考慮安全約束條件的電網(wǎng)運(yùn)行損耗優(yōu)化控制系統(tǒng)設(shè)計(jì)
2021-01-21 12:35:56陶用偉
電子設(shè)計(jì)工程 2021年1期
陶用偉
(貴州電網(wǎng)有限責(zé)任公司凱里供電局,貴州 凱里 556000)
在國(guó)家經(jīng)濟(jì)發(fā)展水平不斷提升的背景下,對(duì)于電網(wǎng)供電量的需求越來越大,因此為了控制電網(wǎng)運(yùn)行中的資源損耗,設(shè)計(jì)一個(gè)電網(wǎng)損耗控制系統(tǒng)。已知現(xiàn)階段的電力系統(tǒng)由各種電壓變電所、輸配電線路組成,主要有變電、輸電以及配電等工作環(huán)節(jié)[1]。
傳統(tǒng)設(shè)計(jì)方法的控制系統(tǒng),由于忽略了約束參數(shù)的重要性,導(dǎo)致單一約束條件下系統(tǒng)的運(yùn)行穩(wěn)定性較差,使損耗控制效果并不理想,因此文中考慮安全約束條件,設(shè)計(jì)一個(gè)電網(wǎng)運(yùn)行損耗優(yōu)化控制系統(tǒng)。該系統(tǒng)充分考慮系統(tǒng)的使用安全性約束條件,通過優(yōu)化各項(xiàng)控制模量,增強(qiáng)系統(tǒng)在執(zhí)行控制任務(wù)過程中的穩(wěn)定性,提高抗干擾性,降低電網(wǎng)運(yùn)行損耗,在很大程度上節(jié)約了資源,為國(guó)家戰(zhàn)略性發(fā)展目標(biāo)的實(shí)現(xiàn)提供技術(shù)支持[2]。
1 電網(wǎng)運(yùn)行損耗優(yōu)化控制系統(tǒng)硬件設(shè)計(jì)
電網(wǎng)運(yùn)行損耗優(yōu)化控制系統(tǒng)中,由于設(shè)備種類繁多復(fù)雜,且連接位置相對(duì)分散,除了變送電外還有許多配置環(huán)節(jié),因此為保證系統(tǒng)運(yùn)行的穩(wěn)定性,在電網(wǎng)運(yùn)行損耗優(yōu)化控制系統(tǒng)中添加了監(jiān)控模塊。電網(wǎng)運(yùn)行損耗控制系統(tǒng)主要包括4個(gè)部分:上位機(jī)監(jiān)控模塊、系統(tǒng)控制器、EtherCAT從站以及現(xiàn)場(chǎng)儀表等各類執(zhí)行機(jī)構(gòu)。為保證控制系統(tǒng)數(shù)據(jù)的實(shí)時(shí)監(jiān)控以及穩(wěn)定通訊,對(duì)傳統(tǒng)系統(tǒng)控制器即主站控制器進(jìn)行替換,圖1為主控器實(shí)物圖[3]。

圖1 主控器實(shí)物圖
主控器作為電網(wǎng)運(yùn)行損耗優(yōu)化控制系統(tǒng)的核心設(shè)備,能夠保證軟件平臺(tái)的運(yùn)行、程序的運(yùn)算、控制命令的生成以及數(shù)據(jù)的存儲(chǔ)。文中選用的主控器利用其自身的PC控制技術(shù),實(shí)現(xiàn)人機(jī)交互性更強(qiáng)的數(shù)據(jù)采集、存儲(chǔ)、處理以及反饋,實(shí)現(xiàn)系統(tǒng)硬件運(yùn)行的穩(wěn)定和軟件的兼容。主控器結(jié)合控制平臺(tái)對(duì)電網(wǎng)系統(tǒng)內(nèi)各分布式電源、各負(fù)荷回路展開實(shí)時(shí)監(jiān)控和管理,實(shí)現(xiàn)系統(tǒng)整體的穩(wěn)定運(yùn)行。
2 電網(wǎng)運(yùn)行損耗優(yōu)化控制系統(tǒng)軟件設(shè)計(jì)
在系統(tǒng)硬件設(shè)置的基礎(chǔ)上,在考慮安全約束條件的前提下,設(shè)計(jì)電網(wǎng)運(yùn)行損耗優(yōu)化控制系統(tǒng)的軟件,確保所有控制程序在約束條件的限制下,能夠在安全的范圍內(nèi)執(zhí)行損耗優(yōu)化控制任務(wù),提升系統(tǒng)的穩(wěn)定性能。
2.1 設(shè)定電網(wǎng)運(yùn)行損耗基本控制規(guī)則
電網(wǎng)運(yùn)行時(shí),其兩側(cè)饋線輸出的功率分別影響負(fù)荷分布和系統(tǒng)阻抗與兩側(cè)電壓差值;同時(shí),兩側(cè)饋線輸出的功率是獨(dú)立存在的,根據(jù)上述電網(wǎng)運(yùn)行的基本特征,設(shè)定電網(wǎng)運(yùn)行損耗基本控制規(guī)則。
調(diào)節(jié)兩側(cè)母線電壓差,改變電網(wǎng)運(yùn)行時(shí)的循環(huán)功率,實(shí)現(xiàn)兩側(cè)饋線出力的調(diào)節(jié)。當(dāng)電力控制系統(tǒng)由開環(huán)運(yùn)行狀態(tài)轉(zhuǎn)入閉環(huán)運(yùn)行狀態(tài)時(shí),通過執(zhí)行合環(huán)操作,實(shí)現(xiàn)具有保護(hù)作用的電網(wǎng)運(yùn)行損耗控制規(guī)則的設(shè)定。假設(shè)在負(fù)荷相對(duì)穩(wěn)定的條件下,忽略其電壓特性,設(shè)循環(huán)功率為?,在電網(wǎng)兩側(cè)功率變化量Δp大小相同、方向相反的情況下,得到圖2所示的電網(wǎng)運(yùn)行穩(wěn)態(tài)控制規(guī)律等值電路圖[4]。
圖2 電網(wǎng)運(yùn)行等值電路圖
假定A側(cè)饋線出口處的裝置串聯(lián)補(bǔ)償電壓為Ua,補(bǔ)償后出口處的電壓為Ub,得到循環(huán)功率?與串聯(lián)補(bǔ)償電壓Ua和Ub之間的關(guān)系為:

2.2 設(shè)置系統(tǒng)安全約束條件
安全約束條件作為保證系統(tǒng)平穩(wěn)運(yùn)行的重要參數(shù),直接影響電網(wǎng)的運(yùn)行效果,因此在電網(wǎng)運(yùn)行損耗優(yōu)化控制系統(tǒng)軟件設(shè)計(jì)中,引入其約束條件。根據(jù)已經(jīng)獲得的電網(wǎng)控制規(guī)則,設(shè)定的安全約束條件包括機(jī)組運(yùn)行約束和系統(tǒng)約束兩方面[7]。

式中:fi(t)表示機(jī)組i在t時(shí)刻的出力約束函數(shù);Fi(t)表示機(jī)組i在t時(shí)刻的連續(xù)運(yùn)行約束函數(shù)。系統(tǒng)約束包括功率平衡安全約束和旋轉(zhuǎn)備用安全約束。設(shè)B(t)表示t時(shí)段內(nèi)系統(tǒng)B的總負(fù)荷;Z(t)表示同時(shí)段內(nèi)系統(tǒng)的旋轉(zhuǎn)備用容量[9],則功率平衡安全約束和旋轉(zhuǎn)備用安全約束條件可設(shè)置為:
式中:n表示約束次數(shù)。通過上述公式完成對(duì)系統(tǒng)安全約束條件的設(shè)置,保證電網(wǎng)運(yùn)行損耗優(yōu)化控制系統(tǒng)在上述安全約束條件的限制下平穩(wěn)運(yùn)行。
2.3 優(yōu)化電網(wǎng)運(yùn)行損耗控制參數(shù)
在完成約束條件設(shè)置的基礎(chǔ)上,優(yōu)化電網(wǎng)運(yùn)行損耗控制參數(shù),利用小信號(hào)穩(wěn)定性分析法實(shí)現(xiàn)控制參數(shù)的優(yōu)化,使控制系統(tǒng)在遭受小干擾時(shí),可以保持系統(tǒng)同步運(yùn)行的能力。小信號(hào)穩(wěn)定性分析方法圍繞控制系統(tǒng)狀態(tài)矩陣的基本特征展開,根據(jù)狀態(tài)矩陣得到的系統(tǒng)特征值為:

式中:φ表示描述系統(tǒng)特征值的參數(shù);I表示離散參數(shù);k表示系統(tǒng)狀態(tài)矩陣[10]。引入優(yōu)化指標(biāo)重新整理式(4),得到全新的特征參數(shù):

式中:β表示離散后引入的約定參數(shù);λ表示振蕩幅值。已知該特征值φ所對(duì)應(yīng)的振蕩模式可描述為式(6)的形式:

其中:hφ表示特征值φ的振蕩模量;ω表示權(quán)重指數(shù);t表示振蕩時(shí)段;ε表示特約參量。當(dāng)λ<0時(shí),特征值實(shí)部對(duì)應(yīng)振蕩幅值,虛部對(duì)應(yīng)振蕩頻率,則有:

根據(jù)時(shí)間的變化特性,當(dāng)振蕩的幅值趨近于0時(shí),振蕩呈現(xiàn)衰減狀態(tài),則衰減速度的阻尼比為:
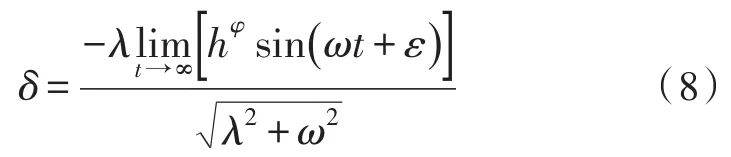

其中:Wn表示n個(gè)振蕩模式的參與狀態(tài)。根據(jù)振蕩頻率,結(jié)合式(8)和式(9),計(jì)算振蕩幅值的靈敏度指標(biāo)為:
式中:f[*]表示靈敏度計(jì)量函數(shù);e表示常數(shù)值。當(dāng)s≥0.95時(shí),實(shí)現(xiàn)對(duì)控制參數(shù)λ的優(yōu)化[12]。
2.4 設(shè)計(jì)電網(wǎng)運(yùn)行損耗分層控制模式
根據(jù)控制規(guī)則、安全約束條件以及優(yōu)化后的控制參數(shù),設(shè)計(jì)電網(wǎng)運(yùn)行損耗分層控制模式。分層控制模式可分為兩大類,包括有功功率分配和無功功率分配[13]。
已知現(xiàn)有條件下,電網(wǎng)系統(tǒng)在穩(wěn)態(tài)運(yùn)行中所有逆變器的運(yùn)行頻率相同,即存在:

根據(jù)電網(wǎng)運(yùn)行損耗一般控制方程,得出有功功率分配控制模式:



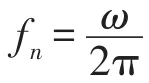
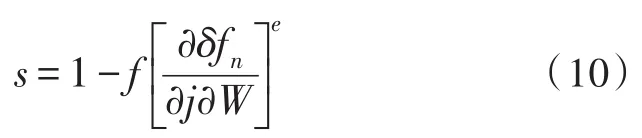
但由于電網(wǎng)中的逆變器與系統(tǒng)公共母線之間在線路阻抗上存在電壓不同、負(fù)荷分布不均勻的問題,導(dǎo)致逆變器虛擬輸出電壓也不相同,圖3為優(yōu)化阻尼比后,兩電網(wǎng)并聯(lián)運(yùn)行的等效模型示意圖[14]。
圖3中,優(yōu)化后的控制參數(shù)和設(shè)置的安全約束條件在一定程度上抵消了干擾數(shù)據(jù),因此得到無功率分配控制方程為:
圖3 電網(wǎng)并聯(lián)運(yùn)行的等效模型

式中:Q0表示初始運(yùn)行功率;Qn表示所有逆變器的總運(yùn)行功率;x表示分配系數(shù);Δx表示約束后的分配值;μ表示分批基準(zhǔn)[15]。通過上述兩個(gè)層面的電網(wǎng)功率分配模式設(shè)計(jì),實(shí)現(xiàn)對(duì)電網(wǎng)運(yùn)行損耗的分層控制,至此在考慮安全約束條件下,電網(wǎng)運(yùn)行損耗優(yōu)化控制系統(tǒng)設(shè)計(jì)完畢。
3 實(shí)驗(yàn)測(cè)試
為驗(yàn)證設(shè)計(jì)的優(yōu)化控制系統(tǒng)的穩(wěn)定性,提出實(shí)驗(yàn)測(cè)試要求,檢驗(yàn)考慮安全約束條件下,所設(shè)計(jì)優(yōu)化控制系統(tǒng)的穩(wěn)定性。為了讓實(shí)驗(yàn)測(cè)試結(jié)果更具有說服力,將該系統(tǒng)與傳統(tǒng)控制系統(tǒng)進(jìn)行對(duì)比,根據(jù)對(duì)比分析結(jié)果,得出具體實(shí)驗(yàn)結(jié)論。
3.1 實(shí)驗(yàn)準(zhǔn)備
建立實(shí)驗(yàn)測(cè)試平臺(tái),將監(jiān)控設(shè)備、主站控器、從站控制器、逆變器以及各個(gè)通訊器,與測(cè)試計(jì)算機(jī)之間建立連接,搭建的實(shí)驗(yàn)測(cè)試環(huán)境如圖4所示。
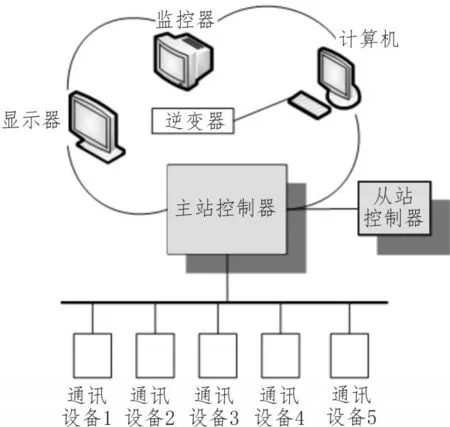
圖4 實(shí)驗(yàn)測(cè)試環(huán)境
實(shí)驗(yàn)測(cè)試系統(tǒng),從主站服務(wù)器的實(shí)時(shí)數(shù)據(jù)庫(kù)中將電網(wǎng)運(yùn)行損耗數(shù)據(jù)提取至工作站,確保系統(tǒng)控制程序在工作站中正常運(yùn)行。設(shè)置實(shí)時(shí)測(cè)試數(shù)據(jù)提取程序,按照該程序得出兩個(gè)電網(wǎng)運(yùn)行損耗控制系統(tǒng)的測(cè)試結(jié)果。實(shí)驗(yàn)共分成兩組進(jìn)行,其中A組為測(cè)試實(shí)驗(yàn)組,B組為測(cè)試對(duì)照組,每一組均進(jìn)行3次損耗控制實(shí)驗(yàn)測(cè)試,每次實(shí)驗(yàn)測(cè)試時(shí)間分別設(shè)定為12小時(shí)、24小時(shí)和48小時(shí)。
3.2 結(jié)果分析
設(shè)置文中設(shè)計(jì)的控制系統(tǒng)為實(shí)驗(yàn)A組,傳統(tǒng)設(shè)計(jì)方法下的控制系統(tǒng)為對(duì)照B組,圖5為實(shí)驗(yàn)測(cè)試對(duì)比結(jié)果。
根據(jù)上述3組測(cè)試結(jié)果可知,文中設(shè)計(jì)的電網(wǎng)運(yùn)行損耗優(yōu)化控制系統(tǒng),在3個(gè)運(yùn)行時(shí)段的測(cè)試下,其穩(wěn)定性指標(biāo)一致保持相對(duì)平穩(wěn)的狀態(tài)。而傳統(tǒng)設(shè)計(jì)方法下的電網(wǎng)運(yùn)行損耗控制系統(tǒng),在0~48小時(shí)的3段檢測(cè)內(nèi),其穩(wěn)定性曲線波動(dòng)越來越劇烈,只在12小時(shí)測(cè)試內(nèi),有較為穩(wěn)定的測(cè)試結(jié)果,超出該時(shí)段后,該系統(tǒng)波動(dòng)較大,無法控制自身運(yùn)行的穩(wěn)定性,導(dǎo)致無法合理控制電網(wǎng)運(yùn)行損耗。上述結(jié)果說明,文中設(shè)計(jì)系統(tǒng)的控制穩(wěn)定性較好,能夠?qū)崿F(xiàn)電網(wǎng)運(yùn)行損耗的優(yōu)化控制[16]。這是由于該系統(tǒng)根據(jù)優(yōu)化后的控制參數(shù)和設(shè)置的安全約束條件,在一定程度上抵消了干擾數(shù)據(jù),從而提高了控制結(jié)果的穩(wěn)定性。
為了進(jìn)一步驗(yàn)證文中設(shè)計(jì)系統(tǒng)的應(yīng)用效果,以抗干擾性為實(shí)驗(yàn)指標(biāo),對(duì)傳統(tǒng)系統(tǒng)和文中設(shè)計(jì)系統(tǒng)進(jìn)行比較,結(jié)果如圖6所示。其中,抗干擾性用數(shù)值進(jìn)行表示,數(shù)值越大,表示抗干擾性能越好。
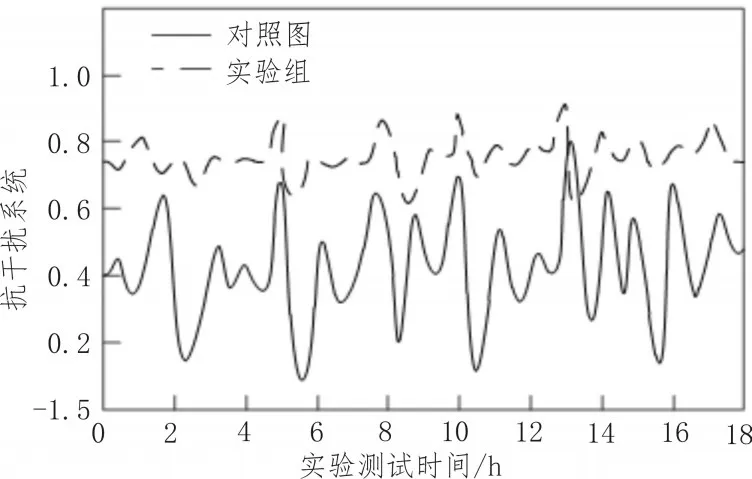
圖6 抗干擾性實(shí)驗(yàn)測(cè)試對(duì)比結(jié)果
分析圖6可知,文中設(shè)計(jì)的系統(tǒng)在實(shí)驗(yàn)測(cè)試時(shí)間內(nèi),抗干擾系數(shù)明顯高于傳統(tǒng)系統(tǒng),并且變化波動(dòng)較小,相比較之下,傳統(tǒng)系統(tǒng)的波動(dòng)較大,說明文中設(shè)計(jì)的系統(tǒng)能夠抵御外界干擾因素帶來的影響,保障電網(wǎng)的穩(wěn)定運(yùn)行,進(jìn)一步說明了考慮安全約束條件的電網(wǎng)運(yùn)行損耗優(yōu)化控制系統(tǒng)的有效性。
4 結(jié)束語(yǔ)
文中設(shè)計(jì)的電網(wǎng)運(yùn)行損耗控制系統(tǒng),在傳統(tǒng)系統(tǒng)設(shè)計(jì)的基礎(chǔ)上,通過設(shè)定一系列穩(wěn)定性指標(biāo)或因素,增加系統(tǒng)在執(zhí)行控制任務(wù)時(shí)的運(yùn)行穩(wěn)定性,使系統(tǒng)可以處在一個(gè)長(zhǎng)時(shí)間穩(wěn)定的工作狀態(tài),實(shí)現(xiàn)了系統(tǒng)的運(yùn)行安全,保證電網(wǎng)運(yùn)行損耗的有效控制。但設(shè)計(jì)的系統(tǒng)沒有著重說明軟件的兼容性,在今后的研究工作中,可以針對(duì)這一問題展開討論。
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
小哥白尼(趣味科學(xué))(2019年6期)2019-10-10 01:01:50
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
