直流無刷電機(jī)轉(zhuǎn)向與三相布線及霍爾位置傳感器的關(guān)系分析
2021-01-25 08:05:24成俊康
通信電源技術(shù) 2020年18期
楊 軒,楊 凡,成俊康,陳 晨
(1.西安地區(qū)第一軍事代表室,陜西 西安 710025;2.西安航天動力測控技術(shù)研究所,陜西 西安 710025)
0 引 言
無刷直流電動機(jī)是隨著半導(dǎo)體電子技術(shù)發(fā)展而出現(xiàn)的新型機(jī)電一體化電機(jī),是現(xiàn)代電子技術(shù)、控制理論和電機(jī)技術(shù)相結(jié)合的產(chǎn)物[1]。無刷直流電動機(jī)由電動機(jī)和驅(qū)動器兩部分組成[2],由于運(yùn)行原理需要,還需要位置傳感器,位置傳感器檢測出轉(zhuǎn)子磁場軸線和定子相繞組軸線的相對位置,進(jìn)而將信號傳遞給控制器,控制器依據(jù)此信號決定當(dāng)下時刻相繞組的通電狀態(tài)[3-5],相繞組通電后,產(chǎn)生磁場,推動轉(zhuǎn)子的旋轉(zhuǎn)。
1 問題描述
通常,電機(jī)需求方會指定電機(jī)轉(zhuǎn)向以及電機(jī)在指定轉(zhuǎn)向時對應(yīng)的相繞組電流流向和真值表,電機(jī)設(shè)計者按照需求進(jìn)行設(shè)計,這樣就能保證電機(jī)產(chǎn)品與配套控制器對接時輸出轉(zhuǎn)向符合要求。但現(xiàn)實中,往往會出現(xiàn)實際轉(zhuǎn)向與需求相反,這在很大程度上是因為電機(jī)設(shè)計者沒有將真值表、相繞組電流流向轉(zhuǎn)化為電機(jī)設(shè)計時需要考慮的因素,特別是電機(jī)需求方有時會要求電機(jī)引出線在輸出軸一端,或電機(jī)引出線在非出軸一端時,并且如果再將電機(jī)雙備份考慮進(jìn)去,情況會更加復(fù)雜,往往讓人費(fèi)解。因此,本文將從電機(jī)引出線位置出發(fā),借助實例,探討電機(jī)轉(zhuǎn)向與三相布線、霍爾位置傳感器的關(guān)系,并引出電機(jī)在有雙備份要求時,如何梳理電機(jī)轉(zhuǎn)向與三相布線、霍爾位置傳感器的關(guān)系。
2 電機(jī)轉(zhuǎn)向與三相布線及霍爾位置傳感器的關(guān)系分析
首先分析電機(jī)需求方規(guī)定的電機(jī)轉(zhuǎn)向(本文中提到的轉(zhuǎn)向如果沒有說明都是從輸出軸端看的方向)、相繞組電流流向、真值表的具體含義。舉例說明,要求電機(jī)順時針轉(zhuǎn)動時,真值表需求如表1所示。
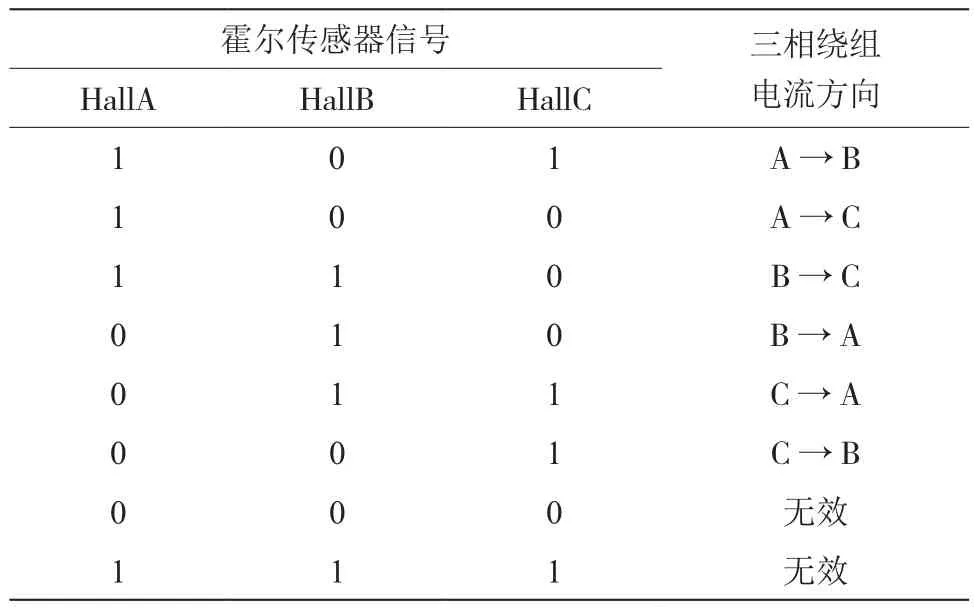
表1 順時針轉(zhuǎn)動真值表
從表1中可以看出,霍爾傳感器總共輸出6組有效的狀態(tài)信號,每組狀態(tài)信號包含3個霍爾HallA、HallB、HallC的信號,控制器接收到某1組狀態(tài)信號,就會按照預(yù)先約定好的邏輯控制對應(yīng)相繞組的導(dǎo)通。例如,當(dāng)霍爾傳感器狀態(tài)信號為011時,控制器接收到此信號后,會開通或關(guān)斷部分開關(guān)管,使得C→A(CA)兩相繞組通電,電流從C相繞組起頭流入,從A相繞組流出。CA兩相繞組通電時,就會在電機(jī)定轉(zhuǎn)子氣隙中產(chǎn)生磁場,該磁場對電機(jī)轉(zhuǎn)子中永磁體會產(chǎn)生力的作用,從而帶動轉(zhuǎn)子轉(zhuǎn)動。當(dāng)轉(zhuǎn)子轉(zhuǎn)動時,霍爾傳感器會依次循環(huán)輸出6組狀態(tài)信號101→100→110→010→011→001,控制器也會依次循環(huán)接收到此信號,然后按照預(yù)先約定好的邏輯依次循環(huán)控制對應(yīng)相繞組AB→AC→BC→BA→CA→CB的導(dǎo)通,因此電機(jī)定轉(zhuǎn)子氣隙間就會產(chǎn)生循環(huán)的步進(jìn)式旋轉(zhuǎn)磁場,如果此時的旋轉(zhuǎn)磁場方向正好是順時針旋轉(zhuǎn),電機(jī)轉(zhuǎn)子就會順時針轉(zhuǎn)動,使得電機(jī)實際運(yùn)行方向與需求方向一致。
電機(jī)需求方規(guī)定的電機(jī)旋轉(zhuǎn)方向都以從輸出軸端看時為基準(zhǔn),而電機(jī)三相布線的實際操作都以電機(jī)引出線為參考方向。因此,當(dāng)電機(jī)引出線與輸出軸端一致或者不一致時,電機(jī)設(shè)計者按照需求方規(guī)定的旋轉(zhuǎn)方向進(jìn)行電機(jī)三相布線設(shè)計,并將布線設(shè)計傳遞給下游操作者時就會有一定的差別。
2.1 電機(jī)引出線指定在非出軸端
電機(jī)引出線指定在非出軸端,電機(jī)按照AB→AC→BC→BA→CA→CB順序依次導(dǎo)通時,電機(jī)順時針轉(zhuǎn)動。由此可以推斷出,電機(jī)三相ABC布線完成后,從電機(jī)引出線端看,電機(jī)ABC三相形成的磁動勢軸線是逆時針旋轉(zhuǎn)分布的,并且電角度相位相差120°。
如果三相繞組按照該工藝指導(dǎo)進(jìn)行下線,則可以推導(dǎo)出三相繞組A→B→C的磁動勢軸線是按照逆時針分布的(從出線端視之)。
具體分析為,控制器按照表1的邏輯決定當(dāng)下時刻繞組的導(dǎo)通,即控制器接收位置傳感器的某1組狀態(tài)信號,按照預(yù)先設(shè)定的邏輯導(dǎo)通三相繞組對應(yīng)的兩相繞組,電機(jī)的實際旋轉(zhuǎn)方向應(yīng)與需求方向一致。圖1為10P12S電機(jī)轉(zhuǎn)向分析圖圖(電機(jī)引出線指定在非出軸端)。
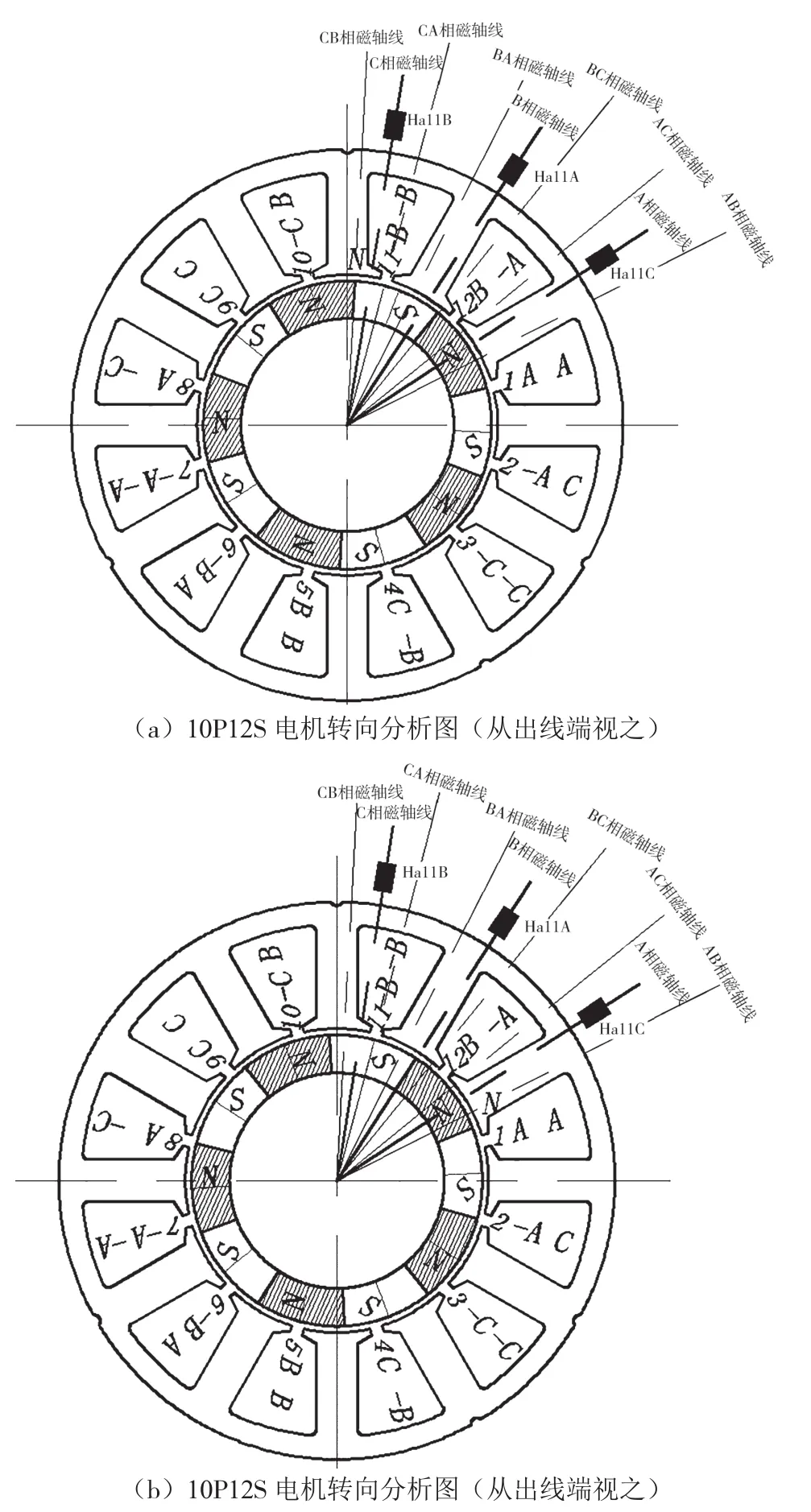
圖1 10P12S電機(jī)轉(zhuǎn)向分析圖(電機(jī)引出線指定在非出軸端)
圖1(a)中,HallA、HallB、HallC依次布置在B相、C相、A相磁動勢軸線對應(yīng)位置,霍爾集成電路標(biāo)志面面向圓心。當(dāng)永磁體的S極面向霍爾集成電路標(biāo)志面,磁通密度B定義為正,此時霍爾集成電路輸出為低電平0。因此當(dāng)定轉(zhuǎn)子起始隨機(jī)位置如圖1(a)所示時,HallA、HallB、HallC輸出的狀態(tài)信號為001,此時按照表1的設(shè)定邏輯,CB兩相繞組通電在定轉(zhuǎn)子氣隙中產(chǎn)生磁場,轉(zhuǎn)子受到該磁場力的作用,逆時針轉(zhuǎn)動(出線端視之)。當(dāng)電機(jī)轉(zhuǎn)子逆時針轉(zhuǎn)動(出線端視之)時,會引起霍爾輸出狀態(tài)的變化。圖1(b)中,當(dāng)電機(jī)轉(zhuǎn)子轉(zhuǎn)動到此位置時,HallA面向S極和N的分界面,只要轉(zhuǎn)子再逆時針(出線端視之)轉(zhuǎn)動一點,HallA的輸出信號就由0跳變?yōu)?,位置傳感器的狀態(tài)信號也由001轉(zhuǎn)變?yōu)?01,因此繞組的導(dǎo)通順序由CB轉(zhuǎn)變?yōu)锳B,AB兩相繞組導(dǎo)通產(chǎn)生的磁場會繼續(xù)推動轉(zhuǎn)子逆時針轉(zhuǎn)動(出線端視之)。當(dāng)轉(zhuǎn)子繼續(xù)轉(zhuǎn)動時,霍爾傳感器會依次循環(huán)輸出6組狀態(tài)信號001→101→100→110→010→011,控制器也會依次循環(huán)接收到此信號,然后按照預(yù)先約定好的邏輯依次循環(huán)控制對應(yīng)相繞組CB→AB→AC→BC→BA→CA的導(dǎo)通,因此電機(jī)定轉(zhuǎn)子氣隙間就會產(chǎn)生逆時針(出線端視之)循環(huán)的步進(jìn)式旋轉(zhuǎn)磁場,電機(jī)轉(zhuǎn)子就會逆時針(出線端視之)循環(huán)轉(zhuǎn)動。從輸出軸端看電機(jī)順時針轉(zhuǎn)動,因而電機(jī)實際運(yùn)行方向與需求方向(見表1)一致。每兩相繞組導(dǎo)通時,會推動轉(zhuǎn)子旋轉(zhuǎn)60°電角度。
因此,當(dāng)電機(jī)引出線在非出軸端,需求控制邏輯如表1所示,即電機(jī)按照CB→AB→AC→BC→BA→CA依次導(dǎo)通時,電機(jī)應(yīng)順時針旋轉(zhuǎn),則電機(jī)在設(shè)計時,應(yīng)使得電機(jī)三相繞制產(chǎn)生的A→B→C磁動勢軸線逆時針(出線端視之)分布,即ABC三相繞組的相對電相位按照逆時針(出線端視之)方向依次增大,互差120°電角度。
2.2 電機(jī)引出線指定在出軸端
電機(jī)引出線指定在出軸端,此時出線端觀察的方向與出軸端觀察的方向一致。電機(jī)按照AB→AC→BC→BA→CA→CB順序依次導(dǎo)通時,電機(jī)順時針轉(zhuǎn)動。由此可以推斷出,電機(jī)三相ABC布線完成后,電機(jī)ABC三相形成的磁動勢軸線是順時針旋轉(zhuǎn)分布的,并且電角度相位相差120°。
具體分析為,控制器按照表1的邏輯決定當(dāng)下時刻繞組的導(dǎo)通,即控制器接收位置傳感器的某1組狀態(tài)信號,按照預(yù)先設(shè)定的邏輯導(dǎo)通三相繞組對應(yīng)的兩相繞組,電機(jī)的實際旋轉(zhuǎn)方向應(yīng)與需求方向一致。圖2為10P12S電機(jī)轉(zhuǎn)向分析圖(電機(jī)引出線指定在出軸端)。
圖2(a),HallA、HallB、HallC依次布置在B相、C相、A相磁動勢軸線對應(yīng)位置,霍爾集成電路標(biāo)志面面向圓心。當(dāng)永磁體的S極面向霍爾集成電路標(biāo)志面,磁通密度B定義為正,此時霍爾集成電路輸出為低電平0。當(dāng)電機(jī)轉(zhuǎn)子順時針轉(zhuǎn)動時,會引起霍爾輸出狀態(tài)的變化。圖2(b)中,當(dāng)電機(jī)轉(zhuǎn)子轉(zhuǎn)動到此位置時,HallA面向S極和N的分界面,只要轉(zhuǎn)子再順時針轉(zhuǎn)動一點,HallA的輸出信號就由0跳變?yōu)?,位置傳感器的狀態(tài)信號也由001轉(zhuǎn)變?yōu)?01,因此繞組的導(dǎo)通順序由CB轉(zhuǎn)變?yōu)锳B,AB兩相繞組導(dǎo)通產(chǎn)生的磁場會繼續(xù)推動轉(zhuǎn)子順時針轉(zhuǎn)動。當(dāng)轉(zhuǎn)子繼續(xù)轉(zhuǎn)動時,霍爾傳感器會依次循環(huán)輸出6組狀態(tài)信001→101→100→110→010→011,控制器也會依次循環(huán)接收到此信號,然后按照預(yù)先約定好的邏輯依次循環(huán)控制對應(yīng)相繞組CB→AB→AC→BC→BA→CA的導(dǎo)通,因此電機(jī)定轉(zhuǎn)子氣隙間就會產(chǎn)生順時針循環(huán)的步進(jìn)式旋轉(zhuǎn)磁場,電機(jī)轉(zhuǎn)子就會順時針循環(huán)轉(zhuǎn)動,因而電機(jī)實際運(yùn)行方向與需求方向(見表1)一致。每兩相繞組導(dǎo)通時,會推動轉(zhuǎn)子旋轉(zhuǎn)60°電角度。

圖2 10P12S電機(jī)轉(zhuǎn)向分析圖(電機(jī)引出線指定在出軸端)
因此,當(dāng)電機(jī)引出線在出軸端,需求控制邏輯如表1所示,即電機(jī)按照CB→AB→AC→BC→BA→CA依次導(dǎo)通時,電機(jī)應(yīng)順時針旋轉(zhuǎn),則電機(jī)在設(shè)計時,應(yīng)使得電機(jī)三相繞制產(chǎn)生的A→B→C磁動勢軸線順時針分布,即ABC三相繞組的相對電相位按照順時針方向依次增大,互差120°電角度。
3 電機(jī)繞組雙備份時布線設(shè)計與電機(jī)轉(zhuǎn)向的關(guān)系分析
電機(jī)引出線指定在非出軸端,電機(jī)繞組為雙備份設(shè)計,主備繞組不同時工作。電機(jī)按照AB→AC→BC→BA→CA→CB順序依次導(dǎo)通時,電機(jī)順時針轉(zhuǎn)動。表2為10P12S直流無刷電機(jī)雙備份繞組布線工藝實施表。
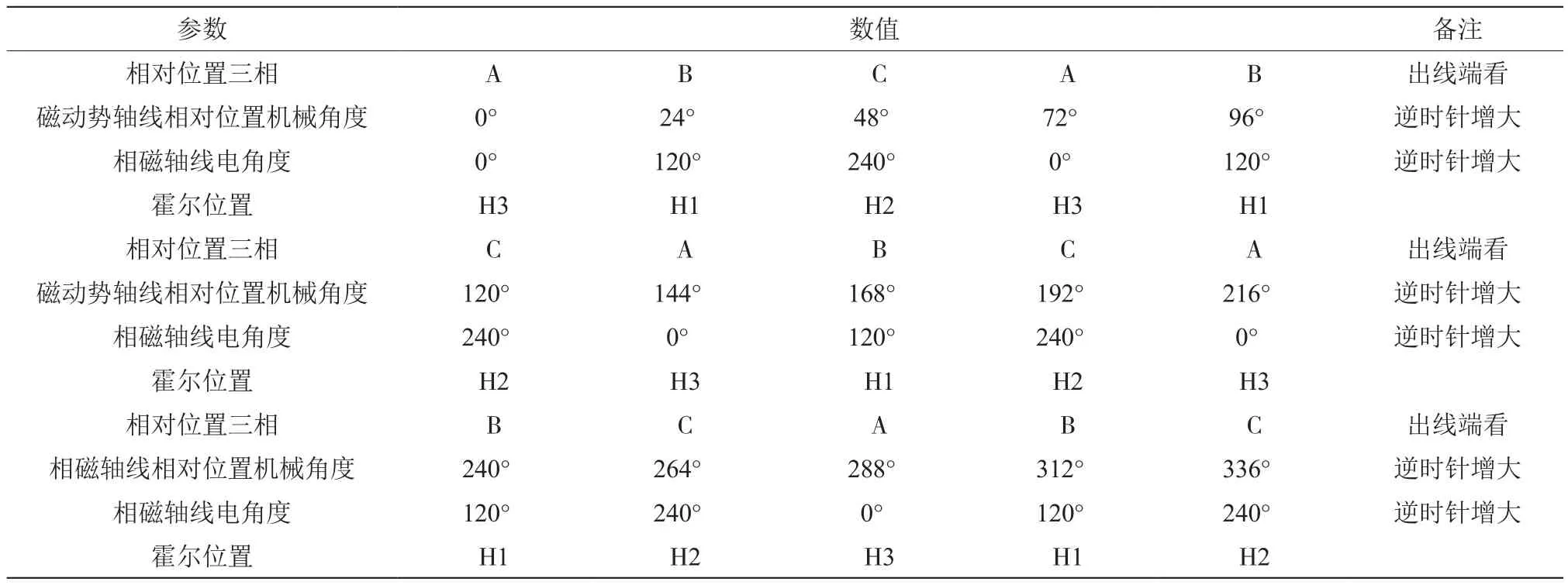
表2 10P12S直流無刷電機(jī)雙備份繞組布線工藝實施表
電機(jī)主備繞組分別形成的ABC三相磁動勢軸線逆時針旋轉(zhuǎn)分布的,并且電角度相位相差120°。因為三相繞組在空間上對稱分布,主A與備A繞組電相位相差180°(主A起始槽為12,備A起始槽為6),因此備繞組形成的三相磁動勢軸線相對主繞組形成的磁動勢軸線逆時針滯后180°電角度。因此如果霍爾也要求雙備份時,備霍爾安裝位置滯后主霍爾安裝位置180°電角度。在雙備份霍爾安裝時,一方面考慮霍爾相對電角度,另外一方面考慮霍爾布局的可操作性。
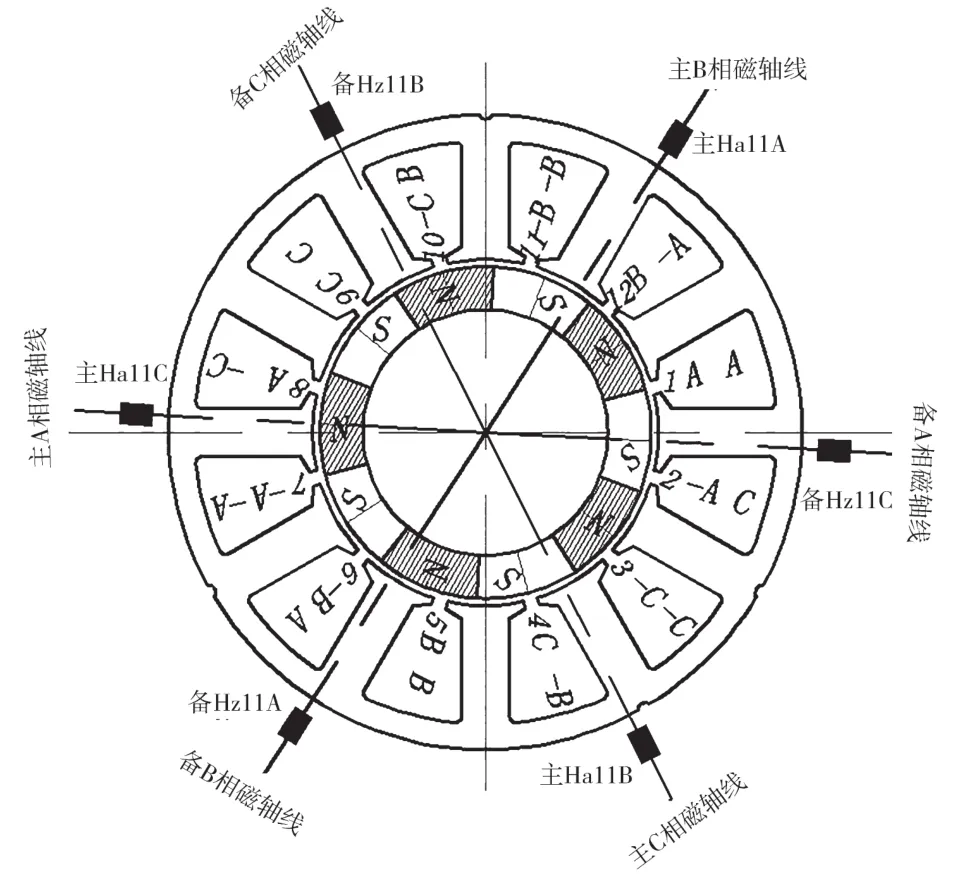
圖3 10P12S直流無刷電機(jī)雙備份繞組霍爾實際布局圖(出線端視之)
從圖3可以看出,備霍爾相對主霍爾分別差了180°機(jī)械角度,180°機(jī)械角度對應(yīng)的電角度為180°電角度,因此與上述霍爾安裝分析相一致。此外,ABC三相磁軸線順時針旋轉(zhuǎn)(出線端視之),但從電角度分析,ABC三相磁動勢軸線逆時針旋轉(zhuǎn)(出線端視之),才能保證電機(jī)按照AB→AC→BC→BA→CA→CB順序依次導(dǎo)通時,電機(jī)順時針轉(zhuǎn)動(出軸端視之)。
4 結(jié) 論
(1)從相繞組的流向判斷出電機(jī)轉(zhuǎn)向與三相磁動勢軸線電角度旋轉(zhuǎn)方向?qū)?yīng)關(guān)系(文中例子為ABC依次通正向電流時,從電機(jī)出軸端看時,電機(jī)順時針旋轉(zhuǎn))。
(2)布線工藝實施保證從出軸端看時,三相形成的磁動勢軸線旋轉(zhuǎn)方向(從相對電角度判定)與電機(jī)轉(zhuǎn)向保持一致。
(3)霍爾位置傳感器的布局為三相ABC霍爾與三相BCA磁動勢軸線是一一對應(yīng),并考慮霍爾布局工藝實施的可操作性。
