基于PLC 的自動洗車控制系統設計
2021-01-31 11:15:14
科海故事博覽 2020年9期
(湖北省十堰市竹溪縣中峰鎮人民政府,湖北 十堰 442312)
本設計利用計時器裝置,運用了PLC 的控制原理,經過對線路的通斷操作完成自動洗車。目前的汽車服務市場中,人工洗車方式需要一段很長的時間來清洗,勞動成本過高,有著違背可持續發展原則的浪費資源現象。因此,利用PLC 的可依賴性,完成人工洗車的替代功能,并且減少水、電等資源的浪費,大幅提升洗車的效率。張勇在2019 年的論文中這樣說到:可編程控制作為一種科學技術在不斷的發展,具有可靠性高,抗干擾能力強,對現場的適應性很好,能夠適應各種惡劣的工業環境等優點。近年來,基于全自動洗車機不斷受到人們的喜愛,全自動洗車機不僅能夠節省洗車的時間、減少洗車的人力物力,降低成本,同時也能夠避免工作人員與車輛進行過多的接觸,減少對車輛的損壞。
世界經濟水平在快速發展中,隨著時代的飛快進步,GPS 導航技術、空間技術、汽車技術以及各種制造業自動化控制技術都在迅速的進步著。尤其是人們的生活質量不斷地上升,小型汽車慢慢地變成為每一個家庭的重要交通代步工具,越來越多的家庭擁有他們自己的汽車,然后他們面對的問題就是,如何在汽車弄臟之后選擇汽車清洗方式,大多數國內的汽車清洗行業仍然處于人工清洗的階段,幾乎所有的洗車步驟都是由人工手工操作,耗費時間、耗費人力、耗費大量的水資源等等,只有極少數的一些有經濟實力的公司會投資引進國外的洗車設備來發展壯大自己的公司。但是在國外,大多數發達國家都早早地采用了一體化自動洗車裝置。在美國,很多洗車商店都有著全自動洗車裝置,從需要洗車的顧客付款開始到洗車過程結束,這當中所有的過程都是自動進行,只會有少量的員工,他們只是會指揮你開停車的正確位置,頂多會幫你按下開始洗車按鈕,開始噴淋清洗汽車。[1]
整個洗車場地非常的大,大約有3、4 個籃球場那么大,洗車線大約有50、60 米長,4、5 米寬,其余位置都是吸塵的地方。洗車時,掛在空擋處,拉好手剎,關上車門和車窗,人們甚至坐在車子里面不需要出來,坐在車里,車上的皮帶自動前進,會有一個高壓水槍自動噴洗。洗車卡自動支付,有很多檔次——普通的清洗、打蠟、里里外外無死角的清洗,三個檔次之間的價格差別不大,在10 美元以內。目前,中國也有很多地方引進了國外的自助洗車機,但中國的人工成本遠低于美國,場地條件也存在不成熟的缺點,所以還沒有普及。
早在2011 年,邵鴻翔與徐曉輝兩個人就設計出了一款基于PLC 的自助洗車房設計,他們的設計放在現在來看也不為過時,這個設計使用了西門子S7-300 PLC 作為中央處理器,擁有完整的洗車步驟,無論是頂部滾刷,還是噴淋結構,都一應俱全,他們設計的系統中,刷子運用了平衡系統,能夠很好地適應不同車子的車身結構。由PLC 控制頂部滾刷的往復運動和整個車身的噴淋,達到全自動洗車的目的。下圖1 是他們設計的系統部分結構圖。
1 基于PLC 的自動洗車控制系統總體方案
1.1 自動洗車流程介紹
當人們下達開始洗車的命令(按下開始按鈕),系統就可以開始檢測車輛處于哪個位置,當存在于清洗位置的傳感器檢測到汽車,它就可以發出一個信息脈沖給PLC,然后整個系統開始清潔進程,通過PLC 自動控制操作,自動進行刷洗和清潔劑的噴灑以及風干干燥等工作,當系統的傳感器感知到汽車已經開出了清洗位置,系統就會自動停止清洗工作,然后由人工手動復位,等候下一個洗車檢測器來檢測汽車,洗車機接觸器、傳感器停止工作,所有水閥關閉以及刷子停止刷洗,送出停止命令,刷洗工作停止。
1.2 自動洗車控制系統的設計要求
手動啟動后,要求系統能夠自動地檢測車輛是否已經達到了清洗位置。假設車輛沒有達到指定的清洗位置,后續的洗車工作系統將無法進行,而是處于等待狀態。如果傳感器檢測到汽車早早的抵達了清洗場地,那么就可以進行后面的一系列動作,包括刷子的左右移動、刷洗操作、清洗劑噴灑、風干等。在完成最后一步之前,整個系統都是人為可以操作的,并且需要人工手動復位。
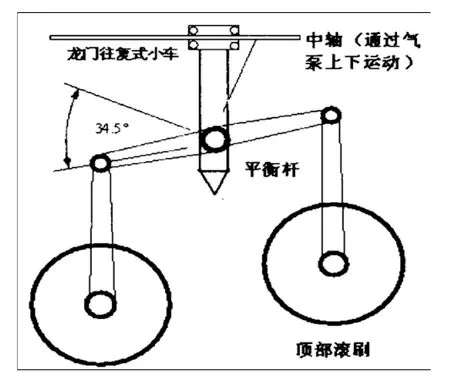
圖1 頂部滾刷系統
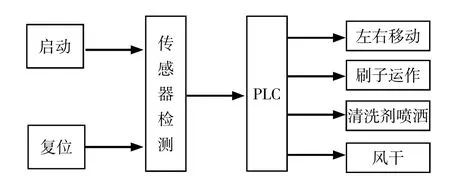
圖2 自動洗車示意圖
1.3 自動洗車控制系統的總體設計
開始洗車的時候,系統會通過傳感器判斷車子是不是停在了指定位置,如果是在指定位置,則系統啟動,并且啟動燈亮起,開始洗車,如若沒有到達指定位置,則由人工復位,這時復位燈亮起,直到車子停到指定洗車位置,再開始洗車運作。當開始洗車后,進行噴水,車子右移,直到碰到右極限開關,這時車子開始左移,在此期間,刷子進行每一次5 秒的刷子運作,當車子碰到左極限開關,開始噴灑清洗劑,此時汽車往右運動,直到碰到右極限開關,開始噴水,并且向左運動,在碰到左極限開關后,風干系統開始工作,鼓風機開始吹風,將車子身上的水吹干,整個洗車流程結束,啟動燈熄滅,結束洗車。
汽車清洗機的關鍵運動行進方向是左右往復運動,左右往復運動這里使用了兩個行程開關——左行程開關和右行程開關來控制,同時不同的反復往返順序還帶有著其他的不同動作,比如刷子洗刷工作、噴淋清洗劑的工作、往車子身上噴水的工作、用吹風機將車子烘干的工作等。這個系統還使用了可復位的設計。如果在洗車過程中,因為某些人為原因,汽車并沒有達到指定的清洗位置,那么這個時候就需要手動復位。當復位燈亮時,汽車到達指定位置,人工按下開始按鈕可以重新開始清洗工作。
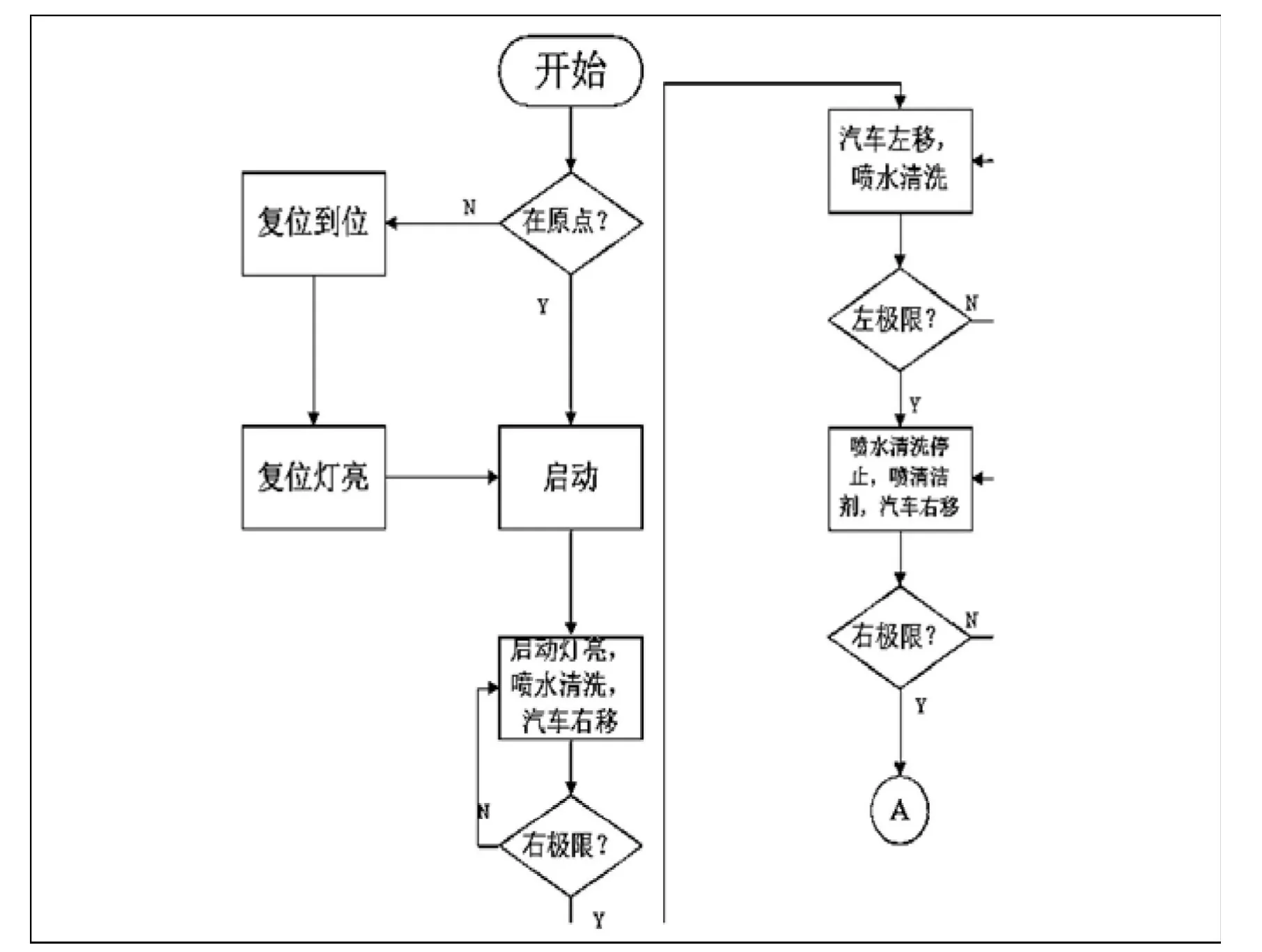
圖3 系統工作流程圖
汽車清洗機第一時間到達右限位動作和刷子刷洗動作時,接觸到右限位開關使得右限位開關完成運作,并且控制汽車清洗機向左方向運動,噴水的動作以及對車身的刷洗動作持續進行,一直等到左限位開關運作結束。在汽車清洗機第二次做向右移動的動作時,對汽車車身的噴水停止,刷子這個時候開始運行,與此同時,噴灑清洗劑的工作會一直進行到接觸到右限位的行程開關運作時停止。汽車清洗機繼續保持向左移動,與此同時持續地噴灑清洗劑,直到接觸到到左限位開關,并使其運作。而在第三次汽車清洗機右移時,汽車清洗機運作挪到到正確的位置,并且停止3 s,刷子這個時候會仔細擦洗5 s,而且繼續進行連續的右移,直到遇見限位開關。其中,想要達到汽車清洗機右移和刷子刷洗運轉動作的切換,可以運用延遲計時器T38和T37 構成的振蕩電路對其達到管控的目的,等到滿足要求后的限位開關聯鎖操控電路斷開,停掉清洗工作。此時汽車清洗機向左運動,與最后右移時的運作相同,直到接觸到左限位行程開關。在汽車清洗機第四次向右移動運作時,噴水的動作和刷子刷洗的動作持續進行,直到接觸到右限位行程開關。繼而汽車清洗機進行向左的移動,一直持續地噴水,直到接觸到左限位行程開關。汽車清洗機向右第五次移動運作狀態,這個時候,風扇正好開始移動,直到接觸到右邊的限位行程開關,汽車清洗機此時會向左移動,而風扇繼續移動。汽車清洗機持續向左移動,直到接觸到左限位行程開關。此時,控制系統就可以自動讓整個系統停止運轉,此時就可以完成洗車任務。
2 自動洗車控制系統硬件設計
自動洗車控制系統的硬件設計和應用選型應該仔細并且慎重的考慮。自動洗車機的選型、電動機的選取、傳感器的選擇和PLC 類型的選擇,都應該逐個考慮,以達到確保它們的組合在一起可以穩定并且連續的運行的目的。
2.1 自動洗車控制系統硬件架構
機架運作的結構、小側刷清洗部分、頂側刷子的清洗部分、大側刷子的清洗部分、風干吹干部分和清洗液系統組成了汽車清洗機的骨干部分。
機架方面,這里使用了兩臺三相異步電動機作為一個能源起源。經過控制三相異步電機的正轉和反轉兩種轉動方式,讓整個機體可以正確的向前或者向后移動。與此同時,想要獲得保證軌道上運作系統的安然的目標,我在軌道的兩端設置了兩個行程開關,用這兩個行程開關來控制整個車架的運行范圍。機架運轉電動機的管制,由手動操作的前行按鈕和手動操縱的倒退按鈕進行控制。兩個電機上面的接觸器由兩個行程開關來操控。
一個定位機構和轉動刷洗機構組成小側刷清洗機構。由兩個交流三相異步電動機來驅動刷子的運作。小側刷的定位機構則是使用了兩個雙作用氣缸作為驅動部分,并且經過控制電磁閥對小側刷進行定位。
轉動刷子機構和定位機構兩個部分一起組成了清洗系統的頂刷刷子結構。在這里,我使用了三相異步交流電動機來帶動刷子的工作。頂部刷子的定位機構則以氣缸為驅動源,這里采用控制電磁閥來達到使其工作得目的。而且,因為頂部刷子的區域會干涉到機架的工作情況,所以這里為了讓整個系統能夠平穩地工作,讓系統具有令人滿意的安全性能,在頂刷上設計并安裝了就地定位靠近開關,用來確定頂刷能否抵到指定區域。
使用了大側刷定位機構和刷子旋轉機構的是大刷子部分。由兩個異步交流三相電動機作為驅動來源,用電機來帶動刷子運作。并且兩個交流接觸器的正反轉用刷子的旋轉來替代控制,大邊刷子復位的同時,中間位置和的前方和后方的位置辨認、位置感知使用了四個接觸開關和兩個行程開關完成,兩個電動機當做大側刷子定位機構的動力來源,電機通過控制電磁閥的狀態。
風干系統,風干系統是由風道操作機構和吹風機兩個系統組成。一些管道和兩個出風機構成鼓風機系統。通過控制兩個接觸器來控制開關系統。同樣,電機控制電磁閥作為驅動源來實現其工作動作,但由于風干系統一直處于移動狀態,位置不夠穩定,一旦與伸出車外的肢體部分發生接觸,很容易讓人受到傷害。因為這個,設計吹風機定位光電開關和導管定位保險方法開關,用來取得整個位置辨認的準確性。由水泵、潛水泵和裝有各種清洗劑的控制閥組成的沖洗管路裝置。采用兩個交流接觸器控制水泵和潛水泵的運行,電磁閥實現控制管道的開關。
總之,需要整個系統中的各種機構和電磁閥之間的協調與配合運作,才能讓這一整個汽車清洗機的整個運行過程順利進行,要是像這樣子,才能夠保證汽車清洗機的平安運行而取得安全高效清洗子的目的。
2.2 控制系統的硬件設計
整個系統的硬件部分,這里選擇了Siemens 公司的Step7 micro/win 仿真軟件和S7-200 PLC 編程軟件。傳感器選擇了對射式光電傳感器,電機部分則選擇異步三相電動機。
2.2.1 PLC
PLC 是一種被設計來用于工業的東西,可以被用于各種各樣的由數字操作的精密電子系統之中,可以將它用于存儲各種程序、計數和算術操作、執行各樣邏輯算法、控制順序、定時等,這些都采用了一種可編程存儲器。PLC 的英文名全稱是Programmable Logic Controller。也被稱作可編程邏輯控制器,而我們通常只叫它的簡稱——PLC[2],現代工業控制的核心就是控制模擬或者數字的輸出/輸入量以此來達到控制每個方面的生產和機械方面。
張淼,王永東主編的西門子S7-200 PLC 應用技術里面提到:PLC 是二十世紀六十年代以來發展速度非常快、應用方面十分廣泛的工業控制裝置,而且它也被稱作為現代現代工業自動化的三大支柱之首。在這本書里,他們詳細的介紹了各種常用PLC 的型號以及外形,非常適合我們去了解和學習PLC[3]。
PLC 技術還在加入了模擬卷的處理以及運動控制等強大的功能,這都是建立在交換卷處理的基石上實現的。現如今的PLC 已經是在運動控制領域和過程控制等領域發揮著非常至關重要的作用,而不再僅僅局限于以往的那種邏輯控制。PLC 控制器操作時,首先將接收到的掃描字段和各個輸入設備的狀態以數據的形式存儲在I/O 圖像區,并從用戶程序內存中讀取用戶程序,以便說明應適用的算術指令,或邏輯操作到I/O 圖像區或數據寄存器的結果。所有用戶程序被執行,I/O 圖像區域或輸出寄存器中的數據的輸出狀態最終被傳送到相應的輸出設備,并且循環繼續,直到其停止。并且,人們想要PLC 的可依賴性能變得更佳,近些年來,一些大型的PLC 使用了好幾個CPU 的工作方式,有兩個的、三個的甚至更多。正因為這些措施,即便是其中的某一個CPU 出現故障,整個系統仍然有效。PLC 控制器的控制中心是中央處理單元(CPU)。接收和存儲用戶程序和數據:檢查電源、I/O 點、內存、警報計時器狀態,并診斷用戶程序語法錯誤。這些都是由PLC 控制器系統編程[4]。
文曉在她的《探討:PLC,未來之變》中曾講過,在經過了50 多年的持續發展之后,PLC 跟五十年前相比,已經發生了天翻地覆的變化,在PLC 誕生的初期,它主要是用于替代傳統的繼電器硬接線邏輯電路,而隨著相關技術的發展,PLC 在性能、功能、易用性和產品形態等方面已歷經幾代變革[5],已經發展成為具有運動控制功能、過程控制功能的通用控制器[6]。從簡單到復雜的各種自動化控制系統,PLC 的應用幾乎涵蓋了自動檢測相關的所有領域,應用非常廣泛。自動控制的工業領域與民用領域,涵蓋的有機械、建筑等各個方面[7]。CPU 模塊、接口模塊以及編寫程序器、信息來往電纜、存儲裝置、讀寫裝置、文字顯示裝置等組成了S7-200PLC 系統。
S7-200PLC 包含了基本的輸出/輸入板塊、中央處理器板塊以及電力來源版塊。擴展模塊可連接數字輸出/輸入模塊、模擬輸出/輸入模塊、信息模塊和特殊功能模塊。PLC的工作原理是周期性掃描的循環往復過程,其中PLC 的運行始終處于順序掃描循環的過程中。S7-200 系列PLC 基本搭建模塊及主機,包括PLC 編程設備、人機交互界面,并根據實際需要增加或減少人的擴展模塊,因此,S7-200 系列PLC 也是可以獨立運行的,而且可以在輸出/輸入兩個端口進行擴展,還可以進行連接功能擴展。
為我們熟知的可編程序控制器(PLC)就是集計算機技術、自動控制技術和通信技術于一體的新型常用的自動控制裝置。它具有非常強的功能性、可依賴性能極高、使用起來靈活方便、并且易于編程以及適應工業環境應用的功能強大等一系列的優點。PLC 無論是在開關控制和模擬控制中,還是在定位控制中,或者是在網絡控制中,都表現出了非常優越的特點[8]。相關的行業有了很大的進步和提升,很大程度上都是因為PLC 在眾多企業中被用在各種需要自動控制的場景之中,一定程度上也使得社會向前進步和經濟水平向上發展。PLC 是一種計算機控制技術和通信技術,作為它數字操作控制器之一,它給我們自動化控制領域帶來了很大的方便而且還極大地提高了企業的工作效率。
張磊在2016 年的基于PLC 自動控制的概述中是這樣介紹PLC 的——PLC 從原理上說,可編程控制器和計算機是一致的,為了和工業控制相適應,PLC 采用掃描原理來工作。用掃描原理來工作的原因是因為PLC 是由繼電器控制發展而來的,而CPU 掃描用戶程序的時間遠遠短于繼電器的動作時間,僅僅使用循環掃描的方法就可以解決其中的矛盾。循環掃描的工作方式是PLC 區別于普通的計算機控制系統的一個重要方面[9]。
用PLC 進行自動化電氣控制的優點:
(1)應用起來簡便,有較強的實用性;(2)后期的維護及改造相比較來說,較為方便;(3)還擁有較強的抗干擾性能;(4)造型適應目前各種各樣的工業化要求。
S7-200 系列具備十分明顯的性價比,被運用于各行各業、各種場合的自動化設備的檢測、監控和控制的S7-200是一款小型可編程控制器。同時,它也具有非常強大的功能,S7-200 系列無論是獨立的運作或者是連接的網絡都使它有可能實現復雜的控制功能。
S7-200 系列的優點有這么幾點:它的指令集各種各樣;它可以讓人們無條件地相信它;而且對人們來說容易掌握;操作簡單;擴展模塊多;實時性好;具有良好的通信能力。
S7-200 系列的適用范圍廣泛,能應用于簡單的繼電器控制,也能夠運用在復雜的自動控制行業領域,它的功能在自動化控制領域發揮的淋漓盡致。無論是民用電力裝置,環保裝置還是標準更為嚴格的工業控制領域,比如數控機械等,都能夠完美勝任,所以它是一種很值得信賴的產品。
中央處理器的單元選擇是不一樣的,每一個CPU 型號的輸出和輸入接口都不相同,比如221,它有6輸入和4輸出,而222 則輸入和輸出分別比221 多兩個,以此類推,224 的比222 輸入和輸出分別多兩個。
S7-200 可作為負載電源使用,也可直接連接致動器和傳感器,CPU221、222 具有180 毫安輸出,224、224XP、226 分別輸出280、400 毫安。
CPU224有24 個I/O,分別有14 個輸入點和10 個輸出點,168 個數字I/O 或者35 個模擬I/O 是它的極限連接數量,而且拓展板塊可以接7 個。224 有著六個三萬赫茲的高速計數器,也有13K kb 的數據存儲容量,兩個高達兩萬赫茲的高速脈沖輸出和一個比例、積分、微分控制器,224 有著RS-485 通信口,可以進行自由的通信、PPI 通信和MPI 通信。這個PLC 控制器的體積足夠小,但是控制能力很強大。
2.2.2 I/O 分析以及分配
根據系統組成分析,有6 個開關量輸出點,14 個輸入點,1 個模擬量輸入輸出點。
自動洗車機的控制系統本文中所描述使用輸出信號9個,向右洗車機操作Q0.0,Q0.1 是風扇運行的操作,刷子運行的操作為Q0.2,Q0.3 操作左洗車機,清洗噴霧劑操作Q0 1.4,澆水動作Q0.5,洗車機停止運行Q0.6,啟動燈光Q0.7,復位指示燈Q1.0。四個輸入信號,這是I0.0的啟動開關,I0.1 左限位開關,右限位開關及復位按鈕I0.2、I0.3。按下啟動按鈕后,這個系統能夠自動地實現清洗動作,自動停止清洗運作過程,手動復位。但是下次啟動前必須重新設置。由輸出和輸入的數量來看,這里可以使用CPU224。下表1為PLC 的I/O 分配表。
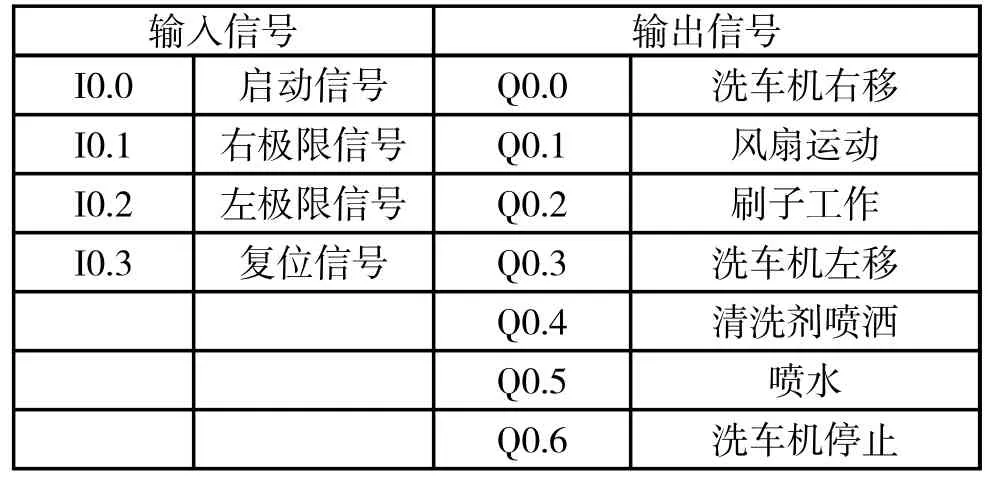
表1 I/O 分配表

3 介紹選型
3.1 傳感器的介紹選型
為了檢測過往車輛以及清洗車輛,此時必須使用傳感器,允許現場條件與光纖傳感器一起使用。一個傳感器只可以探測到車輛的存在,但不可能探測到進入和退出的兩種狀態。所以為了檢測車輛的進出狀態,必須要使用兩個傳感器。通過判斷兩個傳感器檢測車輛的先后順序,確定車輛的出入口。當車輛進入車輛時,傳感器A2 首先檢測車輛,然后是A1。當汽車離開汽車時,傳感器A1 首先檢測它,A2 稍后檢測它。根據現場的實際需要,兩個傳感器之間的距離一般比較近,所以身體會同時覆蓋兩個傳感器。因此,判斷車輛進出的標準是:當A1 為1 時,A2 經歷一個上升沿出車,反之亦然。根據要求,此處應選擇對射式光電傳感器。型號選擇為BJ15M-TDT,最遠可以檢測15 米,完全符合本次設計要求。下表2 為該傳感器的參數表。

圖4 對射式光電傳感器
3.2 電機的介紹選型
三相異步交流電動機的優點正是我們所需要的,比如它聲音小、可以使用的時間長,節省電力、維修起來簡單、效率高等等。在主電路上,這里的電動機我選擇了異步三相電動機100L2-4,采用“Y”型接法,轉速選擇1500r/min,功率為3kW。額定電壓為380(V),額定電流為6.8(A)。安裝尺寸和功率等級完全合乎電工委員會的執行標準。三相異步電動機的參數表如下表3 所示。
3.3 水泵的介紹選型
根據電氣要求,此處的電機選型要求電機功率不得大于5kW,不然的話會影響電機的壽命,所以水泵的參數如下表4。
4 自動洗車控制系統軟件實現
4.1 預洗車階段
在洗車前的準備階段,做一些準備工作,車主將需要清潔的車送到指定的清洗地點,做一些準備工作,然后就可以開始洗車了。

表2 BJ15M-TDT 對射式光電傳感器參數表

表3 三相異步電機參數表

表4 水泵參數表
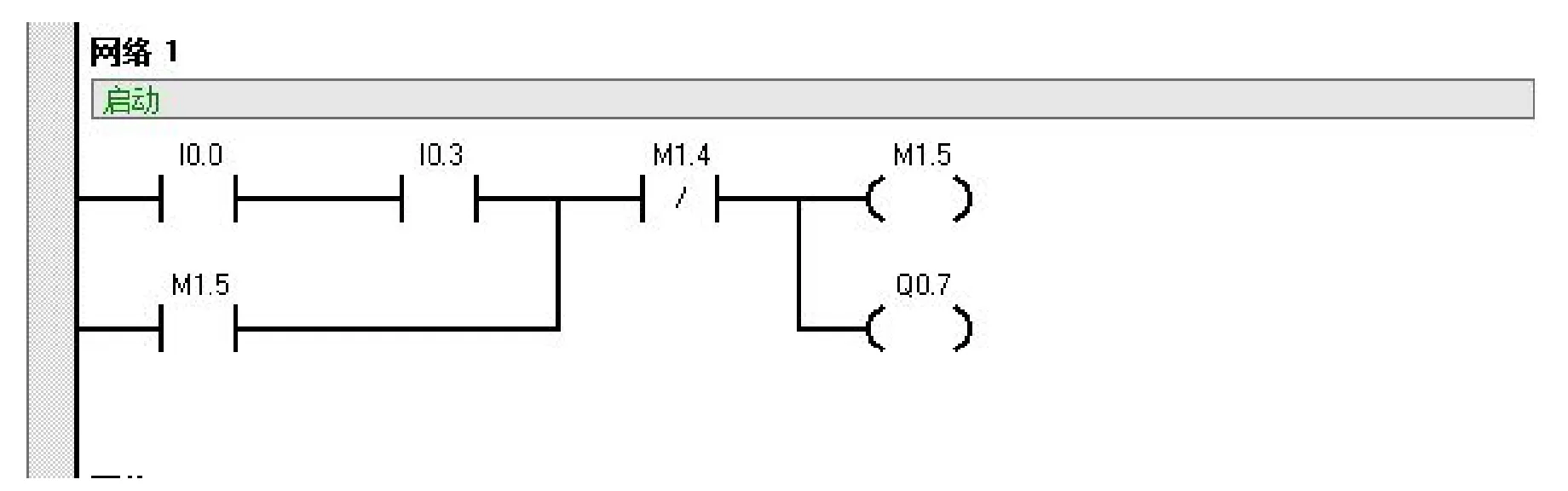
圖5 啟動程序梯形圖
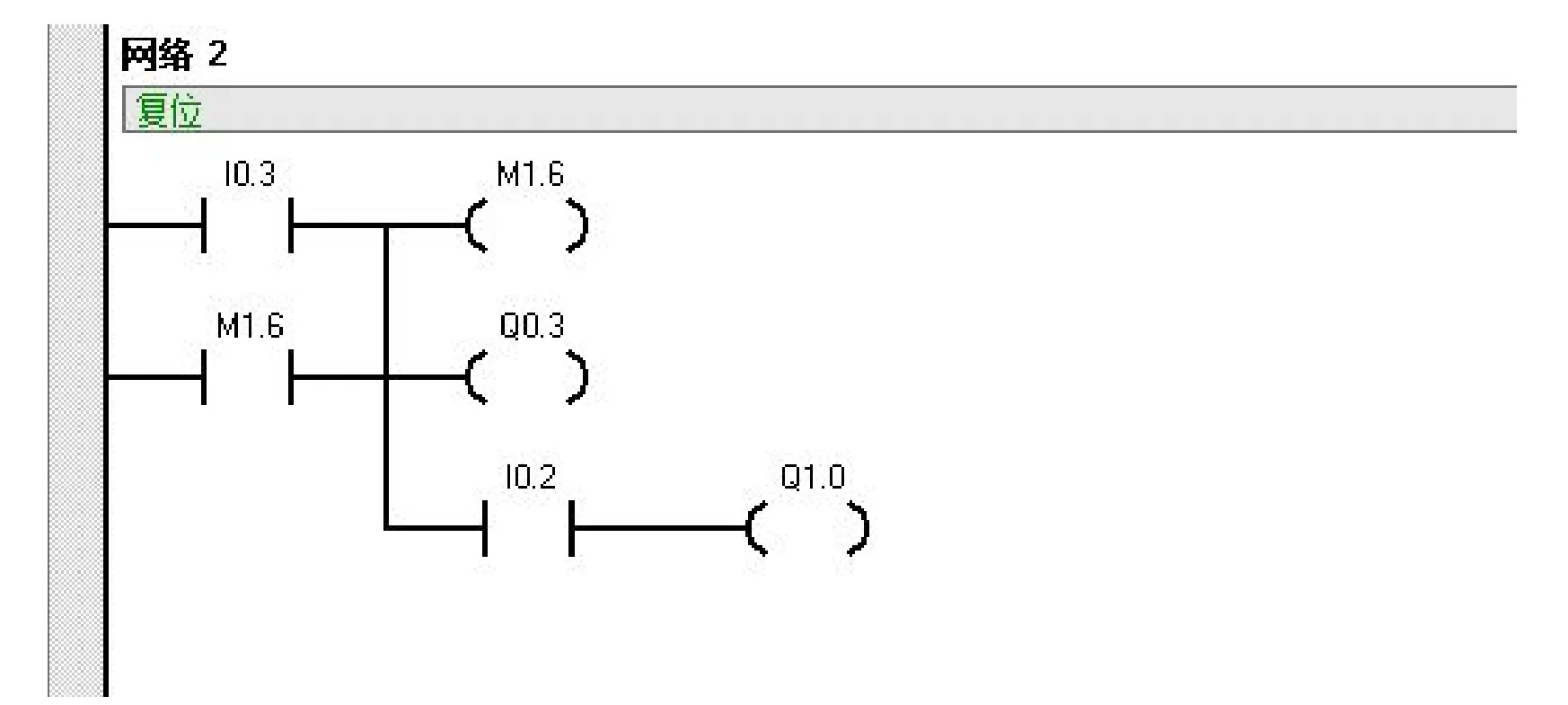
圖6 復位程序梯形圖
4.1.1 啟動
工作人員手動觸發啟動按鈕,這個時候系統就開始工作,啟動輸入信號I0.1 通電,I0.3 得電,觸發啟動信號,啟動燈亮起,線圈M1.5 持續保持得電狀態。
4.1.2 復位
在洗車完畢后,在下一輛車停到清洗位置之前,需要人工復位,這時人工按下復位按鈕,I0.3 得電,與此同時使得M1.6 以及Q0.3 兩個線圈工作,此時汽車清洗機向左運作,當汽車清洗機抵達左邊的極限開關后,I0.2 得電,此時會同時觸發Q0.1,所以復位燈亮起。
4.2 洗車階段
4.2.1 左右移動
汽車清洗機左右移動工作狀態,在啟動系統之后,M0.0會持續保持得電狀態,在車子抵達右邊的限位開關以后,I0.1 就可以得電,同時觸發Q0.3 和M0.1,I0.0 關閉,M0.0和Q0.0 得電,這個時候汽車清洗機就可以開始向右運作。
4.2.2 刷子運作
Q0.2 觸發之后,刷子會以周期為5 秒的循環運動開始工作,而且會適當情況下停止。
4.2.3 清洗劑噴灑

圖7 左移程序梯形圖
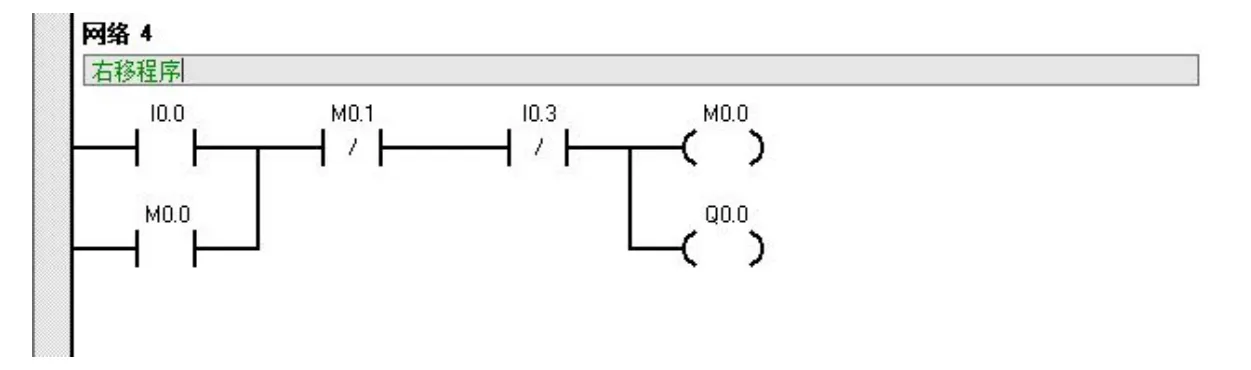
圖8 右移程序梯形圖
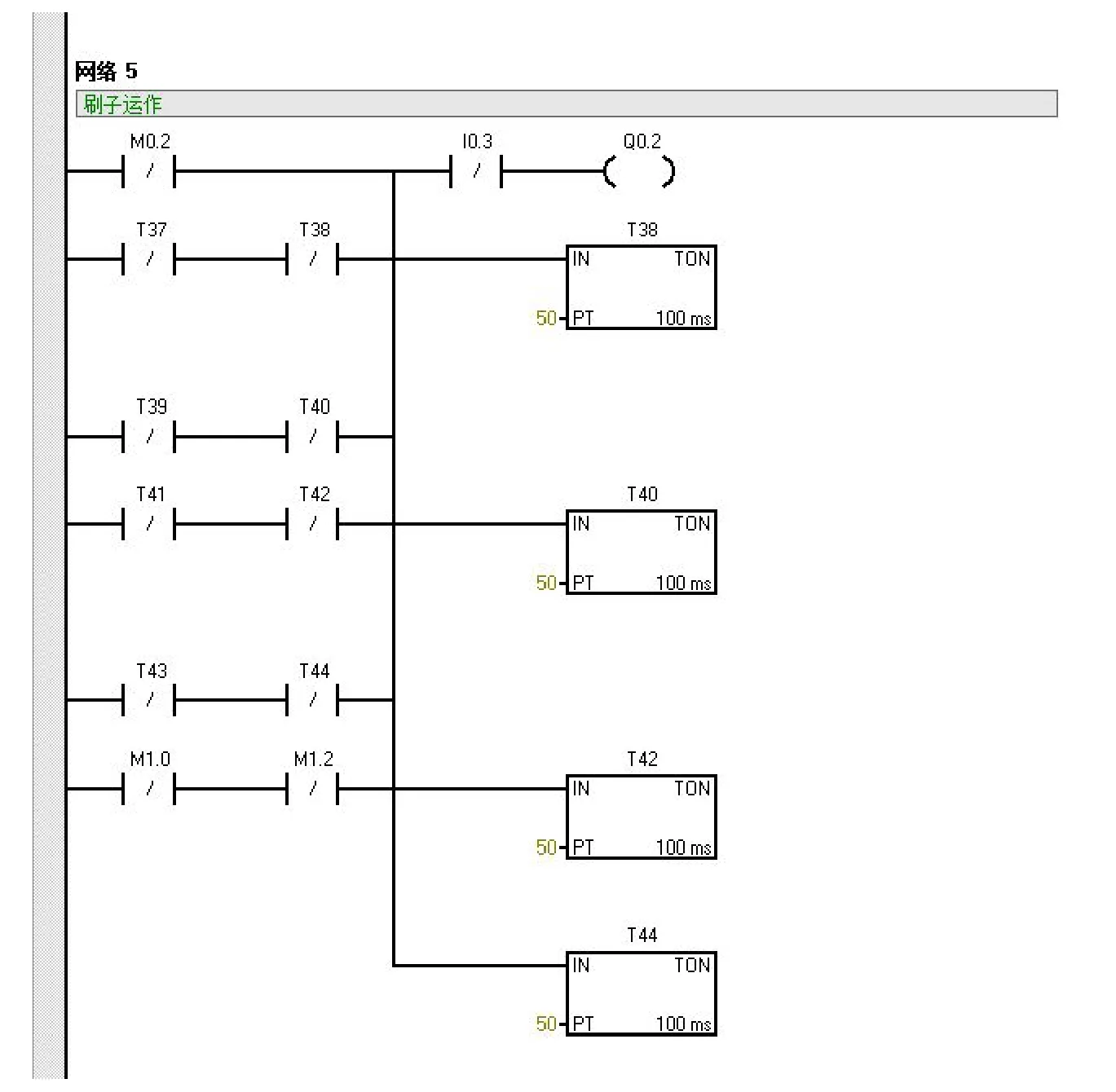
圖9 刷子運作程序梯形圖
噴灑洗潔劑的運行過程為,線圈M0.2 得電,同時觸發M0.3 和Q0.4 兩個線圈,此時整個系統就可以開始噴灑清洗劑了,但是在這個過程中,線圈M0.3 還是一直處于得電的狀態。
4.2.4 風干
風干的運作原理為,當洗車機向左邊移動,而且在快要觸碰到左邊的極限開關時,會同時觸發Q0.1、Q0.0 以及線圈M1.2,此時,汽車清洗機開始向右邊運動,風干動作開始進行。
5 自動洗車控制系統仿真與調試
5.1 仿真軟件
組態軟件指的是一些預設各種軟件模塊可以很容易地實現和完成監控層的功能,數據采集與過程控制而使用的專用軟件,它們能以靈活的非編程方式提供良好的用戶界面開發和使用簡單的方法,它們可支持各種計算機硬件制造商和I/0 設備,是在自動控制系統監控層的水平的軟件平臺和開發環境以及高度可靠的工業控制機和網絡系統,以控制層和所有的接口管理軟件和硬件,系統集成。
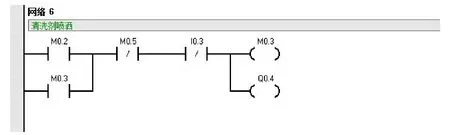
圖10 清洗劑噴灑程序梯形圖
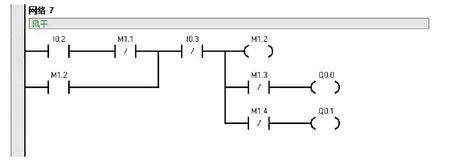
圖11 風干程序梯形圖
美國是世界上第一個發布監控組態軟件的國家,他們在上個世紀80 年代就已經將組態軟件進行商用了,那個時候的軟件叫INTOUCH,開發INTOUCH 的公司為WONDERWARE——是世界上最先將組態軟件商用的專業軟件公司。從那以后,組態軟件便開始發展起來。目前,世界上有幾十種配置軟件。國際上耳熟能詳的監控配置軟件有虛擬儀器、Citech、Fix、英塔吉、Wincc 等等。
組態軟件主要用于顯示靜態圖像,而且還增加了以各種其他格式加載圖像的能力。讓位圖構建不僅僅顯示標準的Windows 位圖文件。組態軟件同樣有著很厲害的數據處理功能,它可以對工業站點上產生的數據進行各種樣式的數字統計處理,用戶完全可以獲得關于某個站點的第一手數據。而且用戶還可以構建組態軟件實現與站點的對接,通過計算機了解場地的所有情況。還可以通過組態軟件模擬理想的場地條件,用戶可以實現許多組態軟件無法模擬的變量。
計算機在工業領域的大范圍應用,以及工業級自動化水平的飛速提升,讓人們對工業自動化控制提出了越來越高并且越來越嚴格的要求。以往傳統的工業控制軟件已經不能滿足用戶的所有需求,因為在工業領域運用了種類繁多的過程監控設施和控制設施[10]。而且,如果在工業的嚴格環境中,一旦某一個開發的環節出現了某種問題,或者發生了某一個小變化,所有的程序都將功虧一簣,人們就得花費大量的時間去修改整個系統的源程序,那將變得異常的困難。
5.2 仿真結果顯示
用仿真軟件建立仿真模擬圖,左半部分表示洗車車間的設備分布,右半部分則是人工操作面板,洗車過程都會在控制面板一一亮起指示燈。洗車的時候工作人員可以實時觀察車子清洗進程中的每一步,并且能夠在必要的時候進行復位等應急操作。
本文使用了PLC 編程技術、配置軟件仿真知識、傳感器的選擇等,設計了一個較為普通的自動洗車控制系統,希望能夠通過研究PLC 編程技術背景及其原理、介紹自動洗車控制系統的現狀,然后給研究自動洗車控制系統系統擬定了初步的思路。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
汽車與安全(2019年9期)2019-11-22 09:48:03
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
家庭影院技術(2017年9期)2017-09-26 03:41:45
作文大王·低年級(2016年4期)2016-04-18 00:24:37
決策探索(2014年21期)2014-11-25 12:29:50