融合慣導(dǎo)和超寬帶技術(shù)的定位算法
2021-02-07 08:56:22廣州中海達(dá)衛(wèi)星導(dǎo)航技術(shù)股份有限公司
電子世界 2021年2期
廣州中海達(dá)衛(wèi)星導(dǎo)航技術(shù)股份有限公司 李 冀 肖 巖
鄭州聯(lián)睿電子科技有限公司 馬琳琳 袁子倫 許連杰
本文針對慣導(dǎo)行人航位推算(PDR)存在累積誤差的問題,提出了一種基于慣導(dǎo)和UWB融合的定位算法。使用慣導(dǎo)的加速度計(jì)進(jìn)行步伐檢測和計(jì)步,結(jié)合超寬帶(UWB)的飛行時(shí)間(TOF)測距信息進(jìn)行步長及方向搜索得到移動目標(biāo)的位置信息。實(shí)驗(yàn)結(jié)果表明:提出的算法提高了定位精度。
室內(nèi)定位作為導(dǎo)航定位的“最后一公里”,近年已成為研究熱點(diǎn),也是導(dǎo)航與位置服務(wù)的核心問題。目前主流的室內(nèi)定位技術(shù)包括:WIFI、藍(lán)牙、RFID、UWB、慣性導(dǎo)航、地磁等,但是,每種定位方法在其精度、魯棒性、成本、適用環(huán)境等方面各不相同。目前還沒有一種單一的定位技術(shù)能夠同時(shí)滿足定位準(zhǔn)確、實(shí)時(shí)、適應(yīng)性強(qiáng)、可靠性高和成本低的特點(diǎn)。多傳感器融合定位通過將各種獨(dú)立的定位信息進(jìn)行融合,達(dá)到信息互補(bǔ)和協(xié)同工作的效果,從而提高整個(gè)系統(tǒng)的定位性能。
目前基于UWB的定位技術(shù)由于其高精度的定位性能受到越來越多的關(guān)注,UWB定位通常最小定位單元至少需要布設(shè)三個(gè)或四個(gè)定位基站,范圍越大部署成本越高,妨礙了其更廣泛的應(yīng)用。而基于慣性導(dǎo)航的定位方式無需部署任何信標(biāo)節(jié)點(diǎn),具有全天候、低成本等特征,其中行人PDR定位方法是目前研究較多的。由于PDR定位方法只能提供相對位置信息,定位誤差會隨著時(shí)間而累積,故需要絕對位置信息對其進(jìn)行校正。
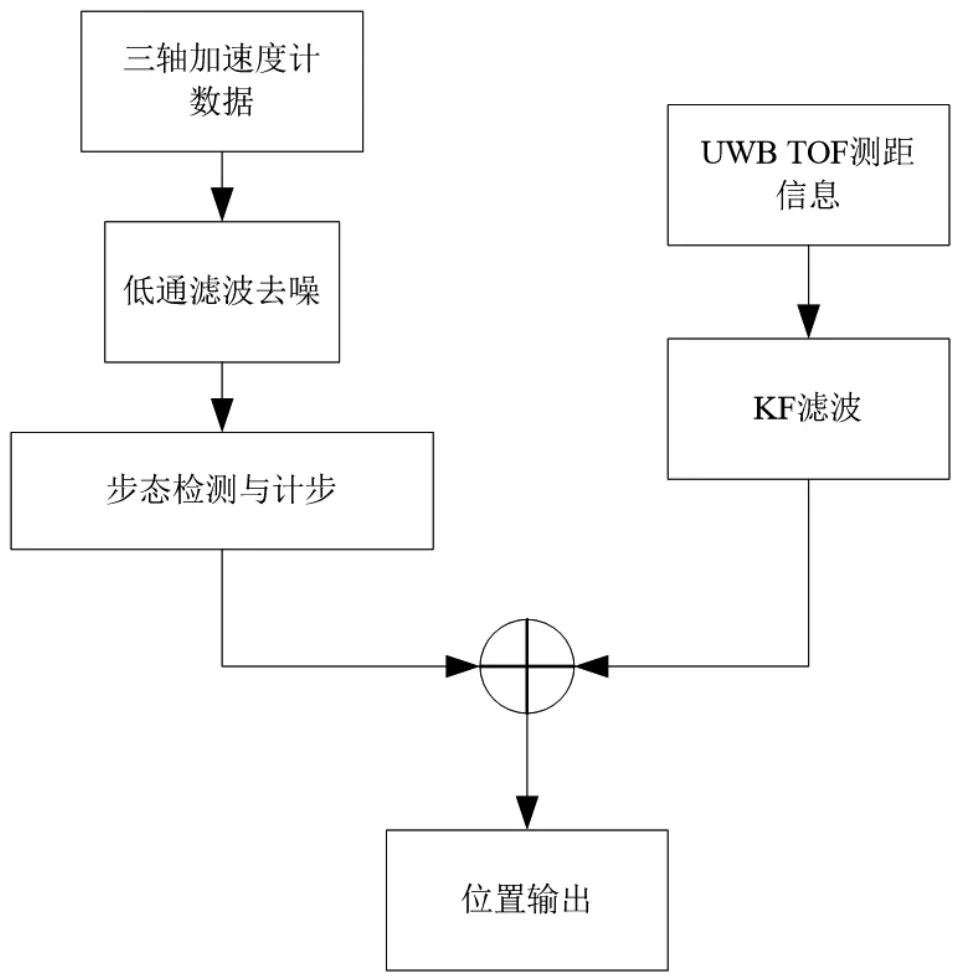
圖1 基于慣導(dǎo)和超寬帶融合的定位算法流程圖
針對上述問題,本文設(shè)計(jì)了一種基于慣導(dǎo)和超寬帶融合的定位算法,采用慣導(dǎo)的加速度計(jì)進(jìn)行步伐檢測和計(jì)步,結(jié)合超寬帶(UWB)的飛行時(shí)間(TOF)測距信息進(jìn)行步長和方向搜索,進(jìn)而得到移動目標(biāo)的位置信息,提高了室內(nèi)環(huán)境下移動目標(biāo)的定位精度,同時(shí)降低了UWB基站的部署成本。
1 基于慣導(dǎo)和超寬帶融合的定位方法
系統(tǒng)整體框架如圖1所示,結(jié)合三軸加速度數(shù)據(jù)和UWB測距信息得到行人最終的定位結(jié)果。
以東北天坐標(biāo)系為例,對行人PDR算法進(jìn)行簡要說明,行人位置更新如式(1)所示。

式(1)中,(xk,yk)為第k步時(shí)行人的位置坐標(biāo),Lk+1為第k+1步時(shí)的步長,θk+1為第k+1步時(shí)行人行進(jìn)方向相對于北向的夾角。本文的創(chuàng)新點(diǎn)在于步長及方向角的計(jì)算方法。
1.1 基于慣導(dǎo)的步伐檢測
融合定位方法中步伐檢測是最基本的前提,計(jì)步結(jié)果的好壞直接影響到算法最終的定位精度。本文對比了不同算法在不同狀態(tài)下檢步的性能,具體結(jié)果如表1所示。
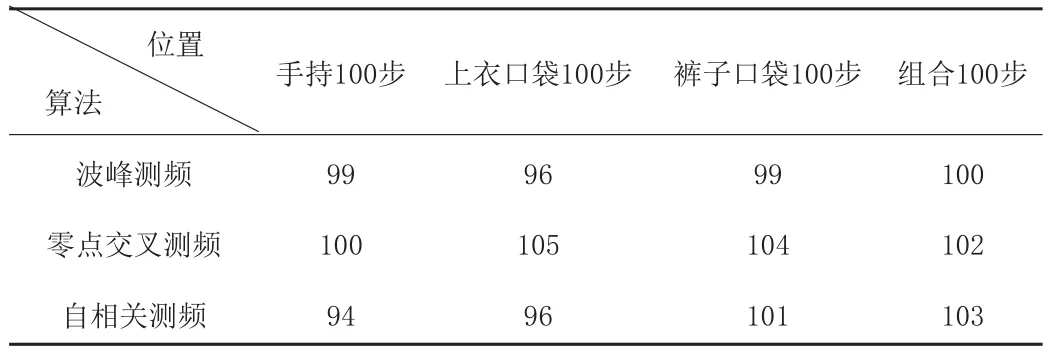
表1 不同步伐檢測結(jié)果
通過對比測試,其中波峰測頻性能略優(yōu)于其他兩種算法,而且波峰檢測方法實(shí)現(xiàn)比較容易,故本文選擇波峰測頻方法對步伐進(jìn)行檢測。
1.2 基于超寬帶的步長及方向搜索
考慮到傳統(tǒng)基于慣導(dǎo)信號的步長及方向估計(jì)容易受慣導(dǎo)攜帶姿態(tài)及振動等外界條件的影響,提出了基于超寬帶TOF測距信息的步長及方向搜索的方法,分為預(yù)測及更新兩個(gè)部分。僅以二維進(jìn)行說明。
(1)預(yù)測
考慮到行人步長的有界性及方向的隨意性,設(shè)步長的范圍為[L1,L2],方向的范圍為[-π, π],第k步時(shí)行人的位置坐標(biāo)為(xk,yk),則第k+1步可能的位置圖2中灰色部分所示。

圖2 行人第k+1步預(yù)測示意圖
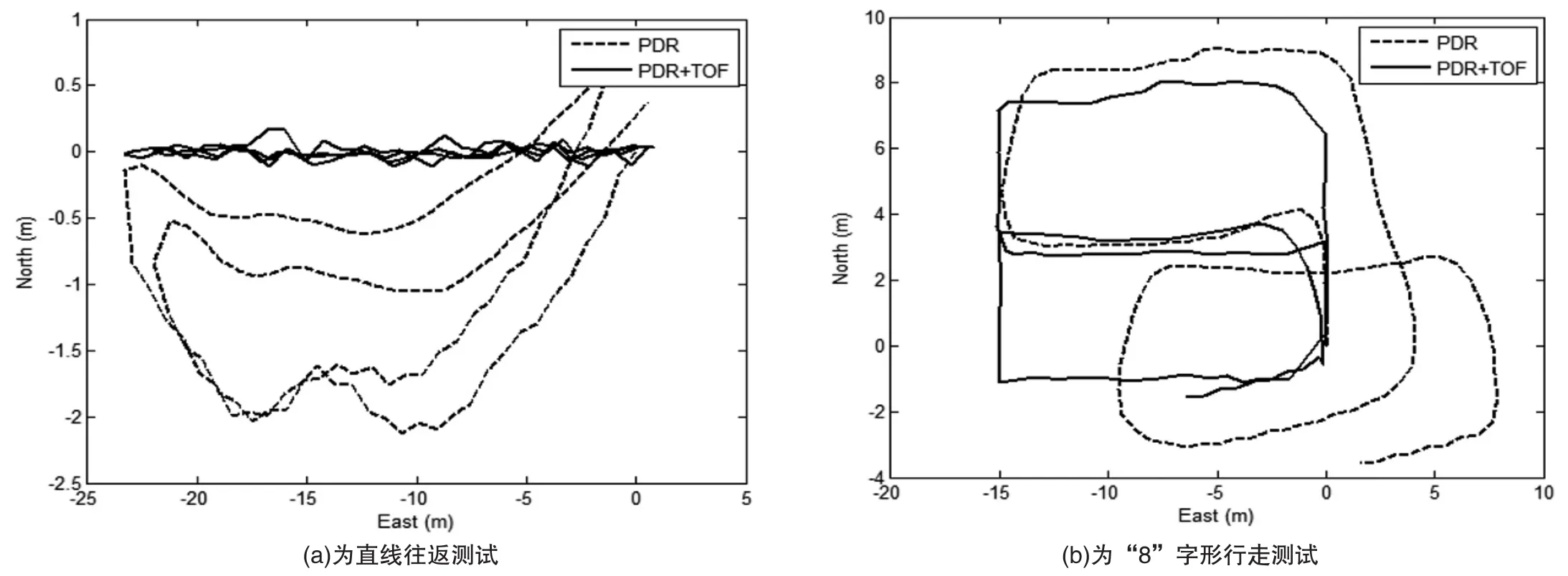
圖3 兩種方法的定位結(jié)果對比圖
(2)更新
根據(jù)超寬帶TOF測距值d與粒子集中每個(gè)粒子到超寬帶基站的距離值的差值ei,計(jì)算第k+1步粒子集中每個(gè)粒子的概率值Pi,最后選出最大值Pi對應(yīng)的位置粒子即為行人第k+1步的位置坐標(biāo)。具體的計(jì)算方法為:
其中,(xbs,ybs)為超寬帶基站的坐標(biāo)。需要注意的是,若只有一個(gè)超寬帶基站則得到的結(jié)果會存在模糊解,所以為了得到唯一的位置坐標(biāo),算法需要至少兩個(gè)超寬帶基站提供TOF測距信息來進(jìn)行模糊解剔除。
2 測試及對比分析
實(shí)驗(yàn)中采用Arduino開發(fā)板及慣導(dǎo)模塊、UWB測距模塊搭建數(shù)據(jù)采集平臺,離線采集數(shù)據(jù)后發(fā)送至PC端,通過時(shí)間信息將兩類數(shù)據(jù)進(jìn)行同步處理,然后通過Matlab軟件對測試數(shù)據(jù)進(jìn)行定位解算。測試使用基于慣導(dǎo)的PDR算法記為PDR,使用融合算法記為PDR+TOF,對于這兩種方法分別進(jìn)行了直線往返行走測試以及“8”字形行走測試,得到圖3所示的定位軌跡。
由圖3可知,PDR算法得到的定位軌跡累積誤差逐漸增大,隨著測試時(shí)間的增長,軌跡越來越偏離真實(shí)軌跡,而PDR+TOF算法能夠有效抑制這種問題,保持軌跡的準(zhǔn)確性。仿真實(shí)驗(yàn)結(jié)果表明:本文基于慣導(dǎo)和超寬帶融合的定位算法提高了行人室內(nèi)定位的精度。
結(jié)論:本文針對目前PDR算法定位性能差的問題,提出一種基于慣導(dǎo)和超寬帶融合的定位算法。仿真實(shí)驗(yàn)結(jié)果表明,使用超寬帶TOF測距值輔助慣導(dǎo)PDR解算之后,提高了定位性能。
猜你喜歡
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
今日農(nóng)業(yè)(2021年19期)2022-01-12 06:16:36
中老年保健(2021年11期)2021-08-22 03:15:44
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2021年1期)2021-03-19 08:28:38
無線電工程(2020年11期)2020-10-29 01:25:46
現(xiàn)代出版(2020年3期)2020-06-20 07:10:34
中華手工(2017年2期)2017-06-06 23:00:31
中外會展(2014年4期)2014-11-27 07:46:46
建筑創(chuàng)作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32