上的雙軸角位移傳感器檢測靶板水平、俯仰的角度值,并傳送給控制單元,控制單元發送校正指令給水平、俯仰伸縮氣缸,使靶板完成水平、俯仰狀態的調整。靶板上的光源強度傳感器感應激光a的光源強度,當光源強度不是最大值時,其發送指令給控制單元,控制單元控制靶板前后伸縮氣缸,使靶板完成前后偏轉,直到光源強度傳感器感應激光a的光源強度為最大值,靶板完成前后狀態調整工作。
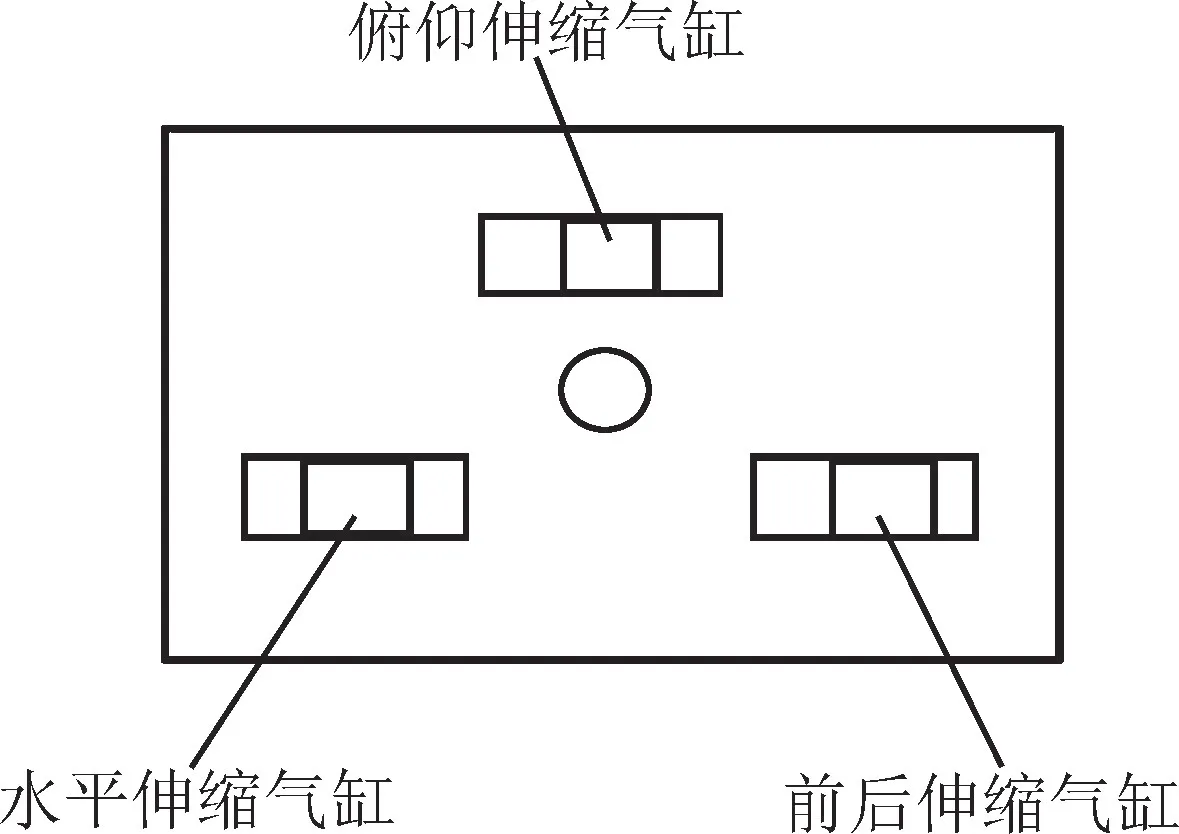
圖10 電子靶板驅動氣缸設計Fig.10 Design of cylinder driven by electronic target board
安裝在滑行燈上的激光對地測距儀測量滑行燈中心出光面相對地面的垂直高度,并將高度信號傳送給靶板控制單元;控制單元發送指令給靶板的高度升降伺服電機,使靶板執行高度調整(調整至數值為0.89倍的著陸滑行燈出光面中心出光線對地高度值)。靶板上安裝有水準儀,用于驗證靶板的水平、俯仰度。
3 基于激光測距的自動化校靶系統設計
3.1 電子靶板系統
電子靶板系統由飛機著陸滑行燈測距/校準系統(含激光筆)、靶板校準系統、激光定位系統、照度計、附件箱等組成,整體實物如圖11所示。電子靶板系統依據定位系統的激光信號、水平距離數據和燈具對地高度數據進行自我調整,使靶板平面既垂直于飛機中軸面,又垂直于水平面。靶板內置的陀螺儀使靶板具有感知水平位置的能力,本系統根據陀螺儀的反饋參數自動精確調整自身的水平度。靶板的鈑金材料設計方式,使其受環境風速和地面平整度的影響很小,適合外場燈光調校。
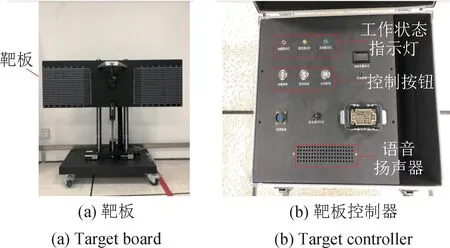
圖11 電子靶板系統實物圖Fig.11 Image of electronic target system
3.2 激光定位系統
激光定位系統由定位器、三軸激光儀、離靶板水平測距感應面組成,如圖12所示,其主要功能是將飛機中軸面通過激光坐標系統可視化,并向靶板提供光能量和距離測量點。
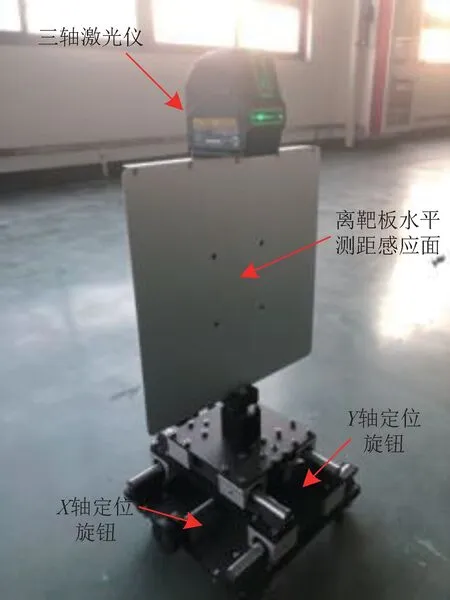
圖12 激光定位系統Fig.12 Laser positioning system
三軸激光儀射出2條十字垂直交叉的綠光線(1條垂直、1條水平)和1條豎直的紅色激光線,其中紅色激光線用于對準飛機前腹千斤頂中心位置(即飛機中軸線的起始位置),十字垂直綠色激光線用于對準飛機軸線和靶板中心垂直線。
水平測距儀安裝在離靶板水平測距感應面的靶板下方處。測距感應面作為水平測距儀射出的激光線截止面,用于測量靶板到飛機千斤頂中心點的距離。

圖13 激光測距儀Fig.13 Laser rangefinder
為便于操作人員將三軸激光儀中的向上豎直紅色激光線對準飛機前腹的千斤頂中心基準點,設計了一組微動調節平臺,可使激光儀沿X、Y方向進行微小移動,實現精確對準。
3.3 滑行燈指示系統
著陸滑行燈夾具設計如圖14所示,其主要包括對地測量儀、激光筆限位夾具、限位擋塊和鎖緊條塊等部分。對地測量儀用來測量滑行燈中心出光面距離地面的高度值,激光筆用來模擬滑行燈中心出光面,并通過激光筆限位夾具使激光筆中心點與滑行燈出光面齊平。系統整體通過著陸滑行燈背部散熱片固定,從結構設計上保證了激光指示筆的射出點距離地面的高度即為被測燈具距離地面的高度。

圖14 著陸滑化燈夾具設計圖Fig.14 Design drawing of sliding landing lamp fixture
激光筆夾具如圖15所示。激光筆安裝入夾具后,其射出的激光光線向下與水平線呈0.5°夾角,與飛機滑行燈的出光角度一致。激光筆的激光標記點在10 m外的測試靶板上與滑行燈的光斑中心處重合。
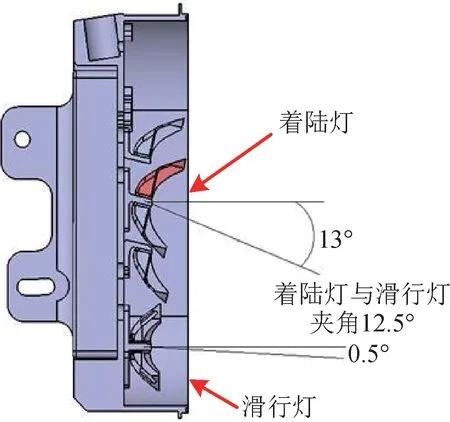
圖15 滑行燈出光角度示意圖Fig.15 Schematic diagram of the light emitting angle of the taxi light
滑行燈對地測距儀用于測量滑行燈相對地面的距離。通過機械設計及加工保證測距儀起始點與滑行燈的燈帶水平高度一致,并通過電纜將測距數據傳輸至靶板校準系統。
4 自動化校靶系統應用驗證
4.1 實驗操作簡述
基于激光測距的自動校準靶板系統由1~2人操作,定位校準時間不超過1 h,設備整體可收納為一個整體箱,便于搬運和使用。在調校過程中,將激光測距自動化校準靶板系統安裝到位后,靶板系統利用自身陀螺儀自動找平,通過配備的兩軸水平儀驗證靶板系統的X軸與Y軸的水平度。自動化校準靶板系統操作流程如下:
1)飛機中軸面對準
將激光定位系統置于飛機前腹千斤頂頂塊中心點正下方進行軸線定位,使十字光標的垂直線與飛機軸線重疊。
2)初調電子靶板
利用靶板中心定位激光傳感器將靶板置于6.732 m處,并結合滑軌處旋鈕微調的方式,將靶板的中線與三軸激光儀的垂直激光線對齊。
3)著陸滑行燈夾具安裝與調整
將著陸滑行燈夾具安裝在著陸滑行燈的散熱片上。啟動自動校準設備,開機提示開始工作并自動檢測X軸、Y軸的角度參數和高度參數H0。若X軸、Y軸的角度大于5°或H0的值不符合匹配范圍,系統會提示并停止校準,待調整好之后再啟動。
4)著陸滑行燈校準
①接收著陸滑行燈夾具對地測距儀的高度數據,然后校準靶板的高度使零刻度線位于H1(H1=H0-0.13 m)處。
②靶板根據雙軸傳感器的角度數值自行校準,使靶板面垂直于地平面,且靶板整體水平平行于地平面。
③靶板接收激光垂直光線,通過對比光照的最大值,校準靶板與飛機的中軸截面相互垂直。
4.2 實驗效果對比
分別采用傳統的燈光校靶方法和本文提出的自動化校靶方法對同一套飛機著陸滑行燈進行校靶,比較兩種方法的實際應用效果,如表1所示。

表1 傳統燈光校靶方法和自動化校靶方法效果對比Tab.1 Comparison of effects between traditional light calibration method and automatic calibration method
由表1可知,相較傳統的燈光校靶方法方法,本文提出的自動化校靶方法的校準準確度提升了80%,操作效率提升了60%,極大地降低了校準工作耗時,且不易受環境風速等因素的影響。
5 結論
針對傳統飛機著陸滑行燈校準方法測量準確度低、操作復雜、需要耗費大量人力物力的缺陷,本文研制了一套基于激光測距的自動化靶板校準系統,詳細介紹了該系統的工作原理、裝置組成、操作方法,并開展了相關實驗驗證其可行性。結果表明,相較傳統方法,使用該系統校準的準確度及操作效率均明顯提升,極大地減少了人工勞動強度。該系統可有效滿足飛機著陸類燈具校準需求,為航空燈具數字化、自動化檢測打下了良好基礎,為保障飛機著陸滑行的安全性提供了重要技術支撐。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
環球時報(2022-05-30)2022-05-30 15:16:57
美與時代·美術學刊(2022年3期)2022-04-27 01:18:15
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
當代陜西(2019年11期)2019-06-24 03:40:28
人大建設(2019年12期)2019-05-21 02:55:32
家庭影院技術(2017年9期)2017-09-26 03:41:45
作文周刊·小學一年級版(2017年9期)2017-06-20 00:19:33
小學生導刊(低年級)(2016年8期)2016-09-24 22:09:04