慣性+星光折射定位組合導航技術研究
2021-02-03 03:36:32胡楠希李小琥李自行
導航定位與授時 2021年1期
胡楠希,李小琥,李自行
(北京控制與電子技術研究所,北京 100038)
0 引言
由于現有慣性器件精度水平有限,純慣性導航誤差在千米級以上,因此需要采用組合導航的方式來提高導航精度。目前,全自主組合導航方式中傳統的慣性+星光定姿組合導航方法只能實現定姿,不能實現定位,在精度上可提升空間有限。
星光折射自主導航技術是一種可進一步提高自主導航精度的有效途徑[1-2]。美國對星光折射間接敏感地平自主導航的研究工作可以追溯到20世紀60年代[3-4]。近年來,國內高校和研究機構均開展了相關研究。文獻[5]對利用星光折射間接敏感地平的自主導航的基本原理進行了介紹。文獻[6-7]研究了大氣折射原理及平流層大氣變化規律。文獻[8]利用現有大氣密度模型和固定高度觀測模型,建立了自適應星光折射模型。文獻[9-16]對采用星光折射進行自主導航的方法進行了研究。
為此,提出了一種慣性+星光折射定位組合導航方法,重點從星光折射定位原理、大氣折射模型、非線性濾波和選星策略幾個方面進行論證及分析。通過理論分析與數學仿真相結合的手段,驗證了星光折射定位原理的正確性及工程可行性,從而為進一步提高自主導航精度提供了一種技術途徑。
1 慣性+星光折射定位組合導航原理
1.1 星光折射定位原理
星光折射定位導航方法是利用星光在大氣中的折射角和折射高度之間的關系而間接敏感地平,從而實現高精度定位導航。
首先,星光在穿過大氣層時會發生偏折。由于平流層(高度20~50km)大氣密度比較穩定,使得視高度ha與折射角θss的關系可以用大氣折射模型表示
ha=h0-Hln(θss)+
(1)
其次,視高度ha與觀測點位置r、折射角θss之間存在如下幾何關系
(2)
星光折射定位的幾何關系如圖1所示。
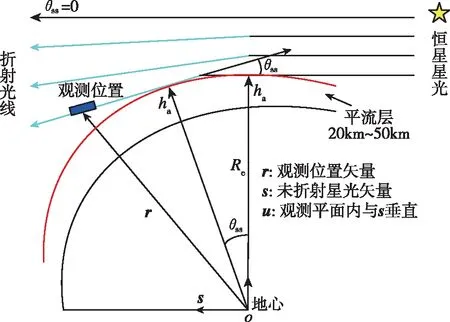
圖1 星光折射定位幾何關系圖Fig.1 Geometric illustration of stellar atmospheric refraction positioning
綜上所述,星光折射定位的基本原理如下:首先,通過星敏感器持續觀測穿過平流層的多顆不同方向折射星,測量得到折射角;其次,根據大氣折射模型與折射角計算得到視高度;最后,根據星敏感器測量得到的折射角與大氣模型計算得到的視高度,建立慣性+星光折射定位觀測方程,解算載體位置。該定位原理如圖2所示。

圖2 星光折射定位原理圖Fig.2 Illustration of stellar refraction positioning
1.2 大氣折射原理
公式給出的是簡化的大氣折射模型,是在假設大氣密度與高度是指數關系,同時大氣密度在全球均勻分布的前提下得到的。這個簡化模型可以定性地說明大氣折射的基本原理:折射角隨著視高度的降低而增大。視高度與折射角近似關系如圖3所示。
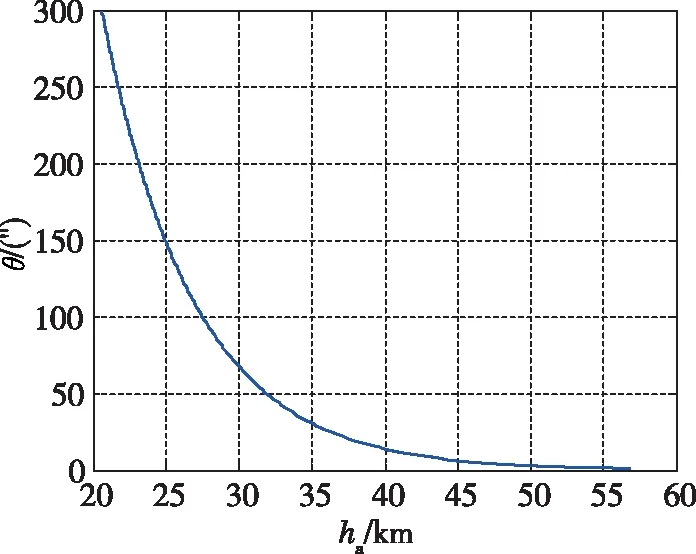
圖3 視高度與折射角關系圖Fig.3 Relationship between apparent height and refraction angle
從工程應用的角度看,簡化的大氣模型計算得到的視高度誤差較大,因此需要構建考慮大氣參數非均勻性的精確大氣折射模型。
該方法得到的視高度與觀測點位置、星光方向以及折射角有關,如式(3)所示
ha=f{Θ0,Φ0,Ψ,ni,hi|θss}
(3)
1.3 非線性濾波原理
常用的估計方法主要有兩類:最小二乘法和Kalman濾波。最小二乘法比較適合對常值參數進行估計,而Kalman濾波適合對時變系統進行估計。傳統的Kalman濾波算法需要對狀態方程與觀測方程進行線性化處理,對于線性系統有較好的適應性,但是隨著濾波周期的增大以及系統非線性的增強,濾波的非線性誤差也會增大。
無跡Kalman濾波(Unscented Kalman Filter,UKF)是一種針對非線性系統的濾波方法。對于線性系統來說,它的濾波性能與傳統Kalman濾波相當;對于非線性系統,它的性能則明顯優于傳統Kalman濾波。在慣性+星光折射定位過程中,狀態方程與觀測方程既是時變的更是非線性的,因此通過上述分析可以得出,UKF算法是最適合慣性+星光折射的定位算法。
UKF算法不需要對系統進行線性化處理,其主要思想如下,假設一個離散非線性系統
xk+1=F(xk,uk,k)+ωkzk=H(xk,uk,k)+vk
(4)

(5)
標準的UKF算法如下:
初始化
(6)
計算采樣點
(7)
狀態方程更新
(8)
量測更新

(9)
式中,Qk和Rk分別為系統和量測噪聲協方差。當xk為高斯分布時,通常選取n+τ=3。
從濾波算法中可以看到,狀態方程與觀測方程都沒有進行線性化處理,而是直接采用實際的方程進行計算。系統狀態估計誤差通過采樣點進行描述,并通過估計觀測量與實際觀測量的偏差對系統狀態估計與方差進行修正。采樣點示意圖如圖4所示。
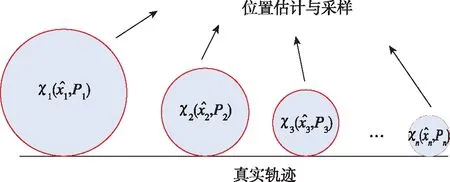
圖4 采樣點示意圖Fig.4 Illustration of sample point
圖4中,每一個圓代表每一次觀測后估計的采樣點分布,下方的橫線代表真實軌跡。采樣點的均值為每一次估計的位置,采樣點的方差為估計的方差。由于初始位置誤差較大,因此第1個圓會比較大,圓心距離真實軌跡較遠。隨著觀測次數的增大,估計的方差會減小,估計的位置誤差也會減小,因此圓會越來越小,最終收斂到真實的位置。
1.4 折射星分布原理
折射星的分布取決于觀測點與星光方向的相對關系。如圖1所示,定義地心矢量r與未折射的星光矢量s之間的夾角為α,則公式可以改寫為
ha=|r|·sin(α)+|r|·cos(α)·tan(θss)-
Re(1+θss·tan(θss)/2)
(10)
由此可知,隨著折射星視高度的增大,夾角α也在增大,可觀測的折射星與觀測點地心矢量的夾角為一個圓錐面,如圖5所示。
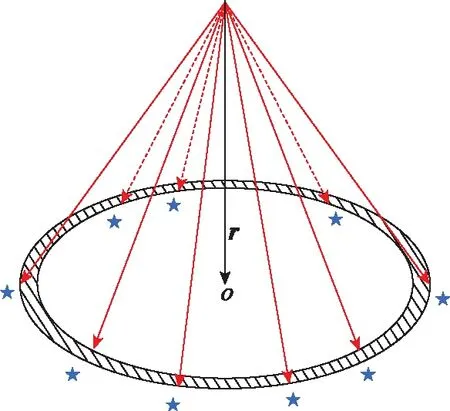
圖5 折射星分布示意圖Fig.5 Distribution of refraction star
根據上述分析可知:在觀測點移動過程中,持續觀測同一顆折射星,地心矢量與星光矢量之間的夾角是在變化的,所觀測到的折射角與視高度也是連續變化的。
2 慣性+星光折射定位組合導航的應用
2.1 基于非線性濾波的慣性+星光折射定位方法
為了將UKF算法應用于慣性+星光折射定位,需要對濾波方程進行細化,主要包括狀態方程與觀測方程。
濾波方程中使用的觀測量為視高度,而直接的觀測量是折射角,因此需要將折射角轉化為視高度。通過采樣點可以估計出相應的視高度估計值,這里需要用到視高度與位置的幾何關系方程,該方程就是觀測方程

(11)
通過直接觀測量折射角還可以計算得到真實的視高度觀測值,這里需要用到大氣折射模型
ha=f{Θ0,Φ0,Ψ,ni,hi|θss}
(12)
基于方程的視高度估計值與視高度觀測值之間的偏差對位置速度進行修正。從濾波開始,每一個濾波周期都進行狀態方程的計算。當進行星光觀測時,則進行量測的更新與狀態的修正;當沒有觀測時,則只進行狀態方程的計算。
濾波方程中,初始的位置取慣性導航的位置,初始的位置方差應設置為慣導誤差的方差,量測噪聲應選取折射角觀測偏差引起的視高度偏差的方差。
濾波過程的示意圖如圖6所示。
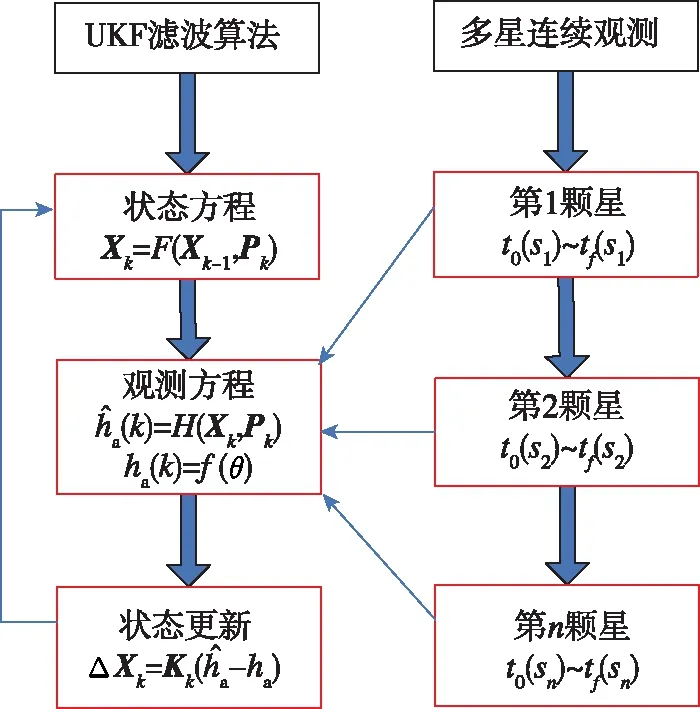
圖6 濾波過程示意圖Fig.6 Illustration of filtering
2.2 折射星選星策略
折射星選星策略應包括2個部分:1)備選星的篩選;2)折射星的選擇策略。
由于星庫中的星較多,但是可用的折射星只是一小部分。另外,根據1.4節的分析可知,折射星的觀測不僅需要關注觀測的是哪一顆星,更要關注在什么時間去觀測。因此,需要根據觀測段的位置將所有可用的折射星篩選出來作為折射星備選星庫,以便從中選擇可用的折射星。
在已知折射星備選星庫后,折射星的選擇應該服從如下原則:1)選擇不少于3顆星;2)所選星在方位上盡量分布均勻;3)前后2顆折射星的觀測時刻間隔應該考慮調姿時間與連續觀測時間。
3 數學仿真
在考慮了大氣折射模型后,星光折射定位的算法流程如圖7所示。
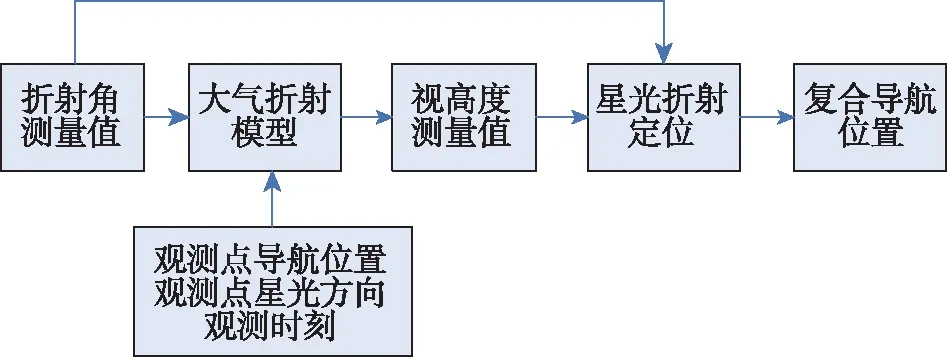
圖7 慣性+天文組合導航工作流程圖Fig.7 Workflow of inertial/stellar integrated navigation
大氣折射模型根據輸入的輔助數據與折射角測量值計算出該時刻的視高度,組合導航根據大氣折射模型計算的視高度與星敏感器觀測到的折射角進行星光折射定位。按照上述流程進行蒙特卡羅仿真。
仿真后統計的位置估計誤差如表1所示。

表1 位置估計誤差統計(3σ)
從仿真結果可以得出,基于非線性濾波的定位方法可以有效地消除觀測誤差并得到較高的位置估計精度,證明了慣性+星光折射定位算法合理有效。
4 結論
本文提出了一種慣性+星光折射定位組合導航方法,重點從星光折射定位原理、大氣折射模型、非線性濾波和選星策略幾個方面進行論證及分析。通過理論分析與數學仿真相結合的手段,驗證了星光折射定位原理的正確性及工程可行性。采用該方法可以提高組合導航精度,從而為進一步提高自主導航精度提供了一種技術途徑。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
軍事文摘(2023年10期)2023-06-09 09:15:06
空間科學學報(2021年4期)2021-08-30 08:31:18
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
河北書畫研究(2016年2期)2016-08-24 02:14:50
新農業(2016年18期)2016-08-16 03:28:27
核科學與工程(2015年4期)2015-09-26 11:59:03
世界知識畫報·藝術視界(2010年9期)2010-12-31 00:00:00