無人機機載激光雷達在輸電線路巡線中的應用
2021-01-28 12:43:52丁華張輝
機電信息 2021年3期
丁 華 張 輝
(1.貴州電網有限責任公司輸電運行檢修分公司,貴州貴陽550002;2.中國電建集團貴州電力設計研究院有限公司,貴州貴陽550081)
0 引言
隨著電網規模的迅速擴大,對于經濟發展較慢的山區,大規模的輸電線路長期暴露于雨雪、寒流、高溫高壓等環境下,給輸電線路造成了巨大損害,如金具銹蝕、導線斷股、絕緣子閃絡等。
為了保證輸電線路的安全穩定運行,各電力巡檢系統都需要對輸電線路進行定期巡檢。
傳統輸電線路的巡檢主要依靠人工巡線,存在巡線周期長、效率低、成本高等缺點,已不能滿足大規模電網的巡線需求,而惡劣的環境、艱苦的條件也給人工巡檢帶來了很大的限制。
直升機的出現雖然給輸電線路巡檢帶來了極大的便利,但是直升機需要由專業的技術人員操作,一般電力巡檢公司均沒有直升機,可操作性不強,同時直升機巡檢需要申請空域,手續繁多,會浪費大量時間。
因此,輕便的無人機給輸電線路巡檢帶來了質的改變,其結合激光雷達對輸電線路進行點云采集,解決了機載相機無法準確得到輸電線路通道內地物至電力線距離的問題[1]。
1 無人機機載激光雷達系統
1.1 無人機系統
無人機是一種可自主飛行或遠程引導、不搭載人員的動力飛行器。無人機因可以搭載相機、定位系統、信息傳輸系統等硬件而廣泛應用于緊急救災、農業、測繪等領域。
通常情況下,無人機系統除了無人機本體外,還包括飛行控制系統、動力系統、能源系統、任務荷載設備、通信系統、地面監控站。
(1)飛行控制系統作為整個系統的核心部位,用于控制無人機的起飛、降落等各種工作狀態。
(2)動力系統即發動機及相關附件設施。
(3)能源系統即為無人機系統提供電能的相關部件。
(4)任務荷載設備即根據業務需求搭載的相關軟硬件設備,如氣象設備、農藥噴灑設備、相機等。
(5)通信系統即數據傳輸軟硬件。
(6)地面監測站用于控制并調整無人機飛行的路線、高度、角度等參數[2]。
1.2 機載激光雷達
機載激光雷達包含了激光掃描儀、GPS、IMU、數碼相機等光譜成像設備。激光掃描儀可以主動獲取輸電線路通道的點云數據,結合GPS定位經坐標的轉換獲得通道內地物的三維坐標信息。點云數據是離散不規則的點,其格式主要有兩種,ASCII碼純文本和LAS格式。由于地物復雜多樣[3],因此需要對點云數據進行分類處理以區別不同的地物。
機載激光雷達技術獲得的地物精度準確,操作快捷迅速,在測繪行業具有重要的作用,隨著軟硬件技術的迅速發展,其已逐步用于地物的自動化分類。
2 輸電線路激光點云的采集及數據處理
2.1 激光點云數據采集
(1)點云數據采集的前期準備工作包括實地踏勘、航線設計等。
1)實地踏勘的目的是詳細了解測區的情況,如測區邊界、地形地貌、交通情況等。
2)航線設計遵循高效、經濟的原則,在實地踏勘的基礎上,根據已有地形圖并按照需求方的要求、行業規范及實地具體天氣情況,制定詳細的航飛路線、航飛計劃及人員安排計劃。隨著點云數據采集的進行,航飛設計要不斷變化更新,以保質保量地完成數據采集工作。
(2)點云數據的采集包括控制測量、數據采集、補測等。
1)控制測量的目的是通過選點埋石、網型的設計及測量、數據的解析等建立點云數據的坐標基準。
2)數據采集包括設備安裝、設備檢查、試飛爬升、自主巡航、返回降落。其中設備檢查是為了確保外業數據采集的順利完成,主要包括無人機設備外形、零部件及性能的檢查以及激光雷達設備的供能設備檢查。
3)補測是在對外業采集的數據進行檢查的基礎上,對漏飛、點云密度不符合要求的區域進行補飛測量。
2.2 點云數據處理
點云數據處理包括數據的預處理、數據的處理及分析。
(1)數據的預處理包含數據的質量檢查、數據轉換、軌跡解算、點云數據解算等。
1)數據質量的檢查主要有檢查機載雷達POS數據是否完整、點云數據是否有漏洞、前后兩天時間及不同架次數據是否無縫拼接等。
2)數據轉換是將地面基站和機載POS系統獲取的原始數據轉換成通用的數據格式。
3)軌跡解算經后差分處理獲得飛行平臺的三維坐標。
4)點云數據的解算是根據軌跡解算的結果與原始點云數據獲得輸電線路通道內點云數據的三維坐標。
(2)數據的處理包含數據的去噪、點云數據的分類、危險點分析、工況模擬分析等。
2.2.1 點云去噪
在無人機飛行過程中,輸電線路通道內的地物、輸電線、桿塔等的外形、材質以及空中漂浮物會造成點云數據存在部分噪聲點。此外,無人機飛行過程中的減速、轉彎、地面起伏等因素,也會造成點云數據存在部分噪聲點。噪聲點的存在會在一定程度上干擾點云數據的分類及危險點的分析。
點云去噪圖如圖1所示,圓圈內的點即為噪聲點。
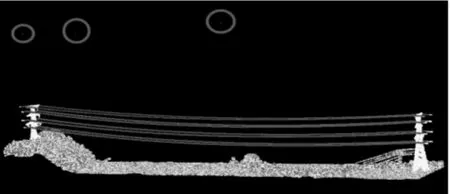
圖1 點云去噪圖
2.2.2 點云分類
激光雷達采集數據時,一次性采集通道內的所有目標,為了更好地區分多樣地物,并根據不同地物點云測算地物至輸電線路的距離與交叉跨越距離,需要進行點云分類。通常情況下,輸電線路的通道點云可以分為電力線、桿塔、高植被、低植被、建筑、道路。為了區分不同目標,用不同的顏色對分類后的點云加以區分,分類方法通常采用濾波分類法。點云分類效果圖如圖2所示。
2.2.3 危險點分析
根據點云分類的結果分別計算導線間的交叉跨越距離、導線與地物之間的距離,并根據電網行業要求的安全距離規范,判定測算距離是否安全并劃分危險點等級。為便于存檔和巡檢人員現場排除安全隱患,需生成危險點分析報告。
如圖3所示,黑色點是測算出來的危險植被點。危險點分析報告如圖4所示。
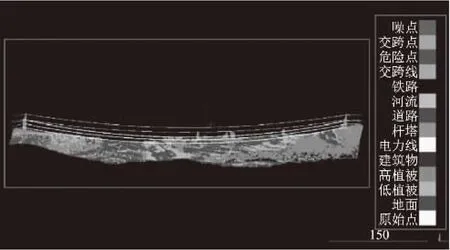
圖2 點云分類效果圖
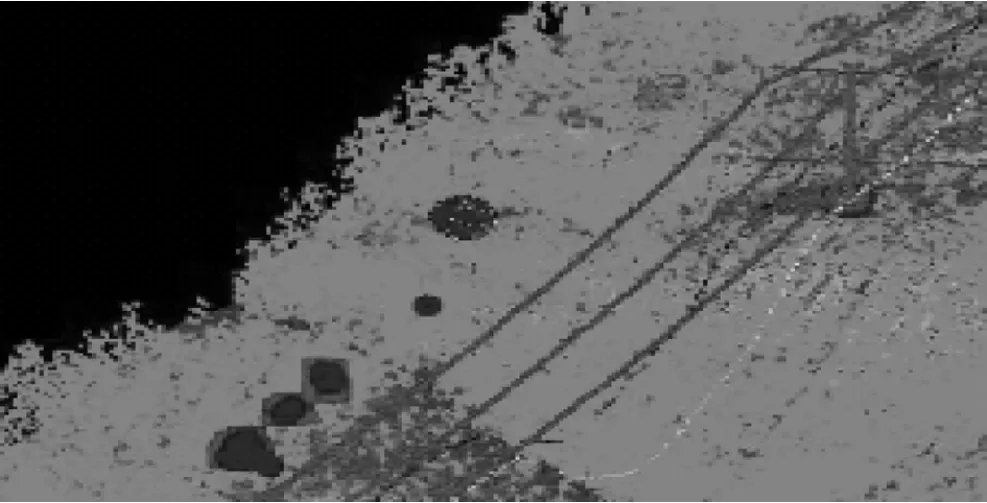
圖3 危險植被點圖
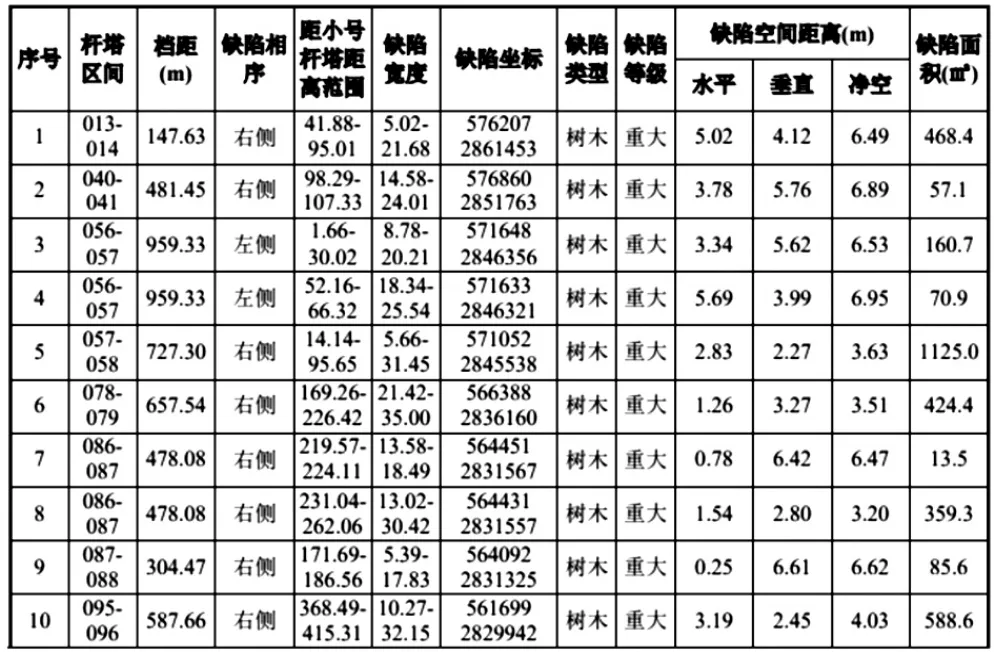
圖4 危險點分析報告圖
2.2.4 工況模擬分析
輸電線路長期處于動態的野外環境中,環境的變化會給線路的安全運行帶來巨大的威脅,如由自然環境引起的線路舞動、覆冰、風偏都會對輸電線路造成損害,且在惡劣的環境下,巡檢人員工作受到限制,因此需要進行工況模擬。根據懸鏈線方程及氣溫、風速等因子模擬分析線路的變化,動態評估輸電線路的狀態。
工況模擬結果如圖5所示。
3 結語
利用無人機機載激光雷達技術對輸電線路進行外業巡檢,根據數據的處理分析實現點云數據的分析、危險點分析、工況模擬分析,可實現對輸電線路通道的快速巡檢。此技術解決了復雜地區巡檢難的問題,大幅度降低了人力勞動成本,提高了巡檢效率。同時,激光雷達技術實現了輸電線路的三維坐標測量,且精度較高,實踐證明,輕量化、成本低的無人機在電力巡檢中具有重要作用。
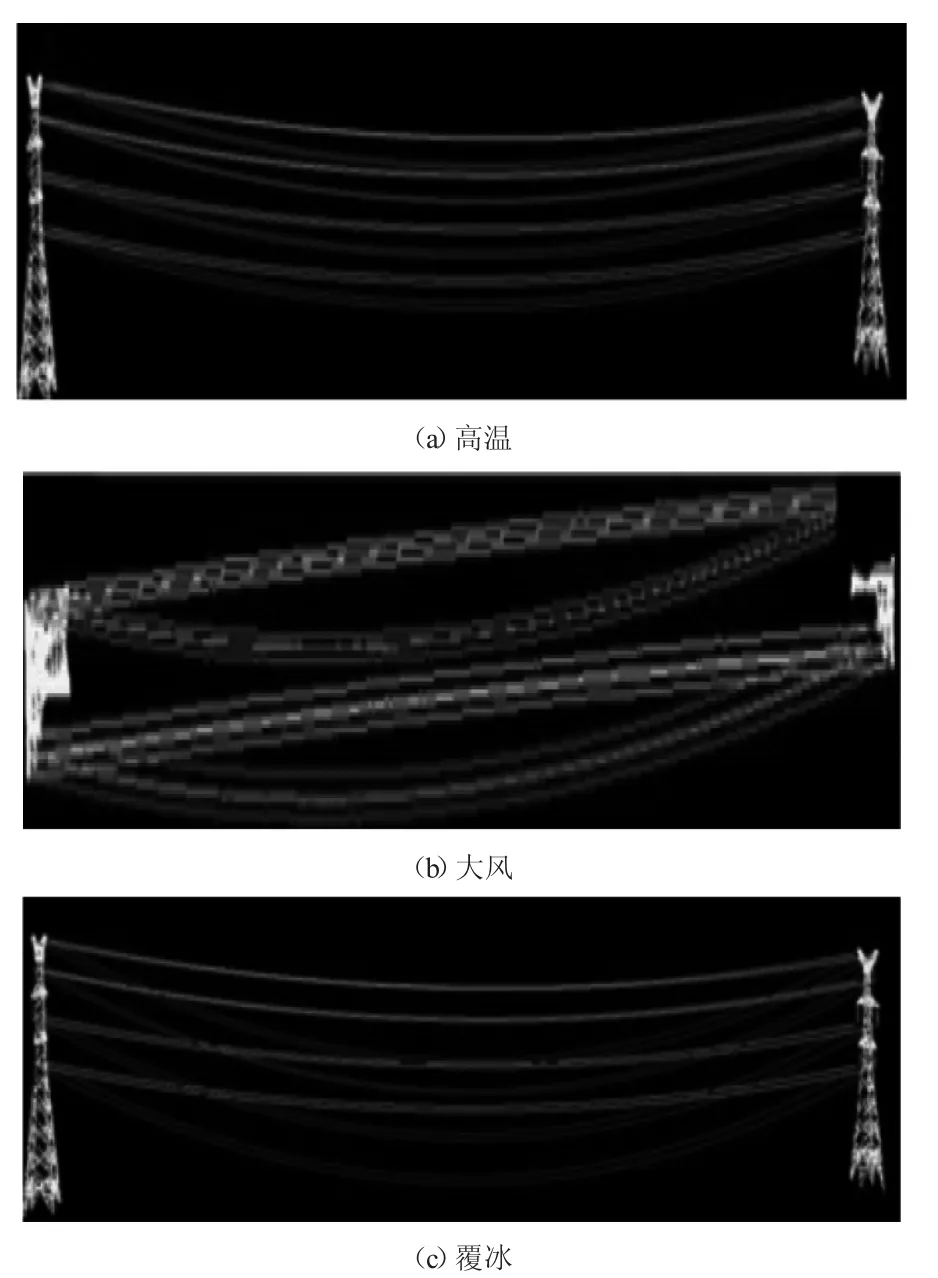
圖5 工況模擬圖
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
數學小靈通(1-2年級)(2021年4期)2021-06-09 06:25:56
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
中學生數理化·七年級數學人教版(2019年4期)2019-05-20 10:06:32
電子制作(2018年18期)2018-11-14 01:48:24
電子制作(2018年11期)2018-08-04 03:26:08
中學生數理化·七年級數學人教版(2018年6期)2018-06-26 08:36:06
初中生世界·七年級(2017年9期)2017-10-13 22:27:46
山東工業技術(2016年15期)2016-12-01 05:31:22
工業設計(2016年12期)2016-04-16 02:52:00