機載LiDAR在山區(qū)型河道地形測繪中的適用性研究
2021-02-04 06:15:54劉世振,鄧建華,馮國正,劉少聰,何友福,胥洪川
人民長江 2021年1期
關(guān)鍵詞:測繪
劉 世 振,鄧 建 華,馮 國 正,劉 少 聰,何 友 福,胥 洪 川
(1.長江水利委員會 水文局,湖北 武漢 430010; 2.中國電建集團中南勘測設(shè)計研究院有限公司,湖南 長沙 410014; 3.長江水利委員會水文局 長江上游水文水資源勘測局,重慶 400020)
河道基礎(chǔ)地理信息是水利工程開發(fā)、水資源利用與保護、水土保持與治理、水域岸線利用調(diào)查等的基礎(chǔ)資料。山區(qū)型河道地形比較復(fù)雜,采用傳統(tǒng)的全站儀、RTK地形測繪方式,存在特征點、特征線不易把握,人工走測困難,生產(chǎn)效率低下,水陸交通條件差,作業(yè)風(fēng)險大等問題[1-2];采用傳統(tǒng)航測方式,由于是人工三維立體采集,存在生產(chǎn)周期長,高程精度低,植被區(qū)域不能準確獲取地表信息等問題[3-4]。近年來機載激光技術(shù)得到迅速發(fā)展,并已成功應(yīng)用于工程地形測繪領(lǐng)域。采用機載激光測繪地形具有如下優(yōu)點:① 屬于面測繪,更有利于復(fù)雜、破碎地形測繪;② 可以同時獲取點云、影像資料,成果豐富,且可充分結(jié)合點云高程精度高、影像平面精度高的優(yōu)勢;③ 激光采用多次回波技術(shù),具有一定的植被穿透性;④ 非接觸式測量,作業(yè)風(fēng)險小;⑤ 作業(yè)效率高;⑥ 減輕作業(yè)勞動強度[5-8]。
楊衛(wèi)結(jié)合高山區(qū)水電工程項目,在有植被及農(nóng)作物覆蓋的高山峽谷區(qū)域,以實例驗證了激光航帶間不符值平面、高程中誤差分別為0.15,0.07 m;激光數(shù)據(jù)平面、高程中誤差分別為0.52,0.33 m[9]。陳小雁等介紹了點云在植被深厚地區(qū)的數(shù)據(jù)分類處理及地形圖成圖技術(shù),通過案例證實了機載激光精度優(yōu)于0.10 m,極大地減少了外業(yè)工作量,縮短了作業(yè)工期,解決了傳統(tǒng)航空攝影測量技術(shù)在植被深厚且茂密地區(qū)應(yīng)用的技術(shù)難題,使地形圖的高程精度得到了很大的提升[10]。嚴慧敏等利用無人機載LiDAR在山區(qū)獲取地表點高程數(shù)據(jù),與傳統(tǒng)GPS RTK方式采集的地表高程點進行整體精度分析,結(jié)果表明:檢查點的均方根誤差小于0.10 m,滿足山區(qū)地形圖測繪要求[11]。機載LiDAR作業(yè)精度受地形和植被覆蓋率影響,地形坡度越大、地形越破碎,精度越低;地形植被覆蓋率越高,精度越低[12]。上述研究均未對山區(qū)地形類別及植被情況進行分類精度統(tǒng)計。山區(qū)型河道具有地勢陡峭、地形破碎、有植被覆蓋等特點,為全面掌握地形坡度、植被覆蓋率對機載精度的影響,首次提出對不同地形坡度,植被覆蓋類型、覆蓋率的典型河段進行機載激光植被穿透性、精度測試,證實了機載激光技術(shù)在山區(qū)型河道地形測繪中具有較好的適用性,可為山區(qū)河道地形測繪提供參考。
1 機載LiDAR技術(shù)
機載激光雷達作為一種新型對地觀測技術(shù),具有主動性、穿透性及直接獲取三維信息等優(yōu)點,并且受天氣、地形變化、地物陰影及植被覆蓋的影響相對較小。隨著技術(shù)的發(fā)展、極簡設(shè)計的應(yīng)用及集成度的不斷提高,機載激光雷達各項指標逐漸增強,系統(tǒng)重量也大為減輕,能夠?qū)崿F(xiàn)多旋翼無人機、電動垂直起降固定翼無人機、動力三角翼等多種有人和無人平臺搭載,使用的靈活性大為增強,能夠快速提供高精度地表地理信息[8-9],能夠較好地適應(yīng)山區(qū)型河道地形觀測。
1.1 機載LiDAR系統(tǒng)組成
機載LiDAR系統(tǒng)一般由激光掃描單元、定位定姿單元、同步控制單元等集成而來,可實現(xiàn)復(fù)雜環(huán)境下山區(qū)型河道地形高精度、高效率的觀測。其中激光掃描單元通過發(fā)射激光束到達地表并返回傳感器并被其接收,通過激光信號發(fā)射到返回的時間差和激光在空氣中的傳播速度計算出地表點到傳感器的距離。同時通過同步控制單元與定位定姿單元在不同時刻按照一定的時間間隔記錄其位置和姿態(tài)數(shù)據(jù),根據(jù)激光掃描儀坐標系、IMU坐標系、物方坐標系間的轉(zhuǎn)換,實現(xiàn)對地表地理信息獲取[8]。
1.2 機載LiDAR多次回波技術(shù)
機載LiDAR發(fā)射的激光脈沖在垂直空間中遇到不同高度的障礙物會發(fā)生多次反射,只要回波信號的強度足以被接受并且回波信號間的距離滿足一定的條件,就可以被記錄并獲得該次反射所測得的距離。多次回波是由一束激光脈沖發(fā)生多次反射,并按一定時間間隔被系統(tǒng)所接收和探測,這樣就可以利用一束激光測得兩次以上的回波信息。在山區(qū)型河道地形觀測中,當(dāng)無地表覆蓋物時,機載激光雷達所發(fā)射的激光束直接打在地表,從而直接獲取地面空間信息;在建(構(gòu))筑物區(qū),激光通常會到達房屋的頂部、立面及地面,形成兩次或三次回波;在植被區(qū),激光能量就可能會分別到達樹冠、樹干和地面,形成多次回波[10]。隨著技術(shù)的不斷發(fā)展,有的機載激光LiDAR激光點測量頻率達到150萬點/s,回波型號能夠高達15次,使得獲取真實地表點成為可能。
1.3 機載LiDAR地形圖生產(chǎn)流程
利用機載LiDAR作業(yè)方式生產(chǎn)地形圖分為航攝準備、數(shù)據(jù)采集、數(shù)據(jù)處理、成果生成4個階段,具體作業(yè)流程見圖1。
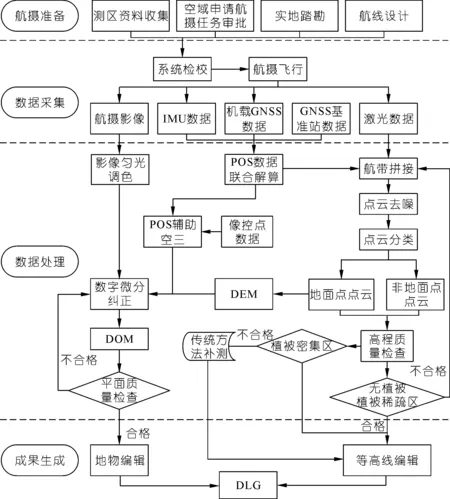
圖1 機載LiDAR生產(chǎn)地形圖流程Fig.1 Process of airborne LiDAR production topographic map
2 機載LiDAR濾波與分類算法
在機載LiDAR點云中,有的位于真實地表上,有的位于人工建筑物(房屋、塔、煙囪等)或植被(樹、草)等上。從點云數(shù)據(jù)中提取出數(shù)字地面高程模型DEM,而將其中的非地面點數(shù)據(jù)去掉,這就是所謂的點云數(shù)據(jù)濾波[6-8]。各濾波算法及主要思想如下:
(1) 數(shù)學(xué)形態(tài)學(xué)濾法。算法主要思想為:① 首先確定研究區(qū)內(nèi)最大建筑物的大小,濾波窗口的大小必須大于這個值,該窗口限定了被分析像元的鄰域;② 腐蝕,窗口中心的高程由窗口內(nèi)最小值替代;③ 膨脹,窗口中心的高程由窗口內(nèi)最大值替代。
(2) 迭代線性最小二乘內(nèi)插法。其核心思想是基于地物點的高程要比對應(yīng)區(qū)域地形表面激光腳點高程要高。首先將原始數(shù)據(jù)劃分為小塊;然后利用最小二乘法原理對塊區(qū)內(nèi)的所有數(shù)據(jù)點等權(quán)擬合出一個介于地形與地物之間的趨勢面;再用原始數(shù)據(jù)中每一點的高程與這點趨勢面的擬合高程值之差得到擬合殘差;利用擬合殘差、定權(quán)函數(shù)確定該點在下一次曲面擬合中的權(quán)重,權(quán)越大越可能為地面點。
(3) 迭代三角網(wǎng)加密算法。其基本思想是首先以局部最低點作為地面種子點生成一個不規(guī)則三角網(wǎng);然后不斷地加入候選點,利用待定點到相應(yīng)三角形節(jié)點的坡度和距離判斷這些候選點,如果是地形點則將這些待定點加入到地形表面中,豐富地形面的信息,以這種方式不斷迭代,最終生成真實數(shù)字地面模型。
(4) 移動曲面擬合算法。其基本原理是在地球表面的局部范圍內(nèi),可將地表看作一個面,該方法首先需要找3個相鄰的最低點構(gòu)建初始平面,再代入第4個點進行判斷,如果代入點被判定為地面點,則將該點保留,當(dāng)判定出的地面點達到一定個數(shù)時,可逐漸去掉初始點,用新的面作為地形的擬合面,再將新的點代入方程,比較計算結(jié)果與實際高程差,重復(fù)直到完成對研究區(qū)域中所有點的判斷。
3 適用性研究
3.1 河段選取
選取烏東德水電站龍街河段作為試驗河段,河段有高山、平地,地表覆蓋類型含樹林地、草地、耕地、建筑區(qū)、灘涂等,具有較高的代表性,測試河段情況如圖2所示。
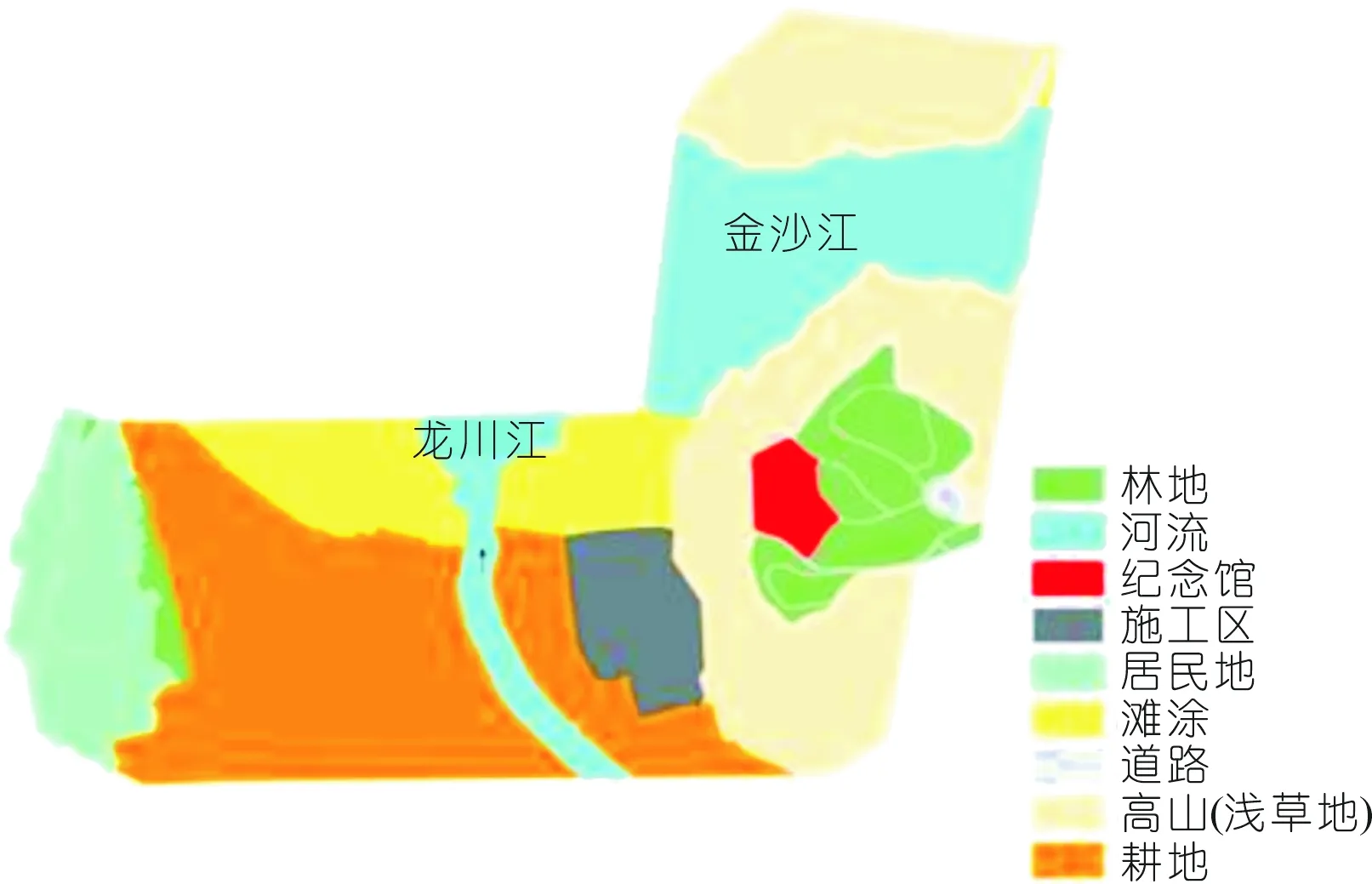
圖2 測試河段概況Fig.2 Overview of the test river section
3.2 機載LiDAR植被穿透性
由于機載LiDAR具有多次回波技術(shù),所以具備一定的植被穿透性,利用Terrasoild軟件對點云進行分類,各植被類型點云分類如圖3~5所示,圖中上半部分為測區(qū)DOM截取影像,下半部分為相應(yīng)點云分類后截取剖面圖,點云棕色即為分類后的地面點。
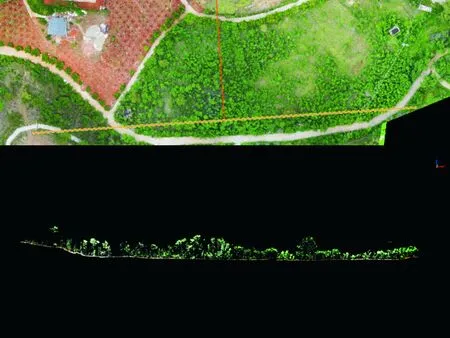
圖3 平坦樹林地點云分類Fig.3 Cloud classification of flat forest sites

圖4 山區(qū)樹林地點云分類Fig.4 Cloud classification of mountain forest sites
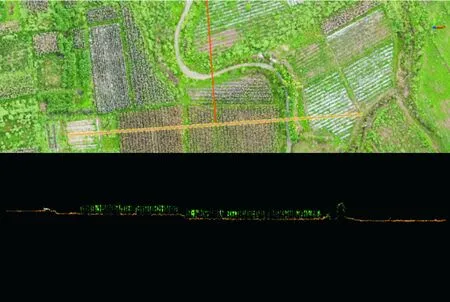
圖5 耕地點云分類Fig.5 Cloud classification of cultivated land
3.3 機載LiDAR精度統(tǒng)計
對不同地勢、地表覆蓋類型的點云精度生成地形圖、斷面成果進行統(tǒng)計。精度統(tǒng)計流程如圖6所示。
3.3.1平面精度統(tǒng)計
分別從DOM、點云中提取地物特征點,與傳統(tǒng)方法測得坐標進行精度統(tǒng)計,較差分布如圖7所示。精度統(tǒng)計列于表1。由圖7、表1可知:機載激光點云、DOM具有良好的精度,且DOM平面精度優(yōu)于點云精度。
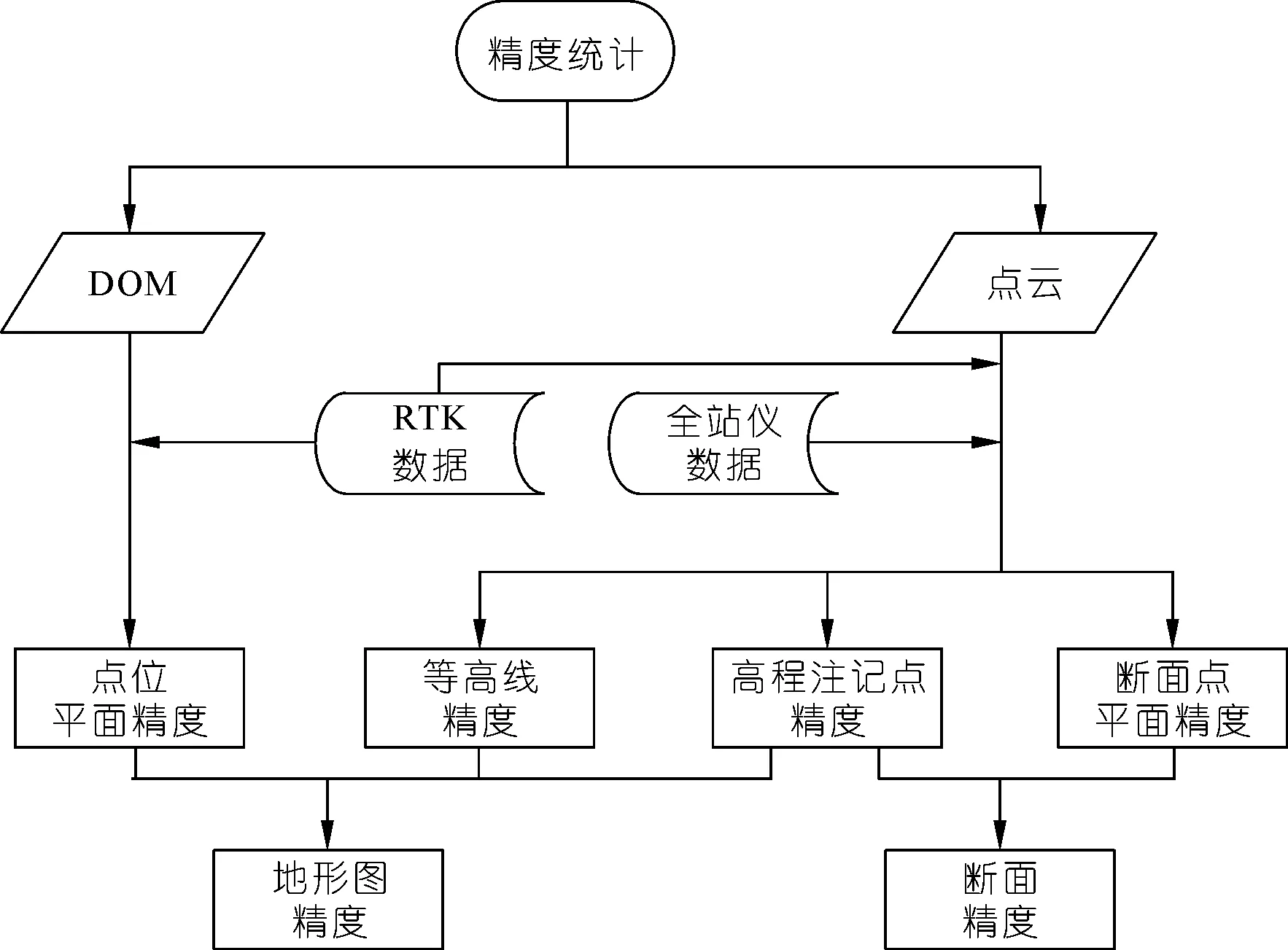
圖6 精度統(tǒng)計流程Fig.6 Accuracy statistics process
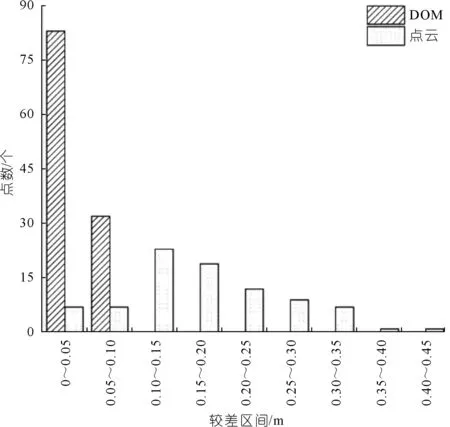
圖7 平面較差分布Fig.7 Distribution of plane difference

表1 平面精度統(tǒng)計
3.3.2點云高程精度統(tǒng)計
地形圖高程注記點從點云數(shù)據(jù)中提取,則點云高程精度即為地形圖高程注記點精度。提取RTK、全站儀測點距離最近的點云,分別對不同地形、地表覆蓋類型進行點云高程精度統(tǒng)計,較差分布如圖8所示。精度統(tǒng)計如表2所列。
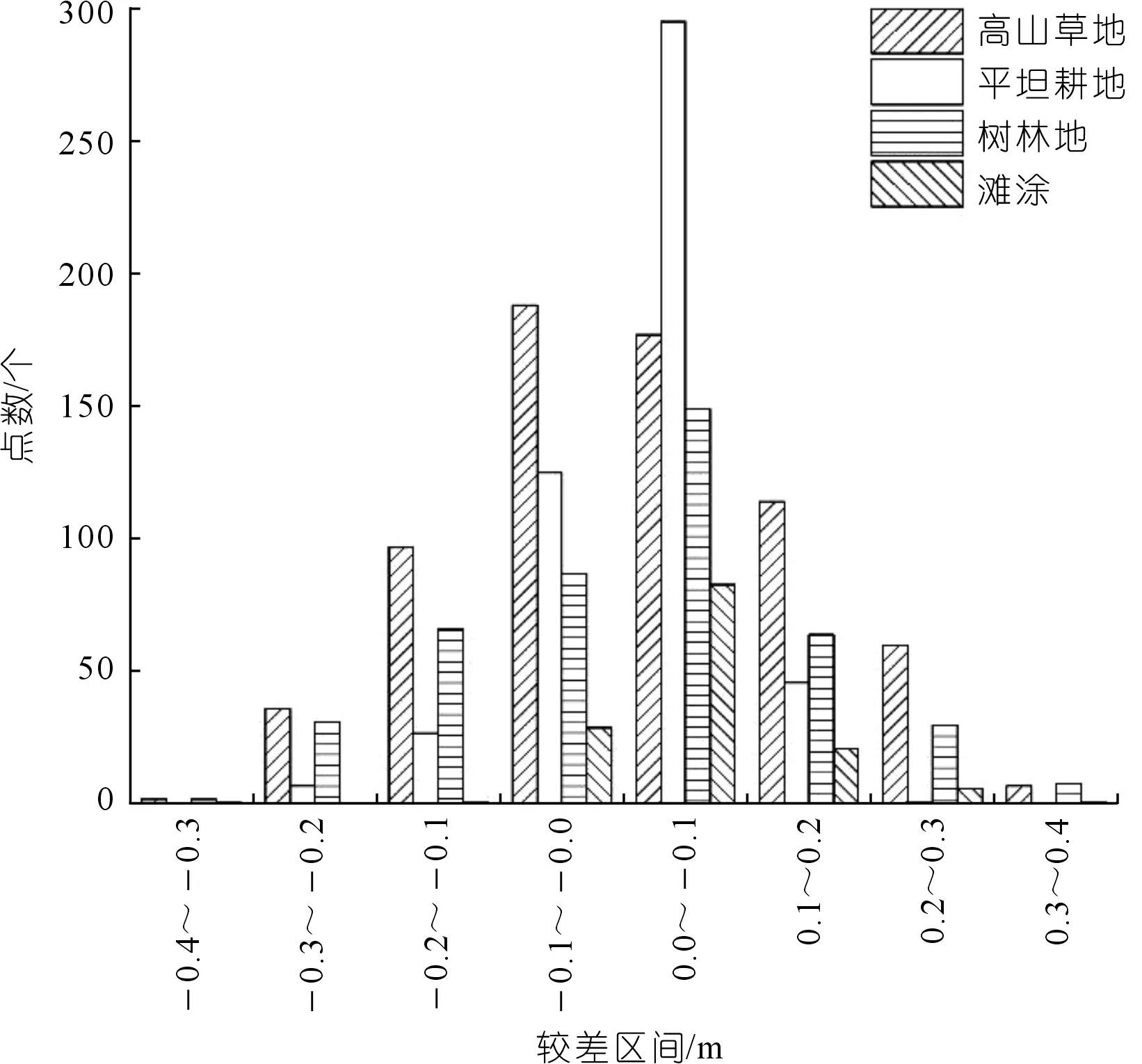
圖8 點云高程較差分布Fig.8 Distribution of point cloud elevation difference
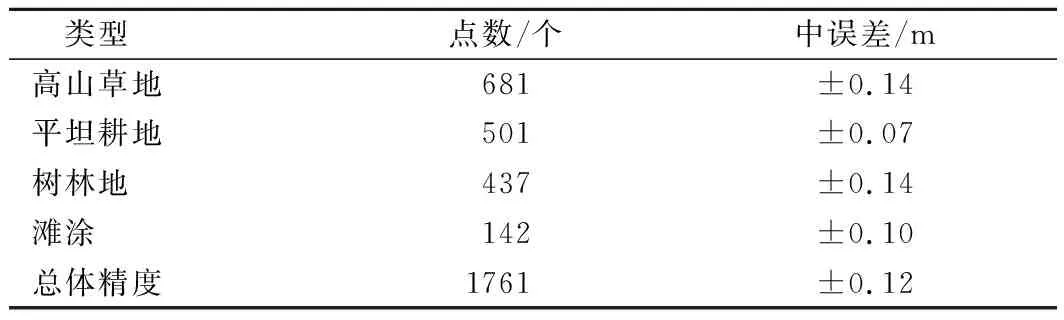
表2 點云高程精度統(tǒng)計
由圖8和表2可知:不同的地勢與地表覆蓋物,點云高程精度均優(yōu)于±0.15 m;平坦區(qū)域精度優(yōu)于山區(qū);無植被灘涂精度優(yōu)于草地、樹林地,但植被對點云精度影響較小。
3.3.3等高線精度統(tǒng)計
利用軟件實現(xiàn)基于不經(jīng)抽稀的點云生成等高線,分別對不同地形、地表覆蓋類型進行等高線點云高程點精度統(tǒng)計,較差分布如圖9所示。精度統(tǒng)計列于表3。
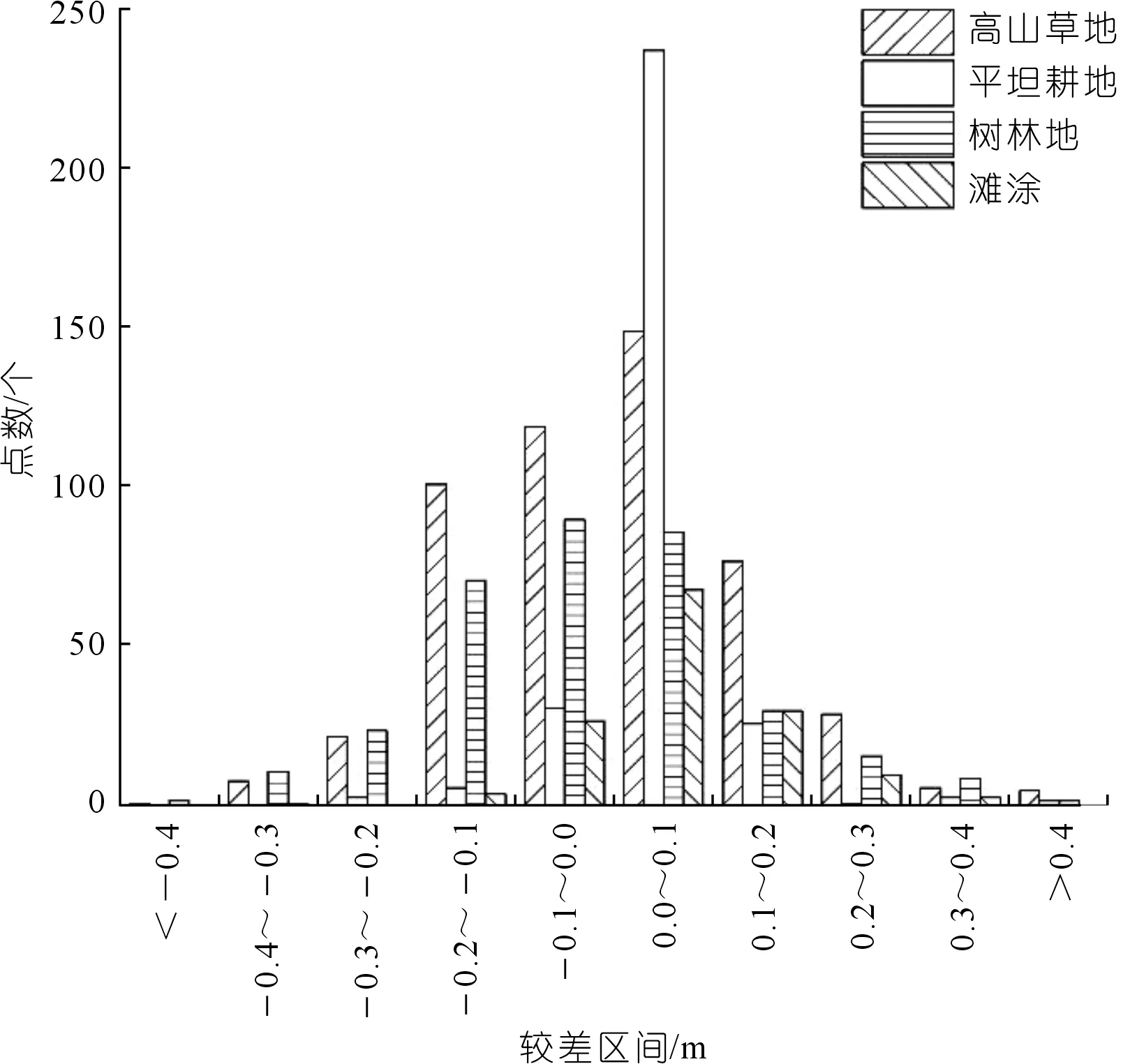
圖9 等高線較差分布Fig.9 Contour difference distribution
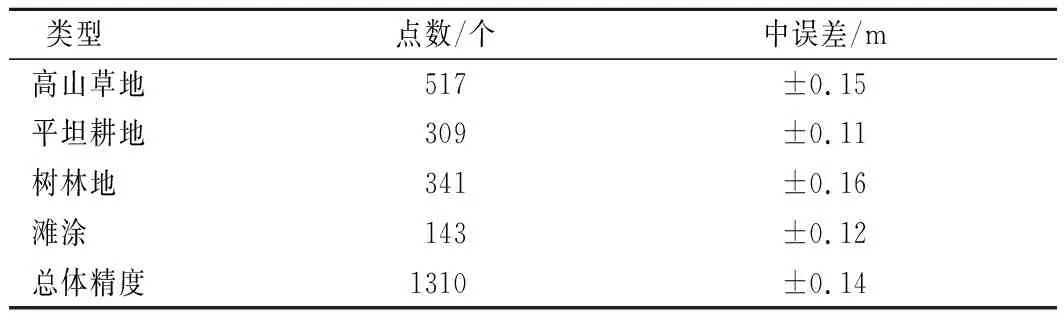
表3 點云高程精度統(tǒng)計
由圖9、表3可知:不同的地形與地表覆蓋物,等高線精度均優(yōu)于±0.20 m,等高線精度與點云高程精度差別較小;平坦區(qū)域精度優(yōu)于山區(qū);無植被灘涂精度優(yōu)于草地、樹林地。
3.3.4成果精度
根據(jù)圖7~9、表1~3分別比較的機載LiDAR成果與規(guī)范中比例尺為1∶500(山區(qū)地形圖等高距為1 m)的地形、斷面精度要求的符合性進行了統(tǒng)計,統(tǒng)計結(jié)果列于表4。由表4可知,機載LiDAR生成的地形、斷面成果滿足大比例尺精度的要求。
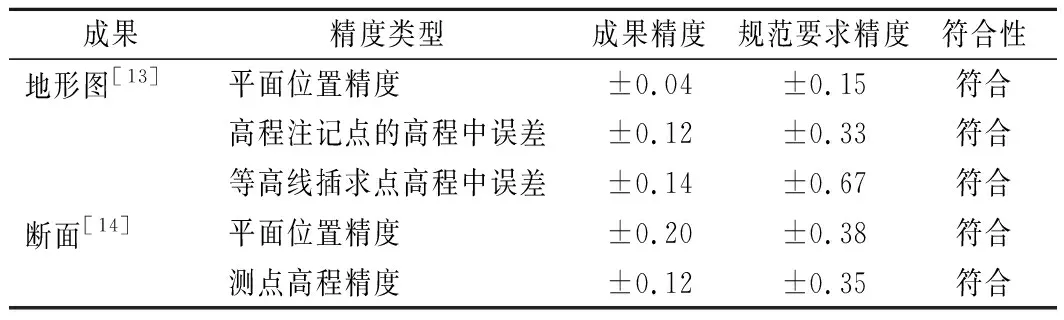
表4 機載LiDAR成果精度規(guī)范符合性統(tǒng)計
4 結(jié) 論
機載LiDAR作為一種先進的地理信息獲取手段得到了廣泛的應(yīng)用,通過選取有代表性地勢、地表覆蓋類型的試驗河段,進行機載LiDAR在山區(qū)河道地形測繪的適用性研究,得出如下結(jié)論。
(1) 機載LiDAR除獲取點云數(shù)據(jù),還可獲取影像數(shù)據(jù),且影像平面精度優(yōu)于點云平面精度,充分結(jié)合了影像平面精度高、激光點云高程精度高的優(yōu)勢,且豐富了地表信息表達方式。
(2) 機載激光具有良好的植被穿透性,根據(jù)分類點云成果可知,植被下方有大量的地面點,可獲取真實的地面信息。
(3) 點云高程精度受地形坡度、植被覆蓋密集度的影響,坡度越大精度越低,植被越密集精度越低,但受影響程度較小。
(4) 點云等高線可由不經(jīng)抽稀的點云生成,較傳統(tǒng)由碎部點內(nèi)插生成等高線方式,等高線精度得以提升,等高線精度與點云精度接近。
(5) 機載LiDAR成果精度滿足規(guī)范要求,該技術(shù)具有良好的山區(qū)型河道地形測繪適用性。
猜你喜歡
城市勘測(2023年5期)2023-11-03 01:32:36
經(jīng)緯天地(2021年5期)2021-12-27 02:32:28
浙江國土資源(2019年10期)2019-10-31 03:17:00
建材發(fā)展導(dǎo)向(2019年10期)2019-08-24 06:25:28
江西建材(2018年4期)2018-04-10 12:37:38
中國公共安全(2017年7期)2017-10-13 08:18:11
電子制作(2017年9期)2017-04-17 03:01:00
衛(wèi)星與網(wǎng)絡(luò)(2015年5期)2015-12-20 09:07:37
衛(wèi)星與網(wǎng)絡(luò)(2015年12期)2015-10-27 02:21:46
河南科技(2014年1期)2014-02-27 14:04:09